Спосіб автоматичного керування уставками дозаторів реагентів
Номер патенту: 28523
Опубліковано: 10.12.2007
Автори: Ульшин Віталій Олександрович, Шульгін Сергій Костянтинович

Формула / Реферат
Спосіб автоматичного керування уставками дозаторів реагентів, що полягає у прогнозуванні показників якості концентрату, який відрізняється тим, що прогнозування показників якості концентрату та відходів, які використовуються для визначення уставок дозаторів реагентів, здійснюють адаптивною прогнозуючою моделлю кінетики флотопроцесу, базуючись на фізико-хімічних і гідродинамічних властивостях процесу флотації (характеристика вугілля, що флотується, характеристика реагентів, властивості флотомашини), а адаптацію моделі кінетики здійснюють шляхом зміни константи швидкості розділення Кр, подальше керування уставками здійснюють, формуючи сигнали на дозатори реагентів пропорційно різниці між фактичною і заданою зольністю концентрату.
Текст
Спосіб автоматичного керування уставками дозаторів реагентів, що полягає у прогнозуванні показників якості концентрату, який відрізняється тим, що прогнозування показників якості концентрату та відходів, які використовуються для 3 28523 Удосконалення моделі константи швидкості флотації досягається наступним чином. Використовують як радіус трубки в перетині зіткнення частинки і пухирця суму радіусу пухирця і радіусу частинки, при цьому значення величини радіусу пухирця залежатиме від розрахованих поверхневих і гідродинамічних сил; як адсорбційну константу речовини, по відношенню до даного мінералу використовують коефіцієнт де Бура і Кюстерса, яким враховують кількість атомів адсорбенту на одиницю об'єму, об'єм і характер пор адсорбенту, взаємний вплив адсорбенту і адсорбату, що виражений через постійну Кірквуда [див. Герасимов Я. И., Древинг В.П., Еремин Е.Н. Курс физической химии. - М.: Издательство "Химия", 1964. - Т.1. - 624с, илл.]. Для використання вдосконаленої моделі константи швидкості флотації в якості складової частини системи автоматичного управління процесом флотації на її основі розроблено математичну модель флотопроцесу, яка забезпечує прогнозування кількості та якості продуктів, що надходять до концентрату та відходів. Для підвищення точності прогнозування адаптують розроблену математичну модель кінетики по фактичних результатах збагачення шляхом зміни константи швидкості розділення Kр. Таким чином, з урахуванням наявності частки залишку, що не флотується, щільності розподілу ~ часток за флотуємістю j(K) й щільності розподілу K m ax Ad * = 1 k t0 часток, що флотуються, Kp d* ò 0 Kp tj ( ¥ * * ò × E (t, m) × e + C¥ t0 Cr _ p = ) Q* × rпенооб n Q ucx Mп - концентрація реагентупіноутворювача; rсоб - щільність реагенту-збирача; r0 - щільність органічної маси вугілля; rпенооб - щільність реагенту-піноутворювача; Мп - молярна маса реагенту-піноутворювача; Q* = Qucxrucx q1* c c прогнозована витрата реагенту-збирача; у к* ×t ò концентрація реагенту-збирача; tj ) ~ ò ò (1 - C )× j(K ) × E(t, m )dtdK 0 t0 , ( ) ( ¥ æ b × Cr _ s B × Cr _ p ö 2 ÷×d K* = B2 × l × ç ç b × Cr _ s + 1 B × Cr _ p + 1 ÷ è ø прогнозована константа швидкості флотації; æ r × 100 - Аd + 2700 Ad ö ucx ucx ÷ Q* × rсоб × ç 0 c ÷ ç 100 ø è Cr _ s = Qucx × C ) ~ C¥ × d K* + 1 - C¥ × j(K* ) ò ò (1 - C ) ( ) y (K, t ) = 1 - C¥ × A0 = 1 K m axt j d K* - імпульсна складова, що характеризує наявність залишку, що не флотується; K p t max ~ ) ( ) ò ò j(K × E t, m dtdK 0 t0 сумарний витяг часток, що флотуються, у відходи; Границі інтегрування лежать у межах від Kp до Kmax для часток, що переходять до концентрату, і від 0 до Кp для часток, що переходять до відходів, й від t0 до tmах згідно мінімальному та максимальному часу перебування часток у флотомашині. Визначення прогнозованої зольності відходів і зольності концентрату залежно від фізико-хімічних і гідродинамічних особливостей протікання процесу і з урахуванням об'ємних витрат реагенту збирача і піноутворювача пропонують за такими формулами: ( æ tj ö * ç ÷ × ç1 - E( t, m ) × e - к ×t dt÷ dK* ç t ÷ ~ 0 ø × j( K* ) × E (t, m )dtdK* è де K max t max KP сумарний витяг концентрат; ) K p t0 e(K , t) + y(K , t ) + C¥ = 1 , ~ ) ò ò j(K) × E t, m dtdK ( ) ( )( ~ C¥ × d K* + 1 - C¥ × j( K* ) , де ( ò Kp часток за часом перебування в апараті Е(t, m) процес безперервної флотації можна описати диференціальним рівнянням виду: e(K, t) = 1 - C¥ × 4 * dtdK *= прогнозована витрата Qn Qucxq1* n реагенту-піноутворювача. Для встановлення адекватності одержаної моделі реальному процесу проводять аналіз залишків, що є різницями між спостережуваними і модельованими значеннями зольності концентрату і відходів. Критерієм адекватності моделі є нормальний розподіл залишків, тобто коли останні є незалежними і містять тільки шум без систематичних компонент. Перевірка гіпотези на відповідність огинаючих кривих на гістограмах залишків нормальному закону розподілу за допомогою критерію х2 розподілу, показала, що вибіркова статистика х2 менше критичної точки х2 - розподілу для всіх даних випадків. Отже, гіпотеза про вибраний теоретичний нормальний закон розподілу, що відображається огинаючими кривими, узгоджується з експериментальними даними, тобто гіпотеза приймається при відповідних рівнях значущості. Отже залишки розподілені по нормальному закону, що указує на адекватність моделі кінетики реальному процесу. Таким чином, поставлена задача удосконалення способу автоматичного управління уставками дозаторів реагентів досягається тим, що у вищевказаному способі, який полягає у прогнозуванні показників якості концентрату, згідно корисної моделі, прогнозування показників зольності концентрату та відходів, які використовуються для визначення уставок дозаторів реагентів здійснюють адаптивною 5 28523 прогнозуючою моделлю кінетики флотопроцесу, засновуючись на фізико-хімічних і гідродинамічних властивостях процесу флотації (характеристика вугілля, що флотується, характеристика реагентів, властивості флотома-шини), а адаптацію моделі кінетики здійснюють шляхом зміни константи швидкості розділення Kр, подальше управління уставками здійснюють, формуючи сигнали на дозатори реагентів пропорційно різниці між фактичною і заданою зольністю концентрату. Спосіб здійснюють наступним чином. Корекцію уставок дозаторів реагентів здійснюють по прогнозованих значеннях зольності концентрату, за умови, що різниця між фактичною і прогнозованою зольністю не перевищує певної величини. Інакше здійснюють корекцію математичної моделі флотації шляхом зміни значення константи розділення Kр. У випадку, якщо адаптація призводить до зменшення величини різниці фактичної і прогнозованої зольності концентрату подальшу корекцію здійснюють шляхом формування сигналу на дозатори реагентів пропорційно різниці фактичної зольності концентрату і зольності, що вимагається. q AKП с ì 1* d d d d ïq c , если A k = A kз Ù A 0 ³ A 0з , ï ï 1* = íq c - k c × A d - Ad , если A d - A d ¹ 0 Ù A d - A d* £ D , к к k kз к кз ï 1* 1 d d* ïq + Dq c , если A к - A к > D. ï î ( ) де Dq1 = ndq c [n ]sign ( DK p ), n = 1,2,...m, c DK p = - DK p sign ( Ad - Ad * ), k k kc - константа, обумовлена експериментально при налагодженні системи, dqс - крок зміни питомої витрати збирача, DKр - крок зміни коефіцієнта Кр, обумовлений по графіках, QC,QП=f(DKp), побудованих для конкретних флотомашин. ì 1* d d d d ïqn , åñëè A k = A kç Ù A 0 ³ A 0ç, ï AKÏ = ïq1* + k æ A d - A d ö, åñëè A d - A d ¹ 0 Ù A d - A d* £ D, qn í n ê ê êç ê nç k kç ÷ è ø ï ï 1* 1 , åñëè A d - A d* > D. ê ê ïqn + Dqn î де Dq1 = -ndqn [n]sign( DKp ), n = 1,2,...m, n DKp = DKpsign( Ad - Ad* ), kç k dqn крок зміни питомої витрати піноутворювача. Питомі витрати реагентів, що подаються до камер флотомашин, визначаються по наступних алгоритмах. 6 ì0, если A d = Ad Ú Ad ³ Ad . k kз o oз ï ï q 2 = í Dq 2 , если Ad ³ Ad , c o oз c ï 2 Dq c = k 2 ( Ad - Ad ), ï c o oз î . ì0, если A d = Ad Ú A d ³ Ad з , k kз o 0 ï ï q1 = í Dq 2 , если Ad ³ Ad , n o oз n ï 2 Dq n = k 2 ( Ad - A d ), ï n o oз î Таким чином, запропонований спосіб забезпечує зменшення втрат вугілля з відходами, за рахунок стабілізації питомих витрат реагентів, які адаптуються до параметрів флотопроцесу, що змінюються, в залежності від змін різниці між прогнозованими і фактичними показниками зольності концентрату.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of automatic control of settings of measuring hoppers of reagents
Автори англійськоюUlshyn Vitalii Oleksandrovych, Shulhin Serhii Kostiantynovych
Назва патенту російськоюСпособ автоматического управления уставками дозаторов реагентов
Автори російськоюУльшин Виталий Александрович, Шульгин Сергей Константинович
МПК / Мітки
МПК: B03B 13/00
Мітки: автоматичного, спосіб, дозаторів, керування, реагентів, уставками
Код посилання
<a href="https://ua.patents.su/3-28523-sposib-avtomatichnogo-keruvannya-ustavkami-dozatoriv-reagentiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб автоматичного керування уставками дозаторів реагентів</a>
Спосіб двоканального адаптивного автоматичного керування процесами вуглезбагачення
Номер патенту: 3708
Опубліковано: 15.12.2004
Автори: Килимник Олег Вікторович, Ульшин Віталій Олександрович, Зубов Дмитро Анатолійович
МПК: B03B 13/00
Мітки: автоматичного, адаптивного, двоканального, процесами, керування, вуглезбагачення, спосіб
Формула / Реферат:
Спосіб двоканального адаптивного автоматичного керування процесами вуглезбагачення, який полягає у тому, що зольність концентрату автоматично стабілізують шляхом подачі відповідних керуючих впливів, оптимальні значення яких обчислюють на базі аналізу прогнозованих станів процесів вуглезбагачення, які представляють як двоканальні, нестаціонарні, стохастичні об'єкти керування з різнотемповими каналами і великим запізнюванням, який відрізняється...
Спосіб автоматичного регулювання процесу освітлення оборотних вод
Номер патенту: 22511
Опубліковано: 25.04.2007
Автори: Худяков Віктор Миколайович, Ульшин Віталій Олександрович
МПК: B03B 13/00
Мітки: процесу, оборотних, освітлення, спосіб, вод, автоматичного, регулювання
Формула / Реферат:
Спосіб автоматичного регулювання процесу освітлення оборотних вод, що полягає у вимірі щільності вмісту твердої фази в освітленій воді і регулюванні витрати згущеного продукту, який відрізняється тим, що зольність твердої фази вимірюють у вихідному постачанні і визначають питоме навантаження, а потім коректують витрату за постачанням обернено пропорційно зольності твердої фази.
Дорожня розмітка для автоматичного керування рухом транспортних засобів та спосіб автоматичного керування рухом
Номер патенту: 80389
Опубліковано: 25.09.2007
Автори: Сніцарук Леонід Адамович, Тюлькін Сергій Павлович
МПК: G06G 7/78, E01C 9/00, G08G 1/00
Мітки: автоматичного, рухом, транспортних, спосіб, дорожня, розмітка, засобів, керування
Формула / Реферат:
1. Дорожня розмітка для автоматичного керування рухом транспортного засобу, що складається з ліній, нанесених кольоровим матеріалом на проїзну частину дороги, яка відрізняється тим, що вона містить додаткові лінії дорожньої розмітки, в яких вздовж напрямку руху транспортних засобів за заданим законом чергуються ділянки ліній з високою та низькою електропровідністю з можливістю одержання інформації від індуктивних давачів, встановлених на...
Спосіб автоматичного керування процесом збагачення рудних корисних копалин
Номер патенту: 27847
Опубліковано: 12.11.2007
Автор: Подгородецький Микола Сергійович
МПК: B03B 13/00
Мітки: копалин, збагачення, спосіб, корисних, рудних, процесом, керування, автоматичного
Формула / Реферат:
Спосіб автоматичного керування процесом збагачення рудних корисних копалин, що включає послідовне подрібнення вхідного рудного матеріалу у млині, класифікацію його згідно з крупністю у класифікаторі та розподіл класифікованого рудного матеріалу у збагачувальному апараті на збагачену і збіднену складові, послідовне формування потоку еталонної рідини та суспензії збагаченого матеріалу у вихідній технологічній ємності, вплив на потік суспензії...
Пристрій для автоматичного регулювання процесу освітлення оборотних вод
Номер патенту: 22505
Опубліковано: 25.04.2007
Автори: Худяков Віктор Миколайович, Ульшин Віталій Олександрович
МПК: B03B 13/00
Мітки: освітлення, пристрій, процесу, вод, регулювання, автоматичного, оборотних
Формула / Реферат:
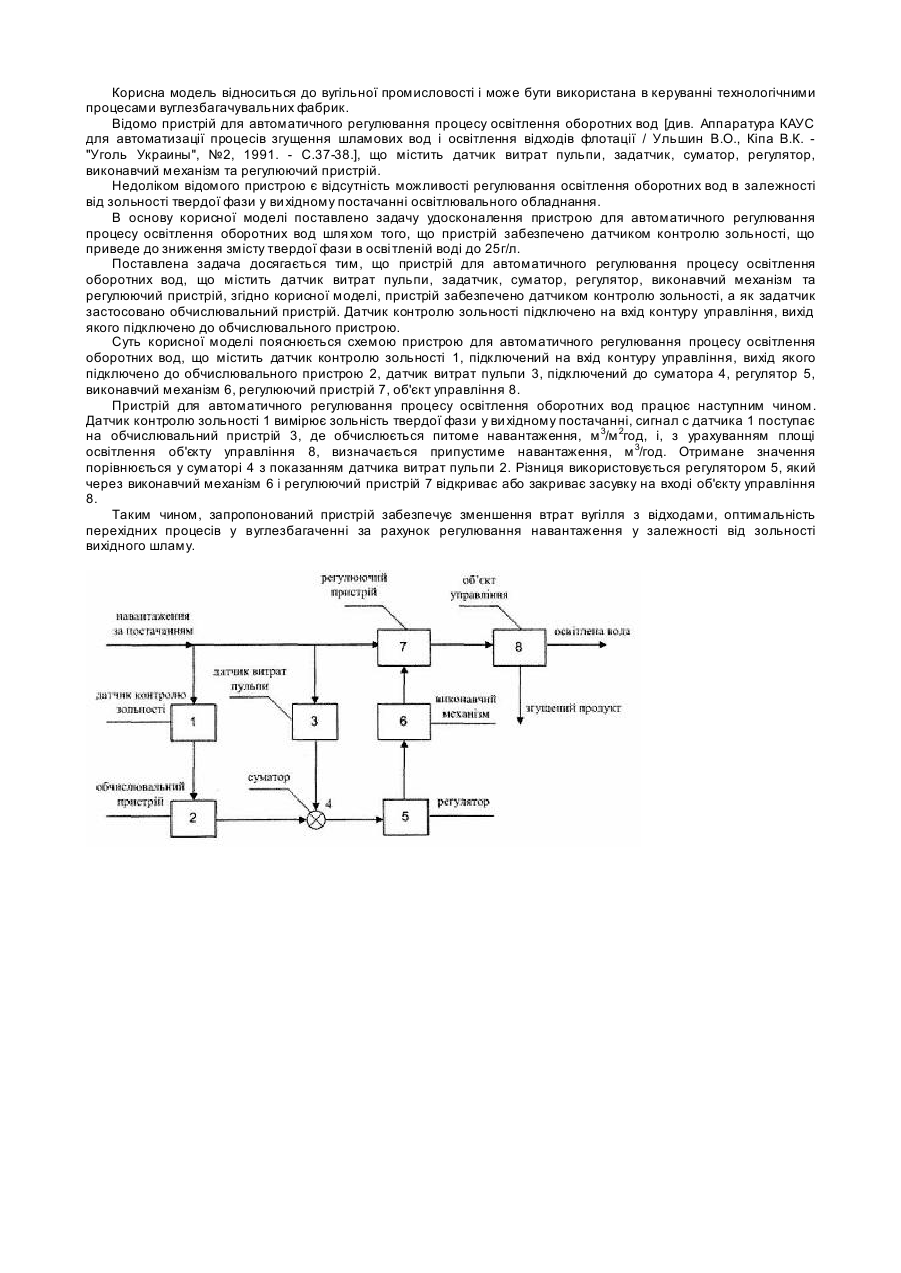
Пристрій для автоматичного регулювання процесу освітлення оборотних вод, який містить датчик витрати пульпи, задатчик, суматор, регулятор, виконавчий механізм та регулюючий пристрій, який відрізняється тим, що пристрій забезпечено датчиком контролю зольності, а як задатчик застосовано обчислювальний пристрій, датчик контролю зольності підключено на вхід контуру керування, вихід якого підключено до обчислювального пристрою.
Попередній патент: Спосіб диференційної діагностики остеоартрозу у підлітків на тлі гіпермобільного синдрому і без нього
Наступний патент: Пристрій для керування потоками двофазних середовищ
Випадковий патент: Засіб для інформування і/або рекламування