Спосіб цифрового керування електроприводом постійного струму головних електроприводів прокатних станів
Номер патенту: 32089
Опубліковано: 12.05.2008
Автори: Цвітнов Віталій Олександрович, Файнштейн Вілен Григорович
Формула / Реферат
Спосіб цифрового керування електроприводом постійного струму головних електроприводів прокатних станів, що містить обчислювальний пристрій, що забезпечує регулювання струму й швидкості обертання якоря двигуна шляхом обчислення затримки включення чергового тиристора відносно початку наступного інтервалу перетворення, цифровий пристрій керування уведенням (виводом) інформації в (з) обчислювального пристрою, який відрізняється тим, що визначення середнього значення струму якоря за інтервал перетворення виконується в тому ж інтервалі, де реалізується кут керування, шляхом виміру миттєвого значення струму якоря на початку інтервалу перетворення й у момент часу t, що розраховується обчислювальним пристроєм на початку кожного інтервалу перетворення по наближеній формулі, що описує залежність часу виміру, відлічуваного від початку інтервалу перетворення пристроєм керування, від величини затримки включення тиристора на даному інтервалі відносно початку інтервалу - tz, наприклад, шляхом заміни кривої поліномом другого ступеня, де коефіцієнти полінома залежать від величини струму на початку інтервалу перетворення, причому, якщо раніше обчислене граничне значення часу виміру струму - td визначалось по наближеній формулі, що зв'язує td зі струмом на початку інтервалу перетворення, менше або дорівнює величині затримки включення чергового тиристора на даному інтервалі tz, то величина t відраховується від початку інтервалу перетворення, у противному випадку t відраховується від моменту включення чергового тиристора.
Текст
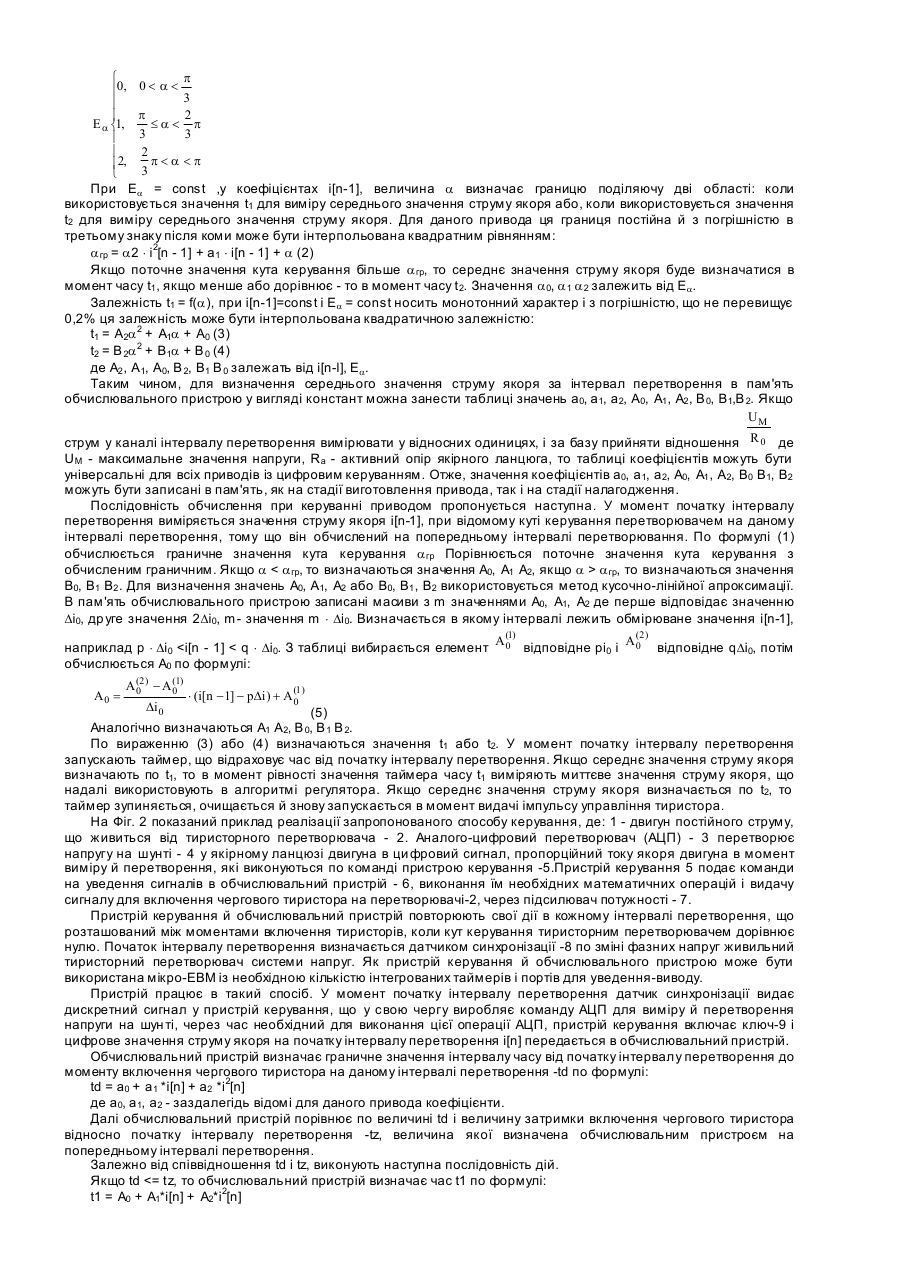
Корисна модель відноситься до електротехніки та може буди використана для регулювання положення і швидкості Електроприводів. Відомий спосіб керування електроприводом постійного струму із цифровими обчислювальними пристроями, описаний в [Файнштейн В.Г., Файнштейн Э.Г. Микропроцессорные системы управления тиристорными электроприводами /Под ред. О.В. Слежановского - М. Энергоатомиздат, 1986, с.75-80]. Як регульований параметр, згідно наведеного способу, використане середнє значення струму якоря за інтервал перетворення. Вимір середнього значення струму за інтервал перетворення виконується шляхом інтегрування залежності якірного струму від часу за інтервал перетворення. При такому способі керування електроприводом постійного струму значення струму надходить в обчислювальний пристрій із запізнюванням, причому, якщо включення чергового тиристора відбувається на початку інтервалу, то запізнювання досягає величини інтервалу перетворення. В основу корисної моделі поставлено задачу удосконалення способу цифрового керування електроприводом постійного струму шля хом обчислення затримки включення чергового тиристора відносно початку наступного інтервалу перетворення, цифровий пристрій керування уведенням (виводом) інформації в (з) обчислювального пристрою, що дозволить підвищити швидкодію процесу керування.Зазначений технічний результат досягається тим, що спосіб керування тиристорним електроприводом постійного струму головних електроприводів прокатних станів, який містить обчислювальний пристрій, що забезпечує регулювання струму й швидкості обертання якоря двигуна шля хом обчислення затримки включення чергового тиристора відносно початку наступного інтервалу перетворення, цифровий пристрій керування уведенням (виводом ) інформації в (з) обчислювального пристрою, згідно корисної моделі, визначення середнього значення струму якоря за інтервал перетворення виконується в тім же інтервалі, де реалізується кут керування шляхом виміру миттєвого значення струму якоря на початку інтервалу перетворення й у момент часу t, що розраховується обчислювальним пристроєм на початку кожного інтервалу перетворення по наближеній формулі, що описує залежність часу виміру, відлічуваного від початку інтервалу перетворення пристроєм керування, від величини затримки включення тиристора на даному інтервалі відносно початку інтервалу – tz, наприклад, шляхом заміни кривої поліномом другого ступеня, де коефіцієнти полінома залежать від величини струму на початку інтервалу перетворення, причому, якщо раніше обчислене граничне значення часу виміру струму-td по наближеній формулі, що зв'язує td зі струмом на початку інтервалу перетворення, менше або дорівнює величині затримки включення чергового тиристора на даному інтервалі tz, то величина t відраховується від початку інтервалу перетворення, у противному випадку t відраховується від моменту включення чергового тиристора. Для пояснення принципу пропонованого способу розглянемо Фіг.1, де показані графіки зміни струму якоря на n-ом інтервалі перетворення. На Фіг.1 Тіn-тривалість інтервалу перетворення, тобто час між точками включення тиристорів при рівності нулю кута керування перетворювачем. Середнє значення струму якоря за інтервал перетворення завжди лежить між граничними значеннями струму якоря, тому завжди існує хоча б одне значення часу, коли середнє значення струму за інтервал дорівнює поточному значенню. Наприклад, у сталому режимі при незмінному значенні кута керування є два значення часу t1 і t2 усередині інтервалу перетворення, коли середнє значення дорівнює його поточному значенню. Таким чином, величину середнього значення струму якоря двигуна можна визначити, не чекаючи закінчення інтервалу, якщо відомо хоча б одне значення часу, коли поточне значення струму якоря дорівнює середньому значенню. Це дозволяє зменшити час запізнювання при вимірі середнього значення струму якоря в порівнянні з відомим способом. Головні електроприводи прокатних станів металургійних заводів працюють у режимі безперервних струмів. У безперервному режимі закон зміни струму якоря від часу описується диференціальним рівнянням: di U( t ) - E( t ) Tc * + i = dt Ra , (1) де : і - миттєве значення струму якоря двигуна на інтервал перетворення; Те - електромагнітна постійна часу якірного ланцюга; U(t) - напруга на виході перетворювача, форма якого залежить від величини кута керування перетворювачем; Е(t)-ЕДС двигуна; Ra - активний опір якірного ланцюга; Середнє значення струму якоря за інтервал перетворення визначається з вираження: Tiin І= ò i( t) * dt, (n -1) Tiin . (2) де : t - поточний час усередині інтервалу, (n - 1)Тіn £ t £ nТіn. Спільне рішення (1) і (2) дають значення t1 й(або) t2, коли поточне значення струму якоря дорівнює середньому значенню. За інтервал перетворення ЕДС двигуна практично не змінюється, тому на значення часу, коли поточне значення струму якоря дорівнює середньому значенню, величина ЕДС при безперервному струмі якоря не робить впливу й з рівняння (1) цю величину можна виключити. Проведені розрахунки показують, що для заданого привода значення t1 (початок відліку від початку інтервалу перетворення) і часу t2 (початок відліку від моменту включення тиристора), коли середнє значення струму за інтервал перетворення дорівнює поточному значенню залежать від двох величин: кута керування й току на початку інтервалу перетворення. Причому, при деяких значеннях кута керування не існує точки рівності зазначених значень до включення тиристора, а при деяких значеннях кута керування не існує точки рівності цих значень після включення тиристора. Ця границя залежить від початкового значення якоря на початку інтервалу перетворення й величини цілої частини кута керування. Ціла частина Еa кута керування визначається в такий спосіб [1]. ì p ï0, 0 < a < 3 ï 2 ï p E a í1, £a< p 3 3 ï ï 2 ï2, 3 p < a < p î При Ea = const ,y коефіцієнтах і[n-1], величина a визначає границю поділяючу дві області: коли використовується значення t1 для виміру середнього значення струму якоря або, коли використовується значення t2 для виміру середнього значення струму якоря. Для даного привода ця границя постійна й з погрішністю в третьому знаку після коми може бути інтерпольована квадратним рівнянням: a гр = a2 × і2[n - 1] + а1 × i[n - 1] + a (2) Якщо поточне значення кута керування більше a гр, то середнє значення струму якоря буде визначатися в момент часу t1 , якщо менше або дорівнює - то в момент часу t 2. Значення a 0, a 1 a 2 залежить від Еa. Залежність t1 = f(a), при i[n-1]=const i Ea = const носить монотонний характер і з погрішністю, що не перевищує 0,2% ця залежність може бути інтерпольована квадратичною залежністю: t1 = A2a 2 + A1a + A0 (3) t2 = B 2a 2 + B1a + B 0 (4) де A2 , A1, A0, B 2, B1 B 0 залежать від i[n-l], Ea. Таким чином, для визначення середнього значення струму якоря за інтервал перетворення в пам'ять обчислювального пристрою у вигляді констант можна занести таблиці значень а0, а1, а2, А0, А1 , А2 , В 0, В1,В 2. Якщо UМ струм у каналі інтервалу перетворення вимірювати у відносних одиницях, і за базу прийняти відношення R 0 де UМ - максимальне значення напруги, Ra - активний опір якірного ланцюга, то таблиці коефіцієнтів можуть бути універсальні для всіх приводів із цифровим керуванням. Отже, значення коефіцієнтів а0, а1, а2, А0, А1 , А2, В0 В1, В2 можуть бути записані в пам'ять, як на стадії виготовлення привода, так і на стадії налагодження. Послідовність обчислення при керуванні приводом пропонується наступна. У момент початку інтервалу перетворення виміряється значення струму якоря і[n-1], при відомому куті керування перетворювачем на даному інтервалі перетворення, тому що він обчислений на попередньому інтервалі перетворювання. По формулі (1) обчислюється граничне значення кута керування a гр Порівнюється поточне значення кута керування з обчисленим граничним. Якщо a a гр, то визначаються значення В0, В1 В2 . Для визначення значень А0, А1, А2 або В0, В1 , В2 використовується метод кусочно-лінійної апроксимації. В пам'ять обчислювального пристрою записані масиви з m значеннями А0, A1, A2 де перше відповідає значенню Di0, др уге значення 2Di0, m- значення m × Di0. Визначається в якому інтервалі лежить обмірюване значення і[n-1], наприклад p × Di0
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for digital control of an dc electric motor of main electric motors of roll mills
Автори англійськоюFainshtejn Vilen Hryhorovych, Tsvitnov Vitalii Oleksandrovych
Назва патенту російськоюСпособ цифрового управления электроприводом постоянного тока главных электроприводов прокатных станов
Автори російськоюФайнштейн Вилен Григорьевич, Цвитнов Виталий Александрович
МПК / Мітки
МПК: H02P 5/00
Мітки: спосіб, прокатних, цифрового, керування, постійного, струму, станів, головних, електроприводом, електроприводів
Код посилання
<a href="https://ua.patents.su/3-32089-sposib-cifrovogo-keruvannya-elektroprivodom-postijjnogo-strumu-golovnikh-elektroprivodiv-prokatnikh-staniv.html" target="_blank" rel="follow" title="База патентів України">Спосіб цифрового керування електроприводом постійного струму головних електроприводів прокатних станів</a>
Спосіб дистанційної діагностики стану механічної частини стрілочного переводу з електроприводом постійного струму
Номер патенту: 8573
Опубліковано: 15.08.2005
Автори: Парфьонов Володимир Іванович, Руденко Олександр Борисович
МПК: B61L 7/00
Мітки: діагностики, електроприводом, спосіб, механічної, стану, частини, струму, постійного, переводу, стрілочного, дистанційно
Формула / Реферат:
Спосіб дистанційної діагностики стану механічної частини стрілочного переводу з електроприводом постійного струму, при якому виділяють, осцилографують і аналізують криву складову споживаного струму, який відрізняється тим, що проводять миттєвий аналіз кривої струму, наприклад за допомогою швидкого розкладання в ряд Фур'є, і при появі в спектрі гармонік в діапазоні 1 - 10000 Гц за їх частотою і амплітудою та параметрами швидкісної частоти...
Система керування тяговим електроприводом змінного струму рудникових електровозів
Номер патенту: 20092
Опубліковано: 15.01.2007
Автори: Караманиць Федір Іванович, Зайцев Ігор Миколайович, Гузов Едуард Семенович, Сінчук Ігор Олегович, Лебьодкін Сергій Вікторович, Сінчук Олег Миколайович
МПК: H02M 5/00
Мітки: струму, електроприводом, електровозів, тяговим, система, рудникових, керування, змінного
Формула / Реферат:
Система керування тяговим електроприводом змінного струму рудникових електровозів, що містить пульт керування машиніста, з'єднувальні проводи, блок захисту і контролю роботи електроустаткування, два тягові асинхронні двигуни, яка відрізняється тим, що система керування забезпечена багаторівневим інвертором напруг з автономним джерелом живлення, при цьому багаторівневий інвертор включає електрично зв'язані з пультом керування два інверторні...
Пристрій автоматичного керування рекуперативним гальмуванням електрорухомого складу постійного струму
Номер патенту: 70566
Опубліковано: 15.10.2004
Автор: Устименко Дмитро Володимирович
МПК: B60L 7/00, B60L 15/20
Мітки: постійного, складу, автоматичного, струму, електрорухомого, пристрій, рекуперативним, керування, гальмуванням
Формула / Реферат:
Пристрій автоматичного керування рекуперативним гальмуванням електрорухомого складу постійного струму, що містить статичний збудник, з'єднаний виходом з незалежною обмоткою збудження тягового двигуна, а входом - з широтно-імпульсним модулятором, до входу якого під'єднаний регулятор струму рекуперації, який відрізняється тим, що він має додатковий блок завдань і початкових умов та розв'язувальний блок, які з'єднані між собою послідовно, вихід...
Тиристорна станція керування для двигунів постійного струму
Номер патенту: 20093
Опубліковано: 15.01.2007
Автор: Сорокін Олександр Ігорович
МПК: H02M 7/12, H02M 1/084
Мітки: постійного, двигунів, станція, керування, струму, тиристорна
Формула / Реферат:
Тиристорна станція керування для двигунів постійного струму, що містить силовий блок основу якого становить 3-фазна мостова схема, виконана на силових тиристорних модулях, і блок керування із системою імпульсно-фазового керування, яка відрізняється тим, що блок керування виконаний у вигляді плати з апаратною частиною, що включає однокристальну мікро-ЕОМ і імпульсне джерело живлення, взаємозалежний із силовим блоком за допомогою передбаченої...
Спосіб визначення зміни якості ізоляції обмотки якоря електродвигуна постійного струму стрілочного переводу
Номер патенту: 20189
Опубліковано: 15.01.2007
Автори: Парфьонов Володимир Іванович, Сердюк Тетяна Миколаївна
МПК: B61L 7/00
Мітки: якоря, струму, спосіб, електродвигуна, обмотки, постійного, визначення, якості, ізоляції, зміни, стрілочного, переводу
Формула / Реферат:
Спосіб визначення змін якості ізоляції обмотки якоря електродвигуна постійного струму стрілочного переводу, при якому після зупинки електродвигуна за допомогою мегаомметра вимірюють і аналізують опір ізоляції обмотки, який відрізняється тим, що додатково на вимірювальну обмотку розряджають конденсатор, фіксуючи криву розряду, порівнюють її з кривою розряду цього ж конденсатора на обмотку якоря з еталонною ізоляцією і при появі розбіжностей...
Попередній патент: Силова головка агрегатного верстата
Наступний патент: Установка для зварювання листових полотнищ
Випадковий патент: Спосіб регулювання чисельності популяцій рослиноживильних кліщів