Спосіб безконтактного визначення просторового положення вантажної підвіски спеціального мостового крана кругової дії
Формула / Реферат
1. Спосіб безконтактного визначення просторового положення вантажної підвіски спеціального мостового крана кругової дії, згідно з яким визначення відбувається із застосуванням світловіддалемірів, який відрізняється тим, що як світловіддалеміри застосовують лазерні далекоміри, а положення вантажної підвіски мостового крана кругової дії визначають розрахунково-керуючим контролером через вимірювання та введення в контролер трьох складових просторової координати підвіски, а саме, кута повороту моста крана відносно своєї вертикальної осі, який вимірюють лазерними датчиками, встановленими уздовж окружності підкранової монорейки; відстані від проекції центра вантажної вилки на площину обертання моста крана до центра моста, яку вимірюють лазерним датчиком, встановленим на краю кранового моста у напрямі ходу мостового візка; висоти підйому центра вантажної вилки відносно її нульової відмітки, яку вимірюють лазерним датчиком, встановленим за ходом вантажної підвіски у вертикальному напрямі.
2. Спосіб за п. 1, який відрізняється тим, що уздовж окружності підкранової монорейки встановлені 6 лазерних датчиків.
3. Спосіб за п. 2, який відрізняється тим, що 6 лазерних датчиків уздовж окружності підкранової монорейки встановлені з інтервалом 60°.
4. Спосіб за п. 1, який відрізняється тим, що у розрахунково-керуючому контролері встановлена програма, що забезпечує недопущення входу вантажної підвіски крана у заборонену зону, наприклад у зону реактора або у зону басейну витримки.
Текст
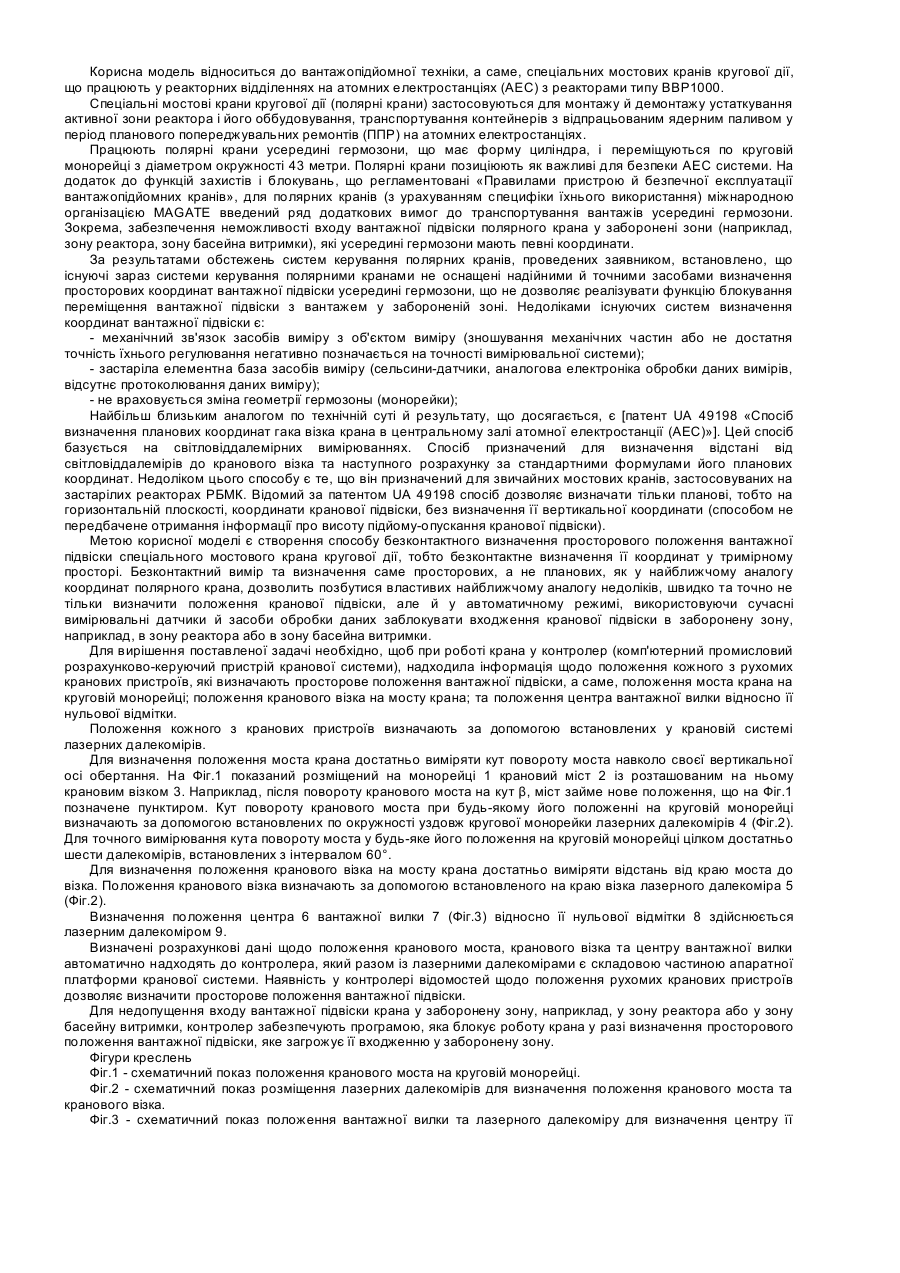
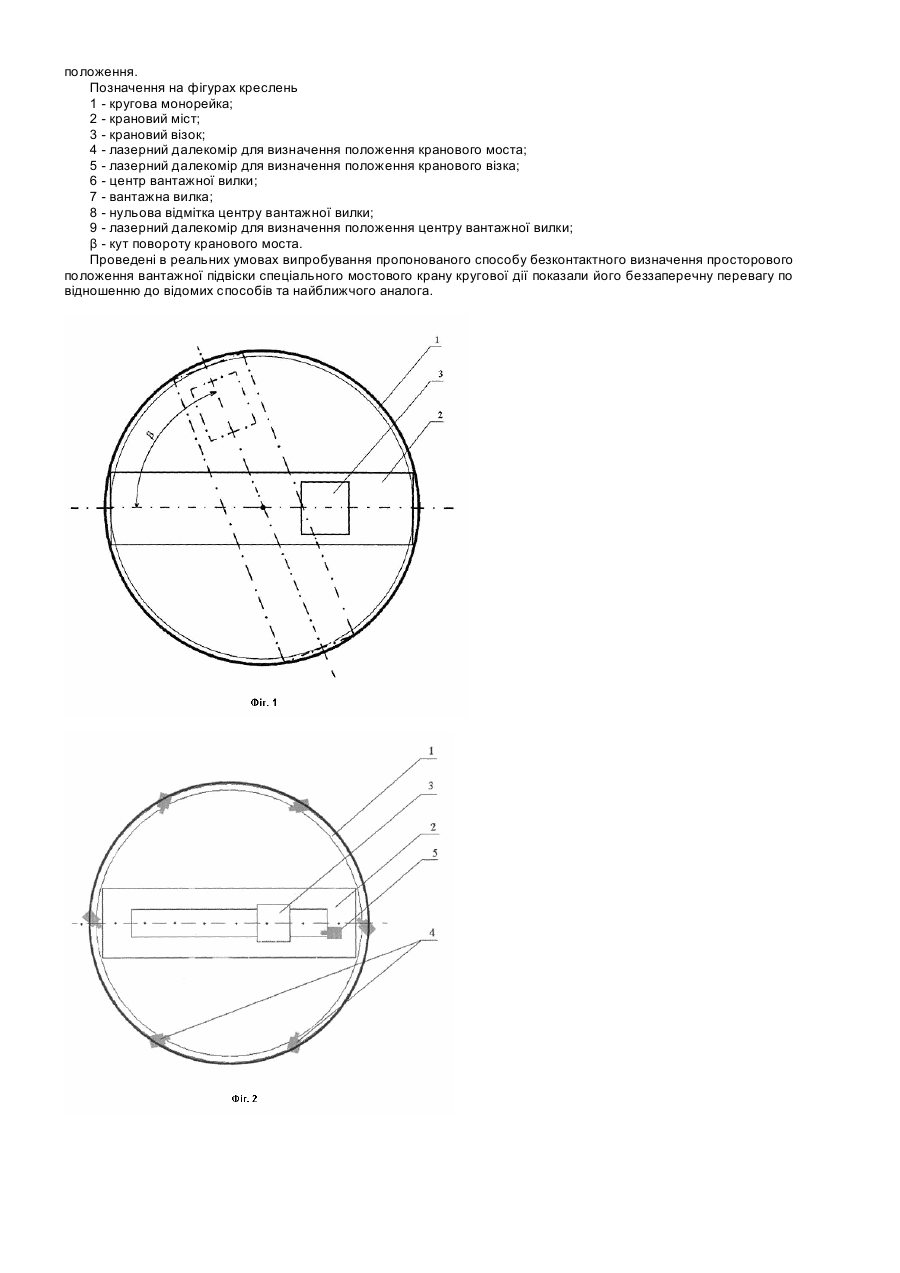
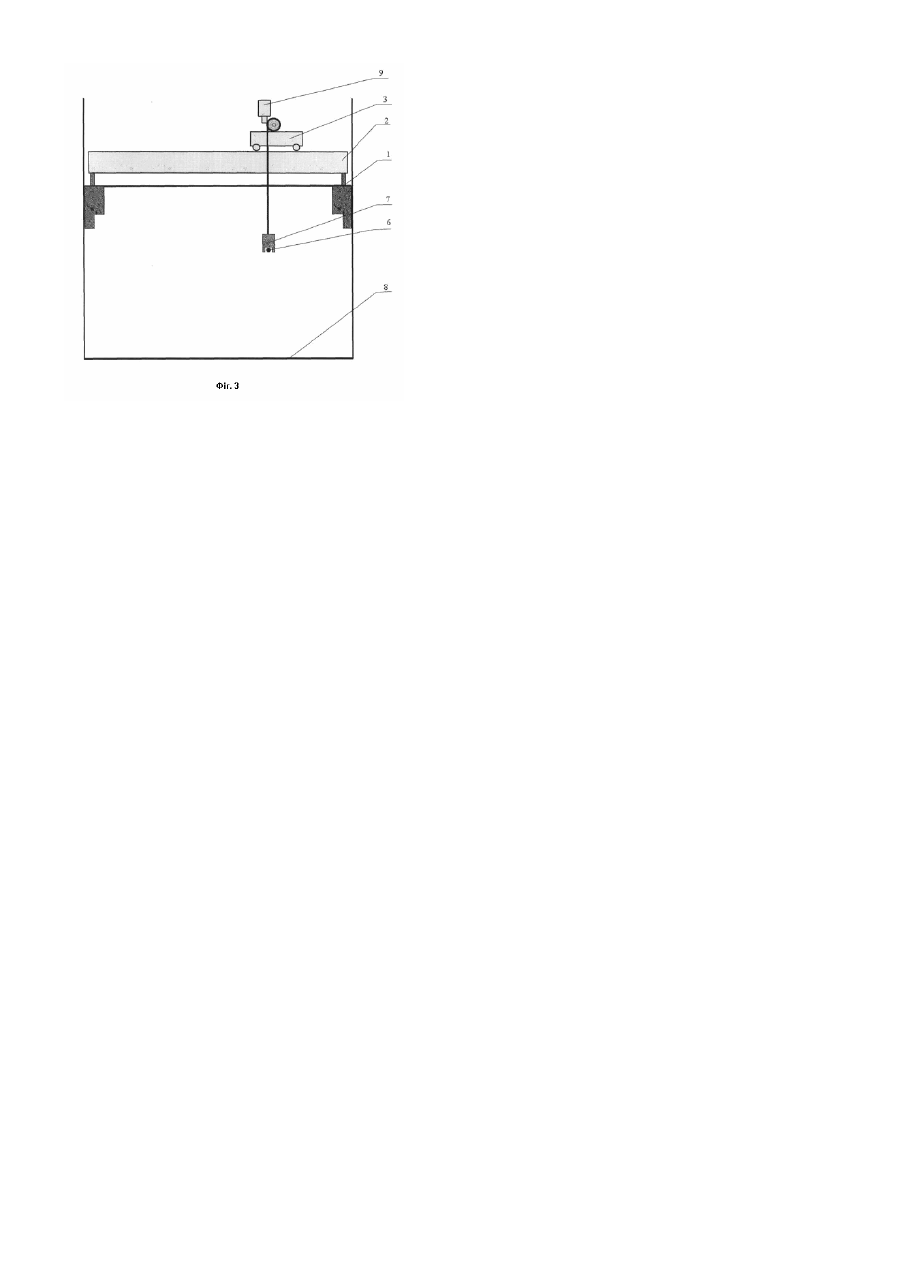
Корисна модель відноситься до вантажопідйомної техніки, а саме, спеціальних мостових кранів кругової дії, що працюють у реакторних відділеннях на атомних електростанціях (АЕС) з реакторами типу ВВР1000. Спеціальні мостові крани кругової дії (полярні крани) застосовуються для монтажу й демонтажу устаткування активної зони реактора і його оббудовування, транспортування контейнерів з відпрацьованим ядерним паливом у період планового попереджувальних ремонтів (ППР) на атомних електростанціях. Працюють полярні крани усередині гермозони, що має форму циліндра, і переміщуються по круговій монорейці з діаметром окружності 43 метри. Полярні крани позиціюють як важливі для безпеки АЕС системи. На додаток до функцій захистів і блокувань, що регламентовані «Правилами пристрою й безпечної експлуатації вантажопідйомних кранів», для полярних кранів (з урахуванням специфіки їхнього використання) міжнародною організацією MAGATE введений ряд додаткових вимог до транспортування вантажів усередині гермозони. Зокрема, забезпечення неможливості входу вантажної підвіски полярного крана у заборонені зони (наприклад, зону реактора, зону басейна витримки), які усередині гермозони мають певні координати. За результатами обстежень систем керування полярних кранів, проведених заявником, встановлено, що існуючі зараз системи керування полярними кранами не оснащені надійними й точними засобами визначення просторових координат вантажної підвіски усередині гермозони, що не дозволяє реалізувати функцію блокування переміщення вантажної підвіски з вантажем у забороненій зоні. Недоліками існуючих систем визначення координат вантажної підвіски є: - механічний зв'язок засобів виміру з об'єктом виміру (зношування механічних частин або не достатня точність їхнього регулювання негативно позначається на точності вимірювальної системи); - застаріла елементна база засобів виміру (сельсини-датчики, аналогова електроніка обробки даних вимірів, відсутнє протоколювання даних виміру); - не враховується зміна геометрії гермозоны (монорейки); Найбільш близьким аналогом по технічній суті й результату, що досягається, є [патент UA 49198 «Спосіб визначення планових координат гака візка крана в центральному залі атомної електростанції (АЕС)»]. Цей спосіб базується на світловіддалемірних вимірюваннях. Спосіб призначений для визначення відстані від світловіддалемірів до кранового візка та наступного розрахунку за стандартними формулами його планових координат. Недоліком цього способу є те, що він призначений для звичайних мостових кранів, застосовуваних на застарілих реакторах РБМК. Відомий за патентом UA 49198 спосіб дозволяє визначати тільки планові, тобто на горизонтальній плоскості, координати кранової підвіски, без визначення її вертикальної координати (способом не передбачене отримання інформації про висоту підйому-опускання кранової підвіски). Метою корисної моделі є створення способу безконтактного визначення просторового положення вантажної підвіски спеціального мостового крана кругової дії, тобто безконтактне визначення її координат у тримірному просторі. Безконтактний вимір та визначення саме просторових, а не планових, як у найближчому аналогу координат полярного крана, дозволить позбутися властивих найближчому аналогу недоліків, швидко та точно не тільки визначити положення кранової підвіски, але й у автоматичному режимі, використовуючи сучасні вимірювальні датчики й засоби обробки даних заблокувати входження кранової підвіски в заборонену зону, наприклад, в зону реактора або в зону басейна витримки. Для вирішення поставленої задачі необхідно, щоб при роботі крана у контролер (комп'ютерний промисловий розрахунково-керуючий пристрій кранової системи), надходила інформація щодо положення кожного з рухомих кранових пристроїв, які визначають просторове положення вантажної підвіски, а саме, положення моста крана на круговій монорейці; положення кранового візка на мосту крана; та положення центра вантажної вилки відносно її нульової відмітки. Положення кожного з кранових пристроїв визначають за допомогою встановлених у крановій системі лазерних далекомірів. Для визначення положення моста крана достатньо виміряти кут повороту моста навколо своєї вертикальної осі обертання. На Фіг.1 показаний розміщений на монорейці 1 крановий міст 2 із розташованим на ньому крановим візком 3. Наприклад, після повороту кранового моста на кут β, міст займе нове положення, що на Фіг.1 позначене пунктиром. Кут повороту кранового моста при будь-якому його положенні на круговій монорейці визначають за допомогою встановлених по окружності уздовж кругової монорейки лазерних далекомірів 4 (Фіг.2). Для точного вимірювання кута повороту моста у будь-яке його положення на круговій монорейці цілком достатньо шести далекомірів, встановлених з інтервалом 60°. Для визначення положення кранового візка на мосту крана достатньо виміряти відстань від краю моста до візка. Положення кранового візка визначають за допомогою встановленого на краю візка лазерного далекоміра 5 (Фіг.2). Визначення положення центра 6 вантажної вилки 7 (Фіг.3) відносно її нульової відмітки 8 здійснюється лазерним далекоміром 9. Визначені розрахункові дані щодо положення кранового моста, кранового візка та центру вантажної вилки автоматично надходять до контролера, який разом із лазерними далекомірами є складовою частиною апаратної платформи кранової системи. Наявність у контролері відомостей щодо положення рухомих кранових пристроїв дозволяє визначити просторове положення вантажної підвіски. Для недопущення входу вантажної підвіски крана у заборонену зону, наприклад, у зону реактора або у зону басейну витримки, контролер забезпечують програмою, яка блокує роботу крана у разі визначення просторового положення вантажної підвіски, яке загрожує її входженню у заборонену зону. Фігури креслень Фіг.1 - схематичний показ положення кранового моста на круговій монорейці. Фіг.2 - схематичний показ розміщення лазерних далекомірів для визначення положення кранового моста та кранового візка. Фіг.3 - схематичний показ положення вантажної вилки та лазерного далекоміру для визначення центру її положення. Позначення на фігурах креслень 1 - кругова монорейка; 2 - крановий міст; 3 - крановий візок; 4 - лазерний далекомір для визначення положення кранового моста; 5 - лазерний далекомір для визначення положення кранового візка; 6 - центр вантажної вилки; 7 - вантажна вилка; 8 - нульова відмітка центру вантажної вилки; 9 - лазерний далекомір для визначення положення центру вантажної вилки; β - кут повороту кранового моста. Проведені в реальних умовах випробування пропонованого способу безконтактного визначення просторового положення вантажної підвіски спеціального мостового крану кругової дії показали його беззаперечну перевагу по відношенню до відомих способів та найближчого аналога.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of noncontact determination of attitude position of cargo suspension of special bridge crane of circular action
Автори англійськоюKRUGER GEORG WERNER
Назва патенту російськоюСпособ бесконтактного определения пространственного положения грузовой подвески специального мостового крана кругового действия
Автори російськоюКрюгер Георг Вернер
МПК / Мітки
МПК: B66C 17/00
Мітки: безконтактного, підвіски, спосіб, дії, крана, спеціального, визначення, положення, мостового, просторового, вантажної, кругової
Код посилання
<a href="https://ua.patents.su/3-31970-sposib-bezkontaktnogo-viznachennya-prostorovogo-polozhennya-vantazhno-pidviski-specialnogo-mostovogo-krana-krugovo-di.html" target="_blank" rel="follow" title="База патентів України">Спосіб безконтактного визначення просторового положення вантажної підвіски спеціального мостового крана кругової дії</a>
Пристрій для гасіння коливань вантажної підвіски крана
Номер патенту: 71692
Опубліковано: 15.12.2004
Автори: Воскобойников Геннадій Миколайович, Наконечна Валентина Іванівна, Столенко Петро Федорович, Підгорний Іван Дмитрийович
МПК: B66C 1/22
Мітки: вантажної, гасіння, підвіски, пристрій, коливань, крана
Формула / Реферат:
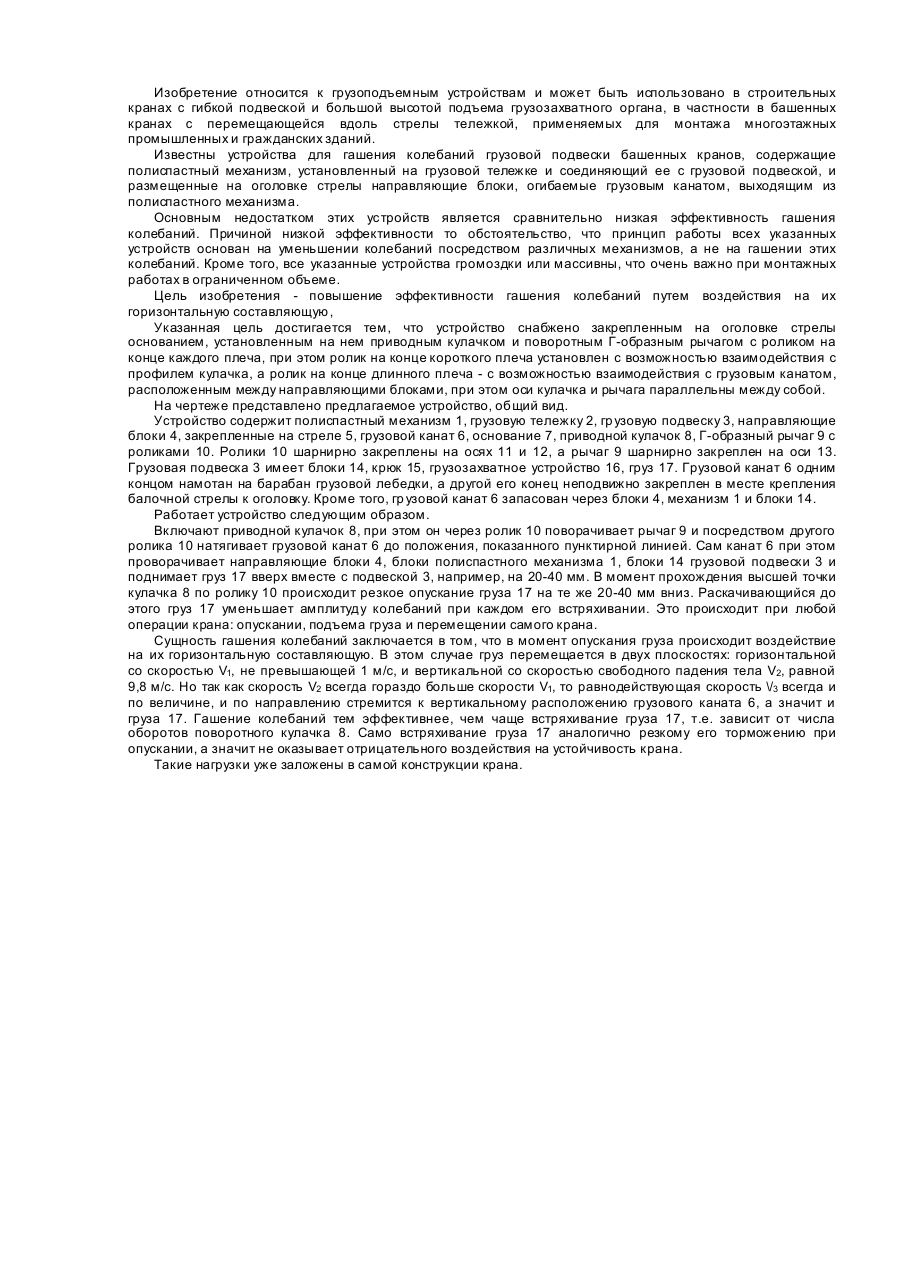
(57) Устройство для гашения колебаний грузовой подвески крана, содержащее полиспастный механизм, установленный на грузовой тележке и соединяющий ее с грузовой подвеской, и размещенные на оголовке стрелы направляющие блоки, огибаемые грузовым канатом, выходящим из полиспастного механизма, отличающееся тем, что, с целью повышения эффективности гашения колебаний путем воздействия на их горизонтальную составляющую, оно снабжено закрепленным на...
Вимикач підвіски крана
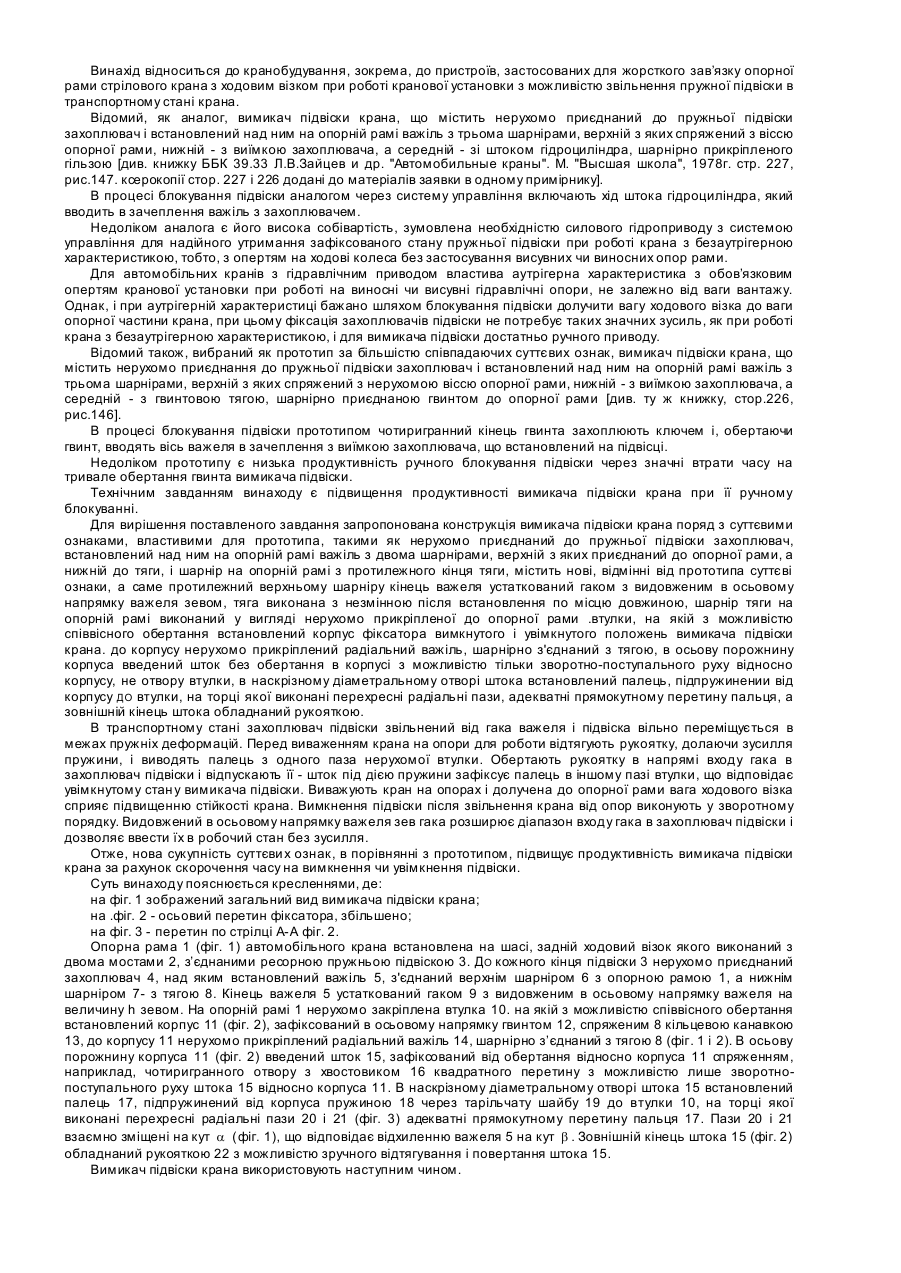
Номер патенту: 78700
Опубліковано: 25.04.2007
Автор: Швідлер Олександр Петрович
МПК: B66C 13/18
Мітки: крана, вимикач, підвіски
Формула / Реферат:
Вимикач підвіски крана, що містить нерухомо приєднаний до підвіски захоплювач, встановлений над ним на опорній рамі важіль з двома шарнірами, верхній з яких приєднаний до опорної рами, а нижній до тяги, і шарнір на опорній рамі з протилежного кінця тяги, який відрізняється тим, що кінець важеля устаткований гаком з видовженим в осьовому напрямку важеля зівом, шарнір тяги на опорній рамі виконаний у вигляді нерухомо прикріпленої до опорної...
Вимикач підвіски крана
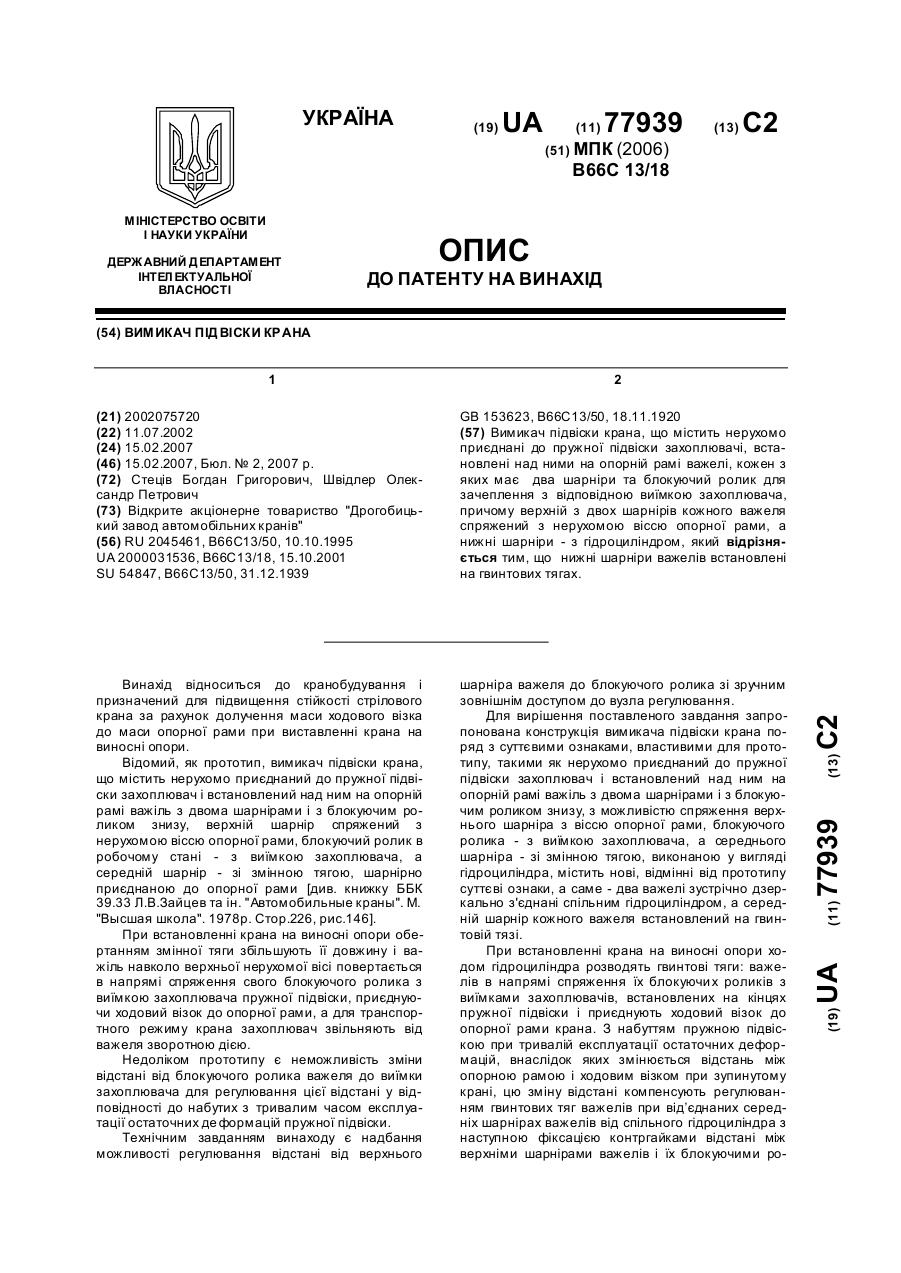
Номер патенту: 77939
Опубліковано: 15.02.2007
Автори: Стеців Богдан Григорович, Швідлер Олександр Петрович
МПК: B66C 13/18
Мітки: підвіски, крана, вимикач
Формула / Реферат:
Вимикач підвіски крана, що містить нерухомо приєднані до пружної підвіски захоплювачі, встановлені над ними на опорній рамі важелі, кожен з яких має два шарніри та блокуючий ролик для зачеплення з відповідною виїмкою захоплювача, причому верхній з двох шарнірів кожного важеля спряжений з нерухомою віссю опорної рами, а нижні шарніри - з гідроциліндром, який відрізняється тим, що нижні шарніри важелів встановлені на гвинтових тягах.
Прилад для визначення просторового положення звару
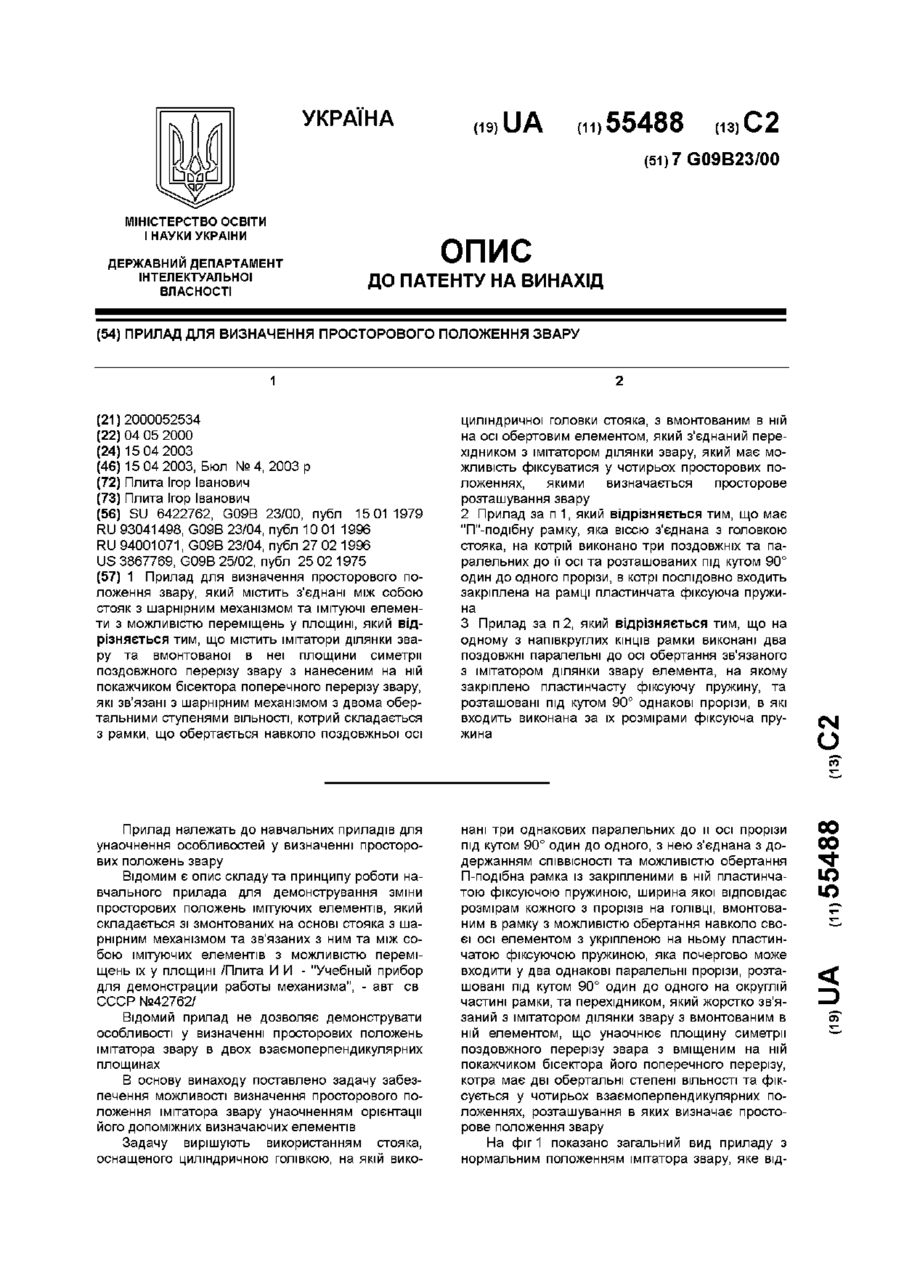
Номер патенту: 55488
Опубліковано: 15.04.2003
Автор: Плита Ігор Іванович
МПК: G09B 23/00
Мітки: положення, визначення, звару, просторового, прилад
Формула / Реферат:
1. Прилад для визначення просторового положення звару, який містить з'єднані між собою стояк з шарнірним механізмом та імітуючі елементи з можливістю переміщень у площині, який відрізняється тим, що містить імітатори ділянки звару та вмонтованої в неї площини симетрії поздовжного перерізу звару з нанесеним на ній покажчиком бісектора поперечного перерізу звару, які зв’язані з шарнірним механізмом з двома обертальними ступенями вільності,...
Пристрій для керування електроживленням крана мостового типу, наприклад перевантажувача
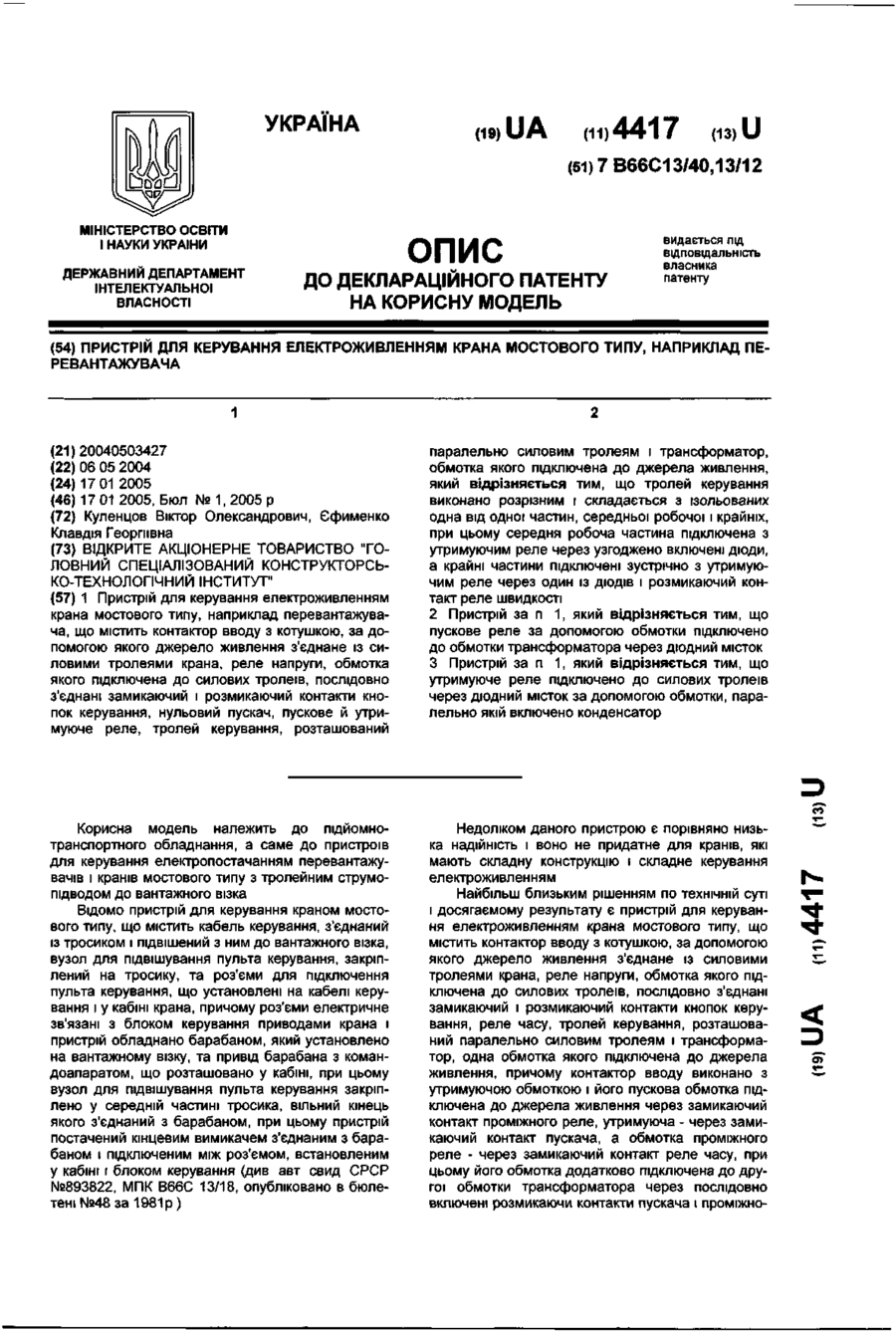
Номер патенту: 4417
Опубліковано: 17.01.2005
Автори: Єфименко Клавдія Георгіївна, Куленцов Віктор Олександрович
МПК: B66C 13/00, B66C 13/18
Мітки: крана, електроживленням, мостового, типу, пристрій, наприклад, керування, перевантажувача
Формула / Реферат:
1. Пристрій для керування електроживленням крана мостового типу, наприклад перевантажувача, що містить контактор вводу з котушкою, за допомогою якого джерело живлення з'єднане із силовими тролеями крана, реле напруги, обмотка якого підключена до силових тролеїв, послідовно з'єднані замикаючий і розмикаючий контакти кнопок керування, нульовий пускач, пускове й утримуюче реле, тролей керування, розташований паралельно силовим тролеям і...
Попередній патент: Спосіб визначення системи оцінки придатності ґрунтів для проведення меліоративної плантажної оранки
Наступний патент: Спосіб електротермічної переробки відходів у метанол
Випадковий патент: Пристрій для видалення картриджа