Спосіб двоканального адаптивного автоматичного керування процесами вуглезбагачення
Номер патенту: 3708
Опубліковано: 15.12.2004
Автори: Ульшин Віталій Олександрович, Зубов Дмитро Анатолійович, Килимник Олег Вікторович



Формула / Реферат
Спосіб двоканального адаптивного автоматичного керування процесами вуглезбагачення, який полягає у тому, що зольність концентрату автоматично стабілізують шляхом подачі відповідних керуючих впливів, оптимальні значення яких обчислюють на базі аналізу прогнозованих станів процесів вуглезбагачення, які представляють як двоканальні, нестаціонарні, стохастичні об'єкти керування з різнотемповими каналами і великим запізнюванням, який відрізняється тим, що оптимальні значення керуючих впливів обчислюють у реальному масштабі часу на базі повного перебору можливих значень двох керуючих впливів, обліку взаємного впливу каналів керування і прогнозування станів процесів вуглезбагачення на основі нелінійної, динамічної апроксимуючої моделі, коефіцієнти якої обчислюють методом найменших квадратів.
Текст
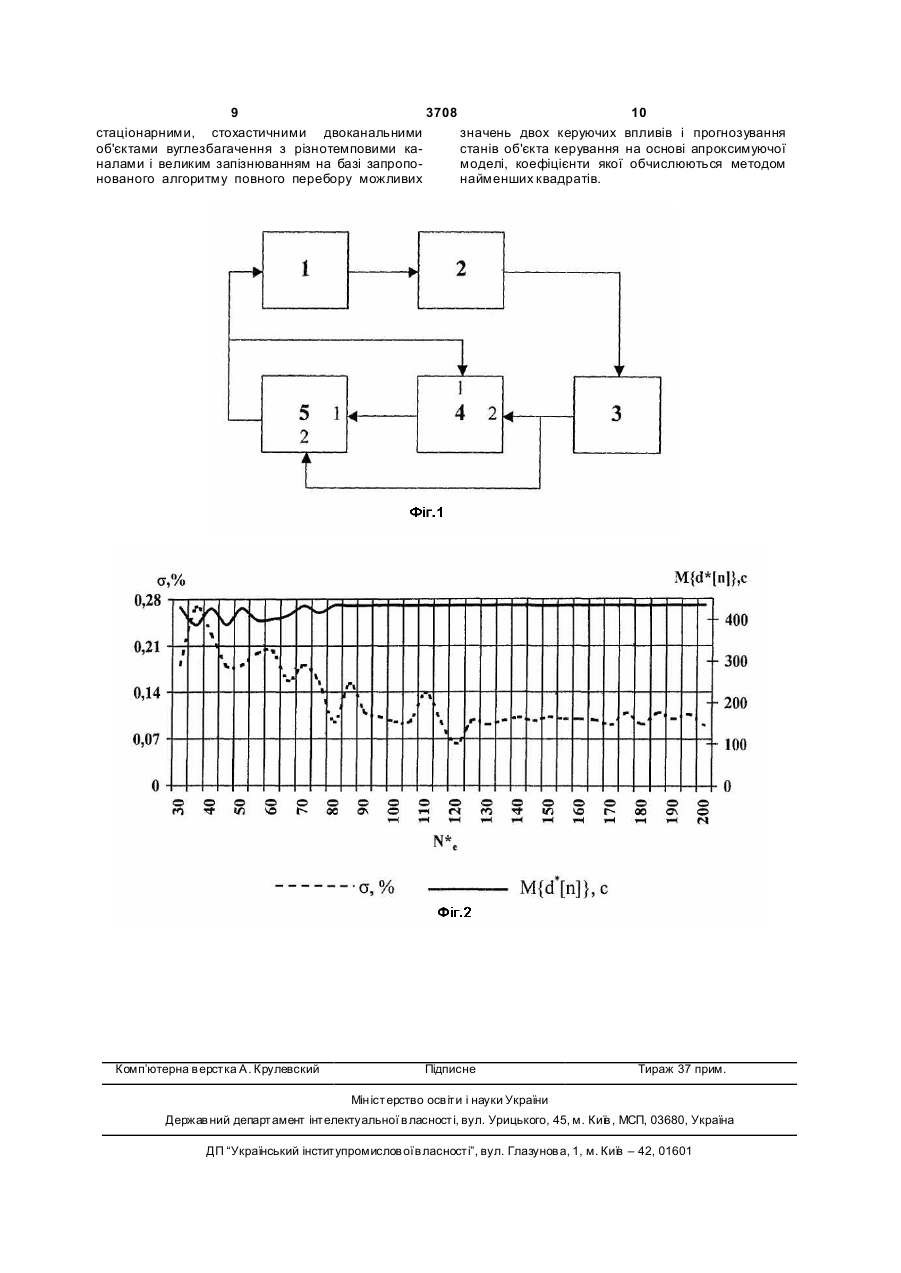
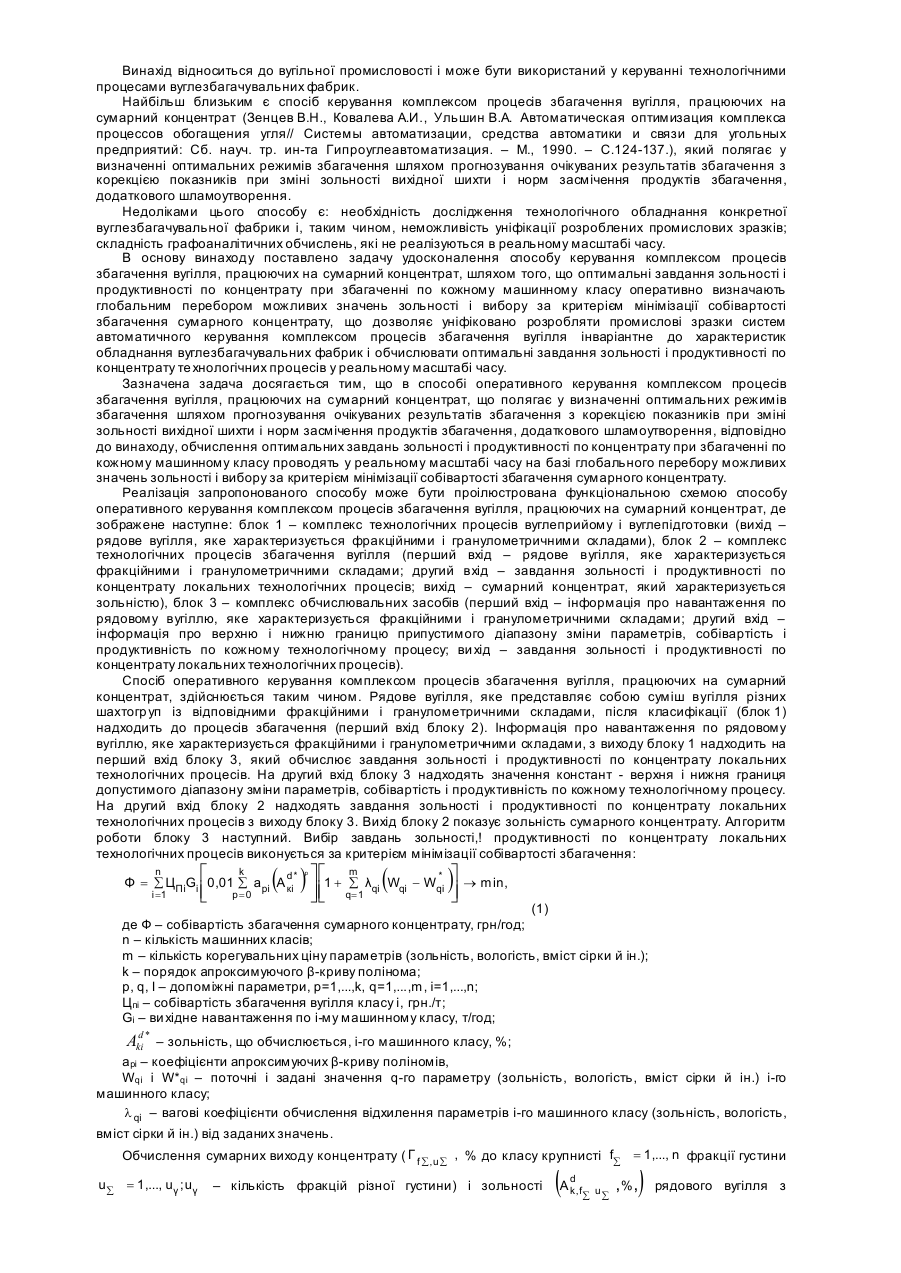
Спосіб двоканального адаптивного автоматичного керування процесами вуглезбагачення, який полягає у тому, що зольність концентрату автоматично стабілізують шляхом подачі відповідних керуючи х впливів, оптимальні значення яких обчис 3 3708 4 апроксимуючої моделі, коефіцієнти якої обчислюнти нелінійної моделі об'єкта керування; другий ють на навчальній вибірці даних методом найвхід блоку 5 - відфільтрована інформація про зоменших квадратів. Представлення процесів вуглельність вугільного концентрату; ви хід блоку 5 збагачення динамічною моделлю приведе до обчислені значення двох керуючи х впливів). оптимальності перехідних процесів у вуглезбагаСпосіб двоканального адаптивного автоматиченні, апроксимація процесів вуглезбагачення нечного керування процесами вуглезбагачення здійлінійними залежностями приведе до меншої (у поснюється таким чином. Рядове вугілля після кларівнянні з лінійною апроксимацією) дисперсії сифікації подають на відповідні процеси зольності вугільного концентрату, що забезпечить збагачення (блок 1): вугілля розміром до 1 мм - на зменшення втрат вугілля з відходами. флотацію, від 1 до 13 мм - на відсадку, більш 13 Реалізація запропонованого способу може бумм - на важкі середовища (дане ранжирування ти проілюстрована структурною схемою двоканавугілля обумовлено характеристиками вуглезбагального адаптивного автоматичного керування чувального обладнання і є традиційним для вітчипроцесами вуглезбагачення, де зображено настузняних вуглезбагачувальних фабрик). Одночасно пне: блок 1 - об'єкт керування (об'єкт керування на вхід блоку 1 подають значення двох керуючих флотомашина, відсаджувальна машина, важкосевпливів (вихід блоку 5), змінюючи які досягають редовищна установка або інше вуглезбагачувальзаданої зольності вугільного концентрату. Потік не обладнання; вхід блоку 1 - значення двох керувугільного концентрату з виходу блоку 1 подають ючих впливів: питомі витрати реагентів на вхід блоку 2, де проводять вимір його зольності. піноутворювача і збирача для флотопроцесу, виІнформацію про зольність вугільного концентрату сота і ступінь розпущеності породної постелі для (вихід блоку 2) подають на вхід блоку 3, де відбувідсадки, густина і в'язкість магнетитової суспензії вається її фільтрація (відділення корисного сигнадля важких середовищ; ви хід блоку 1 - потік вугілу від шуму) на основі алгоритму стохастичної льного концентрату, що характеризується зольнісапроксимації. Відфільтровану інформацію про зотю); блок 2 - датчик виміру зольності вугільного льність вугільного концентрату (ви хід блоку 3) поконцентрату (вхід блоку 2 - потік збагаченого вудають на другий вхід блоку 4, де її разом з інфоргілля; вихід блоку 2 - інформація про зольність мацією про значення двох керуючих впливів вугільного концентрату); блок 3 - фільтрація вихід(перший вхід блоку 4) використовують для ідентиної координати методом стохастичної апроксимафікації коефіцієнтів нелінійної моделі об'єкта керуції (вхід блоку 3 - інформація про зольність вугільвання (блок 1). Відфільтровану інформацію про ного концентрату; ви хід блоку 3 - відфільтрована зольність вугільного концентрату (вихід блоку 3) інформація про зольність вугільного концентрату); також подають на перший вхід блоку 5, де її разом блок 4 - ідентифікація коефіцієнтів нелінійної моз інформацією про ідентифіковані коефіцієнти неделі об'єкта керування (перший вхід блоку 4 - зналінійної моделі об'єкта керування (вихід блоку 4) чення двох керуючих впливів; другий вхід блоку 4 використовують для обчислення значень двох відфільтрована інформація про зольність вугільнокеруючих впливів (вихід блоку 5). го концентрату; вихід блоку 4 - ідентифіковані коАлгоритм роботи блоку 3 наступний. Інформаефіцієнти нелінійної моделі об'єкта керування); цію про зольність вугільного концентрату у[n] (де n блок 5 - обчислення значень двох керуючих впли- дискретний момент часу) об'єкта керування (блок вів (перший вхід блоку 5 - ідентифіковані коефіціє1) фільтрують методом стохастичної апроксимації: де у(1)[n] - апроксимоване значення зольності вугільного концентрату в дискретний момент часу n; kа - у загальному випадку змінний у часі коефіцієнт, що задовольняє умовам теореми Дворецького. Алгоритм роботи блоку 4 наступний. Апроксимуюча об'єкт керування (блок 1) нелінійна, двоканальна, динамічна модель з великим запізнюванням і різнотемповими каналами керування має вигляд: де u1[n],u2[n] - керуючий вплив відповідно по першому і другому каналах керування; методом найменших квадратів на навчальній вибірці даних у(3) довжиною Ne, де d*[n] визначають з рівняння (d*[n] змінюється з дискретністю 1 с від мінімального dmin до максимального dmax значень): c * [n] ¸ c* [n], d*[n] - коефіцієнти нелінійної мо0 14 делі об'єкта керування (блок 1), апроксимовані 5 3708 6 Навчальна вибірка даних для розрахунку коефіцієнтів нелінійної моделі базується на наступному евристичному чотирьохрівневому представленні даних: 1. У кожен дискретний момент часу інформація з датчиків - у[n]. 2. У кожен дискретний момент часу фільтрація у[n] методом стохастичної апроксимації по рівнянню (1) - у(1)[n]. 3. У кожен дискретний момент часу обчислення елемента тривимірного масиву у(2) по формулі (при запуску програми всі елементи обнуляються) де N*e - кількість інтервалів довжиною (ymaxymin-2 smax)/N*e у діапазоні (ymах+smах;ymin-smах) зміни у[n]; ymax, ymin - максимально і мінімально можливі значення у[n]; smax - позитивна константа, що представляє собою максимальне середньоквадратичне відхилення значення зольності концентрату від уставки; Trunc(×) - математична операція виділення цілої частини дійсного аргументу. Причому елементи тривимірного масиву у(2) формуються даними, що задовольняють умові: масиву у(2); m=1,...,N e). Алгоритм роботи блоку 5 наступний. Обчислення двох керуючих впливів u1[n] і u2[n] (з відповідним екстраполюванням вихідної координати; u1,min , u2,min - невід'ємні константи, які відображують мінімально можливі значення двох керуючих впливів відповідно по першому і другому каналах керування; u1[n] і u2[n] змінюються з відповідною дис 4. При закінченні Ne дискретних моментів часу формування нової навчальної вибірки даних у(3)[m]=у( 1)[у(2)] довжиною Ne з ненульових елементів тривимірного масиву у( 2) (Ne відповідно дорівнює кількості ненульових елементів тривимірного Екстраполювання апроксимованого значення зольності вугільного концентрату (j=1,...,d*[n]) проводиться за формулою: * кретністю u1,min ³ u* min від мінімального до 2, максимального значень; u1,max, u2,max - невід'ємні константи, які відображають максимально можливі значення двох керуючих впливів відповідно по першому і другому каналах керування; аргументом функції виділення мінімуму є критерій якості на ковзному інтервалі оптимізації, де f,q,r 1,r2 - вагові коефіцієнти, N - довжина інтервалу оптимізації, у3 уставка зольності вугільного концентрату): 7 Приклад реалізації запропонованого способу розглянемо на основі протоколу дослідження блоків 3, 4 і 5 для умов флотаційного відділення вуглезбагачувальної фабрики. При дослідженні змінні мали наступні значення (розглядаються канали керування питомі витрати реагентів збирача u1[n] і піноутворювача u2[n] - зольність флотоконцентрату y[n]): dmin=390 с, dmax=460 c, ymin= 3 %, ymax=13 %, u1,min=3000 г/т, * u1,max=4000 г/т, u2,min=7,5 г/м 3, u 2,max=9 г/м 3, u1,min = 1 г/т, u* ,min =0,01 г/м 3, smax=0,5 %, k a=0,5, f=0, q=1, 2 r1=r2=0, N=1, y3=9,6 %, y01 = y0 = 9% (початкові 0 значення зольності вугільного концентрату), u 0, s =u1,min=3000 г/т (початкові значення керуючого 1 впливу по першому каналу керування, s=(-dmax-1 ),...,(-1)), u0, s =u2,min=7,5 г/м 3 (початкові значення 2 керуючого впливу по другому каналу керування), де y1 [n],y2 [n] - вихідна координата відповідно по першому і другому каналах керування. Аналіз отриманих результатів (див. графік дослідження впливу N*е на середньоквадратичне відхилення зольності концентрату s від заданого значення і середнє значення апроксимованого запізнювання M{d*[n]} процесу флотації) показує: середнє значення апроксимованого запізнювання M{d*[n]} інваріантне зміні N*e; при збільшенні N*e спостерігається тенденція до зменшення середньоквадратичного відхилення зольності вугільного концентрату s, яке на всьому інтервалі варіювання N*e відповідає технологічному регламентові (до 1%). 3708 8 a1,1[n]=-0,9956616120255, b1,1[n]=0,004338387974494, а2,1[n]=0,9950124791927, b2,1[n]=0,004987520807318 (a1,1[n],b 1,1 [n],a2,1[n],b 2,1 [n] - коефіцієнти лінійної частини об'єкта керування, яка моделюється аперіодичними ланками першого порядку з одиничними коефіцієнтами підсилення, постійними часу по першому каналу – T1[n]=230 с, по другому T2[n]=200 c, d1[n]=400 с (реальне запізнювання по першому каналу керування), d2[n]=450 с (реальне запізнювання по другому каналу керування), с0[n]=0,323, с1[n]=0,0014366485013624, с2[n]=0,855582822, с3[n]=-0,0000001382444, с4[n]=0,015875644548, с5[n]=-0,000004764213 (с1[n],c 2[n],c 3(n],c 4[n],с 5[n] - коефіцієнти нелінійної частини моделі об'єкта керування), sн [n]=0,0002 % (середньоквадратичне відхилення шуму спостереження νΗ[n]), n=1,...,28000, період квантування 1 с. Модель об'єкта керування записується у вигляді: Для розглянутого класу двоканальних процесів вуглезбагачення при використанні запропонованого переборного алгоритму керування основна задача настроювання системи зводиться до вибору такого значення N*e, при якому досягається необхідна якість регулювання вихідної координати. Таким чином, запропонований спосіб забезпечує зменшення втрат вугілля з відходами, оптимальність перехідних процесів у вуглезбагаченні за рахунок використання динамічної апроксимуючої об'єкт керування моделі, меншу дисперсію зольності вугільного концентрату на основі нелінійної апроксимації експериментальних даних (у порівнянні з лінійною апроксимацією) і керування не 9 3708 10 стаціонарними, стохастичними двоканальними значень двох керуючих впливів і прогнозування об'єктами вуглезбагачення з різнотемповими кастанів об'єкта керування на основі апроксимуючої налами і великим запізнюванням на базі запропомоделі, коефіцієнти якої обчислюються методом нованого алгоритму повного перебору можливих найменших квадратів. Комп’ютерна в ерстка А. Крулевский Підписне Тираж 37 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститупромислов ої в ласності”, вул. Глазунов а, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Автори англійськоюUlshyn Vitalii Oleksandrovych
Автори російськоюУльшин Виталий Александрович
МПК / Мітки
МПК: B03B 13/00
Мітки: вуглезбагачення, адаптивного, спосіб, автоматичного, двоканального, процесами, керування
Код посилання
<a href="https://ua.patents.su/5-3708-sposib-dvokanalnogo-adaptivnogo-avtomatichnogo-keruvannya-procesami-vuglezbagachennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб двоканального адаптивного автоматичного керування процесами вуглезбагачення</a>
Спосіб оперативного керування комплексом процесів збагачення вугілля, працюючих на сумарний концентрат
Номер патенту: 64990
Опубліковано: 15.03.2004
Автор: Зубов Дмитро Анатолійович
МПК: B03B 13/00
Мітки: спосіб, вугілля, працюючих, збагачення, керування, оперативного, концентрат, процесів, комплексом, сумарний
Формула / Реферат:
Спосіб оперативного керування комплексом процесів збагачення вугілля, працюючих на сумарний концентрат, який полягає у визначенні оптимальних режимів збагачення шляхом прогнозування очікуваних результатів збагачення з корекцією показників при зміні зольності вихідної шихти і норм засмічення продуктів збагачення, додаткового шламоутворення, який відрізняється тим, що обчислення оптимальних завдань зольності і продуктивності по концентрату при...
Пристрій для адаптивного керування процесом металообробки
Номер патенту: 35845
Опубліковано: 16.04.2001
Автор: Коцюбинський Віктор Семенович
МПК: G05B 13/02
Мітки: процесом, керування, пристрій, адаптивного, металообробки
Формула / Реферат:
Пристрій для адаптивного керування процесом металообробки, до складу якого входить блок завдання, вихід якого з'єднаний з першим входом суматора , вихід суматора з'єднаний зі входом електроприводу подачі, підключеного виходом зі входом датчика швидкості подачі, і зі входом редуктора приводу подачі, вихід редуктора з'єднаний із верстатом, який містить електродвигун приводе шпинделя верстати, який містить датчик потужності, вихід якого...
Спосіб виміру, контролю і керування загальношахтними процесами виробництва та система для його реалізації
Номер патенту: 23948
Опубліковано: 31.08.1998
Автори: Журибіда Василь Іванович, Пилипенко Володимир Григорович, Кащич Анатолій Михайлович, Сіпатов Сергій Сергійович, Матвієнко Микола Павлович, Морозов Анатолій Олексійович
МПК: G06F 15/18, G05B 15/00
Мітки: процесами, реалізації, загальношахтними, виробництва, контролю, система, керування, спосіб, виміру
Текст:
...- N2, раз,.... k-ая - Nk раз. При этом Тогда с учетом формулы (3) можно записать, что полный цикл измерения и контроля состояния объекта при использовании предлагаемого способа сокращается до величины где Отсюда следует, что благодаря повышению быстродействия измерения и контроля обеспечивается резервирование каналов опроса в течение времени Тсв, где дли тельность резервирования причем Tk - интервал времени между последовательными...
Пристрій автоматичного керування рекуперативним гальмуванням електрорухомого складу постійного струму
Номер патенту: 70566
Опубліковано: 15.10.2004
Автор: Устименко Дмитро Володимирович
МПК: B60L 7/00, B60L 15/20
Мітки: складу, постійного, рекуперативним, пристрій, автоматичного, струму, електрорухомого, гальмуванням, керування
Формула / Реферат:
Пристрій автоматичного керування рекуперативним гальмуванням електрорухомого складу постійного струму, що містить статичний збудник, з'єднаний виходом з незалежною обмоткою збудження тягового двигуна, а входом - з широтно-імпульсним модулятором, до входу якого під'єднаний регулятор струму рекуперації, який відрізняється тим, що він має додатковий блок завдань і початкових умов та розв'язувальний блок, які з'єднані між собою послідовно, вихід...
Спосіб автоматичного керування процесом згущення пульпи
Номер патенту: 61372
Опубліковано: 17.11.2003
Автори: Шпильовий Леонід Вікторович, Білецький Володимир Степанович
МПК: B01D 21/00
Мітки: керування, згущення, спосіб, автоматичного, процесом, пульпи
Формула / Реферат:
Спосіб автоматичного керування процесом згущення пульпи шляхом контролю вагових витрат твердої фази в згущеній пульпі та її густини, та регулювання співвідношення вагових витрат твердої фази зміною об'ємних витрат згущеної пульпи та корегуванням заданого співвідношення в залежності від густини згущеної пульпи, який відрізняється тим, що контролюють вагові витрати твердої фази в ущільненому осаді, що переміщується скребками ферми до...
Попередній патент: Пристрій для випробування герметичності з’єднання гнучкого шланга з жорстким патрубком за допомогою хомута
Наступний патент: Пристрій для фотодруку