Спосіб акустичного зондування атмосфери
Формула / Реферат
Спосіб акустичного зондування атмосфери, що полягає в випромінюванні в атмосферу на певній робочій частоті акустичних синусоїдальних коливань, прийомі на цій частоті акустичних коливань, розсіяних на природних неоднорідностях атмосфери, вимірі параметрів розсіяного сигналу, обчисленні параметрів атмосфери за виміряними значеннями параметрів розсіяного сигналу, який відрізняється тим, що попередньо аналізують розподіл за частотою зовнішніх акустичних перешкод в межах обраного частотного діапазону, визначають частоту, на якій рівень перешкод має найменше значення, і випромінюють на цій частоті зондувальні акустичні коливання.
Текст
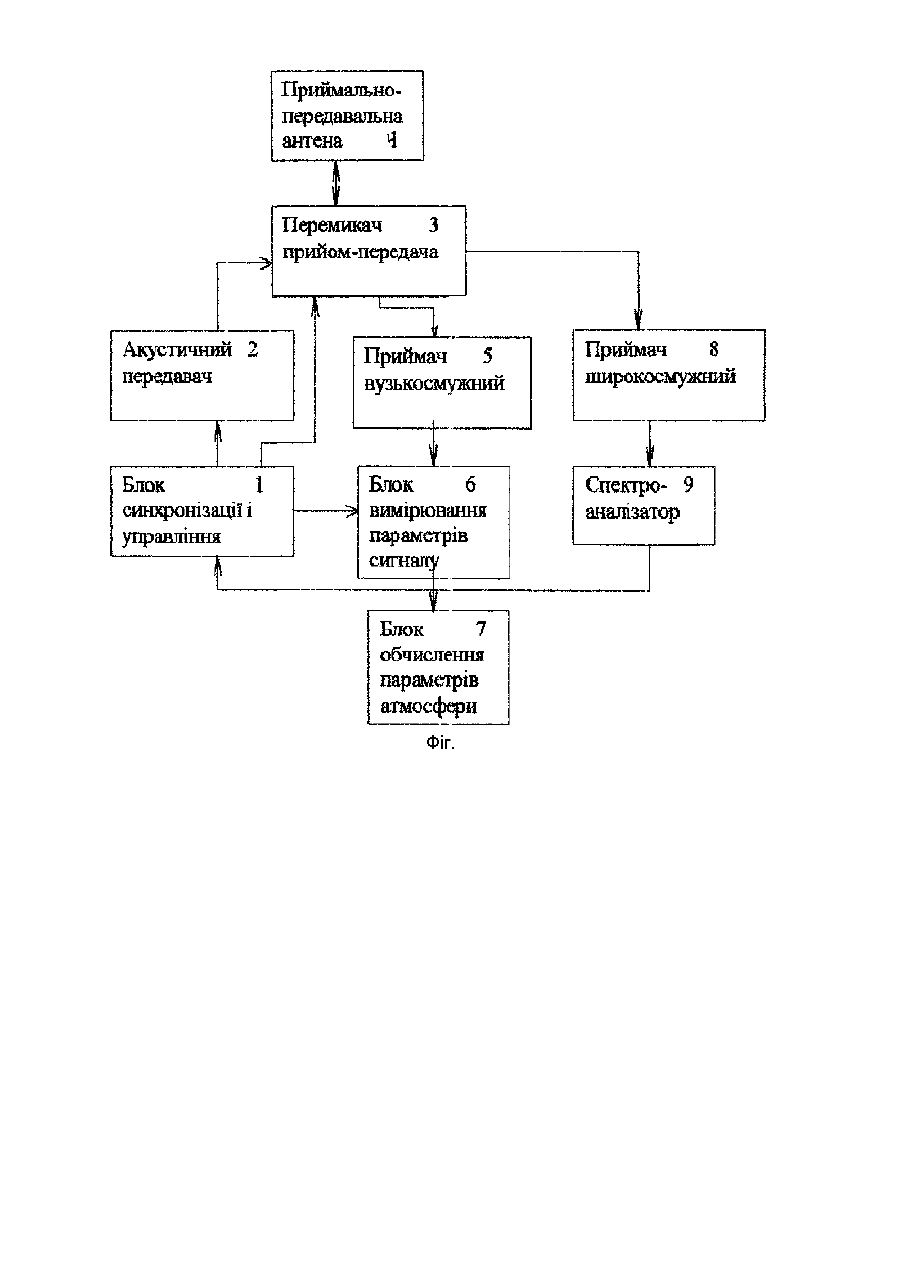
Винахід відноситься до метеорології, а саме до акустичних засобів визначення параметрів атмосфери, і може бути використаний при метеорологічному забезпеченні злітання і посадки літаків, а також при прогнозуванні метеорологічних ситуацій, що призводять до підвищеної концентрації забруднень в приземному шарі атмосфери. Відомо, є спосіб вимірювання параметрів атмосфери за кутом приходу розсіяної хвилі (Красненко Н.П. Акустическое зондирование атмосфери, Новосибирск, Наука, 1986, С. 108 - 112), що полягає на випромінюванні в атмосферу акустичних коливань, розсіюванні акустичних коливань на неоднорідностях атмосфери і прийомі розсіяного сигналу. Параметри атмосфери визначають за результатами вимірювання параметрів розсіяного сигналу. Тут фактично вимірюється середня різниця фаз сигналів, які реєструються в різних точках апертури антени, а кут прибуття хвилі оцінюється за формулою, де величина середньої різниці фаз виражена як функція метеопараметрів атмосфери. Наведена формула при моностатичній схемі зондування. Відзначається, що вимірювання різниці фаз сигналів акустичним локатором дозволяють оцінити за пеленгаційною формулою кут прибуття хвилі тільки з точністю першого наближення за ступенем збурення показника заломлення. Звідси, даний спосіб не має достатньо високої точності вимірювання параметрів атмосфери внаслідок сильного впливу зовнішнього шумового поля. Найбільш близьким за технічною суттєвістю і задачі, що вирішується запропонованим винаходом, є акустичний доплерівский спосіб визначення швидкості вітру (Красненко Н.П., Акустическое зондирование атмосферы, Новосибирск, Наука, 1986, С. 105 - 108). Він полягає у випромінюванні в атмосферу акустичних коливань з деякою фіксованою частотою f u, прийомі акустичних коливань, розсіяних на природних неоднорідностях атмосфери, які рухаються під впливом вітру, вимірюванні доплеровского зсуву частоти розсіяного сигналу і обчисленні швидкості вітру. Якщо випромінювання і прийом коливань виконуються з однієї точки, то швидкість вітру обчислюється за формулою c V= fд 2 fи де с - швидкість звуку; f д = f п - f и - доплерівский зсув частоти; f п - центральна частота сигналу, що приймається; f и - частота випромінюваних коливань. Отже величина V - повністю визначається fд. Основним фактором, що обмежує точність вимірювання швидкості вітру і максимальну дальність дії вказаного способу є вплив зовнішніх акустичних перешкод. Зменшення впливу зовнішніх шумів, що діють з напрямків, відмінних від напрямку зондування (тобто що діють по бокових пелюстках діаграми спрямованості) не дасть позитивного результату, а також не захищає від перешкод, що співпадають з напрямками, близькими до напрямку зондування (що потрапляють в основну пелюстку діаграми спрямованості). З перешкодами, що потрапляють на вхід приймача і що влучають в смугу частот, яку займає корисний сигнал, боротися надзвичайно важко. Ефективних засобів боротьби з такими завадами не існує. Найбільш простою і достатню повною характеристикою якості роботи відомих способів акустичного зондування є відношення середніх потужностей сигналу і шуму в точці прийому у смузі частот, що займає сигнал (Красненко H.П. Акустическое зондирование атмосферы, Новосибирск, Наука, 1986, С. 30; С. 34; С. 53). В основу винаходу поставлено задачу підвищення дальності зондування і точності виміру параметрів атмосфери шляхом концентрації енергії зондувального сигналу у частинах спектру з найменшим рівнем зовнішніх перешкод. Ця задача розв'язана таким шляхом. У способі акустичного зондування атмосфери, що полягає у випромінюванні в атмосферу на довільній робочій частоті акустичних синусоїдальних коливань і прийомі на цій частоті акустичних коливань, розсіяних на неоднорідностях атмосфери, вимірі параметрів розсіяного сигналу, обчисленні параметрів атмосфери за зміряними значеннями параметрів розсіяного сигналу, попередньо виконують аналіз розподілу по частоті зовнішніх акустичних перешкод в межах вибраного частотного діапазону, визначають частоту, на який рівень перешкод має найменше значення і випромінюють на цій частоті зондувальні акустичні коливання. Позитивний результат може бути досягнуто внаслідок того, що враховується рівень і розподіл по частоті зовнішніх акустичних перешкод, які характеризуються значною мінливістю, і породжуються головним чином змінами в домінуючих джерелах шумів та умовами розповсюдження звукових хвиль. Невизначеність як різниця між середньою оцінкою і рівнем шуму, що одержуються при короткочасних вимірах на конкретній частоті, складає 8...20дБ. Розміщення енергії зондуючого сигналу на частотах з найменшим рівнем перешкод дозволяє підвищити імовірність задовільної (за відношенням сигнал-шум) роботи і суттєво покращити реальну чутливість системи. Якщо ширина спектра зондувального сигналу складає Df то діапазон частот DF, в якому працює акустичний локатор, можна поділити на n незалежних каналів n = DF / Df. Тоді імовірність задовільної роботи акустичного локатора в умовах перешкод визначається імовірністю в наявності серед n незалежних частотних каналів хоча б одного каналу з потрібними характеристиками В = 1 - (1 - Р)n (1) де Ρ - імовірність того, що один довільно взятий і - канал виявиться вільним від завад; (1 - Ρ) імовірність того? що канал буде "зайнятий" завадами. Так, якщо тривалість зондувального імпульсу tu = 1 DF 100 Df = = 10Гц n= = 10 = 10 tu Df 100мс (0,1с), то . При Р = 0,1 i n = 10 згідно з (1) , і при DF = 100Гц, маємо маємо В = 0,65; при Р = 0,1 n = 50 - отримаємо В = 0,9948. Розміщення енергії зондувального сигналу на частоті з найменшим рівнем перешкод дозволяє зменшити рівень завад від значення U1 до значення U2. Виграш в реальній чутливості, виміряний в децибелах, оцінюється за формулою U1 (2) U2 де U1 - рівень перешкод, що відповідає імовірності Р; U2 - рівень перешкод, що відповідає імовірності DU = 201g В. Закон розподілу рівнів акустичних завад для будь-якої випадково вибраної частоти являє собою логарифмічно нормальний розподіл [Красненко Η. Π. Акустическое зондирование атмосфери, Новосибирск, Наука, 1986 С. 41], який може бути досить точно апроксимовано експоненційно-гіперболічним розподілом Фреше a é 0ù (3) P(U) = P0 ê U ú ë û де U0, Р0 - значення аргументу і функції, що визначають хід залежності; a - параметр розподілу, що визначає розкид значень випадкової величини. Чим менше значення a, тим менші флуктуації (мінливість) перешкод в каналах. Якщо виразити величини U1 і U2 через відповідні імовірності у відповідності з (3) і підставити результати в (2), то одержується формула для оцінки виграша в реальній чутливості 20 lg P lg DU = (4) a lg 1 - (1 - P )n U [ ] Так, для значення a = 2, яке відповідає середній мінливості акустичних завад, Р = 0,1, кількості каналів n = 10 очікуваний виграш складає DU = 7дБ, При n = 20 виграш DU = 12,5дБ, при n = 50 виграш DU = 26дБ. На рисунку (фіг.) зображена структурна схема пристрою, що реалізує запропонований спосіб. Пристрій містить блок 1 синхронізації і управління, вхід якого зв'язаний зі спектроанализатором 9, один вихід - з акустичним передавачем 2, другий - з блоком 6 виміру параметрів сигналу, а третій вихід зв'язаний з перемикачем 3 прийом-передача, який також підключено до акустичного передавача 2, приймальнопередавальної антени 4, що через перемикач прийом-передача зв'язана зі входом приймача 5 вузькосмужного і входом приймача 8 широкосмугового, вихід якого зв'язаний зі входом спектроаналізатора 9, вихід приймача 5 вузькосмужного зв'язаний зі входом блоку 6 виміру параметрів сигналу, вихід якого підключено до блоку 7 обчислення параметрів атмосфери. Пристрій працює так. За сигналом блоку 1 синхронізації і управління перемикач 3 прийом-передача підключає приймальнопередавальну антену 4 до приймача широкосмугового 8. В спектроаналізаторі 9 виконується аналіз розподілу по частоті зовнішніх акустичних перешкод, що надходять в даний момент часу на вхід антени в частотному діапазоні роботи пристрою. Ця інформація надходить в блок 1 синхронізації і управління, де визначають частоту, на якій спектральна густина (рівень) завад має найменше значення. Далі за сигналом з блоку 1 синхронізації і управління перемикач 3 прийом-передача підключає приймально-передавальну антену 4 до акустичного передавача 2 на час випромінювання зондувального сигналу, а після цього до приймача 5 для прийому розсіяних сигналів. Після цього за сигналом з блоку 1 акустичний передавач 2 виробляє потужний імпульс з частотою заповнення рівній частоті найменшої спектральної густини зовнішніх перешкод, що через перемикач 3 прийом-передача надходить в приймально-передавальну антену 4 і випромінюється в простір. Акустичний сигнал, розсіяний на неоднорідностях атмосфери, надходить на приймально-передавальну антену 4 і через перемикач 3 прийом-передача надходить в приймач вузьосмужний 5, де він оброблюється і підсилюється. В блоку 6 виміру параметрів сигналу виконують вимірювання інформативних параметрів корисного сигналу (наприклад, амплітуди, доплеровської частоти) і у блоці 7 обчислення параметрів атмосфери за зміряними значеннями параметрів сигналу визначають параметри атмосфери (наприклад, швидкість і напрямок вітру). Далі приймально-передавальна антенна знов підключається до широкосмугового приймача для аналізу зовнішніх акустичних перешкод і весь цикл зондування повторюється. Для здійснення даного способу до відомої схеми пристрою необхідно додати два нових блоки приймач широкосмуговий 8 і спектроанализатор 9. Як бачимо, у відзнаку від прототипу, де випромінювання і прийом коливань здійснюють на довільній робочої частоті, в запропонованому винаході в якості робочої частоти вибирають таку робочу частоту, на якій рівень перешкод має найменше значення.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of acoustic air sounding
Автори англійськоюKartashov Volodymyr Mykhailovych
Назва патенту російськоюСпособ акустического зондирования атмосферы
Автори російськоюКарташов Владимир Михайлович
МПК / Мітки
МПК: G01W 1/00
Мітки: акустичного, зондування, атмосфери, спосіб
Код посилання
<a href="https://ua.patents.su/3-52715-sposib-akustichnogo-zonduvannya-atmosferi.html" target="_blank" rel="follow" title="База патентів України">Спосіб акустичного зондування атмосфери</a>
Спосіб акустичного зондування атмосфери
Номер патенту: 46160
Опубліковано: 15.05.2002
Автори: Васильченко Андрій Олександрович, Карташов Володимир Михайлович
Мітки: атмосфери, спосіб, зондування, акустичного
Формула / Реферат:
Спосіб акустичного зондування атмосфери, який полягає у випромінюванні в атмосферу в довільно вибраному напрямку акустичних синусоїдальних коливань, прийомі акустичних коливань, розсіяних на природних неоднорідностях атмосфери, вимірі параметрів розсіяного сигналу, обчисленні параметрів атмосфери по виміряних значеннях параметрів розсіяного сигналу, який відрізняється тим, що попередньо виконують аналіз розподілу за напрямками зовнішніх...
Спосіб акустичного зондування атмосфери
Номер патенту: 50860
Опубліковано: 15.11.2002
Автори: Нагібін Ігор Борисович, Васильченко Андрій Олександрович, Риженко Олексій Іванович, Карташов Володимир Михайлович
МПК: G01W 1/00
Мітки: атмосфери, зондування, акустичного, спосіб
Формула / Реферат:
Спосіб акустичного зондування атмосфери, який полягає в випромінюванні в атмосферу акустичних коливань, прийманні акустичних коливань, розсіяних природними неоднорідностями атмосфери, у рознесених точках простору, вимірюванні доплерівських зсувів частоти розсіяних сигналів і визначенні повного вектора швидкості вітру за виміряними значеннями параметрів розсіяних сигналів, який відрізняється тим, що акустичні коливання випромінюють імпульсами...
Спосіб дистанційного вимірювання відносних змін температури повітря за допомогою акустичного зондування атмосфери
Номер патенту: 46524
Опубліковано: 15.05.2002
Автори: Сліпченко Микола Іванович, Дєлов Іван Акіндінович
МПК: G01S 13/00, G01S 13/95
Мітки: температури, вимірювання, атмосфери, зондування, відносних, акустичного, допомогою, повітря, спосіб, дистанційного, змін
Формула / Реферат:
Спосіб дистанційного вимірювання відносних змін температури повітря за допомогою акустичного зондування атмосфери, що включає випромінювання в атмосферу пакета гармонійних коливань повітря, його прийом, перетворення прийнятих звукових коливань в електричні, визначення швидкості звуку, визначення температури, який відрізняється тим, що здійснюють моностатичне зондування атмосфери вертикально чи під кутом до обрію, причому прийом розсіяних...
Спосіб дистанційного визначення типу температурної стратифікації атмосфери за допомогою акустичного зондування атмосфери
Номер патенту: 46522
Опубліковано: 15.05.2002
Автори: Дєлов Іван Акіндінович, Сліпченко Микола Іванович
МПК: G01S 13/95, G01S 13/00
Мітки: акустичного, спосіб, стратифікації, визначення, типу, зондування, допомогою, температурної, атмосфери, дистанційного
Формула / Реферат:
Спосіб дистанційного визначення типу температурної стратифікації атмосфери за допомогою акустичного зондування атмосфери, який включає випромінювання в атмосферу пакета гармонічних коливань звуку, його прийом, перетворення прийнятих звукових коливань в електричні, який відрізняється тим, що випромінювання пакета акустичних хвиль ведуть з однієї точки на місцевості в моностатичному режимі у вертикальному напрямку і під деяким кутом місця в...
Спосіб дистанційного виміру анізотропії інтенсивності температурних пульсацій атмосфери за допомогою акустичного зондування
Номер патенту: 46519
Опубліковано: 15.05.2002
Автори: Сліпченко Микола Іванович, Дєлов Іван Акіндінович
МПК: G01S 13/95
Мітки: допомогою, дистанційного, інтенсивності, спосіб, акустичного, атмосфери, анізотропії, зондування, пульсацій, температурних, виміру
Формула / Реферат:
Спосіб дистанційного виміру анізотропії інтенсивності температурних пульсацій атмосфери за допомогою акустичного зондування, що включає випромінювання в атмосферу пакета гармонічних коливань звуку у вертикальному напрямку і під кутом до вертикалі одночасно чи по черзі з однієї точки на місцевості, прийом розсіяних температурними неоднорідностями акустичних хвиль, перетворення прийнятих звукових коливань в електричні, вимір амплітуди...
Попередній патент: Машина для скочування шлаку з поверхні дзеркала металу в ковші
Наступний патент: Схема для генерування негативних напруг і генератор накачування зарядів для генерування негативних напруг
Випадковий патент: Паралельний суматор