Пристрій для вимірювання відстані до струмопровідної поверхні
Номер патенту: 31940
Опубліковано: 25.04.2008
Автори: Шульженко Микола Григорович, Гуров Юрій Никифорович, Депарма Олександр Вадимович, Чугрєєв Анатолій Іванович, Цибулько Вадим Йосипович, Єфремов Юрій Геннадійович, Мєтєльов Леонід Дмитрович
Формула / Реферат
Пристрій для вимірювання відстані до струмопровідної поверхні, що містить корпус-екран із розташованими в ньому двома котушками індуктивності, включеними відповідно в коло опорного і вимірювального автогенераторів, виходи яких підключені до входів перетворювача частоти, а вихід перетворювача частоти через послідовно з'єднані фільтр, частотний детектор і підсилювач підключений до входу вимірювального блока, а також суматор, джерело опорної напруги та струмопровідний елемент, установлений перед котушкою опорного автогенератора, який відрізняється тим, що в пристрій уведені пружноінерційний і пружнов'язкий елементи, а струмопровідний елемент установлений з можливістю його переміщення, крім цього, до першого входу суматора підключений пристрій усереднення сигналу, другий вхід з'єднаний із джерелом опорного сигналу, а вихід, через керувальний елемент, підключений на другий вхід підсилювача та утворює зворотний зв'язок.
Текст
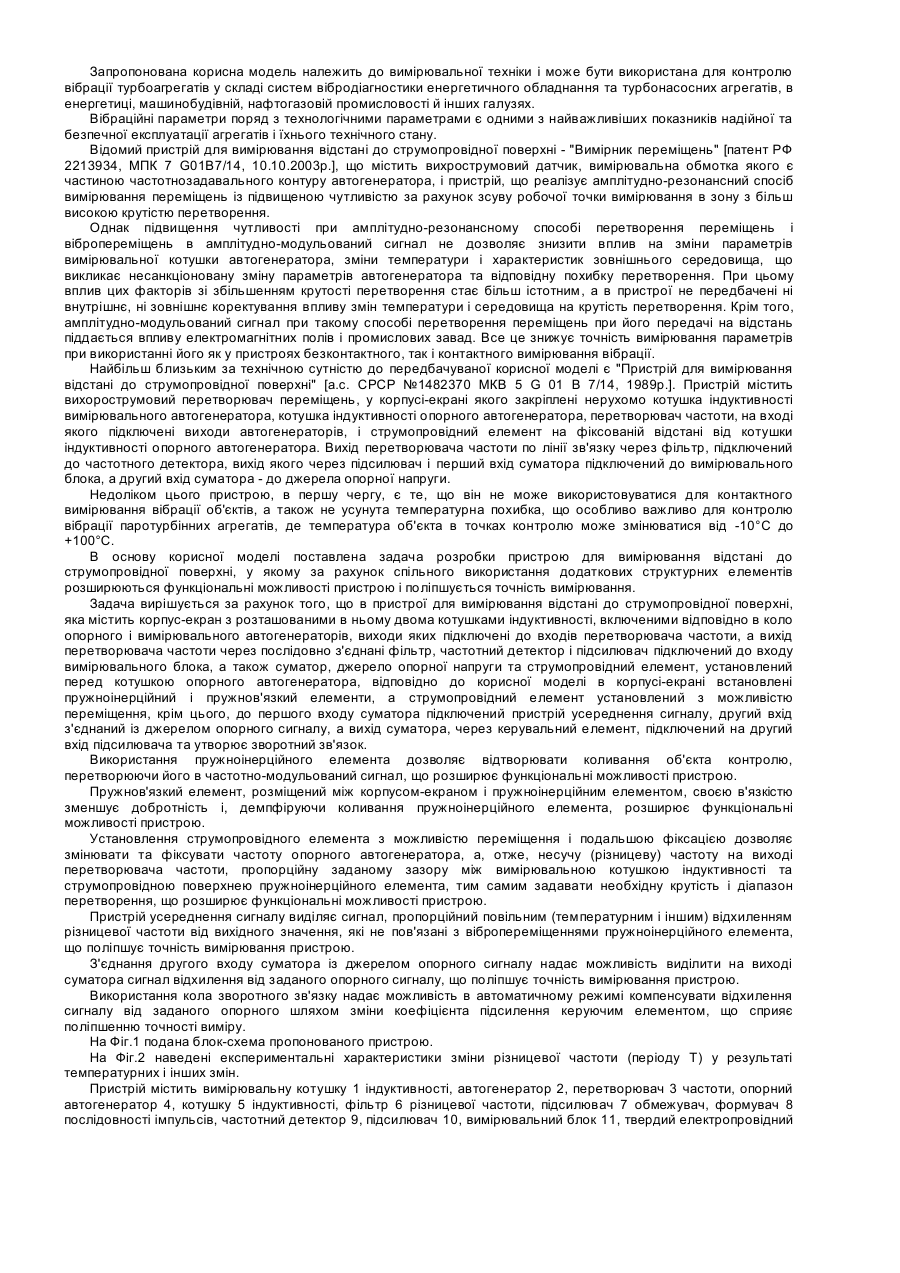
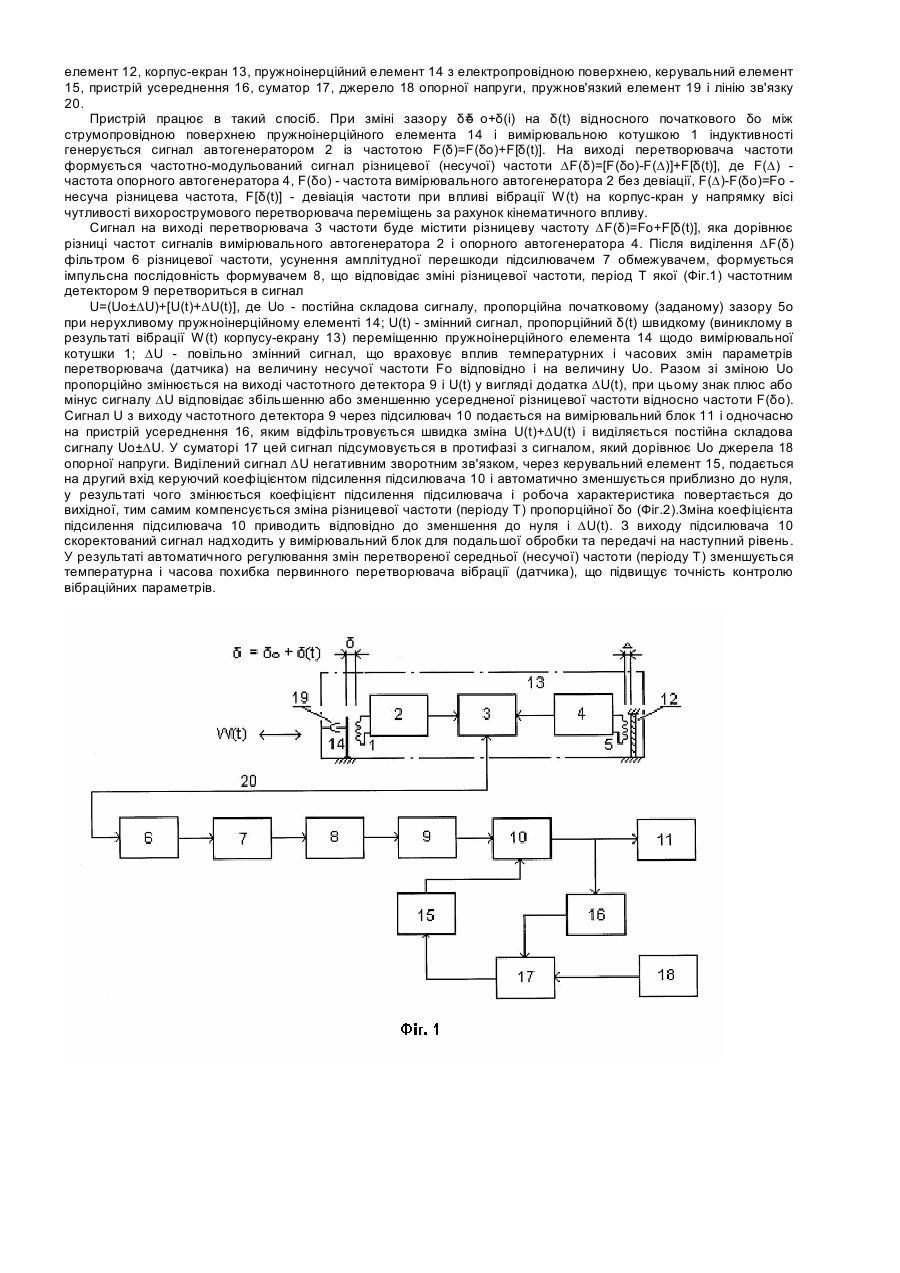
Запропонована корисна модель належить до вимірювальної техніки і може бути використана для контролю вібрації турбоагрегатів у складі систем вібродіагностики енергетичного обладнання та турбонасосних агрегатів, в енергетиці, машинобудівній, нафтогазовій промисловості й інших галузях. Вібраційні параметри поряд з технологічними параметрами є одними з найважливіших показників надійної та безпечної експлуатації агрегатів і їхнього технічного стану. Відомий пристрій для вимірювання відстані до струмопровідної поверхні - "Вимірник переміщень" [патент РФ 2213934, МПК 7 G01B7/14, 10.10.2003p.], що містить вихрострумовий датчик, вимірювальна обмотка якого є частиною частотнозадавального контуру автогенератора, і пристрій, що реалізує амплітудно-резонансний спосіб вимірювання переміщень із підвищеною чутливістю за рахунок зсуву робочої точки вимірювання в зону з більш високою крутістю перетворення. Однак підвищення чутливості при амплітудно-резонансному способі перетворення переміщень і вібропереміщень в амплітудно-модульований сигнал не дозволяє знизити вплив на зміни параметрів вимірювальної котушки автогенератора, зміни температури і характеристик зовнішнього середовища, що викликає несанкціоновану зміну параметрів автогенератора та відповідну похибку перетворення. При цьому вплив цих факторів зі збільшенням крутості перетворення стає більш істотним, а в пристрої не передбачені ні внутрішнє, ні зовнішнє коректування впливу змін температури і середовища на крутість перетворення. Крім того, амплітудно-модульований сигнал при такому способі перетворення переміщень при його передачі на відстань піддається впливу електромагнітних полів і промислових завад. Все це знижує точність вимірювання параметрів при використанні його як у пристроях безконтактного, так і контактного вимірювання вібрації. Найбільш близьким за технічною сутністю до передбачуваної корисної моделі є "Пристрій для вимірювання відстані до струмопровідної поверхні" [а.с. СРСР №1482370 МКВ 5 G 01 В 7/14, 1989р.]. Пристрій містить вихорострумовий перетворювач переміщень, у корпусі-екрані якого закріплені нерухомо котушка індуктивності вимірювального автогенератора, котушка індуктивності опорного автогенератора, перетворювач частоти, на вході якого підключені виходи автогенераторів, і струмопровідний елемент на фіксованій відстані від котушки індуктивності опорного автогенератора. Вихід перетворювача частоти по лінії зв'язку через фільтр, підключений до частотного детектора, вихід якого через підсилювач і перший вхід суматора підключений до вимірювального блока, а другий вхід суматора - до джерела опорної напруги. Недоліком цього пристрою, в першу чергу, є те, що він не може використовуватися для контактного вимірювання вібрації об'єктів, а також не усунута температурна похибка, що особливо важливо для контролю вібрації паротурбінних агрегатів, де температура об'єкта в точках контролю може змінюватися від -10°С до +100°С. В основу корисної моделі поставлена задача розробки пристрою для вимірювання відстані до струмопровідної поверхні, у якому за рахунок спільного використання додаткових структурних елементів розширюються функціональні можливості пристрою і поліпшується точність вимірювання. Задача вирішується за рахунок того, що в пристрої для вимірювання відстані до струмопровідної поверхні, яка містить корпус-екран з розташованими в ньому двома котушками індуктивності, включеними відповідно в коло опорного і вимірювального автогенераторів, виходи яких підключені до входів перетворювача частоти, а вихід перетворювача частоти через послідовно з'єднані фільтр, частотний детектор і підсилювач підключений до входу вимірювального блока, а також суматор, джерело опорної напруги та струмопровідний елемент, установлений перед котушкою опорного автогенератора, відповідно до корисної моделі в корпусі-екрані встановлені пружноінерційний і пружнов'язкий елементи, а струмопровідний елемент установлений з можливістю переміщення, крім цього, до першого входу суматора підключений пристрій усереднення сигналу, другий вхід з'єднаний із джерелом опорного сигналу, а вихід суматора, через керувальний елемент, підключений на другий вхід підсилювача та утворює зворотний зв'язок. Використання пружноінерційного елемента дозволяє відтворювати коливання об'єкта контролю, перетворюючи його в частотно-модульований сигнал, що розширює функціональні можливості пристрою. Пружнов'язкий елемент, розміщений між корпусом-екраном і пружноінерційним елементом, своєю в'язкістю зменшує добротність і, демпфіруючи коливання пружноінерційного елемента, розширює функціональні можливості пристрою. Установлення струмопровідного елемента з можливістю переміщення і подальшою фіксацією дозволяє змінювати та фіксувати частоту опорного автогенератора, а, отже, несучу (різницеву) частоту на виході перетворювача частоти, пропорційну заданому зазору між вимірювальною котушкою індуктивності та струмопровідною поверхнею пружноінерційного елемента, тим самим задавати необхідну крутість і діапазон перетворення, що розширює функціональні можливості пристрою. Пристрій усереднення сигналу виділяє сигнал, пропорційний повільним (температурним і іншим) відхиленням різницевої частоти від вихідного значення, які не пов'язані з вібропереміщеннями пружноінерційного елемента, що поліпшує точність вимірювання пристрою. З'єднання другого входу суматора із джерелом опорного сигналу надає можливість виділити на виході суматора сигнал відхилення від заданого опорного сигналу, що поліпшує точність вимірювання пристрою. Використання кола зворотного зв'язку надає можливість в автоматичному режимі компенсувати відхилення сигналу від заданого опорного шляхом зміни коефіцієнта підсилення керуючим елементом, що сприяє поліпшенню точності виміру. На Фіг.1 подана блок-схема пропонованого пристрою. На Фіг.2 наведені експериментальні характеристики зміни різницевої частоти (періоду Т) у результаті температурних і інших змін. Пристрій містить вимірювальну котушку 1 індуктивності, автогенератор 2, перетворювач 3 частоти, опорний автогенератор 4, котушку 5 індуктивності, фільтр 6 різницевої частоти, підсилювач 7 обмежувач, формувач 8 послідовності імпульсів, частотний детектор 9, підсилювач 10, вимірювальний блок 11, твердий електропровідний елемент 12, корпус-екран 13, пружноінерційний елемент 14 з електропровідною поверхнею, керувальний елемент 15, пристрій усереднення 16, суматор 17, джерело 18 опорної напруги, пружнов'язкий елемент 19 і лінію зв'язку 20. Пристрій працює в такий спосіб. При зміні зазору δ=δ o+δ(і) на δ(t) відносного початкового δo між струмопровідною поверхнею пружноінерційного елемента 14 і вимірювальною котушкою 1 індуктивності генерується сигнал автогенератором 2 із частотою F(δ)=F(δo)+F[δ(t)]. На виході перетворювача частоти формується частотно-модульований сигнал різницевої (несучої) частоти ∆F(δ)=[F(δo)-F(∆)]+F[δ(t)], де F(∆) частота опорного автогенератора 4, F(δo) - частота вимірювального автогенератора 2 без девіації, F(∆)-F(δo)=Fo несуча різницева частота, F[δ(t)] - девіація частоти при впливі вібрації W(t) на корпус-кран у напрямку вісі чутливості вихорострумового перетворювача переміщень за рахунок кінематичного впливу. Сигнал на виході перетворювача 3 частоти буде містити різницеву частоту ∆F(δ)=Fo+F[δ(t)], яка дорівнює різниці частот сигналів вимірювального автогенератора 2 і опорного автогенератора 4. Після виділення ∆F(δ) фільтром 6 різницевої частоти, усунення амплітудної перешкоди підсилювачем 7 обмежувачем, формується імпульсна послідовність формувачем 8, що відповідає зміні різницевої частоти, період Т якої (Фіг.1) частотним детектором 9 перетвориться в сигнал U=(Uo±∆U)+[U(t)+∆U(t)], де Uo - постійна складова сигналу, пропорційна початковому (заданому) зазору 5о при нерухливому пружноінерційному елементі 14; U(t) - змінний сигнал, пропорційний δ(t) швидкому (виниклому в результаті вібрації W(t) корпусу-екрану 13) переміщенню пружноінерційного елемента 14 щодо вимірювальної котушки 1; ∆U - повільно змінний сигнал, що враховує вплив температурних і часових змін параметрів перетворювача (датчика) на величину несучої частоти Fo відповідно і на величину Uo. Разом зі зміною Uo пропорційно змінюється на виході частотного детектора 9 і U(t) у вигляді додатка ∆U(t), при цьому знак плюс або мінус сигналу ∆U відповідає збільшенню або зменшенню усередненої різницевої частоти відносно частоти F(δo). Сигнал U з виходу частотного детектора 9 через підсилювач 10 подається на вимірювальний блок 11 і одночасно на пристрій усереднення 16, яким відфільтровується швидка зміна U(t)+∆U(t) і виділяється постійна складова сигналу Uo±∆U. У суматорі 17 цей сигнал підсумовується в протифазі з сигналом, який дорівнює Uo джерела 18 опорної напруги. Виділений сигнал ∆U негативним зворотним зв'язком, через керувальний елемент 15, подається на другий вхід керуючий коефіцієнтом підсилення підсилювача 10 і автоматично зменшується приблизно до нуля, у результаті чого змінюється коефіцієнт підсилення підсилювача і робоча характеристика повертається до вихідної, тим самим компенсується зміна різницевої частоти (періоду Т) пропорційної δo (Фіг.2).Зміна коефіцієнта підсилення підсилювача 10 приводить відповідно до зменшення до нуля і ∆U(t). З виходу підсилювача 10 скоректований сигнал надходить у вимірювальний блок для подальшої обробки та передачі на наступний рівень. У результаті автоматичного регулювання змін перетвореної середньої (несучої) частоти (періоду Т) зменшується температурна і часова похибка первинного перетворювача вібрації (датчика), що підвищує точність контролю вібраційних параметрів.
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for measurement of distance to current-conductive surface
Автори англійськоюTsybulko Vadym Yosypovych, Meteliov Leonid Dmytrovych, Shulzhenko Mykola Hryhorovych, Hurov Yurii Nykyforovych, Chuhreiev Anatolii Ivanovych, Yefremov Yurii Hennadiiovych, Deparma Oleksandr Vadymovych
Назва патенту російськоюУстройство для измерения расстояния до токопроводящей поверхности
Автори російськоюЦибулько Вадим Иосифович, Метелев Леонид Дмитриевич, Шульженко Николай Григорьевич, Гуров Юрий Никифорович, Чугреев Анатолий Иванович, Ефремов Юрий Геннадиевич, Депарма Александр Вадимович
МПК / Мітки
МПК: G01B 7/14
Мітки: відстані, пристрій, струмопровідної, поверхні, вимірювання
Код посилання
<a href="https://ua.patents.su/3-31940-pristrijj-dlya-vimiryuvannya-vidstani-do-strumoprovidno-poverkhni.html" target="_blank" rel="follow" title="База патентів України">Пристрій для вимірювання відстані до струмопровідної поверхні</a>
Пристрій для вимірювання відстані за допомогою ультразвуку
Номер патенту: 71221
Опубліковано: 15.11.2004
Автори: Таран Олександр Миколайович, Кулік Анатолій Степанович, Нарожний Віталій Васильович, Пунегов Станіслав Юрійович, Лавошник Ірина Володимирівна
МПК: G01S 7/52, G01S 15/00
Мітки: відстані, допомогою, вимірювання, ультразвуку, пристрій
Формула / Реферат:
Пристрій для вимірювання відстані за допомогою ультразвуку, що містить передавач і приймач, що виконані у вигляді єдиного ультразвукового перетворювача, який з'єднано з пристроєм обробки сигналів, котрий містить граничний перемикач порогів із змінюваним порогом перемикання, вихід якого послідовно приєднано до входу аналого-цифрового перетворювача, вихід якого в свою чергу з'єднано зі входом мікрокомп'ютера, який відрізняється тим, що до нього...
Спосіб ультразвукового локаційного вимірювання відстані і пристрій для його реалізації
Номер патенту: 39336
Опубліковано: 15.06.2001
Автори: Гнітецька Тетяна Віталіївна, Гнітецький Віталій Анатолійович
МПК: G01F 23/28, G01F 23/296
Мітки: реалізації, ультразвукового, відстані, пристрій, спосіб, вимірювання, локаційного
Формула / Реферат:
1. Спосіб ультразвукового локаційного вимірювання відстані, що включає випромінення і прийом ультразвукових зондуючих імпульсів, підсилення прийнятих імпульсів, формування вимірюваного інтервалу, формування підрахункових імпульсів, цифрове перетворення вимірюваного інтервалу за допомогою підрахункових імпульсів, усереднення і цифрову індикацію віддалі від акустичного датчика до вимірюваного рівня, який відрізняється тим, що формування...
Спосіб контролю положення волокна та пристрій для вимірювання відстані до поверхні волокна
Номер патенту: 32584
Опубліковано: 15.02.2001
Автори: Етвуд Томас Джозеф, Редінг Брюс Воррен, Пастел Дейвід Ендрю
МПК: G01B 11/00, G01B 9/00
Мітки: поверхні, контролю, положення, спосіб, волокна, вимірювання, пристрій, відстані
Текст:
...относится к способам и к устройству для измерения расстояния до объекта или части его поверхности В европейском патенте 608 538, являющимся прототипом предлагаемого изобретения, раскрыто использование спектра пространственных частот (при контроле - прим перев) волокна В этой патентной публикации решается проблема контроля толщины герметичных, например, углеродных покрытий, наносимых на волокна в процессе вытяжки для снижения воздействия...
Фазовий спосіб вимірювання відстані до нерухомого предмета і пристрій для його здійснення
Номер патенту: 21472
Опубліковано: 16.12.1997
Автори: Ментковський Юзеф Леонович, Кондратов Владислав Тимофійович, Скрипник Юрій Олексійович, Головко Дмитро Богданович, Дубровний Віктор Опанасович
МПК: G01C 3/08
Мітки: вимірювання, пристрій, фазовий, здійснення, відстані, нерухомого, предмета, спосіб
Формула / Реферат:
1. Фазовий спосіб вимірювання відстані до нерухомого предмета, який полягає у створенні зондуючого променя з двох оптичних когерентних випромінювань, близьких за частотою, опроміненні контрольованого предмета зондуючим променем, прийомі відбитого променя, його фотоелектричному перетворенні, виділенні електричного сигналу різницевої частоти, вимірюванні різниці фаз електричних сигналів і визначенні відстані за аналітичним співвідношенням,...
Датчик пристрою для вимірювання рівня струмопровідної рідини
Номер патенту: 21577
Опубліковано: 06.01.1998
Автори: СТЕЦКО МИХАЙЛО ГРИГОРОВИЧ, Шовкопляс Іван Петрович
МПК: G01F 23/24
Мітки: рівня, датчик, струмопровідної, пристрою, рідини, вимірювання
Формула / Реферат:
Датчик пристрою для вимірювання рівня струмопровідної рідини, який складається з оболонки, фільтруючого елементу, електрода, приєднувального фланця і який відрізняється тим, що частина площі зовнішньої поверхні фільтруючого елементу знаходиться в оболонці із струмопровідного матеріалу.
Попередній патент: Фторований нанокомпозит з підвищеною деформаційною міцністю
Наступний патент: Спосіб створення дисконтної системи
Випадковий патент: Пристрій для контролю металевих включень в діелектричні матеріали