Швейно-обметувальна машина
Номер патенту: 35263
Опубліковано: 10.09.2008
Автори: Бичок Катерина Петрівна, Пищиков В'ячеслав Олексійович, Орловський Броніслав Вікентійович

Формула / Реферат
1. Швейно-обметувальна машина, що містить корпус з напрямним стержнем для повзуна-голковода, механізм голки, що має кривошип, шатун, коромисло, тричленний шатун та повзун-голковод, яка відрізняється тим, що до кривошипа приєднана триповодкова структурна група Ассура III класу, при цьому тричленний шатун є її базовою ланкою, а поводки утворюють три інші ланки - шатун, коромисло та повзун-голковод.
2. Швейно-обметувальна машина за п. 1, яка відрізняється тим, що шатун та тричленний шатун утворюють кінематичну пару з можливістю переміщення вздовж тричленного шатуна та закріплення в різному положенні.
3. Швейно-обметувальна машина за п. 1, яка відрізняється тим, що коромисло з корпусом утворюють кінематичну пару, елементом якої є колінчастий палець, що закріплений в корпусі з можливістю повороту та фіксації в будь-якому положенні.
Текст
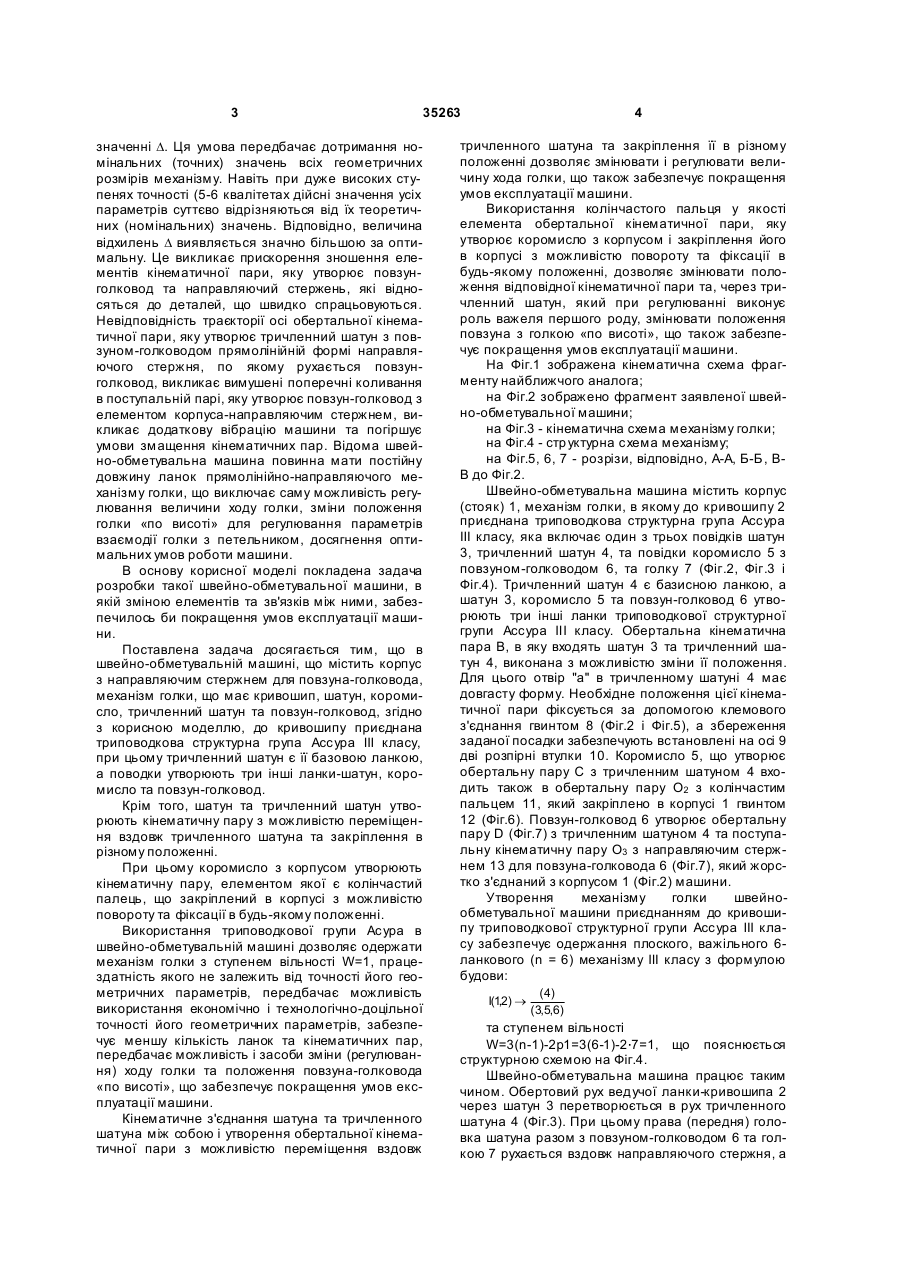
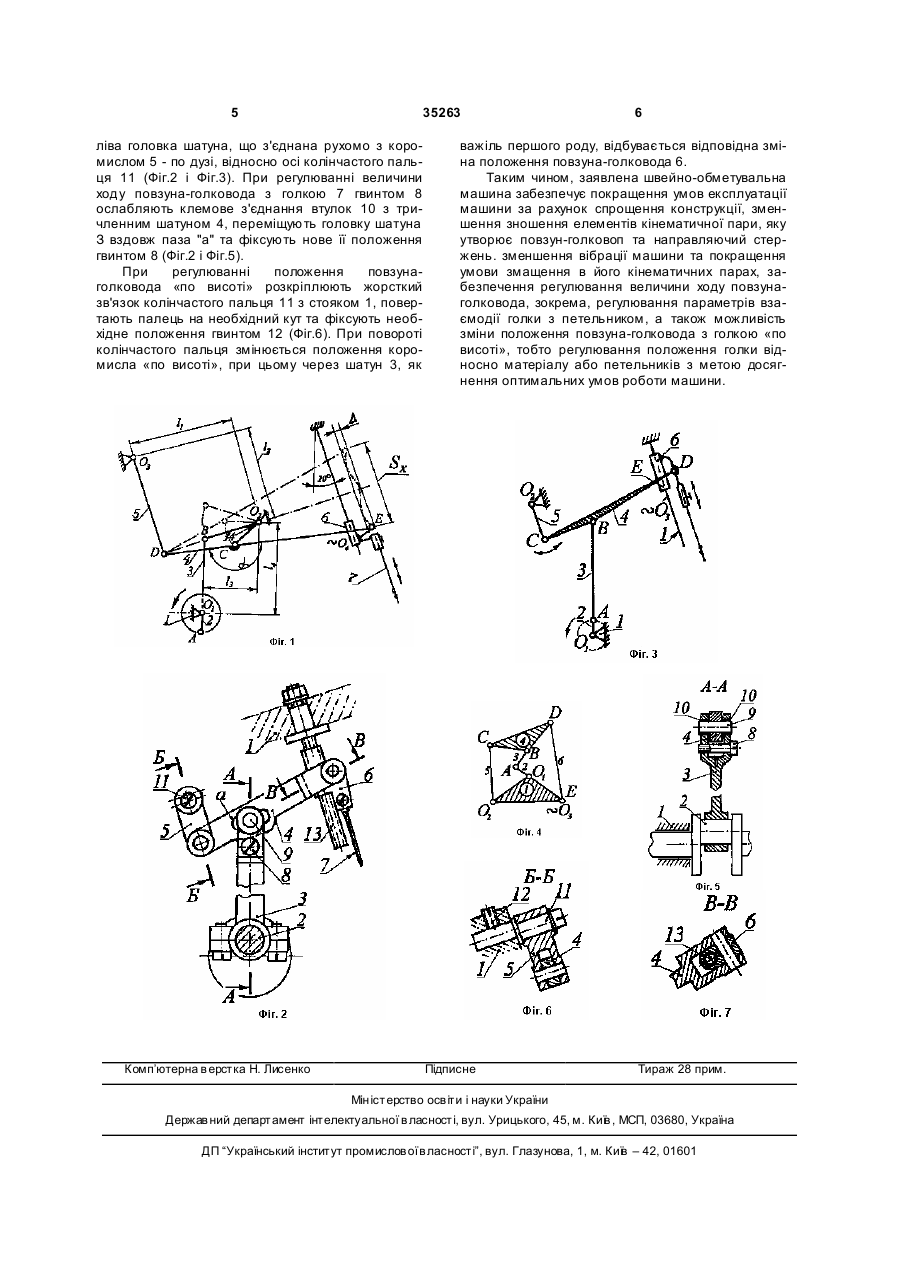
1. Швейно-обметувальна машина, що містить корпус з напрямним стержнем для повзунаголковода, механізм голки, що має кривошип, шатун, коромисло, тричленний шатун та повзунголковод, яка відрізняється тим, що до кривошипа приєднана триповодкова структурна група Ас 3 35263 значенні D. Ця умова передбачає дотримання номінальних (точних) значень всіх геометричних розмірів механізму. Навіть при дуже високих ступенях точності (5-6 квалітетах дійсні значення усіх параметрів суттєво відрізняються від їх теоретичних (номінальних) значень. Відповідно, величина відхилень D виявляється значно більшою за оптимальну. Це викликає прискорення зношення елементів кінематичної пари, яку утворює повзунголковод та направляючий стержень, які відносяться до деталей, що швидко спрацьовуються. Невідповідність траєкторії осі обертальної кінематичної пари, яку утворює тричленний шатун з повзуном-голководом прямолінійній формі направляючого стержня, по якому рухається повзунголковод, викликає вимушені поперечні коливання в поступальній парі, яку утворює повзун-голковод з елементом корпуса-направляючим стержнем, викликає додаткову вібрацію машини та погіршує умови змащення кінематичних пар. Відома швейно-обметувальна машина повинна мати постійну довжину ланок прямолінійно-направляючого механізму голки, що виключає саму можливість регулювання величини ходу голки, зміни положення голки «по висоті» для регулювання параметрів взаємодії голки з петельником, досягнення оптимальних умов роботи машини. В основу корисної моделі покладена задача розробки такої швейно-обметувальної машини, в якій зміною елементів та зв'язків між ними, забезпечилось би покращення умов експлуатації машини. Поставлена задача досягається тим, що в швейно-обметувальній машині, що містить корпус з направляючим стержнем для повзуна-голковода, механізм голки, що має кривошип, шатун, коромисло, тричленний шатун та повзун-голковод, згідно з корисною моделлю, до кривошипу приєднана триповодкова структурна група Ассура III класу, при цьому тричленний шатун є її базовою ланкою, а поводки утворюють три інші ланки-шатун, коромисло та повзун-голковод. Крім того, шатун та тричленний шатун утворюють кінематичну пару з можливістю переміщення вздовж тричленного шатуна та закріплення в різному положенні. При цьому коромисло з корпусом утворюють кінематичну пару, елементом якої є колінчастий палець, що закріплений в корпусі з можливістю повороту та фіксації в будь-якому положенні. Використання триповодкової групи Асура в швейно-обметувальній машині дозволяє одержати механізм голки з ступенем вільності W=1, працездатність якого не залежить від точності його геометричних параметрів, передбачає можливість використання економічно і технологічно-доцільної точності його геометричних параметрів, забезпечує меншу кількість ланок та кінематичних пар, передбачає можливість і засоби зміни (регулювання) ходу голки та положення повзуна-голковода «по висоті», що забезпечує покращення умов експлуатації машини. Кінематичне з'єднання шатуна та тричленного шатуна між собою і утворення обертальної кінематичної пари з можливістю переміщення вздовж 4 тричленного шатуна та закріплення її в різному положенні дозволяє змінювати і регулювати величину хода голки, що також забезпечує покращення умов експлуатації машини. Використання колінчастого пальця у якості елемента обертальної кінематичної пари, яку утворює коромисло з корпусом і закріплення його в корпусі з можливістю повороту та фіксації в будь-якому положенні, дозволяє змінювати положення відповідної кінематичної пари та, через тричленний шатун, який при регулюванні виконує роль важеля першого роду, змінювати положення повзуна з голкою «по висоті», що також забезпечує покращення умов експлуатації машини. На Фіг.1 зображена кінематична схема фрагменту найближчого аналога; на Фіг.2 зображено фрагмент заявленої швейно-обметувальної машини; на Фіг.3 - кінематична схема механізму голки; на Фіг.4 - стр уктурна схема механізму; на Фіг.5, 6, 7 - розрізи, відповідно, А-А, Б-Б, ВВ до Фіг.2. Швейно-обметувальна машина містить корпус (стояк) 1, механізм голки, в якому до кривошипу 2 приєднана триповодкова структурна група Ассура III класу, яка включає один з трьох повідків шатун 3, тричленний шатун 4, та повідки коромисло 5 з повзуном-голководом 6, та голку 7 (Фіг.2, Фіг.3 і Фіг.4). Тричленний шатун 4 є базисною ланкою, а шатун 3, коромисло 5 та повзун-голковод 6 утворюють три інші ланки триповодкової структурної групи Ассура III класу. Обертальна кінематична пара В, в яку входять шатун 3 та тричленний шатун 4, виконана з можливістю зміни її положення. Для цього отвір "а" в тричленному шатуні 4 має довгасту форму. Необхідне положення цієї кінематичної пари фіксується за допомогою клемового з'єднання гвинтом 8 (Фіг.2 і Фіг.5), а збереження заданої посадки забезпечують встановлені на осі 9 дві розпірні втулки 10. Коромисло 5, що утворює обертальну пару С з тричленним шатуном 4 входить також в обертальну пару О2 з колінчастим пальцем 11, який закріплено в корпусі 1 гвинтом 12 (Фіг.6). Повзун-голковод 6 утворює обертальну пару D (Фіг.7) з тричленним шатуном 4 та поступальну кінематичну пару О3 з направляючим стержнем 13 для повзуна-голковода 6 (Фіг.7), який жорстко з'єднаний з корпусом 1 (Фіг.2) машини. Утворення механізму голки швейнообметувальної машини приєднанням до кривошипу триповодкової структурної групи Ассура III класу забезпечує одержання плоского, важільного 6ланкового (n = 6) механізму III класу з формулою будови: I(1,2) ® ( 4) ( 3,5,6) та ступенем вільності W=3(n-1)-2р1=3(6-1)-2∙7=1, що пояснюється структурною схемою на Фіг.4. Швейно-обметувальна машина працює таким чином. Обертовий рух ведучої ланки-кривошипа 2 через шатун 3 перетворюється в рух тричленного шатуна 4 (Фіг.3). При цьому права (передня) головка шатуна разом з повзуном-голководом 6 та голкою 7 рухається вздовж направляючого стержня, а 5 35263 ліва головка шатуна, що з'єднана рухомо з коромислом 5 - по дузі, відносно осі колінчастого пальця 11 (Фіг.2 і Фіг.3). При регулюванні величини ходу повзуна-голковода з голкою 7 гвинтом 8 ослабляють клемове з'єднання втулок 10 з тричленним шатуном 4, переміщують головку шатуна З вздовж паза "а" та фіксують нове її положення гвинтом 8 (Фіг.2 і Фіг.5). При регулюванні положення повзунаголковода «по висоті» розкріплюють жорсткий зв'язок колінчастого пальця 11 з стояком 1, повертають палець на необхідний кут та фіксують необхідне положення гвинтом 12 (Фіг.6). При повороті колінчастого пальця змінюється положення коромисла «по висоті», при цьому через шатун 3, як Комп’ютерна в ерстка Н. Лисенко 6 важіль першого роду, відбувається відповідна зміна положення повзуна-голковода 6. Таким чином, заявлена швейно-обметувальна машина забезпечує покращення умов експлуатації машини за рахунок спрощення конструкції, зменшення зношення елементів кінематичної пари, яку утворює повзун-голковоп та направляючий стержень. зменшення вібрації машини та покращення умови змащення в його кінематичних парах, забезпечення регулювання величини ходу повзунаголковода, зокрема, регулювання параметрів взаємодії голки з петельником, а також можливість зміни положення повзуна-голковода з голкою «по висоті», тобто регулювання положення голки відносно матеріалу або петельників з метою досягнення оптимальних умов роботи машини. Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюOverseaming sewing machine
Автори англійськоюOrlovskyi Bronislav Vikentiiovych, Pyschykov Viacheslav Oleksiiovych, Bychok Kateryna Petrivna
Назва патенту російськоюШвейно-обметочная машина
Автори російськоюОрловский Бронислав Викентьевич, Пищиков Вячеслав Алексеевич, Бычок Катерина Петровна
МПК / Мітки
МПК: D05B 3/00
Мітки: швейно-обметувальна, машина
Код посилання
<a href="https://ua.patents.su/3-35263-shvejjno-obmetuvalna-mashina.html" target="_blank" rel="follow" title="База патентів України">Швейно-обметувальна машина</a>
Човникова швейна машина

Номер патенту: 19352
Опубліковано: 15.12.2006
Автори: Пищиков В'ячеслав Олексійович, Мачульський Валерій Борисович, Орловський Броніслав Вікентійович
МПК: D05B 63/00, D05B 3/00
Мітки: швейна, човникова, машина
Формула / Реферат:
Човникова швейна машина, що містить механізм ниткопритягача, який включає встановлені в корпусі головки швейної машини кривошип, шатун і коромисло, які мають відростки з вічками на їх кінцях, та нитконапрямляч короткої гілки нитки, закріплений на корпусі головки швейної машини, яка відрізняється тим, що оснащена нитконапрямлячем довгої гілки нитки, закріпленим в корпусі головки машини, а коромисло має додатковий відросток з вічком на...
Човникова швейна машина

Номер патенту: 70164
Опубліковано: 15.09.2004
Автори: Абрінова Наталія Сергіївна, Пищиков В'ячеслав Олексійович, Орловський Броніслав Вікентійович
МПК: D05B 3/00
Мітки: машина, човникова, швейна
Формула / Реферат:
Човникова швейна машина, що містить кривошипно-коромисловий механізм ниткопритягача з відростком шатуна, що містить вічко для голкової нитки, яка відрізняється тим, що відросток шатуна виконаний розвилкуватим і має додаткове вічко, при цьому між вічками встановлений криволінійний напрямний стержень, закріплений на корпусі машини.
Поршнева машина

Номер патенту: 3121
Опубліковано: 15.10.2004
Автори: Носко Павло Леонідович, Ахтямов Альберт Мінахметович
МПК: F01B 9/00, F02B 75/26
Формула / Реферат:
Поршнева машина, що містить корпус, циліндр із клапанним розподільним механізмом, поршень зі штоком, встановлений у циліндрі з можливістю зворотно-поступального переміщення, кривошип і коромисло, шарнірно закріплені в корпусі з можливістю обертального руху в паралельних площинах, шатун, виконаний у вигляді V-подібного симетричного важеля, плечі якого розташовані під кутом 90°, коромисло шарнірно зв'язане з вершиною цього важеля, а кривошип і...
Двоходовий кривошипно-колінний механізм механічного преса
Номер патенту: 23725
Опубліковано: 11.06.2007
Автори: Рей Мирослава Романівна, Гутько Юрій Іванович
МПК: B21J 7/00
Мітки: кривошипно-колінний, преса, двоходовий, механічного, механізм
Формула / Реферат:
Двоходовий кривошипно-колінний механізм механічного преса, що містить ведучий кривошип, шатун, колінний механізм і повзун, який відрізняється тим, що вісь обертання ведучого кривошипа і вісь качання стержня колінного механізму розташовані по один бік шатуна, а при надходженні повзуна в крайньому нижньому положенні вісь ведучого кривошипа паралельна осям стержнів колінного механізму та утворює прямий кут з віссю шатуна.
Поршнева машина або двигун внутрішнього згоряння з рядним розташуванням циліндрів
Номер патенту: 37150
Опубліковано: 16.04.2001
Автор: Валюх Василь Миколайович
МПК: F02B 75/20
Мітки: розташуванням, внутрішнього, згоряння, рядним, машина, двигун, циліндрів, поршнева
Текст:
...правий поз. 5 в протилежному напрямках, передаючи через шатунні пари поршнів поз. З поступальний рух (одним - вниз, іншим - вверх) решті поршнів циліндро-поршневого ряду. Рух повзунів поз. 4 і поз. 5 діє на шатуни поз. 6 і поз. 8, які пере творюють поступальний рух в обертальний шарнірним зв'язком з колінчастим валом поз. 7. Синхронний різнонаправлений рух повз унів поз. 4 і поз. 5 забезпечує синхронний і різнонаправлений рух шатунів ша...
Попередній патент: Спосіб визначення швидкості поширення електричних імпульсів у електричних лініях зв’язку
Наступний патент: Пристрій для завантаження сипких матеріалів в клапанні мішки
Випадковий патент: Вакцина "вельшілістерісан" інактивована асоційована концентрована для профілактики токсикоінфекцій, що викликаються clostridium perfringens, та лістеріозу тварин