Цифровий оптронний датчик кутового переміщення рульової поверхні літака
Номер патенту: 36500
Опубліковано: 27.10.2008
Автори: Цеховський Максим Володимирович, Кошовий Микола Дмитрович, Оганесян Артем Семенович
Формула / Реферат
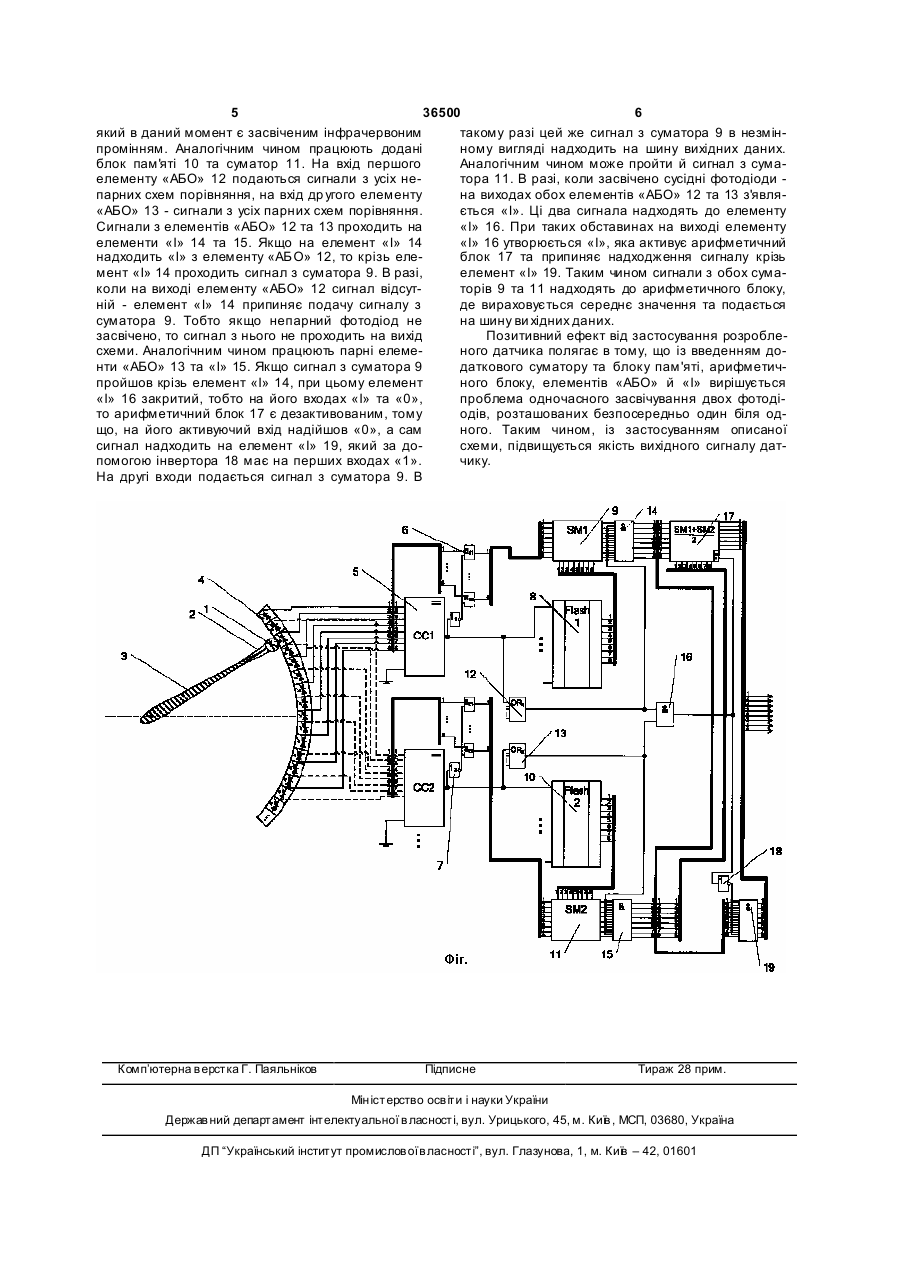
Цифровий оптронний датчик кутового переміщення рульової поверхні літака, що містить ІЧ-діод як випромінювач, затискач для його закріплення, фотодіоди, що реагують на інфрачервоне проміння, які закріплені на тримачі, що являє собою дугу кола, яка окреслюється рульовою поверхнею, з радіусом, що дорівнює довжині рульової поверхні, при цьому дуга кола розташована в площині, перпендикулярній до рульової поверхні літака, фотодіоди з'єднані зі входами електронної схеми обробки сигналів, що містить n схем порівняння, 8n елементів І, перші входи яких під'єднані до відповідних фотодіодів, а другі входи через інвертори з'єднані з виходами схем порівняння, виходи схеми І з'єднані з першими входами суматора, а виходи схем порівняння під'єднані до входів блока пам'яті, виходи якого під'єднані до других входів суматора, який відрізняється тим, що додатково введено блок пам'яті та суматор, до яких підключені виходи з парних схем порівняння та відповідних елементів І, а на існуючий блок пам'яті та суматор підведені виходи з непарних схем порівняння та відповідних елементів І, при цьому фотодіоди з'єднуються з схемами порівняння та відповідними елементами І через один, також додано два елементи АБО, які піключені відповідно до виходів парних та непарних схем порівняння, виходи яких під'єднані до перших входів двох 8-розрядних елементів І, що другими входами підключені до парного та непарного суматорів, крім того виходи з елементів АБО з'єднані зі входами елемента І, вихід якого під'єднано до активуючого входу арифметичного блока, та через інвертор під'єднано до перших входів додаткового 8-розрядного елемента І, другі входи якого з'єднані з виходами двох 8-розрядних елементів І, арифметичний блок під'єднано до виходів двох 8-розрядних елементів І, вихідні сигнали з арифметичного блока та додаткового елемента І під'єднані до шини вихідних даних.
Текст
Цифровий оптронний датчик кутового переміщення рульової поверхні літака, що містить ІЧдіод як випромінювач, затискач для його закріплення, фотодіоди, що реагують на інфрачервоне проміння, які закріплені на тримачі, що являє собою дугу кола, яка окреслюється рульовою поверхнею, з радіусом, що дорівнює довжині рульової поверхні, при цьому дуга кола розташована в площині, перпендикулярній до рульової поверхні літака, фотодіоди з'єднані зі входами електронної схеми обробки сигналів, що містить n схем порівняння, 8n елементів І, перші входи яких під'єднані до відповідних фотодіодів, а другі входи через інвертори з'єднані з виходами схем порівняння, виходи схеми І з'єднані з першими входами сумато U 2 (19) 1 3 36500 4 входів блока пам'яті, виходи якого під'єднані до входи яких з'єднані з відповідними фото діодами, а други х входів суматора, виходи якого є виходами другі входи через інвертор 7 підключені до виходів датчика [висновок про видачу деклараційного пасхем порівняння 5, виходи схем порівняння під'єдтенту на корисну модель від 15.04.2008 нані до адресних входів блоку пам'яті 8, виходи u200802648, МПК (2006) G 01 В 11/26]. якого з'єднані з першими входами суматора 9, а Недоліком такого датчика є відсутність якіснодругі його входи під'єднані до виходів елементів го сигналу датчика при одночасному засвічуванні «І» 6, введено ще один блок пам'яті 10 та суматор фотодіодів, що знаходяться поруч один з одним. 11, до яких підключені виходи з парних схем поріВ основу корисної моделі поставлена задача вняння 5 та відповідних елементів «І», до суматопідвищення якості вихідного сигналу датчика. ру 9 та блоку пам'яті 8 підключені виходи з непарДля досягнення визначеної мети пропонується них схем порівняння 5, при цьому фотодіоди 4 цифровий оптронний датчик кутового переміщенз'єднуються з схемами порівняння 5 та відповідня рульової поверхні літака, що містить ІЧ-діод як ними елементами «І» 6 через один, також два випромінювач, затискач для його закріплення, фоелементи «АБО» 12, 13, які підключені відповідно тодіоди, що реагують на інфрачервоне проміння, до виходів парних та непарних схем порівняння 5, які закріплені на тримачі, що являє собою дугу ковиходи яких під'єднані до перших входів дво х 8ла, яка окреслюється рульовою поверхнею, з радірозрядних елементів «І» 14, 15, що другими вхоусом, що дорівнює довжині рульової поверхні, при дами підключені до парного та непарного суматоцьому дуга кола розташована в площині, перпенрів 9, 11, крім того виходи з елементів «АБО» 12, дикулярній до рульової поверхні літака, фотодіоди 13 з'єднані зі входами елемента «I» 16, вихід якого з'єднані зі входами електронної схеми обробки під'єднано до активуючого входу арифметичного сигналів, що містить n схем порівняння, 8n елемеблоку 17, та через інвертор 18 під'єднано до пернтів "І", перші входи яких під'єднані до відповідних ших входів додаткового 8-розрядного елемента фотодіодів, а др угі входи через інвертори з'єднані «І» 19, другі входи якого з'єднані з виходами двох з виходами схем порівняння, виходи схеми «І» 8-розрядних елементів «І» 14, 15, арифметичний з'єднані з першими входами суматора, а виходи блок 17 під'єднано до виходів двох 8-розрядних схем порівняння під'єднані до входів блока пам'яті, елементів «І» 14, 15, вихідні сигнали з арифметивиходи якого під'єднані до других входів суматора, чного блоку 17 та додаткового елемента «І» 16 в якому згідно з корисною моделю введено два під'єднані до шини вихідних даних. блоки пам'яті та два суматори, до яких підключені Пристрій працює наступним чином. Інфрачервиходи з парних і непарних схем порівняння та воне світло від ІЧ-діоду 1, що закріплений за довідповідних елементів «І», при цьому фотодіоди помогою затискача 2 на рульовій поверхні 3, спряз'єднуються з схемами порівняння та відповідними мовується на фотодіоди 4, що укладені по дузі елементами «І» через один, також додано два кола, що окреслюється рульовою поверхнею, яка елементи «АБО», які підключені відповідно до вивиконує кутовий рух. Фотодіоди при проходженні ходів парних та непарних схем порівняння, виходи крізь них інфрачервоного світла починають пропуяких під'єднані до перших входів дво х 8-розрядних скати електричний сигнал. Електричний сигнал елементів «І», що другими входами підключені до подається на схеми порівняння 5, до кожної з яких парного та непарного суматорів, крім того виходи з під'єднано по вісім фотодіодів. Фотодіоди з'єднуелементів «АБО» з'єднані зі входами елемента ються з схемами порівняння через один. Тобто «І», вихід якого під'єднано до активуючого входу непарні за ліком фотодіоди під'єднано до непарарифметичного блоку, та через інвертор під'єднаних схем порівняння, а парні - до парних схем поно до перших входів додаткового 8-розрядного рівняння. Схема порівняння порівнює сигнал на елемента «І», другі входи якого з'єднані з виходасвоїх входа х з нульовим сигналом і, в разі їх рівноми двох 8-розрядних елементів «І», арифметичний сті, видає на ви ході логічну одиницю. При наявноблок під'єднано до виходів двох 8-розрядних елесті відмінного від нуля сигналу на виході схеми ментів «І», вихідні сигнали з арифметичного блоку порівняння з'являється логічний нуль. Якщо на та додаткового елемента «І» під'єднані до шини виході схеми порівняння знаходиться нуль - це вихідних даних. означає, що рульова поверхня розташована в секВведення двох блоків пам'яті та двох суматоторі дуги, що відповідає даній схемі порівняння. В рів надає можливість сигнали від сусідніх фотодітакому разі сигнал, що проходить через інвертор одів оброблювати окремо, а введення арифмети7, перетворюється на одиницю та відкриває елечного блоку й елементів «І» проводити розрахунок менти «І» 6. Таким чином на виходах восьми елесереднього значення при засвічуванні сусідніх фоментів «І» формується 8-розрядне слово, що потодіодів, таким чином вирішува ти проблему однодається на входи суматора 9. Виходи непарних часного засвічування фотодіодів, що розташовані схем порівняння під'єднуються до адресних входів поруч один з одним. блоку пам'яті 8, в якому містяться 8-розрядні консНа Фіг.зображена функціональна схема цифтанти, кожна з яких відповідає якомусь з секторів рового оптронного датчика кутового переміщення дуги. В залежності від того, який сигнал поступив рульової поверхні літака. на адресні входи блоку пам'яті, на виходи блоку Датчик містить ІЧ-діод 1, який закріплений за пам'яті подається відповідна константа. Виходи допомогою затискача 2 на рульовій поверхні літаблоку пам'яті під'єднані до інших входів суматора. ка 3, фотодіоди 4, що укладені по дузі кола, що Таким чином за допомогою суматора відбувається окреслюється рульовою поверхнею, яка виконує сумування констант, які відповідають значенню кутовий рух, n схем порівняння 5, входи яких під'сектора та 8-розрядному слову, що містить в собі єднані до фотодіодів, 8n елементів «І» 6, перші інформацію про фотодіод з відповідного сектора, 5 36500 6 який в даний момент є засвіченим інфрачервоним такому разі цей же сигнал з суматора 9 в незмінпромінням. Аналогічним чином працюють додані ному вигляді надходить на шину вихідних даних. блок пам'яті 10 та суматор 11. На вхід першого Аналогічним чином може пройти й сигнал з сумаелементу «АБО» 12 подаються сигнали з усіх нетора 11. В разі, коли засвічено сусідні фотодіоди парних схем порівняння, на вхід др угого елементу на виходах обох елементів «АБО» 12 та 13 з'явля«АБО» 13 - сигнали з усіх парних схем порівняння. ється «І». Ці два сигнала надходять до елементу Сигнали з елементів «АБО» 12 та 13 проходить на «І» 16. При таких обставинах на виході елементу елементи «І» 14 та 15. Якщо на елемент «І» 14 «І» 16 утворюється «І», яка активує арифметичний надходить «І» з елементу «АБО» 12, то крізь елеблок 17 та припиняє надходження сигналу крізь мент «І» 14 проходить сигнал з суматора 9. В разі, елемент «І» 19. Таким чином сигнали з обох сумаколи на виході елементу «АБО» 12 сигнал відсутторів 9 та 11 надходять до арифметичного блоку, ній - елемент «І» 14 припиняє подачу сигналу з де вираховується середнє значення та подається суматора 9. Тобто якщо непарний фотодіод не на шину ви хідних даних. засвічено, то сигнал з нього не проходить на вихід Позитивний ефект від застосування розроблесхеми. Аналогічним чином працюють парні елеменого датчика полягає в тому, що із введенням донти «АБО» 13 та «І» 15. Якщо сигнал з суматора 9 даткового суматору та блоку пам'яті, арифметичпройшов крізь елемент «І» 14, при цьому елемент ного блоку, елементів «АБО» й «І» вирішується «І» 16 закритий, тобто на його входах «І» та «0», проблема одночасного засвічування двох фотодіто арифметичний блок 17 є дезактивованим, тому одів, розташованих безпосередньо один біля одщо, на його активуючий вхід надійшов «0», а сам ного. Таким чином, із застосуванням описаної сигнал надходить на елемент «І» 19, який за досхеми, підвищується якість вихідного сигналу датпомогою інвертора 18 має на перших входах «1». чику. На другі входи подається сигнал з суматора 9. В Комп’ютерна в ерстка Г. Паяльніков Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDigital optron indicator of angular displacement of rudder surface of aircraft
Автори англійськоюKoshovyi Mykola Dmytrovych, Ohanesian Artem Semenovych, Tsekhovskyi Maksym Volodymyrovych
Назва патенту російськоюЦифровой оптронный датчик углового перемещения рулевой поверхности самолета
Автори російськоюКошевой Николай Дмитриевич, Оганесян Артем Семенович, Цеховский Максим Владимирович
МПК / Мітки
МПК: G01B 11/26
Мітки: датчик, переміщення, літака, цифровий, рульової, оптронний, кутового, поверхні
Код посилання
<a href="https://ua.patents.su/3-36500-cifrovijj-optronnijj-datchik-kutovogo-peremishhennya-rulovo-poverkhni-litaka.html" target="_blank" rel="follow" title="База патентів України">Цифровий оптронний датчик кутового переміщення рульової поверхні літака</a>
Оптронний датчик кутового переміщення рульової поверхні літака

Номер патенту: 33535
Опубліковано: 25.06.2008
Автори: Оганесян Артем Семенович, Цеховський Максим Володимирович, Кошовий Микола Дмитрович
МПК: G01B 11/26
Мітки: переміщення, літака, кутового, оптронний, поверхні, рульової, датчик
Формула / Реферат:
Оптронний датчик кутового переміщення рульової поверхні літака, що містить випромінювач, затискач для його закріплення та тримач, що являє собою дугу кола, яка окреслюється рульовою поверхнею, з радіусом, що дорівнює довжині рульової поверхні, при цьому дуга кола розташована в площині, перпендикулярній до рульової поверхні літака, який відрізняється тим, що як випромінювач використано ІЧ-діод, а на тримачі закріплено фотодіоди, що реагують на...
Цифровий датчик кутового переміщення рульової поверхні літака

Номер патенту: 36496
Опубліковано: 27.10.2008
Автори: Цеховський Максим Володимирович, Оганесян Артем Семенович, Кошовий Микола Дмитрович
МПК: G01B 11/26
Мітки: поверхні, переміщення, рульової, цифровий, датчик, кутового, літака
Формула / Реферат:
Цифровий датчик кутового переміщення рульової поверхні літака, що містить ІЧ-діод як випромінювач, затискач для його закріплення, фотодіоди, що реагують на інфрачервоне проміння, які закріплені на тримачі, що являє собою дугу кола, яка окреслюється рульовою поверхнею, з радіусом, що дорівнює довжині рульової поверхні, при цьому дуга кола розташована в площині, перпендикулярній до рульової поверхні літака, фотодіоди з'єднані зі входами...
Фотоелектричний датчик кутового переміщення рульової поверхні літака
Номер патенту: 27040
Опубліковано: 10.10.2007
Автори: Оганесян Артем Семенович, Кошовий Микола Дмитрович
МПК: G01B 11/26
Мітки: кутового, рульової, літака, датчик, переміщення, фотоелектричний, поверхні
Формула / Реферат:
Фотоелектричний датчик кутового переміщення рульової поверхні літака, що містить оптично зв'язані випромінювач, світловоди та фотоприймальний блок, який відрізняється тим, що додатково містить затискач для закріплення випромінювача на краю рульової поверхні, а торці світловодів укладені по дузі кола, яке окреслюється рульовою поверхнею, з радіусом, що дорівнює довжині рульової поверхні, при цьому дуга кола розташована в площині,...
Перетворювач кутового переміщення в цифровий код
Номер патенту: 33546
Опубліковано: 15.05.2002
Автори: Нор Олег Віталійович, Світличний Олексій Васильович, Кукуй Костянтин Абрамович, Єрмоленко Анатолій Олександрович, Іпполітов Леонід Іванович, Азін Євген Леонідович
МПК: H03M 1/22, G08C 19/38
Мітки: цифровий, кутового, код, переміщення, перетворювач
Формула / Реферат:
1. Перетворювач кутового переміщення в цифровий код, що містить генератор імпульсів, схему початкового скидання, компаратор, формувачі напруги живлення синусної і косинусної обмоток синусно-косинусного обертового трансформатора (СКОТ) або статорних обмоток сельсина, лічильник, лічильний вхід якого з'єднаний з першим виходом генератора імпульсів, вхід скидання - з виходом схеми початкового скидання, вихід - з входами формувачів напруги...
Декадний датчик кутового переміщення
Номер патенту: 14928
Опубліковано: 15.06.2006
Автори: Поповкін Юрій Матвійович, Сарана Володимир Федорович
МПК: G01L 3/10
Мітки: декадний, кутового, датчик, переміщення
Формула / Реферат:
1. Декадний датчик кутового переміщення, що містить немагнітний диск, на якому розміщені геркони, стрілка з постійним магнітом і магнітною шторкою, який відрізняється тим, що на нерухомому диску встановлені дев'ять пар здвоєних герконів по колу з кутовим зміщенням на 36°, що представляють декаду, геркони через діоди з'єднані з двома сигнальними шинами і чотирма кодовими доріжками для двійково-десяткового кодування чисел, і представляють...
Попередній патент: Спосіб моделювання гострого перитоніту
Наступний патент: Система передачі даних
Випадковий патент: Пристрій для обмотки шнура-основи