Робоче обладнання бульдозерного типу для захоплювання та переміщення вантажів
Номер патенту: 35837
Опубліковано: 10.10.2008
Формула / Реферат
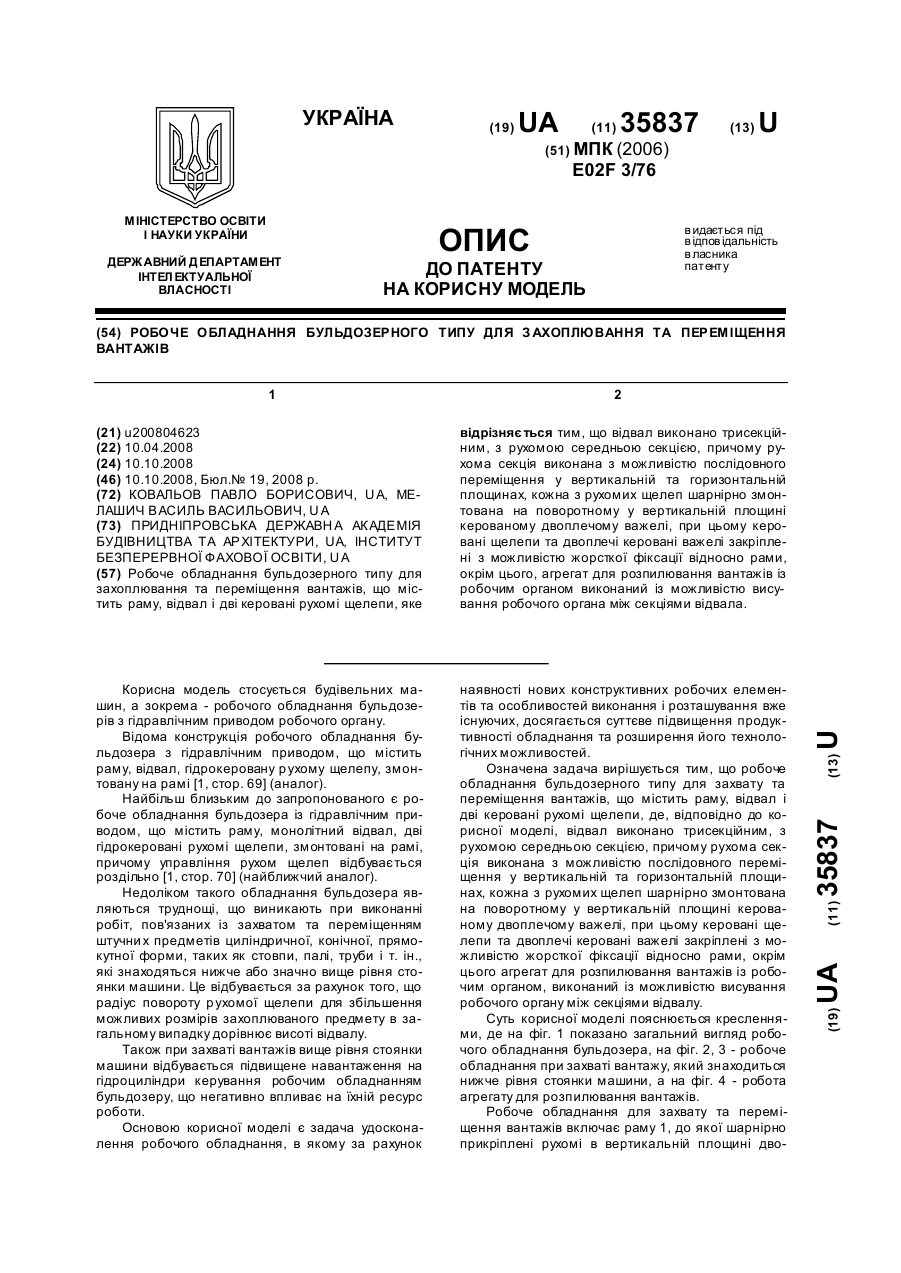
Робоче обладнання бульдозерного типу для захоплювання та переміщення вантажів, що містить раму, відвал і дві керовані рухомі щелепи, яке відрізняється тим, що відвал виконано трисекційним, з рухомою середньою секцією, причому рухома секція виконана з можливістю послідовного переміщення у вертикальній та горизонтальній площинах, кожна з рухомих щелеп шарнірно змонтована на поворотному у вертикальній площині керованому двоплечому важелі, при цьому керовані щелепи та двоплечі керовані важелі закріплені з можливістю жорсткої фіксації відносно рами, окрім цього, агрегат для розпилювання вантажів із робочим органом виконаний із можливістю висування робочого органа між секціями відвала.
Текст
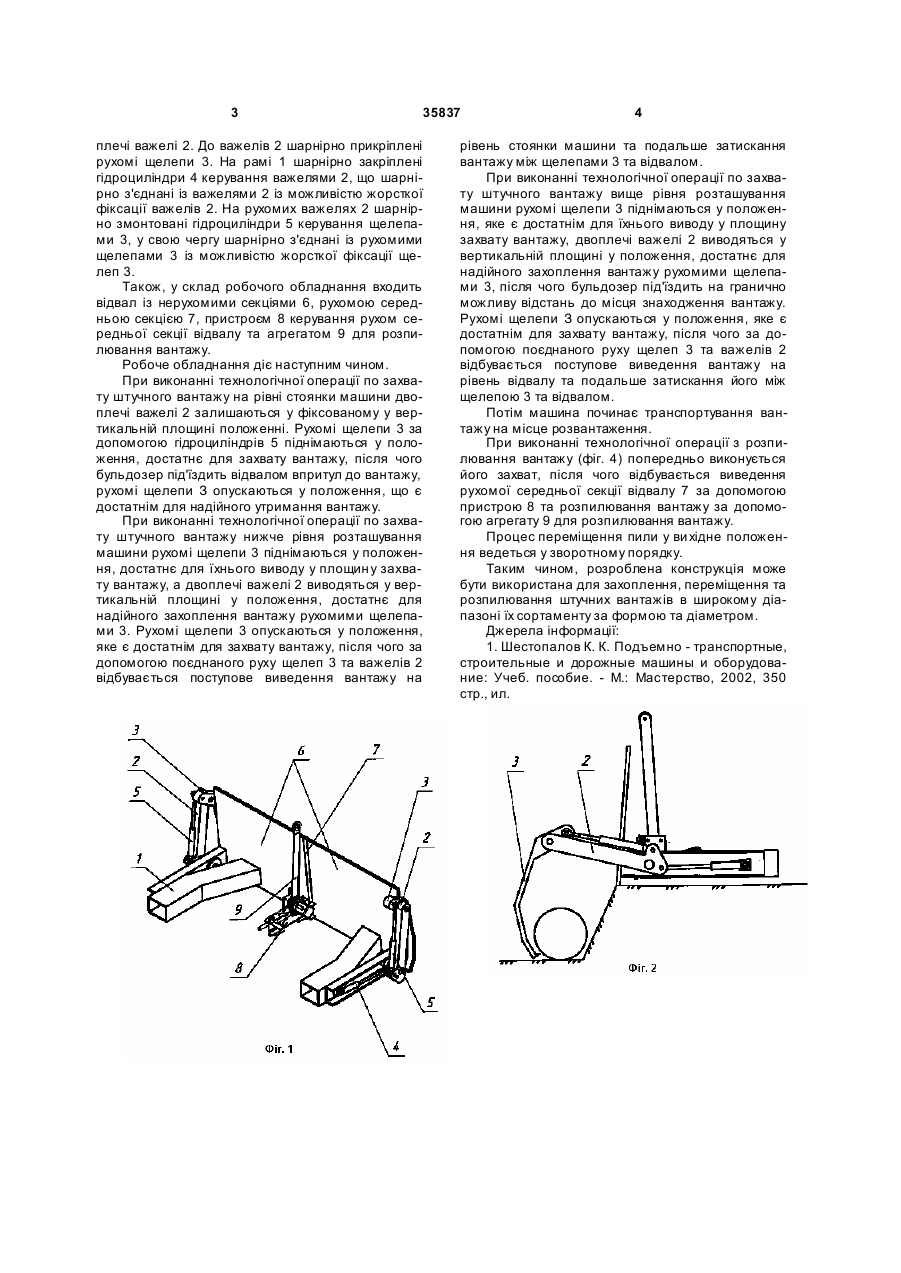
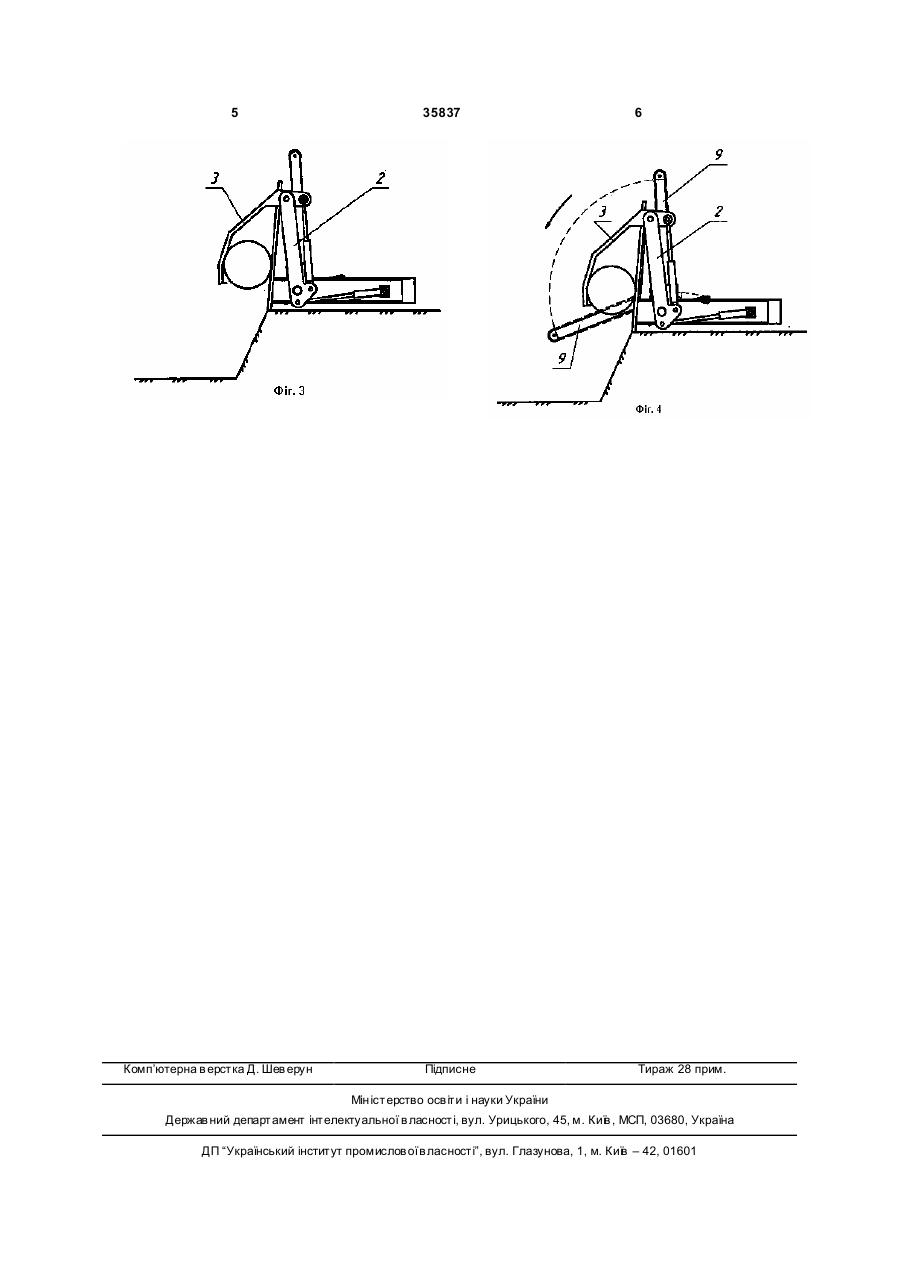
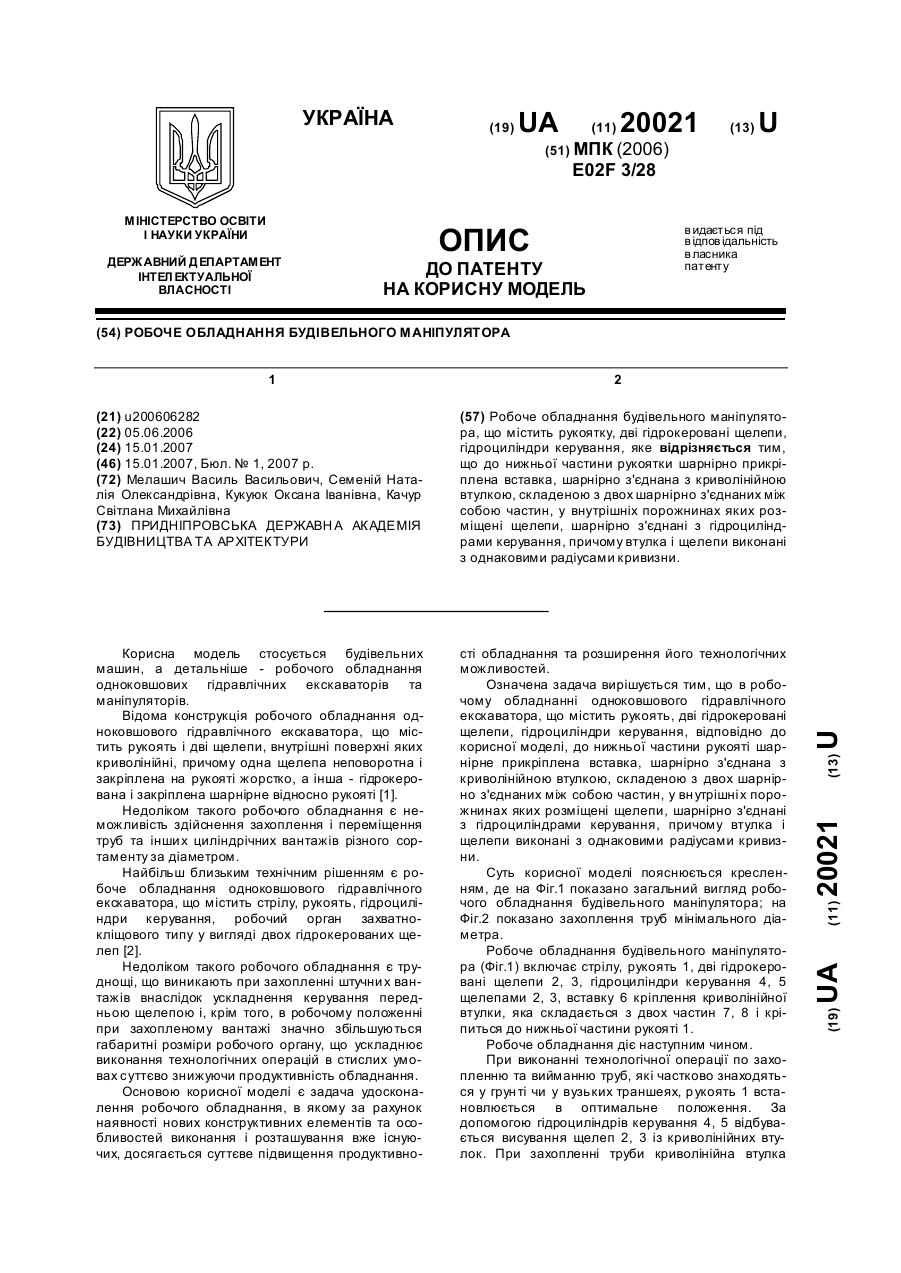
Робоче обладнання бульдозерного типу для захоплювання та переміщення вантажів, що містить раму, відвал і дві керовані рухомі щелепи, яке 3 35837 плечі важелі 2. До важелів 2 шарнірно прикріплені рухомі щелепи 3. На рамі 1 шарнірно закріплені гідроциліндри 4 керування важелями 2, що шарнірно з'єднані із важелями 2 із можливістю жорсткої фіксації важелів 2. На рухомих важелях 2 шарнірно змонтовані гідроциліндри 5 керування щелепами 3, у свою чергу шарнірно з'єднані із рухомими щелепами 3 із можливістю жорсткої фіксації щелеп 3. Також, у склад робочого обладнання входить відвал із нерухомими секціями 6, рухомою середньою секцією 7, пристроєм 8 керування рухом середньої секції відвалу та агрегатом 9 для розпилювання вантажу. Робоче обладнання діє наступним чином. При виконанні технологічної операції по захвату штучного вантажу на рівні стоянки машини двоплечі важелі 2 залишаються у фіксованому у вертикальній площині положенні. Рухомі щелепи 3 за допомогою гідроциліндрів 5 піднімаються у положення, достатнє для захвату вантажу, після чого бульдозер під'їздить відвалом впритул до вантажу, рухомі щелепи З опускаються у положення, що є достатнім для надійного утримання вантажу. При виконанні технологічної операції по захвату штучного вантажу нижче рівня розташування машини рухомі щелепи 3 піднімаються у положення, достатнє для їхнього виводу у площин у захвату вантажу, а двоплечі важелі 2 виводяться у вертикальній площині у положення, достатнє для надійного захоплення вантажу рухомими щелепами 3. Рухомі щелепи 3 опускаються у положення, яке є достатнім для захвату вантажу, після чого за допомогою поєднаного руху щелеп 3 та важелів 2 відбувається поступове виведення вантажу на 4 рівень стоянки машини та подальше затискання вантажу між щелепами 3 та відвалом. При виконанні технологічної операції по захвату штучного вантажу вище рівня розташування машини рухомі щелепи 3 піднімаються у положення, яке є достатнім для їхнього виводу у площину захвату вантажу, двоплечі важелі 2 виводяться у вертикальній площині у положення, достатнє для надійного захоплення вантажу рухомими щелепами 3, після чого бульдозер під'їздить на гранично можливу відстань до місця знаходження вантажу. Рухомі щелепи З опускаються у положення, яке є достатнім для захвату вантажу, після чого за допомогою поєднаного руху щелеп 3 та важелів 2 відбувається поступове виведення вантажу на рівень відвалу та подальше затискання його між щелепою 3 та відвалом. Потім машина починає транспортування вантажу на місце розвантаження. При виконанні технологічної операції з розпилювання вантажу (фіг. 4) попередньо виконується його захват, після чого відбувається виведення рухомої середньої секції відвалу 7 за допомогою пристрою 8 та розпилювання вантажу за допомогою агрегату 9 для розпилювання вантажу. Процес переміщення пили у ви хідне положення ведеться у зворотному порядку. Таким чином, розроблена конструкція може бути використана для захоплення, переміщення та розпилювання штучних вантажів в широкому діапазоні їх сортаменту за формою та діаметром. Джерела інформації: 1. Шестопалов К. К. Подъемно - транспортные, строительные и дорожные машины и оборудование: Учеб. пособие. - М.: Мастерство, 2002, 350 стр., ил. 5 Комп’ютерна в ерстка Д. Шев ерун 35837 6 Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюExecutive equipment of bulldozer type for holding and handling of loads
Автори англійськоюKovaliov Pavlo Borysovych, Melashych Vasyl Vasyliovych
Назва патенту російськоюРабочее оборудоване бульдозерного типа для захвата и перемещения грузов
Автори російськоюКовалев Павел Борисович, Мелашич Василий Васильевич
МПК / Мітки
МПК: E02F 3/76
Мітки: робоче, переміщення, бульдозерного, вантажів, типу, захоплювання, обладнання
Код посилання
<a href="https://ua.patents.su/3-35837-roboche-obladnannya-buldozernogo-tipu-dlya-zakhoplyuvannya-ta-peremishhennya-vantazhiv.html" target="_blank" rel="follow" title="База патентів України">Робоче обладнання бульдозерного типу для захоплювання та переміщення вантажів</a>
Робоче обладнання

Номер патенту: 47588
Опубліковано: 15.07.2002
Автори: Уріх Євген Йосипович, Хмара Леонід Андрійович, Кулик Ігор Анатолійович, Соколов Ігор Анатолійович, Блехарська Олена Миколаївна
МПК: E02F 3/28
Мітки: обладнання, робоче
Формула / Реферат:
Робоче обладнання, що містить стрілу, рукоять, дві щелепи та гідроциліндри керування стрілою, рукояттю і робочим органом, який відрізняється тим, що він додатково обладнаний двома гідроциліндрами, які керують розкриттям щелеп, крім того, на нижньому кінці рукояті закріплена вставка, у верхній частині якої встановлені гідроциліндри, а середня - шарнірно з'єднана з щелепами.
Робоче обладнання будівельного маніпулятора
Номер патенту: 20021
Опубліковано: 15.01.2007
Автори: Семеній Наталія Олександрівна, Кукуюк Оксана Іванівна, Качур Світлана Михайлівна, Мелашич Василь Васильович
МПК: E02F 3/28
Мітки: обладнання, будівельного, робоче, маніпулятора
Формула / Реферат:
Робоче обладнання будівельного маніпулятора, що містить рукоятку, дві гідрокеровані щелепи, гідроциліндри керування, яке відрізняється тим, що до нижньої частини рукоятки шарнірно прикріплена вставка, шарнірно з'єднана з криволінійною втулкою, складеною з двох шарнірно з'єднаних між собою частин, у внутрішніх порожнинах яких розміщені щелепи, шарнірно з'єднані з гідроциліндрами керування, причому втулка і щелепи виконані з однаковими...
Робоче обладнання екскаватора
Номер патенту: 35836
Опубліковано: 10.10.2008
Автори: Любчик Ірина Володимирівна, Ковальов Павло Борисович, Мелашич Василь Васильович, Діденко Леонід Михайлович
МПК: E02F 3/28
Мітки: робоче, обладнання, екскаватора
Формула / Реферат:
Робоче обладнання екскаватора, що містить стрілу та рукоять, неповоротну упорну та керовану щелепи, яке відрізняється тим, що упорна щелепа виконана у вигляді поворотного телескопічного захвата, а керована щелепа складена з двох телескопічних керованих захватів, встановлених з можливістю незалежного один від одного руху та фіксації у просторі.
Захватно-кліщове робоче обладнання екскаватора

Номер патенту: 18605
Опубліковано: 15.11.2006
Автори: Сафонов Володимир Васильович, Семеній Наталія Олександрівна, Мелашич Василь Васильович, Качур Світлана Михайлівна, Рибалка Катерина Анатоліївна
МПК: E02F 3/28
Мітки: робоче, захватно-кліщове, обладнання, екскаватора
Формула / Реферат:
Захватно-кліщове робоче обладнання екскаватора, що містить стрілу, рукоять, неповоротну та гідрокеровану щелепу з шарніром кріплення, яке відрізняється тим, що неповоротна щелепа складена з верхньої та нижньої шарнірно з'єднаних між собою частин з можливістю їх фіксації в необхідному положенні відносно одна одної та оснащених з внутрішнього боку демпферами з губками, а гідрокерована щелепа виконана з можливістю переміщення та фіксації її...
Робоче обладнання маніпулятора
Номер патенту: 20011
Опубліковано: 15.01.2007
Автори: Семеній Наталія Олександрівна, Мелашич Василь Васильович, Кукуюк Оксана Іванівна, Качур Світлана Михайлівна
МПК: E02F 3/28
Мітки: маніпулятора, робоче, обладнання
Формула / Реферат:
Робоче обладнання маніпулятора, що містить рукоять, робочий орган у вигляді шарнірно-зубчатих щелепних кліщів та гідроциліндр керування щелепами, яке відрізняється тим, що зубчаті колеса щелеп за допомогою зубчатих передач з'єднані з зубчатими рейками, змонтованими на штоці гідроциліндра керування щелепами.
Попередній патент: Робоче обладнання екскаватора
Наступний патент: Спосіб зварювання різнорідних металів
Випадковий патент: Спосіб визначення глибини залягання та геометричних параметрів випромінюючих осередків гірських порід