Інтегро-диференціатор неелектричних сигналів
Номер патенту: 51744
Опубліковано: 26.07.2010
Автори: Понеділок Володимир Францович, Божок Аркадій Михайлович
Формула / Реферат
Інтегро-диференціатор неелектричних сигналів, що містить вузол приймання вхідних сигналів, дросель і перетворювач, складений із двох співвісних сильфонів, суміжні торці яких з'єднані з рухомим фланцем і встановлені в напрямній, і підсумовуючого механізму, зв'язаного з одним із протилежних торців співвісних сильфонів і рухомим фланцем, причому вихідна ланка підсумовуючого механізму є виходом інтегро-диференціатора, який відрізняється тим, що в ньому додатково встановлений розподільний механізм, вхід якого підключений до виходу вузла приймання вхідних сигналів, а виходи з'єднані з порожниною першого сильфона і через рухомий фланець - з порожниною другого сильфона перетворювача, причому дросель розміщений в плунжері розподільного механізму, який через додатково встановлений двоплечий важіль, рейкову зубчасту передачу і роз'єднувальну муфту зв'язаний з виходом інтегро-диференціатора.
Текст
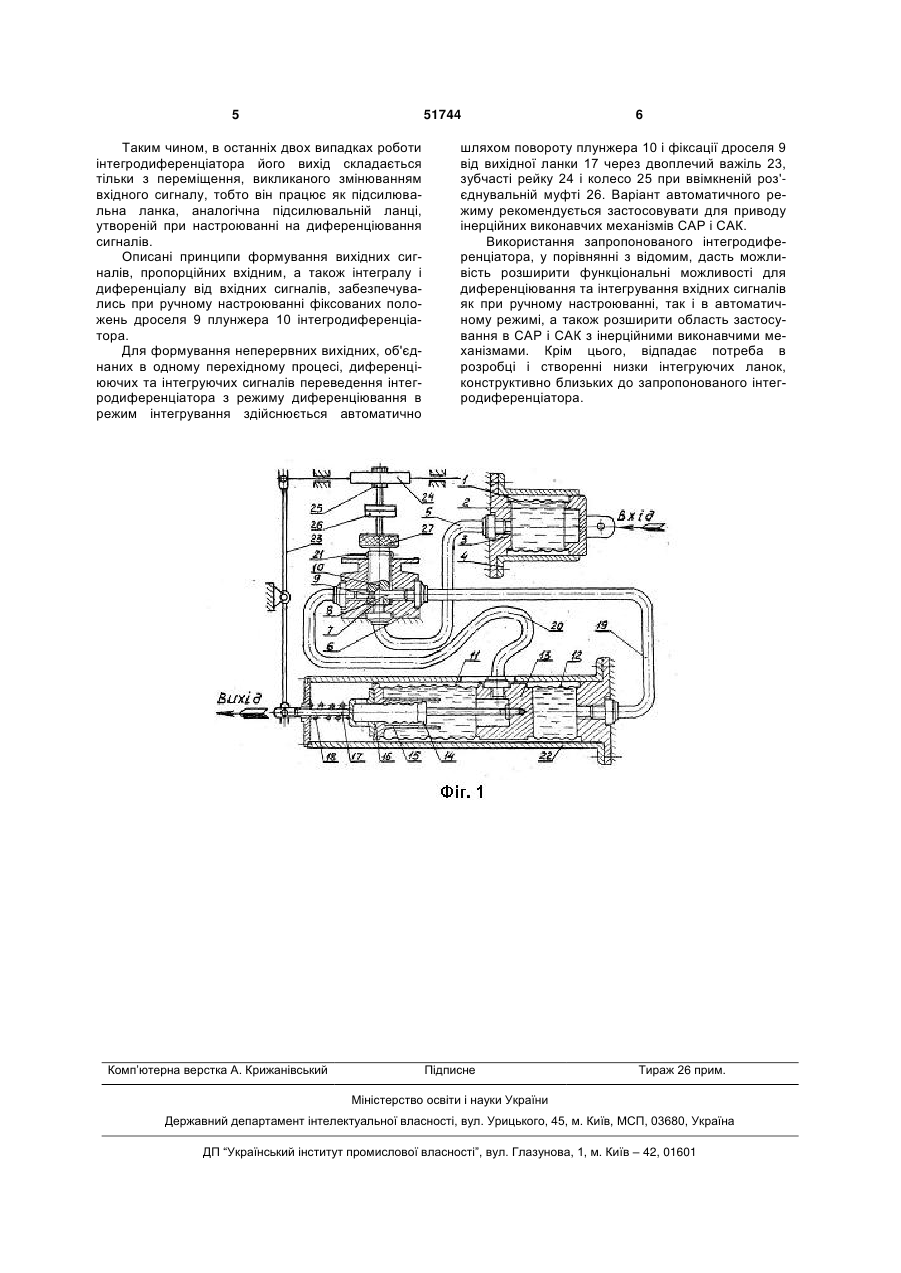
Інтегро-диференціатор неелектричних сигналів, що містить вузол приймання вхідних сигналів, дросель і перетворювач, складений із двох співвісних сильфонів, суміжні торці яких з'єднані з рухомим фланцем і встановлені в напрямній, і підсумовуючого механізму, зв'язаного з одним із 3 чого механізму, який другим торцем з'єднаний з другим рухомим фланцем 16, зв'язаним з вихідною ланкою 17, переміщення якої є вихідним сигналом інтегродиференціатора. Для повернення ланки 17 у вихідне положення і вилучення впливу механічного гістерезису матеріалу стінок сильфона передбачена пружина 18. Робоча рідина із сильфона 1 може поступати в порожнину першого сильфона 12 двома шляхами: через канал в корпусі 6, осьовий отвір 7 і дросель 9 плунжера 10 розподільного механізму та гідро лінію 19, а також через канал в корпусі 6, осьовий 7 і радіальний отвір 8 плунжера 10 і гідролінію 19. В порожнину другого сильфона 11 робоча рідина поступає також двома шляхами: через канал в корпусі 6, осьовий 7 і радіальний 8 отвори плунжера 10 розподільного механізму та гнучку гідро лінію 20, а також через канал в корпусі 6, осьовий отвір 7 і дросель 9 плунжера 10 та гнучку гідролінію 20. Шлях робочої рідини в порожнини сильфонів 11, 12 через дросель 9 плунжера 10, необхідний для настроювання інтегродиференціатора, вказується жорстко зв'язаною з ним стрілкоюпокажчиком 21, розміщеною на дроселі 9. Рухомі деталі перетворювача сигналів переміщуються в напрямній 22, виконаній у вигляді втулки. Фланець 14 сильфона 15 переміщується у втулці рухомого фланця 16. Для автоматичного переведення інтегродиференціатора з режиму інтегрування в режим диференціювання, і навпаки, з одержанням при цьому неперервного інтегродиференціюючого перехідного процесу, вихідна ланка 17 через двоплечий важіль 23 з'єднана із зубчастою рейкою 24, яка перебуває у постійному зачепленні із зубчастим колесом 25, жорстко зв'язаним через роз'єднувальну муфту 26 з плунжером 10. На верхній частині плунжера 10 виконана накатка 27 для ручного переведення інтегродиференціатора. Інтегродиференціатор, послідовно включений в CAP або САК, при диференціюванні сигналів працює наступним чином. При різкому (миттєвому) змінюванні вхідного сигналу через наявність дроселя тиск у сильфоні 12 буде зростати повільніше ніж у сильфоні 11, внаслідок чого рухомий фланець 13 переміститься вправо, переміщаючи за собою рухомий фланець 14 сильфона 15 і створюючи додатковий приріст тиску робочої рідини в сильфоні 11. Рухомий фланець 16 сильфона 11, зв'язаний з ланкою 17 вихідного сигналу, одержить при цьому додаткове переміщення. Отже, будуть додаватися два переміщення, тобто вихід інтегродиференціатора буде складатися з переміщення, викликаного змінюванням вхідного сигналу (переміщення фланця 2 і збільшення внаслідок цього тиску в сильфоні 11), і переміщення, викликаного швидкістю змінювання вхідного сигналу (переміщення фланця 14 і додаткового збільшення внаслідок цього тиску в сильфоні 11). У випадку різкого (миттєвого) звільнення рухомого фланця 2 сильфона 1 інтегродиференціатор буде працювати аналогічно описаному з тією 51744 4 різницею, що вихідні переміщення будуть направлені у протилежний бік. У розглянутих випадках запропонований інтегро-диференціатор працює як підсилювальнодиференціююча ланка. Якщо вхідний сигнал змінюється плавно (повільно), тиск робочої рідини в сильфоні 1 вузла приймальних сигналів змінюється теж повільно. Внаслідок цього перепад тиску в сильфонах 11, 12 практично буде відсутній і рухомі фланці 13, 16, 14 перемістяться вліво з однаковою швидкістю, забезпечуючи при цьому передачу через ланку 17 вихідного сигналу далі на орган виконавчого механізму. У випадку плавного (повільного) звільнення рухомого фланця 2 сильфона 1 інтегродиференціатор працюватиме таким же чином, лише вихідні переміщення будуть направлені в протилежний бік. В останніх двох випадках роботи інтегродиференціатора його вихід складається лише з переміщення, викликаного змінюванням вхідного сигналу, тобто він працює як підсилювальна ланка. Інтегродиференціатор при інтегруванні сигналів працює наступним чином. При різкому (миттєвому) змінюванні вхідного сигналу через наявність дроселя тиск у сильфоні 11 наростатиме повільніше, ніж у сильфоні 12, внаслідок цього рухомий фланець 13 буде переміщуватися вліво, переміщуючи з собою рухомий фланець 14 сильфона 15, створюючи при цьому додаткове розрідження робочої рідини в сильфоні 11. Рухомий фланець 16 сильфона 11, зв'язаний з ланкою 17 вихідного сигналу, одержить при цьому зменшення переміщення. Таким чином буде відніматися два переміщення, тобто вихід інтегродиференціатора буде складатися з переміщення, викликаного змінюванням вхідного сигналу (переміщення фланця 2 і збільшення внаслідок цього тиску в сильфоні 12) мінус переміщення, викликане швидкістю змінювання вхідного сигналу (переміщення фланця 14 і додаткове зменшення внаслідок цього тиску в сильфоні 11). У випадку різкого (миттєвого, звільнення рухомого фланця 2 сильфона 1 інтегродиференціатор працюватиме таким же чином, вихідні переміщення будуть направлені у протилежний бік. В описаних випадках запропонований інтегродиференціатор працює як підсилювальноінтегруюча ланка. При плавному (повільному) змінюванні вхідного сигналу тиск робочої рідини в сильфоні вузла приймальних сигналів буде змінюватися також повільно. Внаслідок цього перепаду тисків у сильфонах 11, 12 практично не буде, отож рухомі фланці 13, 16, 14 перемістяться вліво з однаковою швидкістю, забезпечуючи при цьому передачу через ланку 17 вихідний сигнал далі на орган виконавчого механізму. У випадку плавного (повільного) звільнення рухомого фланця 2 сильфона 1 інтегродиференціатор буде працювати аналогічно описаному з тією різницею, що вихідні переміщення матимуть напрям руху у зворотний бік. 5 51744 Таким чином, в останніх двох випадках роботи інтегродиференціатора його вихід складається тільки з переміщення, викликаного змінюванням вхідного сигналу, тобто він працює як підсилювальна ланка, аналогічна підсилювальній ланці, утвореній при настроюванні на диференціювання сигналів. Описані принципи формування вихідних сигналів, пропорційних вхідним, а також інтегралу і диференціалу від вхідних сигналів, забезпечувались при ручному настроюванні фіксованих положень дроселя 9 плунжера 10 інтегродиференціатора. Для формування неперервних вихідних, об'єднаних в одному перехідному процесі, диференціюючих та інтегруючих сигналів переведення інтегродиференціатора з режиму диференціювання в режим інтегрування здійснюється автоматично Комп’ютерна верстка А. Крижанівський 6 шляхом повороту плунжера 10 і фіксації дроселя 9 від вихідної ланки 17 через двоплечий важіль 23, зубчасті рейку 24 і колесо 25 при ввімкненій роз'єднувальній муфті 26. Варіант автоматичного режиму рекомендується застосовувати для приводу інерційних виконавчих механізмів CAP і САК. Використання запропонованого інтегродиференціатора, у порівнянні з відомим, дасть можливість розширити функціональні можливості для диференціювання та інтегрування вхідних сигналів як при ручному настроюванні, так і в автоматичному режимі, а також розширити область застосування в CAP і САК з інерційними виконавчими механізмами. Крім цього, відпадає потреба в розробці і створенні низки інтегруючих ланок, конструктивно близьких до запропонованого інтегродиференціатора. Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюNonelectric signal integro-differentiator
Автори англійськоюBozhok Arkadii Mykhailovych, Ponedilok Volodymyr Frantsovych
Назва патенту російськоюИнтегро-дифференциатор неэлектрических сигналов
Автори російськоюБожок Аркадий Михайлович, Понедилок Владимир Францевич
МПК / Мітки
МПК: G06C 5/00
Мітки: неелектричних, інтегро-диференціатор, сигналів
Код посилання
<a href="https://ua.patents.su/3-51744-integro-diferenciator-neelektrichnikh-signaliv.html" target="_blank" rel="follow" title="База патентів України">Інтегро-диференціатор неелектричних сигналів</a>
Диференціатор неелектричних сигналів
Номер патенту: 51414
Опубліковано: 12.07.2010
Автори: Понеділок Володимир Францович, Божок Аркадій Михайлович
МПК: G06G 5/00
Мітки: диференціатор, сигналів, неелектричних
Формула / Реферат:
Диференціатор неелектричних сигналів, що містить два сильфони, з'єднані один з одним торцями основним спільним рухомим фланцем і встановлені в напрямній, вузол прийому вхідних сигналів, зв'язаний через дросель з першим сильфоном і через рухомий фланець - з другим сильфоном за допомогою гнучкого шланга, другий торець другого сильфона з'єднаний з другим рухомим фланцем, підсумовуючий механізм, виконаний у вигляді сильфона в напрямній втулці і...
Диференціатор сигналів систем автоматики неелектричного типу
Номер патенту: 31153
Опубліковано: 25.03.2008
Автори: Понеділок Вадим Віталійович, Божок Аркадій Михайлович
Мітки: сигналів, систем, типу, неелектричного, диференціатор, автоматики
Формула / Реферат:
Диференціатор сигналів систем автоматики неелектричного типу, що містить підсумовуючий важіль, вузол приймання вхідних сигналів, з'єднаний через дросель з першим сильфоном перетворювача і безпосередньо - з другим сильфоном, жорстко з'єднаним з першим сильфоном через фланець, зв'язаний тягою з одним із кінців підсумовуючого важеля, а сильфони перетворювача і вузла приймання вхідних сигналів розміщені в циліндричних напрямних втулках, жорстко...
Комбінований диференціатор
Номер патенту: 31232
Опубліковано: 25.03.2008
Автори: Понеділок Володимир Францович, Божок Аркадій Михайлович
МПК: G06G 5/00
Мітки: комбінований, диференціатор
Формула / Реферат:
Комбінований диференціатор, що містить підсумовуючий механізм, два сильфони, з'єднані один з одним торцями рухомим фланцем і установлені в напрямній, і вузол приймання вхідних сигналів, зв'язаний через дросель з першим сильфоном і через рухомий фланець з другим сильфоном за допомогою гнучкого шланга, другий торець другого сильфона з'єднаний з другим рухомим фланцем, при цьому підсумовуючий механізм виконаний у вигляді сильфона, розміщеного...
Гідравлічний пристрій для інтегрування сигналів
Номер патенту: 51394
Опубліковано: 12.07.2010
Автор: Божок Аркадій Михайлович
Мітки: пристрій, інтегрування, сигналів, гідравлічний
Формула / Реферат:
Гідравлічний пристрій для інтегрування сигналів, що містить корпус, підсумовуючий важіль, вузол приймання вхідних сигналів, перетворювач сигналів і дросель, зв'язані з корпусом, причому вузол приймання вхідних сигналів з'єднаний через дросель з першим сильфоном перетворювача і безпосередньо з другим сильфоном, жорстко з'єднаним з першим сильфоном через рухомий фланець, який разом із вільним фланцем другого сильфона зв'язаний за допомогою тяг...
Гідропневмомеханічний диференціатор
Номер патенту: 41555
Опубліковано: 25.05.2009
Автори: Божок Аркадій Михайлович, Понеділок Володимир Францович
Мітки: гідропневмомеханічний, диференціатор
Формула / Реферат:
Гідропневмомеханічний диференціатор, що містить підсумовуючий важіль з вихідною тягою, вузол приймання вхідних сигналів, з'єднаний через дросель з першим сильфоном і безпосередньо - з другим сильфоном через фланець, зв'язаний тягою з одним із кінців підсумовуючого важеля, а перший і другий сильфони і вузол приймання вхідних сигналів розміщені в циліндричних напрямних втулках, жорстко зв'язаних з нерухомими фланцями, другий сильфон через...
Попередній патент: Спосіб визначення наявності алергенів тарганів у приміщенні
Наступний патент: Спосіб отримання електроенергії при безшахтній газифікації та/або спаленні вугільних пластів
Випадковий патент: Спосіб нейропротекції при проведенні каротидної ендартеректомії