Автоматизований пристрій для моделювання ефектів невагомості та хвороби руху у лабораторних тварин
Номер патенту: 56972
Опубліковано: 10.02.2011
Автори: Глєбов Олексій Михайлович, Івасенко Анжеліка Володимирівна, Тананакіна Тетяна Павлівна, Модна Юлія Миколаївна, Якобсон Олена Олександрівна, Болгов Дмитро Михайлович
Формула / Реферат
1. Автоматизований пристрій для моделювання ефектів невагомості та хвороби руху у лабораторних тварин, що складається з горизонтальної металевої основи прямокутної форми (7) з нерухомо розташованими двома вертикальними стійками (1), через які зверху проходить горизонтальна металева рухома вісь (2) з можливістю обертання, що зв'язана за допомогою кривошипно-шатунного механізму (9) з електроприводом, підвісної металевої платформи прямокутної форми (5), блока керування (8), який відрізняється тим, що пристрій виконаний з можливістю роботи під автоматизованим комп'ютерним контролем і адаптований для лабораторних тварин.
2. Пристрій за п. 1, який відрізняється тим, що кріплення підвісної металевої платформи (5) до металевої осі приладу (2) відбувається за допомогою знімних металевих гачків-підвісів (4), які з однієї сторони загнуті для зачеплення за горизонтальну рухому вісь (2), а з іншого мають різьбу для зміни кута нахилу підвісної платформи (5).
Текст
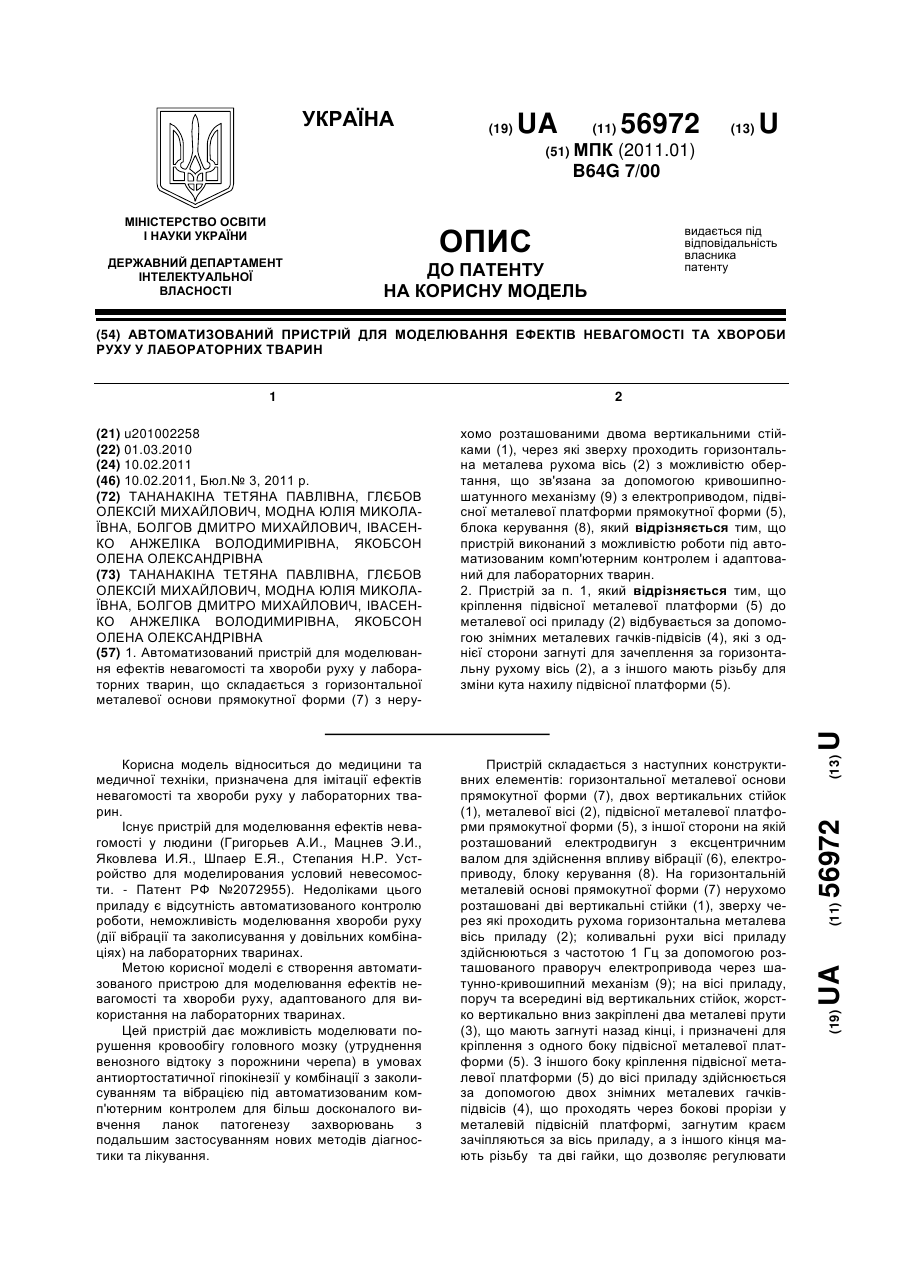
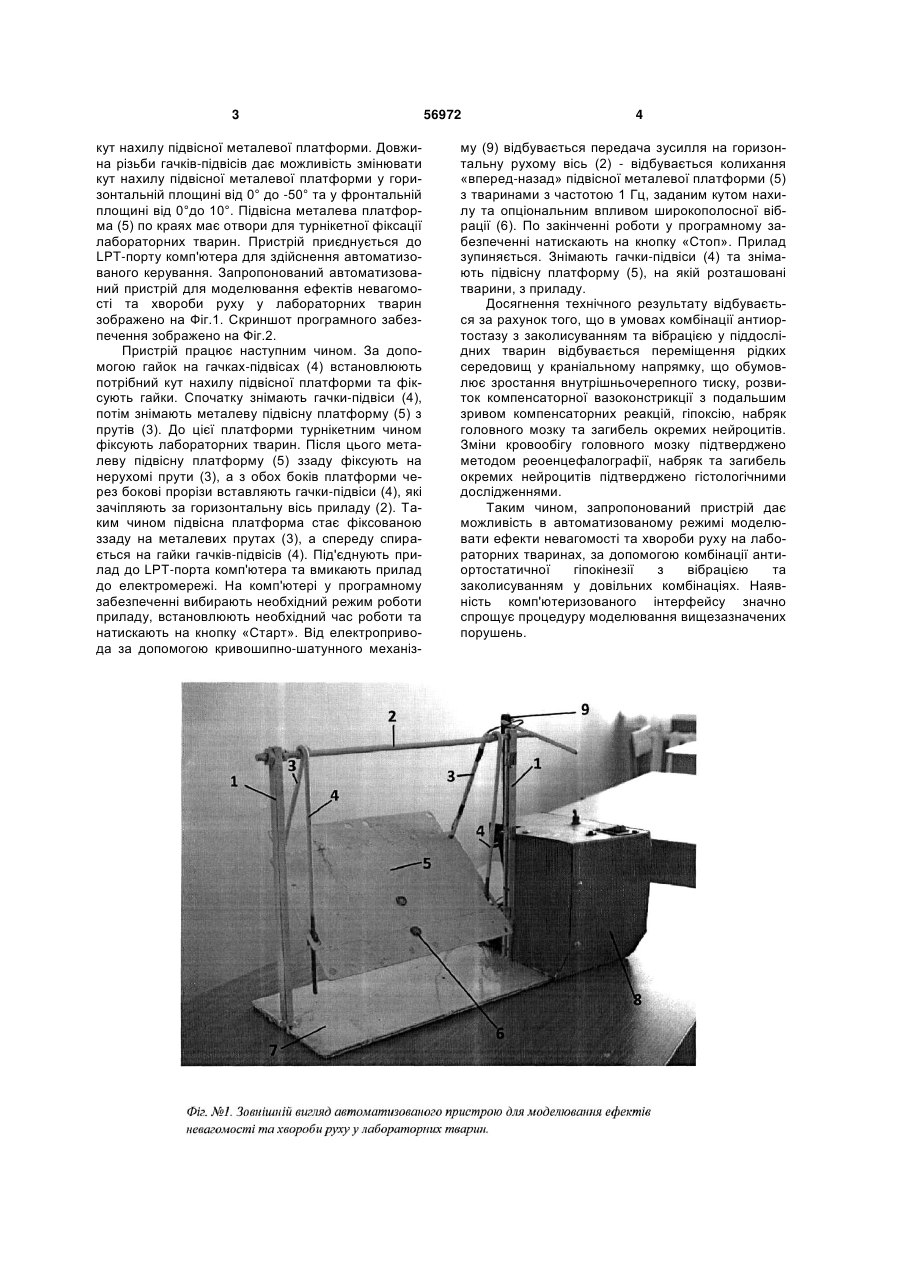
1. Автоматизований пристрій для моделювання ефектів невагомості та хвороби руху у лабораторних тварин, що складається з горизонтальної металевої основи прямокутної форми (7) з неру 3 кут нахилу підвісної металевої платформи. Довжина різьби гачків-підвісів дає можливість змінювати кут нахилу підвісної металевої платформи у горизонтальній площині від 0° до -50° та у фронтальній площині від 0°до 10°. Підвісна металева платформа (5) по краях має отвори для турнікетної фіксації лабораторних тварин. Пристрій приєднується до LPT-порту комп'ютера для здійснення автоматизованого керування. Запропонований автоматизований пристрій для моделювання ефектів невагомості та хвороби руху у лабораторних тварин зображено на Фіг.1. Скриншот програмного забезпечення зображено на Фіг.2. Пристрій працює наступним чином. За допомогою гайок на гачках-підвісах (4) встановлюють потрібний кут нахилу підвісної платформи та фіксують гайки. Спочатку знімають гачки-підвіси (4), потім знімають металеву підвісну платформу (5) з прутів (3). До цієї платформи турнікетним чином фіксують лабораторних тварин. Після цього металеву підвісну платформу (5) ззаду фіксують на нерухомі прути (3), а з обох боків платформи через бокові прорізи вставляють гачки-підвіси (4), які зачіпляють за горизонтальну вісь приладу (2). Таким чином підвісна платформа стає фіксованою ззаду на металевих прутах (3), а спереду спирається на гайки гачків-підвісів (4). Під'єднують прилад до LPT-порта комп'ютера та вмикають прилад до електромережі. На комп'ютері у програмному забезпеченні вибирають необхідний режим роботи приладу, встановлюють необхідний час роботи та натискають на кнопку «Старт». Від електропривода за допомогою кривошипно-шатунного механіз 56972 4 му (9) відбувається передача зусилля на горизонтальну рухому вісь (2) - відбувається колихання «вперед-назад» підвісної металевої платформи (5) з тваринами з частотою 1 Гц, заданим кутом нахилу та опціональним впливом широкополосної вібрації (6). По закінченні роботи у програмному забезпеченні натискають на кнопку «Стоп». Прилад зупиняється. Знімають гачки-підвіси (4) та знімають підвісну платформу (5), на якій розташовані тварини, з приладу. Досягнення технічного результату відбувається за рахунок того, що в умовах комбінації антиортостазу з заколисуванням та вібрацією у піддослідних тварин відбувається переміщення рідких середовищ у краніальному напрямку, що обумовлює зростання внутрішньочерепного тиску, розвиток компенсаторної вазоконстрикції з подальшим зривом компенсаторних реакцій, гіпоксію, набряк головного мозку та загибель окремих нейроцитів. Зміни кровообігу головного мозку підтверджено методом реоенцефалографії, набряк та загибель окремих нейроцитів підтверджено гістологічними дослідженнями. Таким чином, запропонований пристрій дає можливість в автоматизованому режимі моделювати ефекти невагомості та хвороби руху на лабораторних тваринах, за допомогою комбінації антиортостатичної гіпокінезії з вібрацією та заколисуванням у довільних комбінаціях. Наявність комп'ютеризованого інтерфейсу значно спрощує процедуру моделювання вищезазначених порушень. 5 Комп’ютерна верстка Л.Литвиненко 56972 6 Підписне Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюAutomated device for simulating effects of weightlessness and motion diseases in laboratory animals
Автори англійськоюTananakina Tetiana Pavlivna, Hlebov Oleksii Mykhailovych, Modna Yulia Mykolaivna, Bolhov Dmytro Mykhailovych, Ivasenko Anzhelika Volodymyrivna, Yakobson Olena Oleksandrivna
Назва патенту російськоюАвтоматизированное устройство для моделирования эффектов невесомости и болезни движения у лабораторных животных
Автори російськоюТананакина Татьяна Павловна, Глебов Алексей Михайлович, Модна Юлия Николаевна, Болгов Дмитрий Михайлович, Ивасенко Анжелика Владимировна, Якобсон Елена Александровна
МПК / Мітки
МПК: B64G 7/00
Мітки: тварин, руху, пристрій, ефектів, автоматизований, хвороби, моделювання, невагомості, лабораторних
Код посилання
<a href="https://ua.patents.su/3-56972-avtomatizovanijj-pristrijj-dlya-modelyuvannya-efektiv-nevagomosti-ta-khvorobi-rukhu-u-laboratornikh-tvarin.html" target="_blank" rel="follow" title="База патентів України">Автоматизований пристрій для моделювання ефектів невагомості та хвороби руху у лабораторних тварин</a>
Пристрій для фіксації лабораторних тварин

Номер патенту: 317
Опубліковано: 30.04.1999
Автори: Звягінцева Тетяна Володимирівна, Пилипенко Микола Іванович
Мітки: лабораторних, пристрій, тварин, фіксації
Формула / Реферат:
Пристрій для фіксації лабораторних тварин, який включає закріплені на підставці пенали з отворами у стінках, який відрізняється тим, що пенали розташовані радіально з однаковими відстанями між їхніми поздовжніми осями.
Спосіб моделювання експериментальної травми шлунка у дрібних лабораторних тварин
Номер патенту: 10579
Опубліковано: 15.11.2005
Автори: Магаляс Віктор Миколайович, Бойко Валерій Володимирович, Польовий Віктор Павлович
МПК: G09B 23/28
Мітки: тварин, шлунка, дрібних, травми, спосіб, лабораторних, моделювання, експериментальної
Формула / Реферат:
Спосіб моделювання травми шлунка у дрібних лабораторних тварин, що включає введення тварин в наркоз і лапаротомію, який відрізняється тим, що на дрібних лабораторних тваринах (білих щурах) виконують експериментальну травму шлунка за допомогою хірургічного пінцета, робочі кінці якого заводять на краї фундального відділу шлунка на 2 мм і стискують до повного змикання браншів.
Спосіб моделювання експериментальної травми печінки у дрібних лабораторних тварин
Номер патенту: 11120
Опубліковано: 15.12.2005
Автори: Пішак Василь Павлович, Магаляс Віктор Миколайович, Бойко Валерій Володимирович, Польовий Віктор Павлович
МПК: G09B 23/28
Мітки: експериментальної, лабораторних, моделювання, печінки, тварин, травми, спосіб, дрібних
Формула / Реферат:
Спосіб моделювання стандартизованої травми печінки у дрібних лабораторних тварин, при якому у білих щурів стандартизоване поранення печінки виконується за допомогою хірургічного пінцета, робочі кінці якого тричі (на відстані 1,5 мм) заводяться на краї нижньої частки печінки на 2 мм і стискуються до повного змикання браншів.
Спосіб моделювання експериментальної травми селезінки у дрібних лабораторних тварин
Номер патенту: 11136
Опубліковано: 15.12.2005
Автори: Пішак Василь Павлович, Магаляс Віктор Миколайович, Бойко Валерій Володимирович, Польовий Віктор Павлович
МПК: G09B 23/28
Мітки: травми, дрібних, моделювання, експериментальної, селезінки, спосіб, лабораторних, тварин
Формула / Реферат:
Спосіб моделювання стандартизованої травми селезінки у дрібних лабораторних тварин, при якому у білих щурів стандартизоване поранення виконується за допомогою хірургічного пінцета, робочі кінці якого заводяться на краї селезінки (на межі між верхніми 2/3 та нижньою 1/3 її частинами) на 2 мм і стискуються до повного змикання браншів.
Спосіб моделювання експериментальної травми товстої кишки у дрібних лабораторних тварин
Номер патенту: 11137
Опубліковано: 15.12.2005
Автори: Магаляс Віктор Миколайович, Польовий Віктор Павлович, Бойко Валерій Володимирович, Пішак Василь Павлович
МПК: G09B 23/28
Мітки: травми, моделювання, лабораторних, кишки, експериментальної, товстої, спосіб, тварин, дрібних
Формула / Реферат:
Спосіб моделювання стандартизованого поранення товстої кишки у дрібних лабораторних тварин, при якому у білих щурів стандартизоване поранення товстої кишки виконується очними ножицями шляхом розсічення поперек кишкової стінки при довжині розрізу 2 мм.
Попередній патент: Спосіб моніторингу, діагностування, керування, забезпечення безпеки локального об’єкта
Наступний патент: Ультрафіолетова лампа бар’єрного розряду
Випадковий патент: Комплектний розподільний пристрій типу км-1ф (м/в)