П’єзогідравлічний пристрій регулювання жорсткості пружного еластомерного елемента
Номер патенту: 52666
Опубліковано: 10.09.2010
Автори: Квасніков Володимир Павлович, Кулик Микола Сергійович, Харченко Володимир Петрович, Ільченко Володимир Миколайович, Передерко Анатолій Леонтійович
Формула / Реферат
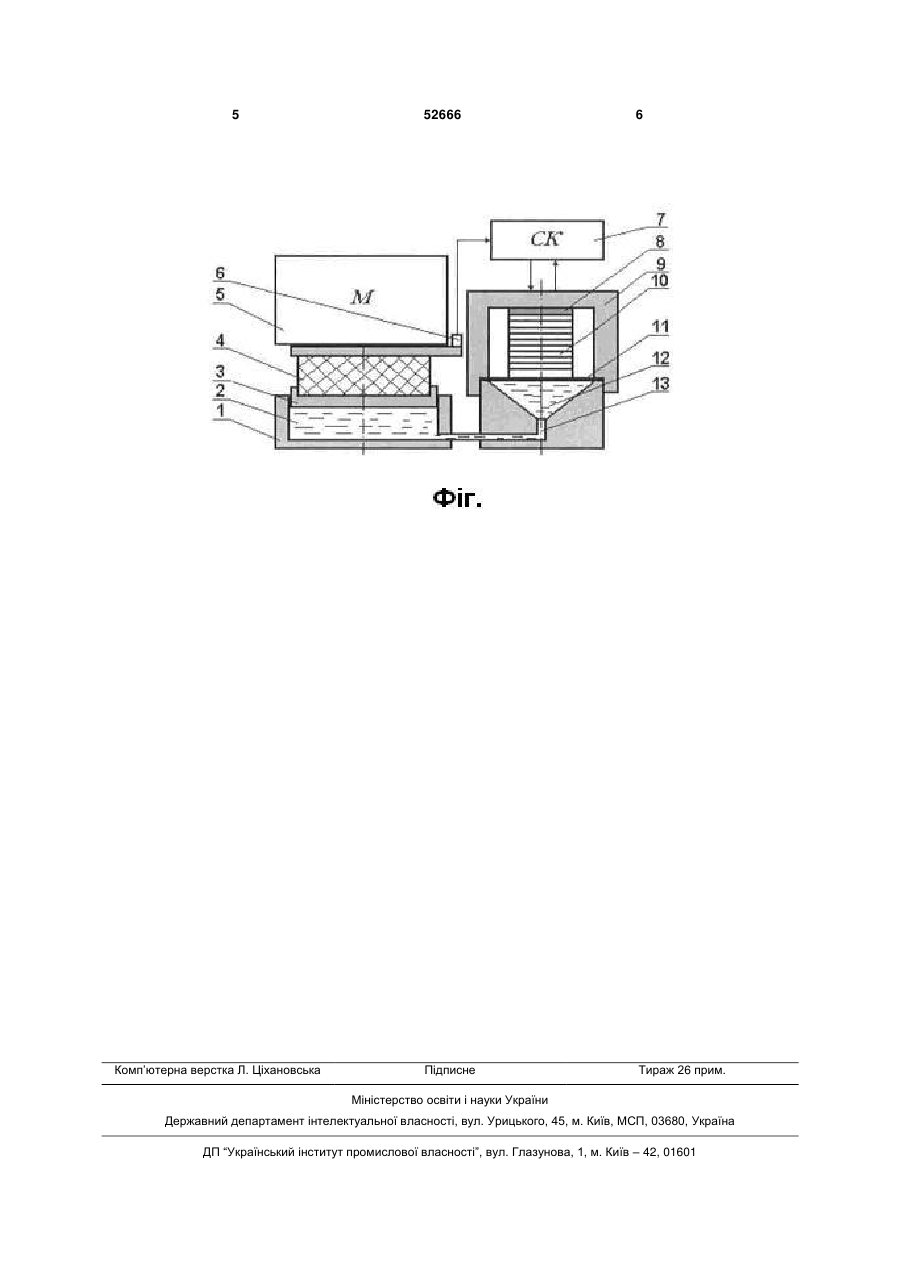
П'єзогідравлічний пристрій регулювання жорсткості пружного еластомерного елемента, що містить гідравлічну камеру, розміщену на опорній підставі з пружним елементом, датчиком частоти та об'єктом захисту, який відрізняється тим, що в як регулятор тиску застосовують п'єзогідравлічний пристрій, а також датчик частоти та датчик тиску, які використовуються системою керування для визначення частоти власних коливань об'єкта захисту і формування сигналу керування та подачі його на регулятор тиску в корпусі, який створює через мембрану тиск на гідравлічну камеру, що через гідравлічну магістраль з'єднана з гідравлічною камерою в опорній підставі та приводить в рух поршень, який підтискає пружний еластомерний елемент, змінюючи його жорсткість і, таким чином, частоту власних коливань об'єкта захисту.
Текст
П'єзогідравлічний пристрій регулювання жорсткості пружного еластомерного елемента, що містить гідравлічну камеру, розміщену на опорній 3 гідравлічну камеру, що через гідравлічну магістраль з'єднана з гідравлічною камерою в опорній підставі та приводить в рух поршень, який підтискає пружний еластомерний елемент змінюючи його жорсткість і, таким чином, частоту власних коливань об'єкта захисту. У заявленому п'єзогідравлічному пристрої регулювання жорсткості пружного еластомерного елемента, для збільшення переміщень поршня можливо застосувати декілька камер з п'єзоприводами, з'єднавши їх гідравлічними магістралями з камерою, в якій він знаходиться. Зазначені ознаки корисної моделі є істотними, тобто впливають безпосередньо на результат, що може бути отриманий при здійсненні корисної моделі. На кресленнях схематично зображений п'єзогідравлічний пристрій регулювання жорсткості пружного еластомерного елемента (Фіг.). П'єзогідравлічний пристрій регулювання жорсткості пружного еластомерного елемента має у своєму складі: опорну підставу 1, де розміщена гідравлічна камера 2 з поршнем 3. На камеру встановлюється пружний еластомерний елемент 4 з об'єктом захисту 5 та датчиком частоти 6. Тиск рідини у гідравлічній камері 2 регулюється системою керування 7 через регулятор тиску (п'єзопривід) 10, датчик тиску 8 та мембрану 11, які знаходяться в корпусі 9 та регулюють рівень рідини в гідравлічній камері 12, що за допомогою гідравлічної магістралі 13 з'єднана з гідравлічною каме рою 2. Пристрій працює наступним чином: попередньо встановлюють необхідну номінальну жорсткість пружного елемента 4 за рахунок його підтиску поршнем 3 за рахунок тиску рідини, що подається до камери 2 в підставі 1 з камери 12 за допомогою регулятора 10, через гідравлічну магістраль 13. Керований системою керування регулятор тиску 10 утримує тиск рідини в камерах 2 і 12. Жорсткість пружного еластомерного елемента 4, а виходить, і частота власних коливань об'єкта захисту 5 пропорційні ступеню підтиску пружного елемента 4 та величині тиску рідини в камері 2. Величина тиску рідини в камері 12 виміряється датчиком тиску 8 і надходить до системи керування 7, яка по величині тиску P=Mq 52666 4 де: М - маса об'єкту захисту 5, q - прискорення вільного падіння визначає відповідне значення частоти власних коливань об'єкта захисту 5: k , M де k - жорсткість пружного еластомерного елемента 4. Змушені коливання об'єкта захисту виміряються датчиком частоти 6. Обмірюване значення частоти змушених коливань передається в систему керування 7, у якій виробляється сигнал, обернено пропорційний по величині різниці квадратів частот вимушених і власних коливань 0 об'єкта захисту 5: D , f 2 2 0 де D - коефіцієнт пропорційності, у якому здійснюється логічний аналіз величини сигналу f. Якщо він менше деякого граничного значення, ffПОР, то видається сигнал керування регулятором тиску 10, що, залежно від знака вхідного сигналу f, підвищує, або знижує тиск рідини в гідравлічній камері 12. Якщо сигнал f позитивний, то подається команда на зниження тиску, зменшення підтиску пружного елемента 4, збільшення його жорсткості k і в результаті збільшення частоти власних коливань 0 об'єкта захисту 5 до виконання умови f>fПОР. Якщо сигнал негативний, то подається команда на підвищення тиску в гідравлічній камері 12, збільшення підтиску пружного еластомерного елемента 4, зменшення його жорсткості k і в результаті зменшення частоти власних коливань 0 об'єкта 5 до виконання умови f
ДивитисяДодаткова інформація
Назва патенту англійськоюPiezohydraulic control device for rigidity of springy elastomeric element
Автори англійськоюKulyk Mykola Serhiiovych, Kharchenko Volodymyr Petrovych, Kvasnikov Volodymyr Pavlovych, Perederko Anatolii Leontiiovych, Ilchenko Volodymyr Mykolaiovych
Назва патенту російськоюПьезогидравлическое устройство жесткости упругого эластомерного элемента
Автори російськоюКулик Николай Сергеевич, Харченко Владимир Петрович, Квасников Владимир Павлович, Передерко Анатолий Леонтьевич, Ильченко Владимир Николаевич
МПК / Мітки
МПК: G05D 19/00, F16F 15/00
Мітки: п'єзогідравлічний, пружного, пристрій, елемента, регулювання, жорсткості, еластомерного
Код посилання
<a href="https://ua.patents.su/3-52666-pehzogidravlichnijj-pristrijj-regulyuvannya-zhorstkosti-pruzhnogo-elastomernogo-elementa.html" target="_blank" rel="follow" title="База патентів України">П’єзогідравлічний пристрій регулювання жорсткості пружного еластомерного елемента</a>
Спосіб регулювання жорсткості оболонкового амортизатора
Номер патенту: 74786
Опубліковано: 15.02.2006
Автор: Величкович Андрій Семенович
МПК: F16F 1/02
Мітки: жорсткості, амортизатора, спосіб, оболонкового, регулювання
Формула / Реферат:
Спосіб регулювання жорсткості оболонкового амортизатора, що включає виконання розрізу на оболонці і монтаж оболонки обертання, який відрізняється тим, що розріз виконують під кутом до твірної оболонки так, що розгортка оболонки набуває вигляду паралелограма, при цьому для забезпечення максимального значення жорсткості внутрішній гострий кут його дорівнює 45°, а для забезпечення проміжного значення жорсткості цей кут вибирають з інтервалу 45°...
Пристрій для регулювання пружистого елемента аксіально-плунжерної гідромашини
Номер патенту: 3376
Опубліковано: 27.12.1994
Автори: Баркар Олександра Митрофанівна, Салтан Сергій Семенович, Нагорний Олександр Григорович, Смірнов Євген Феліксович, Ткаченко Валентин Олександрович, Качанов Юрій Федорович
МПК: F04B 51/00, F04B 1/20
Мітки: аксіально-плунжерної, елемента, гідромашини, пристрій, регулювання, пружистого
Формула / Реферат:
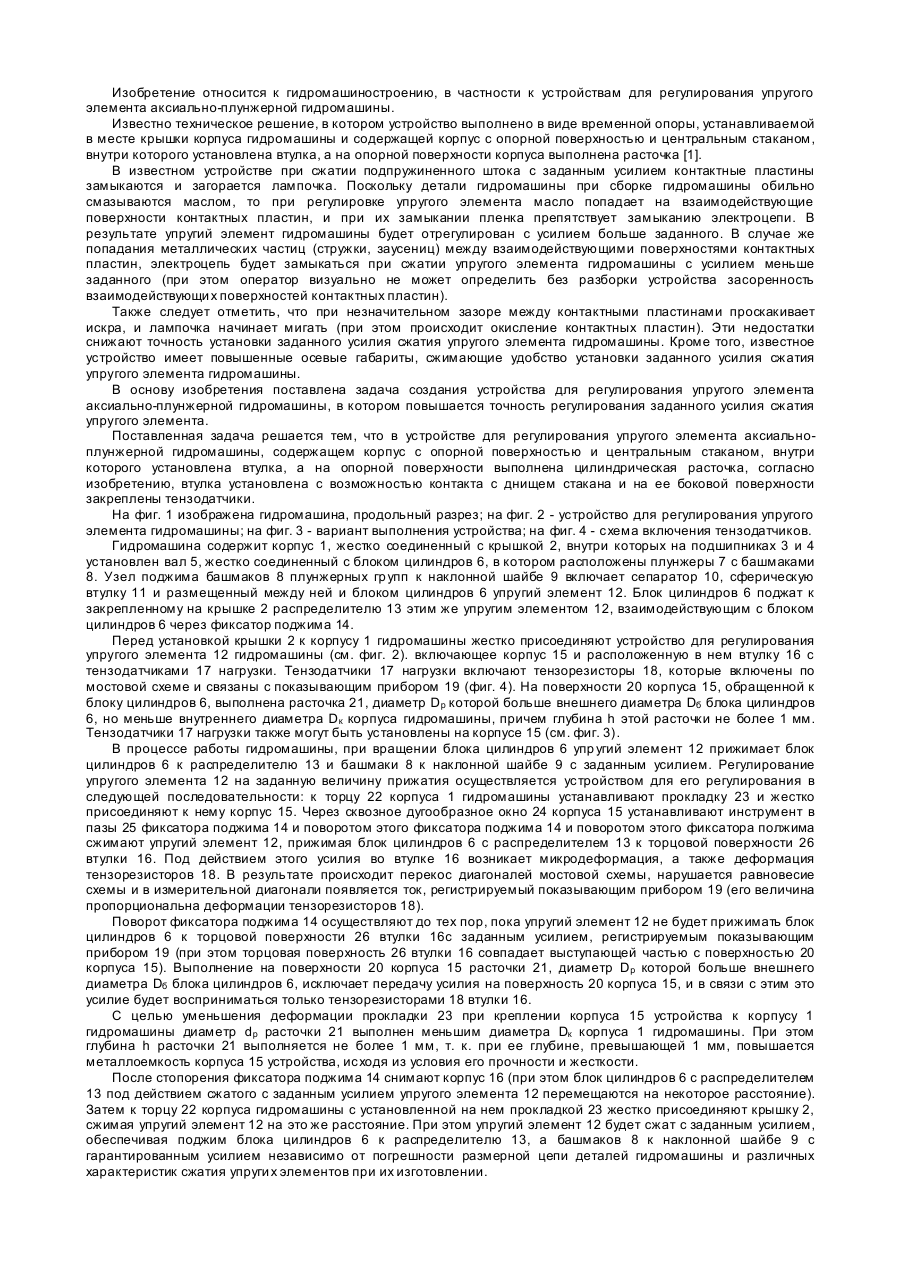
Устройство для регулирования упругого элемента аксиально-плунжерной гидромашины, содержащее корпус с опорной поверхностью и центральным стаканом, внутри которого установлена втулка, а на опорной поверхности корпуса выполнена цилиндрическая расточка, отличающееся тем, что втулка установлена с возможностью контакта с днищем стакана и на ее боковой поверхности закреплены тензодатчики.
Пристрій для контролю жорсткості текстильних ниток
Номер патенту: 50881
Опубліковано: 25.06.2010
Автори: Боярчук Володимир Петрович, Якимчук Сергій Георгійович, Якимчук Георгій Сергійович
МПК: G01N 3/32
Мітки: ниток, текстильних, контролю, пристрій, жорсткості
Формула / Реферат:
Пристрій для контролю величини жорсткості текстильних ниток, що містить виконавчий пристрій, вимірювальний блок, обчислювач жорсткості, який містить фільтр і вимірювач амплітуди, з'єднаний із блоком ділення, який відрізняється тим, що він містить кулачковий барабанчик, що обертається від мікроелектродвигуна, перетворювач сили тиску текстильних ниток на барабанчик в електричний сигнал, підсилювач цього сигналу, навантаженням якого є фільтр...
Пристрій для збільшення жорсткості одностороннього рейкового провідника
Номер патенту: 40111
Опубліковано: 16.07.2001
Автори: Рубель Андрій Олександрович, Рубель Олександр Васильович, Рубель Володимир Олександрович
МПК: E21D 7/00
Мітки: рейкового, одностороннього, пристрій, жорсткості, провідника, збільшення
Формула / Реферат:
Пристрій для збільшення жорсткості одностороннього рейкового провідника, який містить "несправжній" провідник повернений основою до основи робочого провідника, звернені одна до одної скоби пов'язані між собою стяжним болтом, який відрізняється тим, що скоби у верхній частині виконані сполученими між собою, на внутрішніх поверхнях яких, у зоні сполучення виконана посадкова виїмка, що повторює форму "несправжнього"...
Пристрій для приєднання трубопроводу з циркулюючою рідиною до вогнетривкого елемента та вузол вогнетривкого елемента
Номер патенту: 81653
Опубліковано: 25.01.2008
Автори: Рішар Франсуа-Ноель, Руффальді Альдо
МПК: F16B 13/06, B22D 41/50
Мітки: вузол, рідиною, пристрій, елемента, трубопроводу, вогнетривкого, приєднання, циркулюючою
Формула / Реферат:
1. Пристрій для приєднання трубопроводу з циркулюючою рідиною (6) до вогнетривкого елемента (1), який має циліндричну розточку (5), що містить прокладку (14), призначену для розміщення у розточці, та перший опорний елемент (13), що стискає прокладку ззовні розточки, який відрізняється тим, що він містить другий опорний елемент (9b), виконаний з можливістю введення у розточку для утворення прошарування прокладки (14) з першим опорним елементом...
Попередній патент: Нижньощелепний вузол ендопротеза скронево-нижньощелепного суглоба
Наступний патент: Змішувальна секція черв’яка екструдера
Випадковий патент: Пристрій для дефектоскопії сталевих канатів