Система електромагнітного зондування земної кори
Номер патенту: 57665
Опубліковано: 10.03.2011
Автори: Баженов Віктор Григорович, Худецький Михайло Васильович, Якимчук Микола Андрійович
Формула / Реферат
Система електромагнітного зондування земної кори, яка містить два модулі - передавальний та приймальний, причому передавальний - містить випромінюючу антену, з'єднану через підсилювач потужності з виходом першого синтезатора частоти, управляючі входи якого з'єднані з виходами першого мікроконтролера, на вхід якого підключений перший модуль GPS, a приймальний модуль містить вимірювальну антену, з'єднану з першим входом перетворювача, другий вхід якого з'єднаний з виходом другого синтезатора частоти, а вихід перетворювача підключений до першого входу синхронного амплітудного детектора, до другого входу якого підключений вихід формувача-дільника частоти, а вихід синхронного амплітудного детектора через фільтр нижніх частот підключений до входу аналого-цифрового перетворювача, цифрові виходи якого підключені до входів другого мікроконтролера, причому виходи другого мікроконтролера підключені до входів керування другого синтезатора частоти, крім того, другий мікроконтролер з'єднаний з персональним комп'ютером, до якого підключений другий модуль GPS, a також з'єднаний із входом синхронізації аналого-цифрового перетворювача, яка відрізняється тим, що передавальний модуль містить перший помножувач частоти синхроімпульсів, вихід якого підключений до входу опорного сигналу першого синтезатора частоти, а вхід з'єднаний з виходом синхроімпульсів першого модуля GPS, а приймальний модуль містить другий помножувач частоти синхроімпульсів, вихід якого підключений до входу опорного сигналу другого синтезатора частоти, а також до входу формувача-дільника частоти, а вхід з'єднаний з виходом синхроімпульсів другого модуля GPS, причому входи керування першого помножувача частоти підключені до виходів першого мікроконтролера, а входи керування другого помножувача частоти підключені до виходів другого мікроконтролера.
Текст
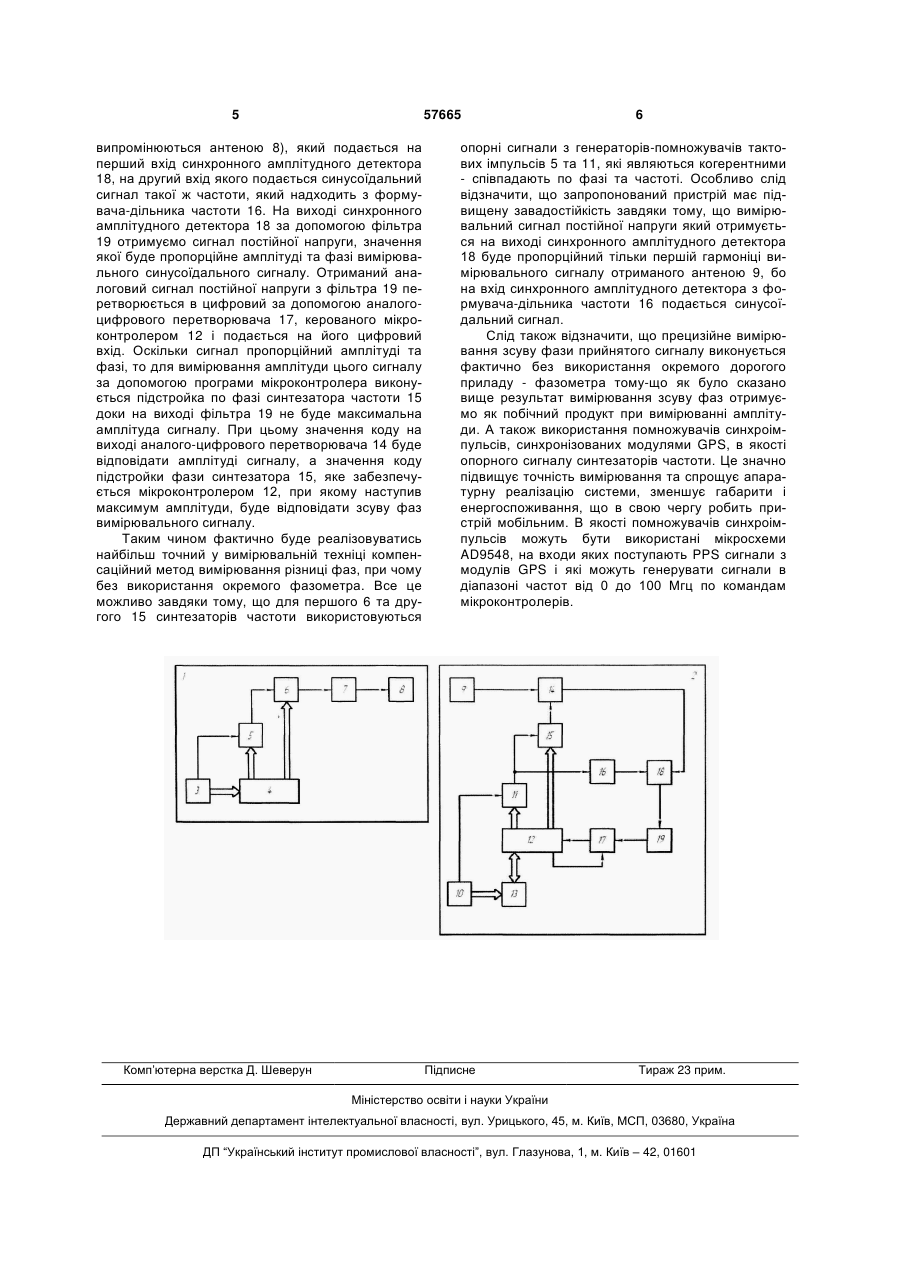
Система електромагнітного зондування земної кори, яка містить два модулі - передавальний та приймальний, причому передавальний - містить випромінюючу антену, з'єднану через підсилювач потужності з виходом першого синтезатора частоти, управляючі входи якого з'єднані з виходами першого мікроконтролера, на вхід якого підключений перший модуль GPS, a приймальний модуль містить вимірювальну антену, з'єднану з першим входом перетворювача, другий вхід якого з'єднаний з виходом другого синтезатора частоти, а вихід перетворювача підключений до першого входу синхронного амплітудного детектора, до другого входу якого підключений вихід формувачадільника частоти, а вихід синхронного амплітудного детектора через фільтр нижніх частот підклю U 2 (19) 1 3 приймальною антеною опорного сигналу через попередній підсилювач, а вихід підключений до другого входу перетворювача, вхід керування підключений до другого мікроконтролера, при цьому другий синтезатор частоти виконаний з можливістю зміни початкової фази вихідного сигналу. Вадами даного обладнання є те, що воно має низьку точність та завадостійкість за рахунок використання в передавальному та приймальному модулях окремих блоків для формування опорного сигналу, таких як генератора опорної частоти, двох додаткових антен, попереднього підсилювача та підсилювача потужності, рівень нестабільності фазочастотних характеристик і шумів яких вносять значний вклад в похибку роботи системи. Крім того, опорний сигнал при випромінюванні між антенами, передається з деякими затримками, які потрібно постійно компенсувати в приймальному модулі. В основу корисної моделі поставлене завдання вдосконалення пристрою для пошуку неоднорідностей в земній корі, в якому, шляхом зміни структурної схеми досягають підвищення точності та завадостійкості вимірювання при спрощенні апаратної частини за рахунок використання новітніх технологій. Поставлене завдання вирішується тим, що система електромагнітного зондування земної кори, яка містить два модулі - передавальний та приймальний, причому передавальний - містить випромінюючу антену, з'єднану через підсилювач потужності з виходом першого синтезатора частоти, управляючі входи якого з'єднані з виходами першого мікроконтролера, к входам якого підключений перший модуль GPS, a прийомний модуль містить вимірювальну антену, з'єднану з першим входом перетворювача, другий вхід якого з'єднаний з виходом другого синтезатора частоти, а вихід перетворювача підключений до першого входу синхронного амплітудного детектора, до другого входу якого підключений вихід формувачадільника частоти, а вихід синхронного амплітудного детектора через фільтр нижніх частот підключений до входу аналого-цифрового перетворювача, цифрові виходи якого підключені до входів другого мікроконтролера, причому виходи другого мікроконтролера підключені до входів керування другого синтезатора частоти, крім того другий мІкроконтролер з'єднаний з персональним комп'ютером, до якого підключений другий модуль GPS, а також з'єднаний із входом синхронізації аналогоцифрового перетворювача, яка відрізняється тим, що передавальний модуль містить перший помножувач частоти синхроімпульсів, вихід якого підключений до входу опорного сигналу першого синтезатора частоти, а вхід з'єднаний з виходом синхроімпульсів першого модуля GPS, а приймальний модуль містить другий помножувач частоти синхроімпульсів, вихід якого підключений до входу опорного сигналу другого синтезатора частоти, а також до входу формувача-дільника частоти, а вхід з'єднаний з виходом синхроімпульсів другого модуля GPS, причому входи керування першого помножувача частоти підключені к другим виходам першого мікроконтролера, а входи керування дру 57665 4 гого помножувача частоти підключені к другим виходам другого мікроконтролера. Сутність корисної моделі пояснюється креслеником, де на фіг. 1 зображена структурна схема системи електромагнітного зондування земної кори. Структурна схема містить передавальний і приймальний модулі 1 і 2, в яких формування двох когерентних синусоїдальних сигналів виконується на базі двох помножувачів синхроімпульсів 5 і 11 (керованих за допомогою мікроконтролерів 4 і 12), входи синхронізації яких підключені до модулів GPS 3 і 10 відповідно. Виходи помножувачів синхроімпульсів з'єднані з входами опорного сигналу синтезаторів частоти 6 і 15 відповідно, входи керування яких підключені до мікроконтролерів 4 та 12. Вихід синтезатора частоти 6 підключений до входу підсилювача потужності 7, до виходу якого підключена випромінювальна антена 8. Вихід синтезатора частоти 15 підключено до другого входу перетворювача частоти 14, перший вхід якого з'єднаний з приймальною антеною 9. Вихід перетворювача 14 підключений до одного із входів синхронного амплітудного детектора 18, другий вхід якого підключений до виходу формувача-дільника частоти синусоїдального сигналу 16, вхід якого з'єднаний з виходом помножувача частоти синхроімпульсів 11. Вихід синхронного амплітудного детектора 18 підключений через фільтр нижніх частот 19 до аналогового входу аналого-цифрового перетворювача 17, цифрові виходи якого підключені до входів мікроконтролера 12, причому вхід керування аналогоцифрового перетворювача 17 також з'єднаний з мікроконтролером 12 . Система працює наступним чином. Модулі GPS 3 і 10 подають синхроімпульси (PPS сигнали (Pulse Per Second)) на синхровходи помножувачів 5 та 11, з виходів яких отримуються фактично два когерентні сигнали. З помножувача синхроімпульсів 5 сигнал поступає на вхід синтезатора частоти 6. З синтезатора частоти 6 сигнал, заданої мікроконтролером 4 частоти, через підсилювач потужності 7 подається на випромінювальну антену 8. Випромінювальний сигнал створює в навколишньому просторі електромагнітне поле. Це поле, проходячи через структуру земної кори, індукує в ній вихрові струми, які, у свою чергу, створюють вторинне електромагнітне поле, амплітуда і фазовий зсув якого залежить як від електричних властивостей землі, так і від наявних у ній неоднорідностей. Вторинне електромагнітне поле приймається вимірювальною антеною 9, сигнал з якої поступає на перетворювач частоти 14. На другий вхід цього ж перетворювача 14 поступає сигнал з синтезатора частоти 15, заданої мікроконтролером 12,( при чому різниця між значеннями частот з синтезаторів 15 і 6 завжди фіксована). На вхід синтезатора частоти 15 подається сигнал з помножувача синхроімпульсів 11. Момент зміни частот синтезаторів 6 та 15 визначається мікроконтролерами 4 і 12 відповідно, завдяки модулям GPS 3 та 10. Перетворювач 14 виділяє сигнал проміжної частоти (частота якого залишається постійною у всьому діапазоні зміни сітки частот сигналів, що 5 57665 випромінюються антеною 8), який подається на перший вхід синхронного амплітудного детектора 18, на другий вхід якого подається синусоїдальний сигнал такої ж частоти, який надходить з формувача-дільника частоти 16. На виході синхронного амплітудного детектора 18 за допомогою фільтра 19 отримуємо сигнал постійної напруги, значення якої буде пропорційне амплітуді та фазі вимірювального синусоїдального сигналу. Отриманий аналоговий сигнал постійної напруги з фільтра 19 перетворюється в цифровий за допомогою аналогоцифрового перетворювача 17, керованого мікроконтролером 12 і подається на його цифровий вхід. Оскільки сигнал пропорційний амплітуді та фазі, то для вимірювання амплітуди цього сигналу за допомогою програми мікроконтролера виконується підстройка по фазі синтезатора частоти 15 доки на виході фільтра 19 не буде максимальна амплітуда сигналу. При цьому значення коду на виході аналого-цифрового перетворювача 14 буде відповідати амплітуді сигналу, а значення коду підстройки фази синтезатора 15, яке забезпечується мікроконтролером 12, при якому наступив максимум амплітуди, буде відповідати зсуву фаз вимірювального сигналу. Таким чином фактично буде реалізовуватись найбільш точний у вимірювальній техніці компенсаційний метод вимірювання різниці фаз, при чому без використання окремого фазометра. Все це можливо завдяки тому, що для першого 6 та другого 15 синтезаторів частоти використовуються Комп’ютерна верстка Д. Шеверун 6 опорні сигнали з генераторів-помножувачів тактових імпульсів 5 та 11, які являються когерентними - співпадають по фазі та частоті. Особливо слід відзначити, що запропонований пристрій має підвищену завадостійкість завдяки тому, що вимірювальний сигнал постійної напруги який отримується на виході синхронного амплітудного детектора 18 буде пропорційний тільки першій гармоніці вимірювального сигналу отриманого антеною 9, бо на вхід синхронного амплітудного детектора з формувача-дільника частоти 16 подається синусоїдальний сигнал. Слід також відзначити, що прецизійне вимірювання зсуву фази прийнятого сигналу виконується фактично без використання окремого дорогого приладу - фазометра тому-що як було сказано вище результат вимірювання зсуву фаз отримуємо як побічний продукт при вимірюванні амплітуди. А також використання помножувачів синхроімпульсів, синхронізованих модулями GPS, в якості опорного сигналу синтезаторів частоти. Це значно підвищує точність вимірювання та спрощує апаратурну реалізацію системи, зменшує габарити і енергоспоживання, що в свою чергу робить пристрій мобільним. В якості помножувачів синхроімпульсів можуть бути використані мікросхеми AD9548, на входи яких поступають PPS сигнали з модулів GPS і які можуть генерувати сигнали в діапазоні частот від 0 до 100 Мгц по командам мікроконтролерів. Підписне Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for electromagnetic sounding of the earth crust
Автори англійськоюBazhenov Viktor Hryhorovych, Yakymchuk Mykola Andriiovych, Khudetskyi Mykhailo Vasyliovych
Назва патенту російськоюСистема электромагнитного зондирования земной коры
Автори російськоюБаженов Виктор Григорьевич, Якимчук Николай Андреевич, Худецкий Михаил Васильевич
МПК / Мітки
МПК: G01V 3/10
Мітки: система, корі, земної, зондування, електромагнітного
Код посилання
<a href="https://ua.patents.su/3-57665-sistema-elektromagnitnogo-zonduvannya-zemno-kori.html" target="_blank" rel="follow" title="База патентів України">Система електромагнітного зондування земної кори</a>
Автоматичний вимірювач напруженості електромагнітного поля
Номер патенту: 7135
Опубліковано: 15.06.2005
Автори: Щербина Ольга Алімівна, Ільницький Людвіг Якович
МПК: G01R 29/08
Мітки: напруженості, вимірювач, поля, автоматичний, електромагнітного
Формула / Реферат:
Автоматичний вимірювач напруженості електромагнітного поля, який містить вимірювальну антену, що з'єднана з першим входом комутатора, вихід якого приєднаний до першого входу приймача, другий вхід приймача з'єднаний з виходом гетеродина, вихід гетеродина з'єднаний з входом вимірювача частоти і з другим входом змішувача, до першого входу якого підключений генератор постійної частоти, вихід змішувача підключений до входу атенюатора надвисоких...
Система для пошуку неоднорідностей в земній корі
Номер патенту: 50747
Опубліковано: 25.06.2010
Автори: Димко Ольга Сергіївна, Якимчук Микола Андрійович, Баженов Віктор Григорович
МПК: G01V 3/10
Мітки: неоднорідностей, система, корі, земній, пошуку
Формула / Реферат:
Система для пошуку неоднорідностей в земній корі, яка містить випромінюючу та вимірювальну антени, перетворювач, з'єднаний першим входом з вимірювальною антенною, генератор опорної частоти, блок формування двох сигналів з постійною різницею частот, який відрізняється тим, що система містить передавальний та приймальний модулі, причому частина блока формування двох сигналів з постійною різницею частот знаходиться в передавальному модулі, а...
Система для пошуку неоднорідностей в земній корі
Номер патенту: 93794
Опубліковано: 10.03.2011
Автори: Димко Ольга Сергіївна, Баженов Віктор Григорович, Якимчук Микола Андрійович
МПК: G01V 3/10
Мітки: корі, неоднорідностей, система, пошуку, земній
Формула / Реферат:
Система для пошуку неоднорідностей в Землі, яка містить випромінюючу та вимірювальну антени, перетворювач частоти, з'єднаний першим входом з вимірювальною антеною, генератор опорної частоти, блок формування двох сигналів з постійною різницею частот, яка відрізняється тим що додатково містить передавальний та приймальний модулі, причому перша частина блока формування двох сигналів з постійною різницею частот розміщена в передавальному модулі,...
Адаптивна нелінійна система управління
Номер патенту: 44723
Опубліковано: 12.10.2009
Автори: Шпак Ганна Сергіївна, Дибська Ирина Юріївна, Бандура Іван Миколайович
МПК: G05B 13/00
Мітки: нелінійна, адаптивна, система, управління
Формула / Реферат:
Адаптивна нелінійна система управління, що містить перший помножувач, вихід якого з'єднаний через паралельно включені диференціатор, інтегратор і підсилювач з входами першого суматора, а вихід якого підключений до першого входу другого помножувача, вихідний сигнал з цього помножувача сполучений з першим входом другого суматора, вихід якого з'єднаний через регулятор з входом об'єкта управління, вихід якого підключений до першого входу першого...
Спосіб визначення насувних тектонічних порушень в розрізах свердловин, що буряться в осадовій оболонці земної кори
Номер патенту: 51510
Опубліковано: 15.11.2002
Автори: Орлов Олександр Олександрович, Трубенко Олександр Миколайович, Чорний Михайло Іванович, Омельченко Валерій Григорович
МПК: G01V 3/00
Мітки: оболонці, земної, насувних, визначення, свердловин, тектонічних, осадовій, спосіб, корі, розрізах, порушень, буряться
Формула / Реферат:
Спосіб визначення насувних тектонічних порушень в розрізах свердловин, що буряться в осадовій оболонці земної кори, який включає буріння свердловини і визначення в її розрізах нагромадження одна на одну товщ гірських порід, який відрізняється тим, що для визначення нагромадження гірських порід проводять дослідження щільностіуламків шламу і будують фактичну криву залежності щільності гірських порід шламу від глибини.
Попередній патент: Датчик для ультразвукової діагностики трансмісійним методом акустичних властивостей об’ємних структур і субстратів в передній половині очного яблука
Наступний патент: Спосіб частотної корекції звуковідтворюючих пристроїв
Випадковий патент: Рукавоутворювач