Спосіб ідентифікації об’єктів на конвеєрі
Номер патенту: 56781
Опубліковано: 25.01.2011
Автори: Лехціер Олег Леонідович, Шариф Абубакар, Калу Чидинма.Прешез, Лехціер Леонід Романович

Формула / Реферат
Спосіб ідентифікації об'єктів на конвеєрі, у якому по матриці зображення об'єкта визначають площу об'єкта як суму усіх значимих елементів матриці, після чого порівнюють цю площу з площею зображення еталонного об'єкта і ідентифікують розпізнаваний геометричний об'єкт за критерієм близькості, який відрізняється тим, що результуюче значення площі зображення об'єкта визначають як середнє значення ряду вимірювань площ, які здійснюють у процесі переміщення зображення об'єкта у поле растрової матриці, причому кількість вимірюваних площ зображення об'єкта у полі растрової матриці визначають за ознакою наявності значущих елементів у середині матриці й відсутності таких у її граничних елементах.
Текст
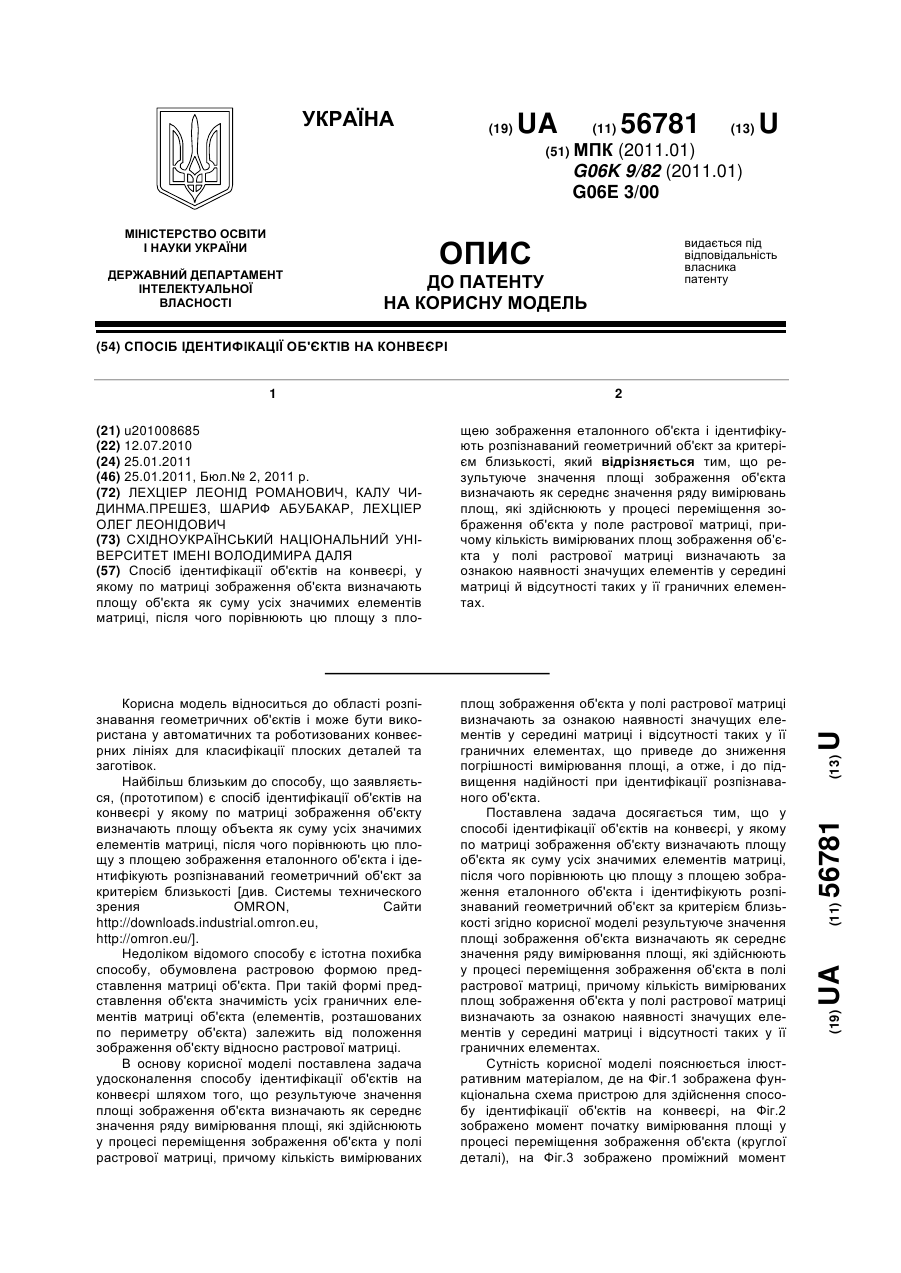
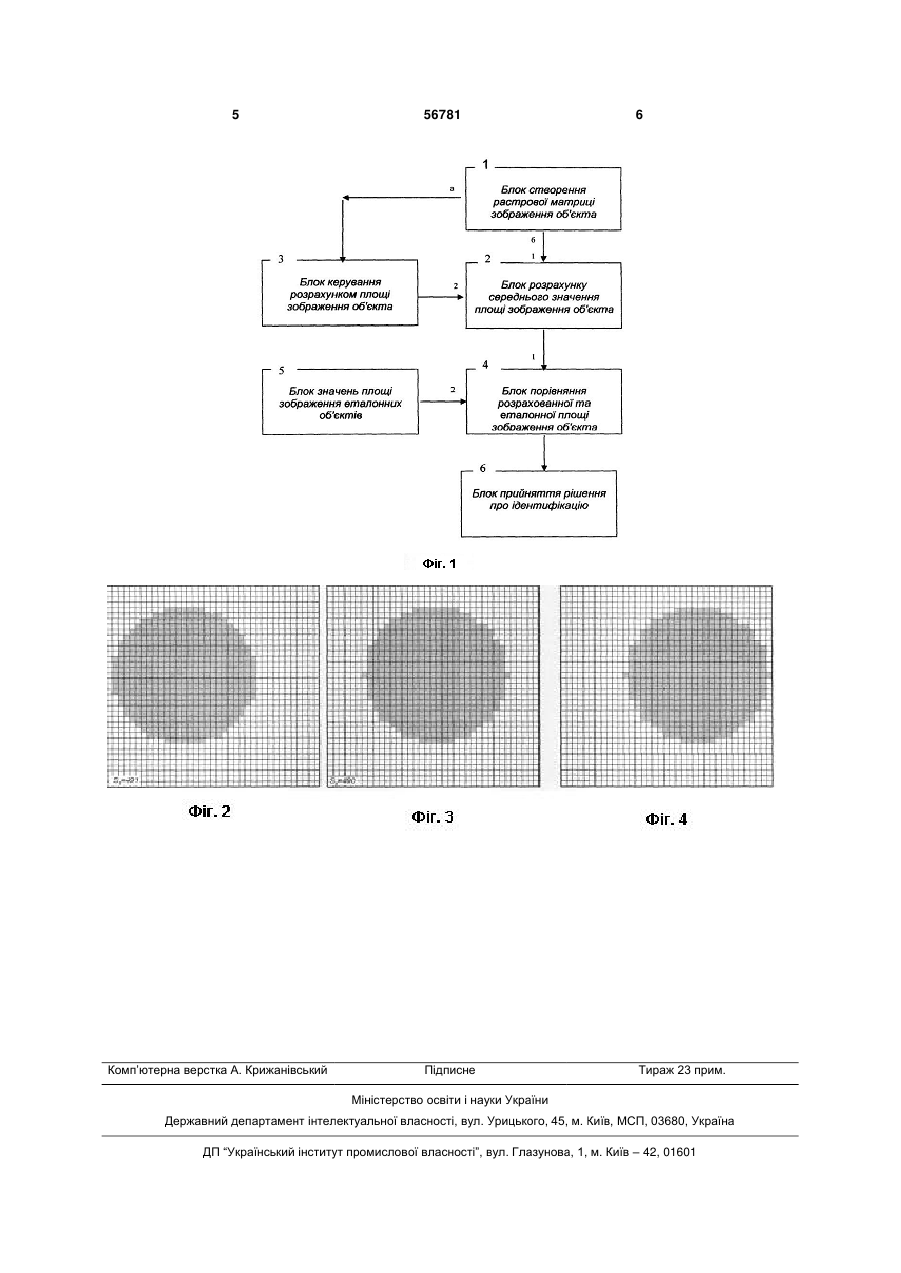
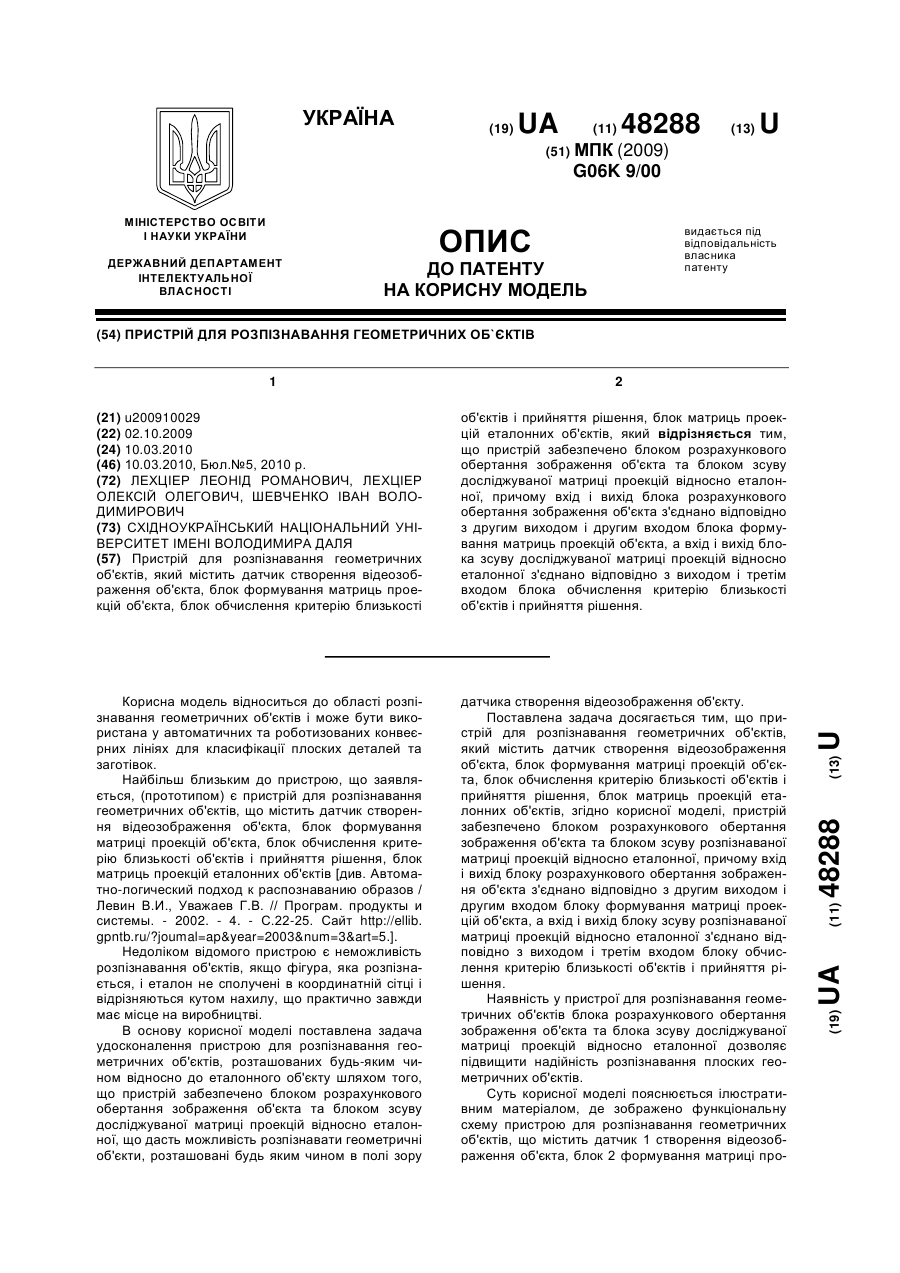
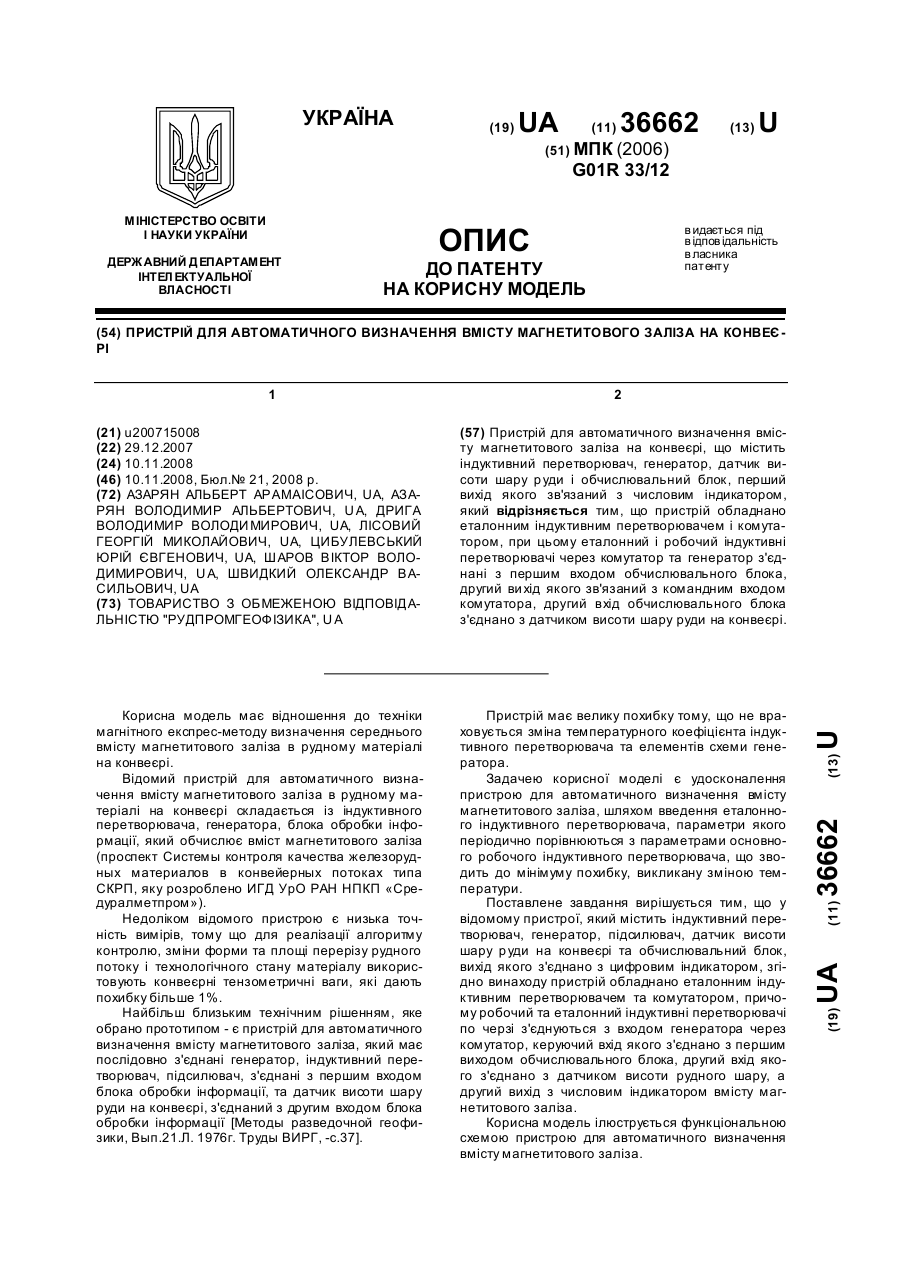
Спосіб ідентифікації об'єктів на конвеєрі, у якому по матриці зображення об'єкта визначають площу об'єкта як суму усіх значимих елементів матриці, після чого порівнюють цю площу з пло 3 вимірювання площі у процесі переміщення зображення об'єкта і на Фіг.4 - зображено момент у якому вимірювання площі зображення об'єкта вже закінчено, оскільки серед граничних елементів растрової матриці з'явився один значущий елемент. Пристрій для здійснення способу ідентифікації об'єктів на конвеєрі містить блок 1 створення растрової матриці зображення об'єкта, блок 2 розрахунку середнього значення площі зображення об'єкта, блок 3 керування розрахунком площі зображення об'єкта, блок 4 порівняння розрахованої та еталонної площ зображення об'єкта, блок 5 значень площ еталонних об'єктів та блок 6 прийняття рішення про ідентифікацію. Виходи "а" і "б" блоку 1 створення растрової матриці відеозображення об'єкта з'єднано відповідно з входами блока 2 розрахунку середнього значення площі зображення об'єкта і блока 3 керування розрахунком площі зображення об'єкта, а виходи блока 2 розрахунку середнього значення площі зображення об'єкта і блока 5 значень площі зображення еталонних об'єктів з'єднано відповідно з 1 та 2 входами блока 4 порівняння розрахованої та еталонної площ зображення об'єкта (Фіг.1). Спосіб розпізнавання геометричних об'єктів здійснюється наступним чином. З виходу "а" і "б" блоку 1 створення растрової матриці зображення об'єкта інформація про частину стрічки конвеєра, яка знаходиться у полі зору відеокамери, надсилають на входи блоків 2 і 3. В блоці 3 керування розрахунком площі зображення об'єкта цю інформацію аналізують. Якщо наявність значущих елементів у середині матриці і відсутність таких у її граничних елементах має місто, то з виходу блока 3 на вхід "2" блока 2 надсилають сигнал, який активізує початок підрахунку площі зображення об'єкту, що відображається у матриці, інформація про яку надсилають з блоку 1 до блоку 2 на перший вхід. Підрахунок миттєвих значень площі зображення об'єкта та її середнього значення здійснюють до моменту, доки не з'явиться значущий елемент (чи елементи) на границі матриці. В цьому разі з виходу блоку 3 на другий вхід блоку 2 надсилають сигнал на завершення розрахунку середнього значення площі зображення об'єкта. В той же момент сигнал, пропорційний середньому значенню площі зображення об'єкта надсилають на перший вхід 4 блоку порівняння розрахованої та еталонної площі зображення об'єкта. Інформацію 56781 4 про еталонну площу зображення об'єкта надсилають на другий вхід блоку 4 з виходу блоку 5 значень площі зображень еталонних об'єктів. Різницю між цими значеннями надсилають з виходу блоку 4 на вхід блоку 6, де і приймають рішення про ідентичність об'єкта еталонному зразку. Процес ідентифікації геометричних об’єктів пояснюється на прикладі ідентифікації плоскої фігури, яка має форму окружності. З виходу датчика 1 інформацію у виді растрової матриці зображення частини стрічки конвеєра з об'єктом, яка показана на Фіг.2а, надсилають на перший вхід блоку 2 та на вхід блоку 3. В блоці 3 керування розрахунком площі зображення об'єкта перевіряють наявність значущих елементів у середині матриці і відсутність значущої інформації у граничних елементах матриці. Після цього з виходу блоку 3 на другий вхід блоку 2 надсилають сигнал на початок розрахунку середнього значення площі зображення об'єкта. Проміжний момент визначення середнього значення площі зображення об'єкта, який розпізнається, приведено на Фіг.3. Розрахунок середнього значення площі зображення об'єкта в блоці 2 проводять до того моменту, коли у граничних елементах матриці не з'явиться значуща інформація, що показано на Фіг.4. В цей момент з виходу блоку 3 на другий вхід блоку 2 надсилають сигнал на припинення розрахунку середньої площі ідентифікованого об'єкта. Сигнал, пропорційний розрахованій середній площі зображення ідентифікованого об'єкта надсилають на перший вхід блоку 4, в якому розраховану площу порівнюють з площею зображення еталонного об'єкта, інформацію про яку надсилають з виходу блока 5 значень площі зображення еталонних об'єктів. Результат порівняння оцінюють в блоці 6, де й приймають рішення про ідентичність або не ідентичність ідентифікованого об'єкта еталонному. На відміну від відомого способу, площу зображення ідентифікованого об'єкта обчислюють як середнє значення ряду вимірювання площі, яку здійснюють у процесі переміщення зображення об'єкта у полі растрової матриці, що підвищить надійність ідентифікації об’єктів на конвеєрі. Таким чином, запропонований спосіб, на відміну від відомого, може бути використаний для надійного розпізнавання геометричних об'єктів у автоматичних та роботизованих конвеєрних лініях для класифікації деталей та заготівок. 5 Комп’ютерна верстка А. Крижанівський 56781 6 Підписне Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюIdentification method of objects on conveyor
Автори англійськоюLekhtsier Leonid Romanovych, Kalu Chydynma.Preshez, Sharif Abubakar, Lekhtsier Oleh Leonidovych
Назва патенту російськоюСпособ идентификации оьъектов ha конвейере
Автори російськоюЛехциер Леонид Романович, Калу Чидинма.Прешез, Шариф Абубакар, Лехциер Олег Леонидович
МПК / Мітки
МПК: G06K 9/00
Мітки: об'єктів, конвеєрі, спосіб, ідентифікації
Код посилання
<a href="https://ua.patents.su/3-56781-sposib-identifikaci-obehktiv-na-konveehri.html" target="_blank" rel="follow" title="База патентів України">Спосіб ідентифікації об’єктів на конвеєрі</a>
Пристрій для розпізнавання геометричних об`єктів
Номер патенту: 48288
Опубліковано: 10.03.2010
Автори: Лехціер Леонід Романович, Шевченко Іван Володимирович, Лехціер Олексій Олегович
МПК: G06K 9/00
Мітки: пристрій, геометричних, розпізнавання, об'єктів
Формула / Реферат:
Пристрій для розпізнавання геометричних об'єктів, який містить датчик створення відеозображення об'єкта, блок формування матриць проекцій об'єкта, блок обчислення критерію близькості об'єктів і прийняття рішення, блок матриць проекцій еталонних об'єктів, який відрізняється тим, що пристрій забезпечено блоком розрахункового обертання зображення об'єкта та блоком зсуву досліджуваної матриці проекцій відносно еталонної, причому вхід і вихід...
Пристрій для автоматичного визначення вмісту магнетитового заліза на конвеєрі
Номер патенту: 36662
Опубліковано: 10.11.2008
Автори: Лісовий Георгій Миколайович, Дрига Володимир Володимирович, Азарян Володимир Альбертович, Шаров Віктор Володимирович, Швидкий Олександр Васильович, Цибулевський Юрій Євгенович, Азарян Альберт Арамаісович
МПК: G01R 33/12
Мітки: пристрій, визначення, заліза, автоматичного, вмісту, конвеєрі, магнетитового
Формула / Реферат:
Пристрій для автоматичного визначення вмісту магнетитового заліза на конвеєрі, що містить індуктивний перетворювач, генератор, датчик висоти шару руди і обчислювальний блок, перший вихід якого зв'язаний з числовим індикатором, який відрізняється тим, що пристрій обладнано еталонним індуктивним перетворювачем і комутатором, при цьому еталонний і робочий індуктивні перетворювачі через комутатор та генератор з'єднані з першим входом...
Спосіб кепстральної ідентифікації сигналів
Номер патенту: 88208
Опубліковано: 25.09.2009
Автори: Селетков Віктор Леонідович, Кузнецов Максим Володимирович
МПК: G01H 11/00, G01V 1/00, G10L 11/00
Мітки: кепстральної, ідентифікації, спосіб, сигналів
Формула / Реферат:
Спосіб кепстральної ідентифікації сигналів, за яким проводять низькочастотну фільтрацію сигналу в смузі частот аналізу, розділяють сигнал на сегменти аналізу однакової тривалості, узгодженої з інтервалом кореляції сигналу, формують на кожному сегменті аналізу значення дискретних часових відліків сигналу шляхом застосування стандартного аналого-цифрового перетворення з частотою дискретизації за часом, узгодженою зі смугою частот аналізу...
Спосіб спектральної ідентифікації мовного сигналу
Номер патенту: 80587
Опубліковано: 10.10.2007
Автори: Селетков Віктор Леонідович, Кузнецов Максим Володимирович
МПК: G10L 17/00, G10L 15/00
Мітки: сигналу, ідентифікації, мовного, спектральної, спосіб
Формула / Реферат:
Спосіб спектральної ідентифікації мовного сигналу в заданій послідовності взаємозв'язаних операцій перетворення мовного сигналу, за яким проводять низькочастотну фільтрацію мовного сигналу в смузі частот 3...10 кГц; розділяють мовний сигнал на сегменти аналізу однакової тривалості 10...30 мс; проводять стандартне 9...12-бітове аналого-цифрове перетворення сигналу з частотою дискретизації 6...20 кГц на кожному сегменті аналізу, який...
Спосіб ідентифікації користувача (варіанти), електронна ідентифікаційна система і пристрій для біометричної ідентифікації особи за характерними параметрами п’ясті руки користувача (варіанти)
Номер патенту: 84568
Опубліковано: 10.11.2008
Автори: Зенов'єв Віктор Валентіновіч, Тахірі Азар Мамед Огли
Мітки: руки, варіанти, ідентифікаційна, ідентифікації, особи, користувача, параметрами, біометричної, пристрій, система, спосіб, п'ясті, електронна, характерними
Формула / Реферат:
1. Спосіб ідентифікації користувача, який використовує електронну систему ідентифікації, що містить принаймні перший і другий електронні засоби ідентифікації, які зв'язані принаймні одною телекомунікаційною лінією, при цьому спосіб включає такі операції: формування бази даних користувача в кожному електронному засобі ідентифікації й ідентифікація користувача, в якому: операція формування бази даних користувача включає такі етапи:а)...
Попередній патент: Спосіб одержання виливків з регульованим співвідношенням структурних складових
Наступний патент: Зубчаста передача
Випадковий патент: Автономний кондиціонер