Спосіб контролю провідників жорсткого армування шахтних стволів та пристрій для його реалізації
Номер патенту: 42406
Опубліковано: 15.10.2001
Автори: Дідок Анатолій Володимирович, Лопатин Валерій Володимирович, Попов Станіслав Олегович, Радченко Володимир Костянтинович, Шидо Микола Миколайович, Послід Борис Сергійович, Коцеруба Валерій Григорович, Ільїн Сергій Ростиславович, Гавруцький Олександр Юхимович
Формула / Реферат
1. Спосіб контролю провідників жорсткого армування шахтних стволів, що вміщує вимір лобової та бокової поверхонь провідника по всій глибині ствола трьома роликами, який відрізняється тим, що відхилення роликів перетворюють в електричний сигнал, реєструють місце розташування посудини в стволі, нормують та узгоджують електричні сигнали, трансформують на цифрові коди і вводять до ПЕОМ, де порівнюють результати з допустими значеннями і за результатами порівняння здійснюють контроль провідників.
2. Пристрій для контролю провідників жорсткого армування шахтних стволів, що вміщує станину, траверсний вилоподібний тримач з лобовим роликом, горизонтальну вісь та два шарнірно встановлених підпружинених коромисла з боковими роликами, з'єднаними зі станиною, який відрізняється тим, що додатково вміщує три перетворювачі переміщення роликів в електричний сигнал, датчик місця розташування посудини в стволі, формуючий та узгоджуючий блок, причому виходи блока послідовно з'єднані із входом порту ПЕОМ.
Текст
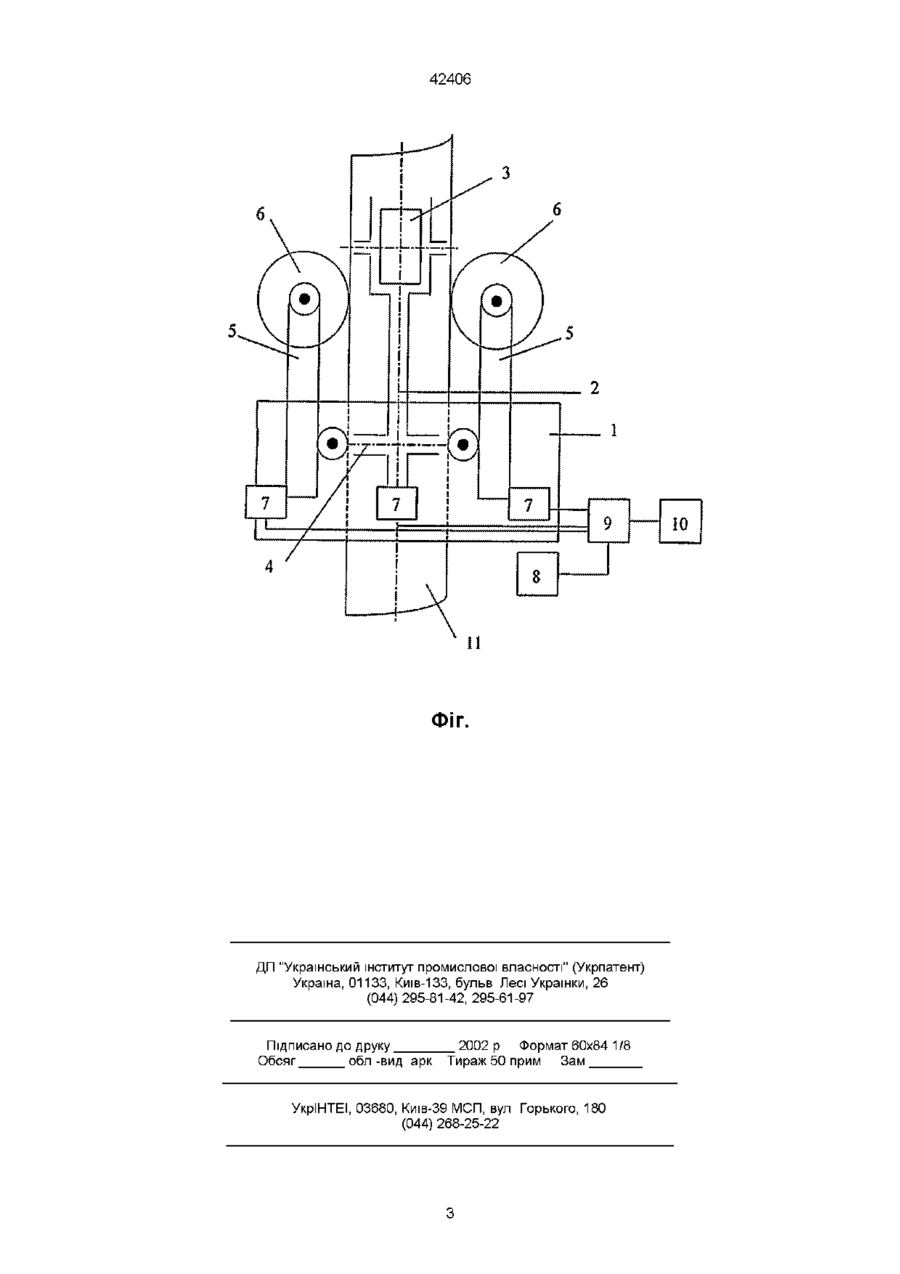
1 Спосіб контролю провідників жорсткого армування шахтних стволів, що вміщує вимір лобової та бокової поверхонь провідника по всій глибині ствола трьома роликами, який відрізняється тим, що відхилення роликів перетворюють в елек тричний сигнал, реєструють місце розташування посудини в стволі, нормують та узгоджують електричні сигнали, трансформують на цифрові коди і вводять до ПЕОМ, де порівнюють результати з допустимими значеннями і за результатами порівняння здійснюють контроль провідників 2 Пристрій для контролю провідників жорсткого армування шахтних стволів, що вміщує станину, траверсний вилоподібний тримач з лобовим роликом, горизонтальну вісь та два шарнірно встановлених підпружинених коромисла з боковими роликами, з'єднаними зі станиною, який відрізняється тим, що додатково вміщує три перетворювачі переміщення роликів в електричний сигнал, датчик місця розташування посудини в стволі, формуючий та узгоджуючий блок, причому виходи блока послідовно з'єднані із входом порту ПЕОМ Винахід стосується шахтного підйому і може знайти застосування в аналогічному транспортному обладнанні У відомому способі, прийнятому за прототип, реалізованому в пристрої, що вміщує в собі вимірювання трьома роликами (одного лобового та двох бокових), які притискаються до ВІДПОВІДНИХ робочих поверхонь провідника, що здійснюється під час руху підйомної посудини по всій глибині ствола [1] До недоліків належить низька достовірність контролю та неможливість автоматизації В основу винаходу поставлено задачу удосконалення способу контролю провідників жорсткого армування шахтних стволів шляхом перетворення відхилень трьох роликів в цифрові коди, реєстрації у ВІДПОВІДНОСТІ до місце розташування в стволі, паралельного вводу цифрових кодів до ПЕОМ, порівняння одержаних результатів з допустимими значеннями, що призводить до підвищення достовірності та автоматизації контролю Поставлена задача вирішується тим, що в засобі контролю провідників жорсткого армування, який вміщує вимірювання лобової та бокової поверхонь провідника по всій глибині ствола трьома роликами, згідно із винаходом, відхилення роликів, перетворюють електричний сигнал, реєструють місце розташування посудини в стволі, нормують та узгоджують електричні сигнали, трансформують в цифрові коди та вводять до ПЕОМ, де порівнюють результати з допустимими значеннями і за результатами порівняння здійснюють контроль провідників Перетворення відхилень роликів в електричний сигнал, його нормування забезпечує можливість підвищення точності і достовірності Перетворення електричних сигналів на цифровий код забезпечує підвищення точності вимірювання даних та автоматизацію їх обробки Реєстрація місця розташування підйомної посудини дозволяє забезпечити адресність вимірювання профілю провідників по глибині ствола і, таким чином, підвищити достовірність контролю стану провідників Порівняння одержаних значень з допустимими в ПЕОМ забезпечує автоматизацію процесу контролю провідників Усі ЦІ ознаки вкупі дозволяють підвищити достовірність і забезпечити автоматизацію контролю Спосіб контролю провідників жорсткого армування здійснюється за допомогою пристрою, блоксхему якого представлено на фігурі, що складається зі станини, підпружиненого траверсного вилкоподібного тримача 2 з лобовим роликом 3, жорстко закріплених на горизонтальній осі 4 та шарнірно поєднаних зі станиною 1, двох шарнірно вста (О о 42406 новлених підпружинених коромисел 5 з боковими роликами 6, закріплених на станині 1, трьох перетворювачів переміщення в електричний сигнал 7, закріплених на траверснім тримачі 2 та коромислах 5, електричного датчика місця розташування 8 Перетворювачі переміщення 7 та датчик місця розташування паралельно електрично зв'язані з нормуючим та узгоджуючим блоком 9, який послідовно з'єднаний з ПЕОМ 10 Ролики 3 та 6 притискаються до ВІДПОВІДНИХ бокових поверхонь 11 провідника Запропонований спосіб здійснюють наступним чином станину 1 встановлюють і жорстко закріплюють на ПІДЙОМНІЙ посудині (СКІПІ, КЛІТІ, противазі так, щоб лобовий 3, бокові 6 ролики надійно притискалися до ВІДПОВІДНИХ робочих поверхонь провідника 11 Також жорстко на ПІДЙОМНІЙ посудині закріплюється датчик місця розташування 8 Датчик місця розташування 8 і перетворювачі переміщення 7 паралельно електрично з'єднують з нормуючим і узгоджуючим блоком 9, який послідовно з'єднують з ПЕОМ 10 За допомогою роликів 3 та 6 під час руху підйомної посудини здійснюють вимір лобової та бокової поверхні жорсткого провідника по всій глибині ствола Одночасно за допомогою датчика місця розташування 8 фіксують точку провідника, де одержано виміри їх електричні сигнали за допомогою паралельного електричного поєднання передаються на нормуючий та узгоджуючий блок 9 В нормуючому та узгоджуючому блоці 9 одержані електричні сигнали нормують, узгоджують, трансформують у цифрові коди, порівнюють з припустимими значеннями і визначають стан провідників в кожній точці по всій глибині ствола У відомому способі, що прийнятий за прототип, реалізованому у пристрої, що вміщує станину, траверсний вилкоподібний тримач з лобовим роликом, горизонтальну вісь та два шарнірно встановлених підпружинених коромисла з лобовими роликами, що поєднані зі станиною [1], недоліком є низька достовірність контролю та неможливість автоматизації В основу винаходу поставлено задачу удосконалення пристрою контролю стану провідників жорсткого армування шахтних стволів шляхом додаткової установки трьох перетворювачів переміщення роликів в електричний сигнал і датчика місця розташування в стволі, електричні виходи яких паралельно поєднані з нормуючим та узгоджуючим блоком, з'єднаним послідовно з ПЕОМ, за ра хунок цього підвищується достовірність та автоматизація контролю В запропонованому пристрої додаткове встановлення трьох перетворювачів переміщення роликів в електричні сигнали забезпечує підвищення достовірності контролю шляхом підвищення точності виміру переміщень Встановлення датчика місця розташування посудини в стволі забезпечує прив'язку даних вимірів переміщень роликів до координати посудини і, таким чином, забезпечує підвищення достовірності контролю провідників Встановлення нормуючого та узгоджуючого блока, його послідовне підключення до входу порту ПЕОМ забезпечує можливість автоматизації процесу контролю шляхом запису та програмної обробки даних в пам'яті ПЕОМ Поставлена задача вирішується шляхом того, що в пристрої, який вміщує станину, траверсний вилкоподібний тримач з лобовим роликом, горизонтальну вісь та два шарнірно встановлених підпружинених коромисла з боковими роликами, поєднаних зі станиною, згідно з винаходом додатково встановлено три перетворювачі переміщення роликів в електричний сигнал та датчик місця розташування в стволі, електричні винаходи яких паралельно з'єднані з нормуючим та узгоджуючим блоком, що з'єднаний послідовно з ПЕОМ Запропонований пристрій працює наступним чином за допомогою роликів 3 та 6 під час руху підйомної посудини, що здійснюють вимір лобової та бокових поверхонь провідника через перетворювачі 7, одержують електричні сигнали, пропорційні відхиленням ВІДПОВІДНОГО ролика Датчик місця розташування 8 виробляє електричний сигнал, що однозначно визначає місце розташування посудини відносно жорсткого провідника Електричні сигнали трьох перетворювачів 7 та датчика місця розташування 8 надходять до формуючого та узгоджуючого блока, де електричні сигнали нормуються, узгоджуються та перетворюються на цифровий код, з яким може працювати ПЕОМ 10, до якого ці коди вводяться ПЕОМ за допомогою обробляючої програми обчислює відхилення одержаних значень вимірів від допустимих Джерела інформації 1 А с СССР №520512 G01C7/06 Пристрій для контролю провідників жорсткого армування шахтних стволів Опубл 05 07 76 Бюл №25 42406 ФІГ. ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Киів-133, бульв Лесі Українки, 26 (044)295-81-42, 295-61-97 Підписано до друку Обсяг обл -вид арк 2002 р Формат 60x84 1/8 Тираж 50 прим Зам УкрІНТЕІ, 03680, Киів-39 МСП, вул Горького, 180 (044) 268-25-22
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and device of inspection of the conductors of rigid reinforcement of pit-shafts
Автори англійськоюHavrutskyi Oleksandr Yukhymovych, Didok Anatolii Volodymyrovych, Il'in Serhii Rostyslavovych, Kotseruba Valerii Hryhorovych, Lopatin Valerii Volodymyrovych, Poslid Borys Serhiiovych, Popov Stanislav Olehovych, Radchenko Volodymyr Kostiantynovych, Shydo Mykola Mykolaiovych
Назва патенту російськоюСпособ контроля проводников жесткого армирования шахтных стволов и устройство для его реализации
Автори російськоюГавруцкий Александр Ефимович, Дидок Анатолий Владимирович, Ильин Сергей Ростиславович, Коцеруба Валерий Григорьевич, Лопатин Валерий Владимирович, Послид Борис Сергеевич, Попов Станислав Олегович, Радченко Владимир Константинович, Шидо Николай Николаевич
МПК / Мітки
МПК: B66B 19/00
Мітки: спосіб, жорсткого, провідників, шахтних, контролю, пристрій, армування, стволів, реалізації
Код посилання
<a href="https://ua.patents.su/3-42406-sposib-kontrolyu-providnikiv-zhorstkogo-armuvannya-shakhtnikh-stvoliv-ta-pristrijj-dlya-jjogo-realizaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб контролю провідників жорсткого армування шахтних стволів та пристрій для його реалізації</a>
Компенсатор осьового зміщення коробчатих провідників жорсткого армування стволів шахт
Номер патенту: 25202
Опубліковано: 30.10.1998
Автор: Мусієнко Володимир Дмитрович
МПК: E21D 7/00
Мітки: осьового, шахт, провідників, жорсткого, армування, зміщення, компенсатор, стволів, коробчатих
Формула / Реферат:
Компенсатор осевого смещения коробчатых проводников жесткой армировки стволов шахт, включающий коробчатый проводник из двух частей, квадратный стержень, помещенный в этих частях проводника, втулки, размещенные на концах стержня и закрепленные в проводниках, одна из которых вместе со стержнем жестко закреплена в одной из частей проводника, хомуты и тарельчатые пружины, установленные на стержне между концами проводников с зазором друг к другу,...
Автоматизована система запису кутів відхілення жорстких провідників вертикальних шахтних стволів
Номер патенту: 21947
Опубліковано: 30.04.1998
Автори: Черняєв Дмитро Миколаєвич, Черняєв Віктор Іванович, Озеров Ілля Федорович
МПК: G01B 7/30
Мітки: відхілення, кутів, стволів, автоматизована, запису, шахтних, вертикальних, провідників, система, жорстких
Формула / Реферат:
Автоматизированная система записи углов отклонения жестких проводников вертикальных шахтных стволов, содержащая последовательно расположенные проекционную оптическую систему, включающую электролампу, конденсор, диафрагму и поворотное зеркало, расположенные последовательно, и датчик углов отклонения про- водников, отличающаяся тем, что в проекционную оптическую систему введены последовательно расположенные плоскопараллельная пластина, два...
Спосіб контролю стану армування стволів, які експлуатуються у зоні деформації породного масиву
Номер патенту: 24970
Опубліковано: 25.12.1998
Автор: Мусієнко Володимир Дмитрович
МПК: E21D 7/00
Мітки: контролю, масиву, стволів, деформації, породного, армування, стану, експлуатуються, спосіб, зони
Формула / Реферат:
1. Способ контроля состояния армировки стволов, эксплуатируемых в зоне деформации породного массива, включающий измерение ширины колеи между проводниками, измерение расстояний между ярусами расстрелов, величины зазоров от выступающих частей подъемного сосуда до элементов армировки, динамических нагрузок, действующих на армировку при движении подъемного сосуда, и измерение механического и коррозионного износа проводников и расстрелов,...
Спосіб ультразвукового контролю виробів у вигляді тіл обертання і пристрій для його реалізації
Номер патенту: 39453
Опубліковано: 15.06.2001
Автори: Погребенник Володимир Дмитрович, Крайківський Ростислав Степанович
МПК: G01N 29/34
Мітки: ультразвукового, контролю, пристрій, реалізації, обертання, виробів, тіл, вигляді, спосіб
Формула / Реферат:
1. Спосіб ультразвукового контролю виробів у вигляді тіл обертання, який полягає у тому, що у виріб випромінюють імпульси ультразвукових коливань у процесі його сканування похилим променем перетворювача, приймають відбиті від дефекта ехо-сигнали і вимірюють їх час надходження ti відносно сигналу зондування, а наявність дефекту визначають при досягненні встановленого значення різницею часів надходження відбитого сигналу у двох послідовних...
Спосіб ультразвукового контролю хімічного складу навколишнього середовища та пристрій для його реалізації
Номер патенту: 33870
Опубліковано: 15.02.2001
Автори: Соченко Петро Степанович, Зубченко Олександр Миколайович, Зеленков Олександр Аврамович
МПК: G01N 29/07, G01N 29/024
Мітки: середовища, реалізації, складу, пристрій, контролю, ультразвукового, хімічного, навколишнього, спосіб
Текст:
...означене прямокутником, приймається приймачем 7, підсилюється підсилювачем 8 та детектирується детектором 9 і надходить до першого входу блока 4 вимірювача затримки. На фіг. 3 показана можлива реалізація блока 4 вимірювання затримки. Імпульс з генератора 1, який формується в момент запуску процесу вимірювань, надходить на другі входи першого 10 та другого 11 тригерів, які переключаються в стан, що відкриває першу 12 та другу 13 схему збігу...
Попередній патент: Фільтруюче завантаження у контактному освітлювачі
Наступний патент: Безконтактна синхронна електрична машина
Випадковий патент: Таблетований противиразковий засіб