Надлишковий блок двигунів-маховиків
Номер патенту: 35598
Опубліковано: 25.09.2008
Автори: Субота Анатолій Максимович, Кулік Анатолій Степанович, Резнікова Ольга Вікторівна

Формула / Реферат
Надлишковий блок двигунів-маховиків, що містить у своєму складі чотири двигуни-маховики, який відрізняється тим, що осі власного обертання двигунів-маховиків співпадають з ребрами правильної чотирикутної у основі піраміди, при цьому кінетичні моменти двох двигунів-маховиків, розташованих на діаметрально протилежних ребрах піраміди, мають напрям у бік вершини, а напрям кінетичних моментів інших двох двигунів-маховиків лежить у бік основи піраміди, діагоналі якої з ребрами піраміди утворюють кут у 30 градусів.
Текст
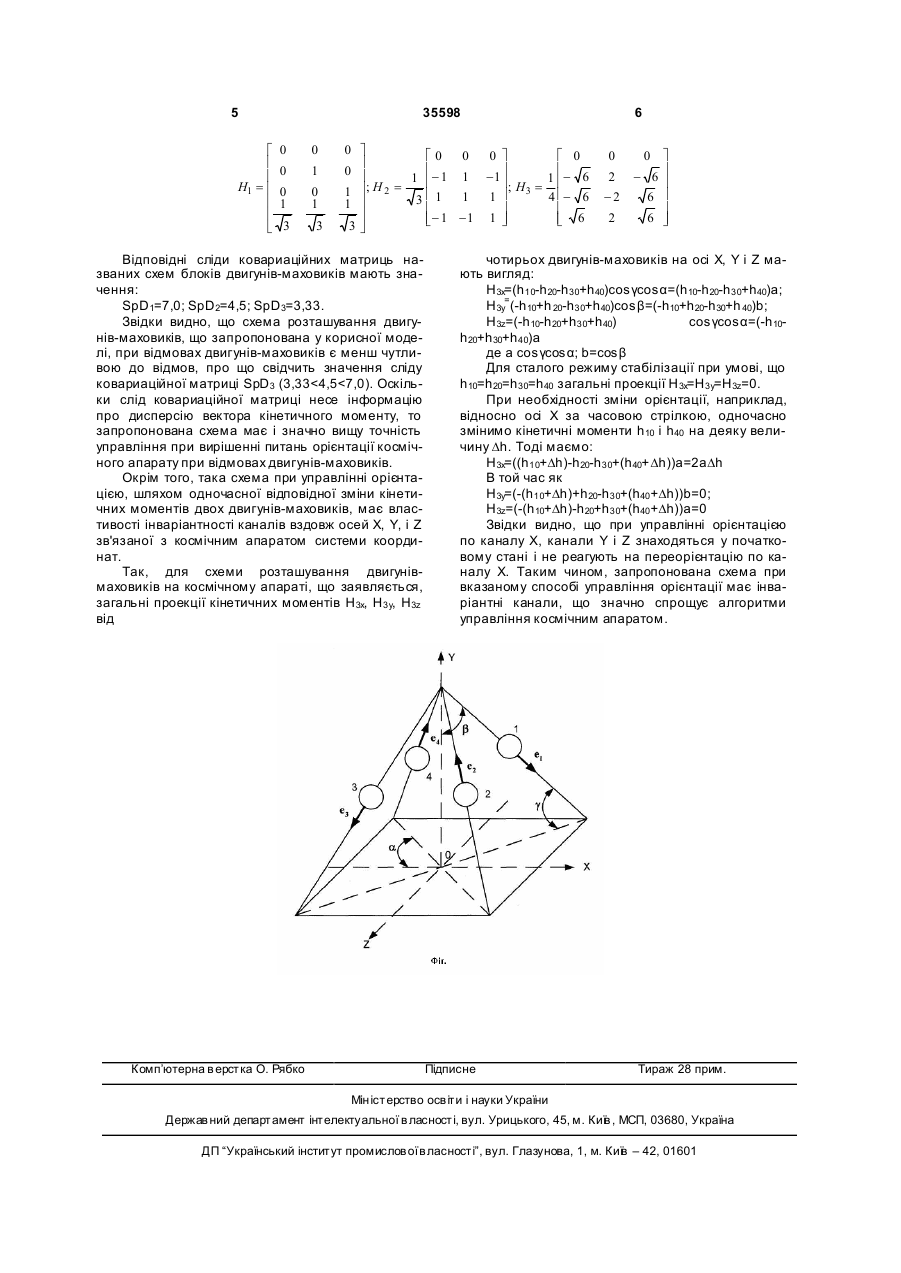
Надлишковий блок двигунів-маховиків, що містить у своєму складі чотири двигуни-маховики, який відрізняється тим, що осі власного обертання двигунів-маховиків співпадають з ребрами правильної чотирикутної у основі піраміди, при цьому кінетичні моменти двох двигунів-маховиків, розташованих на діаметрально протилежних ребрах піраміди, мають напрям у бік вершини, а напрям кінетичних моментів інших двох двигунів-маховиків лежить у бік основи піраміди, діагоналі якої з ребрами піраміди утворюють кут у 30 градусів. (19) (21) u200805651 (22) 30.04.2008 (24) 25.09.2008 (46) 25.09.2008, Бюл.№ 18, 2008 р. (72) КУЛІК АНАТОЛІЙ СТЕПАНОВИЧ, UA, СУБОТА АНАТОЛІЙ МАКСИ МОВИЧ, U A, РЕЗНІКОВА ОЛЬГА ВІКТОРІВН А, UA (73) НАЦІОН АЛЬНИЙ АЕРОКОС МІЧНИЙ УНІВЕРСИТЕТ ІМ. М.Є.ЖУКОВСЬКОГО "ХАРКІВСЬКИЙ АВІАЦІЙНИЙ ІНСТИТУТ", UA 3 35598 Запропоноване технічне рішення пояснюється на фіг. Надлишковий блок двигунів-маховиків містить чотири двигуни-маховики 1, 2, 3, 4, осі власного обертання яких розташовані вздовж ребер правильної чотирикутної в основі піраміди. Орти е1 е2, е3, е4, котрі зв'язані з осями власного обертання двигунів-маховиків, мають напрями, що співпадають з кінетичними моментами однойменних двигунів-маховиків. При цьому напрями кінетичних моментів першого і третього двигунів-маховиків направлені від вершини до основи, а напрями кінетичних моментів другого і четвертого двигунівмаховиків направлені від основи до вершини. Діагоналі квадрата, що є основою піраміди, утворюють з ребрами піраміди кут γ=30°, а з осями ОХ і OZ зв'язаної з космічним апаратом системи координат - кут α=45°. Принцип дії системи стабілізації і орієнтації космічного апарата з двигунами-маховиками полягає у наступному. На орбіті космічний апарат працює у двох режимах: стабілізації і орієнтації. При наявності зовнішніх збурюючих моментів, що виникають внаслідок впливу на космічний апарат складових гравітаційного і аеродинамічного моментів, тиску сонячної радіації та інших збурюючих дій, космічний апарат поступово втрачає свою початкову орієнтацію. Згідно з законом прецесії, під дією збурюючого моменту М3 при наявності кінетичного моменту Н одного з двигунів-маховиків виникне кутова швидкість прецесії M w= 3 . H Це негативне явище призводить до зміни початкової орієнтації космічного апарата. З метою усунення цього явища у схемі, що заявляється передбачено таке розташування двигунівмаховиків на космічному апараті, що відбувається взаємна компенсація кутової швидкості прецесії за é ê ê H1 = ê ê ê ê ë 1 0 0 1 0 1 0 1 3 3 3 å dij i=1 допомогою двигуна-маховика, що має протилежний знак кінетичного моменту. Ма тематично це можна пояснити таким чином: M M M M w1 = 3 ; w2 = 3 ; D w = w1 - w2 = 3 - 3 H1 H2 H1 H2 звідки видно, що при умові Н1=Н2 кутові швидкості ω1 і ω2 компенсуються і космічний апарата не змінює орієнтацію. Для зміни кутового положення відносно осі, наприклад ОХ, згідно з теоретичними положеннями, необхідно змінити кутову швидкість двигунамаховика на деяку величину ∆Ω: Ωx=Ω x0±∆Ω x. При цьому кінетичний момент Нх для збуренного руху космічного апарата відносно осі X буде мати значення: × H x = Ix g + Jx W x ± Jx DW x де I x, J x - моменти інерції, відповідно, космічного апарата і двигунамаховика; γ - кут крену. Оскільки для незбуреного руху Hx0 = JxW x0 , × де D=[НтН]-1 - ковариаційна матриця; Н - матриця направляючих косинусів, що визначає розташування у просторі осей кінетичних моментів двигунів-маховиків; Нт - транспонована матриця; [НтН]-1 - зворотна матриця; dij - елементи сліду ковариаційної матриці. × Jx DW x . Ix Для даної схеми, щоб змінити орієнтацію відносно осі X потрібно одночасно змінити кутову швидкість першого і четвертого, або другого і третього маховиків на деяку величину, про що буде показано нижче. З метою порівняльного аналізу чутли вості до відмов двигунів-маховиків розглянемо матриці направляючих косинусів Н 1, Н2, Н3 відповідно до схем розташування двигунів-маховиків на космічному апараті за стандартом NASA, фірми General Electric і згідно з даною корисною моделлю: то Ix g ± Jx DW x = 0 , звідки g = ± ù é é 1 - 1 - 1ù ú ê ê- 1 1 - 1ú ú 1 ê ú; H = 1 êú; H2 = 1 1 ú 3 4 ê3ê1 ú ê ê ú ú ê- 1 - 1 1 ú ê ë û ë 3 ú û 0 0 1 1 Для порівняння даних варіантів з точки зору якості функціонування системи стабілізації та орієнтації виберемо слід кореляційної матриці похибок вимірювання результуючого вектора кінетичного моменту SpD = 4 6 6 6 6 -2 6 ù ú 2 - 6ú -2 6 ú ú 2 6 ú û У нашому випадку значення слідів ковариаційних матриць відповідно до схеми за стандартом NASA SpD1=2,5. За схемою фірми General Electric SpD2=2,25. За схемою згідно з корисною моделлю SpD3=2,33. Як видно з чисельних значень слідів матриць при працездатності усіх чотирьох двигунівмаховиків, характеристики усіх трьох схем, з точки зору точності орієнтації і стабілізації, близькі за своєю ефективністю. При відмові одного, наприклад з першим порядковим номером двигуна-маховика (ДМ1), будемо мати наступні матриці направляючих косинусів 5 é ê ê H1 = ê ê ê ë 35598 0 0 0 0 1 1 0 1 3 3 0 ù é0 0 0 ù é 0 ú ê- 1 1 -1 ú ê 0 ú 1 ê ú; H = 1 ê- 6 ; H2 = 3 1 ú 4 ê- 6 3ê1 1 1 ú 1 ú ê ú ê ú ê- 1 -1 1 ú ê 6 ë û ë 3û Відповідні сліди ковариаційних матриць названих схем блоків двигунів-маховиків мають значення: SpD1=7,0; SpD2=4,5; SpD3=3,33. Звідки видно, що схема розташування двигунів-маховиків, що запропонована у корисної моделі, при відмовах двигунів-маховиків є менш чутливою до відмов, про що свідчить значення сліду ковариаційної матриці SpD3 (3,33
ДивитисяДодаткова інформація
Назва патенту англійськоюExcess block of flywheel motors
Автори англійськоюKulik Anatolii Stepanovych, Subota Anatolii Maksymovych, Reznikova Olha Viktorivna
Назва патенту російськоюИзбыточный блок двигателей-маховиков
Автори російськоюКулик Анатолий Степанович, Суббота Анатолий Максимович, Резникова Ольга Викторовна
МПК / Мітки
МПК: B64G 1/24
Мітки: двигунів-маховиків, блок, надлишковий
Код посилання
<a href="https://ua.patents.su/3-35598-nadlishkovijj-blok-dviguniv-makhovikiv.html" target="_blank" rel="follow" title="База патентів України">Надлишковий блок двигунів-маховиків</a>
Функціонально-надлишковий інерціальний вимірювальний блок
Номер патенту: 7058
Опубліковано: 15.06.2005
Автори: Гордін Олександр Григорович, Калашникова Валерія Михайлівна, Шипітько Олена Олександрівна
МПК: G01C 21/00
Мітки: функціонально-надлишковий, інерціальній, блок, вимірювальний
Формула / Реферат:
1. Функціонально-надлишковий інерціальний вимірювальний блок, що включає чотири одноступеневих вимірювачі довільно спрямованого векторного параметра, осі чутливості яких представляють вимірювальний базис, розташовані по твірних конуса, мають спільний початок на осі конуса, який відрізняється тим, що в нього введена система обробки інформації, яка включає чотири обчислювальних пристрої, що споживають інформацію вимірювачів, вхід першого з...
Енергоінформаційний конверсор баландіна – екб-1
Номер патенту: 794
Опубліковано: 16.04.2001
Автор: Баландін Костянтин Юрійович
МПК: G12B 17/00
Мітки: конверсор, енергоінформаційний, баландіна, екб-1
Формула / Реферат:
Енергоінформаційний конверсор для захисту, й очищення біологічних об'єктів від шкідливих енергоінформаційних випромінювань, що містить просторово-геометричний каркас пірамідальної форми, який відрізняється тим, що каркас утворений великою пірамідою зі свастикою у її фундаменті та малою внутрішньою перевернутою пірамідою, вершини фундаменту якої розташовані у середніх точках ребер великої піраміди, а вершина - у місці перехрещення діагоналей...
Паливний фільтр для дизельних двигунів з прямою інжекцією за допомогою високого тиску із загальною паливною магістраллю та інших конструктивно подібних двигунів
Номер патенту: 83811
Опубліковано: 26.08.2008
Автор: Джіронді Джорджо
МПК: F02M 37/22, B01D 35/14
Мітки: дизельних, інших, магістраллю, високого, загальною, прямою, тиску, подібних, паливний, двигунів, конструктивно, паливною, фільтр, інжекцією, допомогою
Формула / Реферат:
1. Паливний фільтр для дизельних двигунів з прямою інжекцією за допомогою високого тиску з загальною паливною магістраллю та конструктивно подібних двигунів, який містить зовнішній корпус-стакан, в якому знаходиться впускний паливний патрубок (3) та випускний патрубок (4), а також встановлені всередину корпусу-стакана засоби фільтрування, і корпус-стакан містить верхню камеру (6) для розташування в ній засобів фільтрування, нижньої камери...
Спосіб одержання палива для реактивних двигунів і паливо для реактивних двигунів
Номер патенту: 61261
Опубліковано: 15.02.2007
Автори: Герус Анатолій Васильович, Матицин Володимир Митрофанович
МПК: C10L 1/10, C10L 1/00, C10L 10/08
Мітки: спосіб, реактивних, одержання, паливо, палива, двигунів
Формула / Реферат:
1. Спосіб одержання палива для реактивних двигунів, що включає змішування гідроочищеного гасу фракції 140-280 °С з протиокисною і протизношувальною присадками, який відрізняється тим, що попередньо готують концентрат протиокисної і протизношувальної присадок на основі гідроочищеного гасу фракції 140-280 °С шляхом перемішування компонентів при такому їх співвідношенні, мас. %: протиокисна присадка 3,8-4,1 ...
Спосіб кодування та декодування, блок кодерів, блок декодерів, і система кодера та декодера
Номер патенту: 44779
Опубліковано: 15.03.2002
Автори: Хладік Стефен Майкл, Андерсон Джон Бейлі
МПК: H03M 13/23, H03M 13/27
Мітки: кодування, блок, декодування, кодерів, кодера, спосіб, декодера, декодерів, система
Формула / Реферат:
1. Спосіб паралельно-каскадного згорнутого кодування, що складається з кроку: надходження блока, даних на блок кодерів, що складається з множини N кодерів та N-1 переміжників з'єднаних паралельно, який відрізняється тим, що додатково містить кроки:кодування блока, даних у першому кодері за допомогою нерекурсивного систематичного згорнутого коду з відтинанням закінчень та одержанням відповідної першої складової кодованого слова, що...
Попередній патент: Регулятор подачі палива в газотурбінний двигун
Наступний патент: Спосіб корекції сурфактантних властивостей крові у хворих на хронічне обструктивне захворювання легень
Випадковий патент: Шлюз для штаби