Адаптивна нелінійна система управління
Номер патенту: 44723
Опубліковано: 12.10.2009
Автори: Бандура Іван Миколайович, Дибська Ирина Юріївна, Шпак Ганна Сергіївна
Формула / Реферат
Адаптивна нелінійна система управління, що містить перший помножувач, вихід якого з'єднаний через паралельно включені диференціатор, інтегратор і підсилювач з входами першого суматора, а вихід якого підключений до першого входу другого помножувача, вихідний сигнал з цього помножувача сполучений з першим входом другого суматора, вихід якого з'єднаний через регулятор з входом об'єкта управління, вихід якого підключений до першого входу першого помножувача, до других входів першого і другого помножувачів підключений вхідний сигнал, яка відрізняється тим, що в неї введені спостерігач стану по управлінню і спостерігач стану по виходу, виходи яких через третій суматор з'єднані з першим входом четвертого суматора, другий вхід четвертого суматора і вхід спостерігача стану по виходу підключені до виходу об'єкта управління, вихід четвертого суматора через ітераційний інверсний фільтр з'єднаний з другим входом другого суматора, вихід якого з'єднаний з входом спостерігача стану по управлінню.
Текст
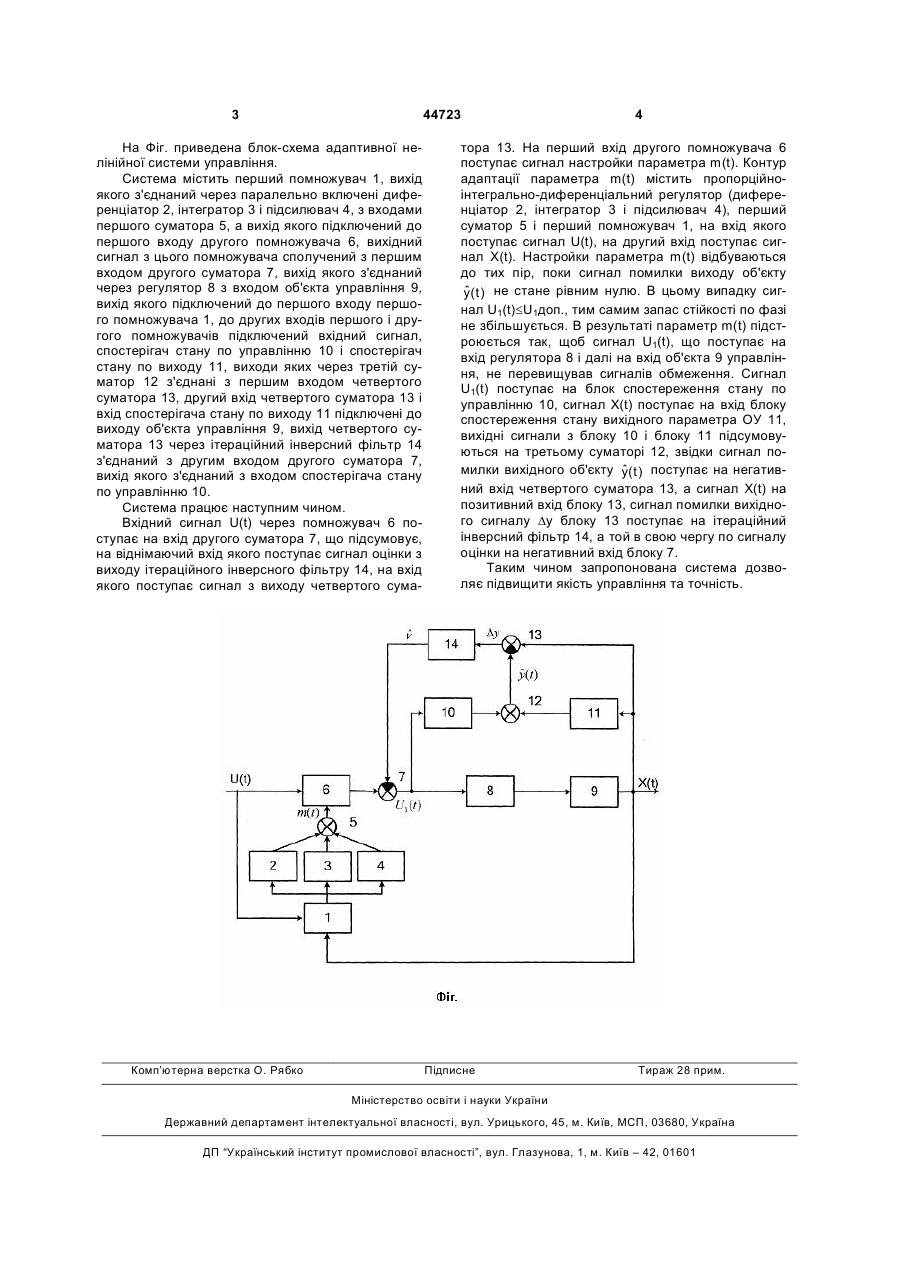
Адаптивна нелінійна система управління, що містить перший помножувач, вихід якого з'єднаний через паралельно включені диференціатор, інтегратор і підсилювач з входами першого суматора, а вихід якого підключений до першого входу другого помножувача, вихідний сигнал з цього помножува 3 44723 На Фіг. приведена блок-схема адаптивної нелінійної системи управління. Система містить перший помножувач 1, вихід якого з'єднаний через паралельно включені диференціатор 2, інтегратор 3 і підсилювач 4, з входами першого суматора 5, а вихід якого підключений до першого входу другого помножувача 6, вихідний сигнал з цього помножувача сполучений з першим входом другого суматора 7, вихід якого з'єднаний через регулятор 8 з входом об'єкта управління 9, вихід якого підключений до першого входу першого помножувача 1, до других входів першого і другого помножувачів підключений вхідний сигнал, спостерігач стану по управлінню 10 і спостерігач стану по виходу 11, виходи яких через третій суматор 12 з'єднані з першим входом четвертого суматора 13, другий вхід четвертого суматора 13 і вхід спостерігача стану по виходу 11 підключені до виходу об'єкта управління 9, вихід четвертого суматора 13 через ітераційний інверсний фільтр 14 з'єднаний з другим входом другого суматора 7, вихід якого з'єднаний з входом спостерігача стану по управлінню 10. Система працює наступним чином. Вхідний сигнал U(t) через помножувач 6 поступає на вхід другого суматора 7, що підсумовує, на віднімаючий вхід якого поступає сигнал оцінки з виходу ітераційного інверсного фільтру 14, на вхід якого поступає сигнал з виходу четвертого сума Комп’ютерна верстка О. Рябко 4 тора 13. На перший вхід другого помножувача 6 поступає сигнал настройки параметра m(t). Контур адаптації параметра m(t) містить пропорційноінтегрально-диференціальний регулятор (диференціатор 2, інтегратор 3 і підсилювач 4), перший суматор 5 і перший помножувач 1, на вхід якого поступає сигнал U(t), на другий вхід поступає сигнал X(t). Настройки параметра m(t) відбуваються до тих пір, поки сигнал помилки виходу об'єкту ˆ y( t ) не стане рівним нулю. В цьому випадку сигнал U1(t)£U1дoп., тим самим запас стійкості по фазі не збільшується. В результаті параметр m(t) підстроюється так, щоб сигнал U1(t), що поступає на вхід регулятора 8 і далі на вхід об'єкта 9 управління, не перевищував сигналів обмеження. Сигнал U1(t) поступає на блок спостереження стану по управлінню 10, сигнал X(t) поступає на вхід блоку спостереження стану вихідного параметра ОУ 11, вихідні сигнали з блоку 10 і блоку 11 підсумовуються на третьому суматорі 12, звідки сигнал помилки вихідного об'єкту y( t ) поступає на негативˆ ний вхід четвертого суматора 13, а сигнал X(t) на позитивний вхід блоку 13, сигнал помилки вихідного сигналу Dу блоку 13 поступає на ітераційний інверсний фільтр 14, а той в свою чергу по сигналу оцінки на негативний вхід блоку 7. Таким чином запропонована система дозволяє підвищити якість управління та точність. Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюAdaptive non-linear control system
Автори англійськоюDybska Iryna Yuriivna, Bandura Ivan Mykolaiovych, Shpak Hanna Serhiivna
Назва патенту російськоюАдаптивная нелинейная система управления
Автори російськоюДибская Ирина Юрьевна, Бандура Иван Николаевич, Шпак Ганна Сергеевна
МПК / Мітки
МПК: G05B 13/00
Мітки: адаптивна, система, нелінійна, управління
Код посилання
<a href="https://ua.patents.su/2-44723-adaptivna-nelinijjna-sistema-upravlinnya.html" target="_blank" rel="follow" title="База патентів України">Адаптивна нелінійна система управління</a>
Адаптивна система управління
Номер патенту: 11808
Опубліковано: 16.01.2006
Автори: Симонов Володимир Федорович, Бандура Іван Миколайович, Шемшур Микола Володимирович, Рудико Оксана Вікторівна
МПК: G05B 13/00
Мітки: управління, система, адаптивна
Формула / Реферат:
1. Адаптивна система управління, що містить перший блок інтеграторів, перший блок підсилювачів, об'єкт управління, другий блок інтеграторів, яка відрізняється тим, що в систему введено обчислювач, з'єднаний з виходом пристрою узгодження через блок аналого-цифрових перетворювачів та з входом другого блока інтеграторів через блок цифро-аналогових перетворювачів.2. Адаптивна система управління за п. 1, яка відрізняється тим, що пристрій...
Адаптивна система кутової стабілізації безпілотного літального апарата
Номер патенту: 35826
Опубліковано: 10.10.2008
Автори: Амеліна Ірина Вікторівна, Симонов Володимир Федорович, Бандура Іван Миколайович
МПК: G05D 1/03, B64C 13/00
Мітки: адаптивна, система, стабілізації, безпілотного, літального, апарата, кутової
Формула / Реферат:
Адаптивна система кутової стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, перший суматор, підсилювач, датчик кута, датчик кутової швидкості, обчислювач, до складу якого входять блок вибору нелінійності, перший і другий блоки керування, блок формування керуючих сигналів, другий суматор та перший електронний ключ та фільтр, до складу якого входять компаратор, тригер, елемент затримки, обмежувач рівня сигналу,...
Адаптивна резервована система
Номер патенту: 51152
Опубліковано: 15.11.2002
Автори: Кулік Анатолій Степанович, Дергачов Володимир Андрійович, Доценко Наталія Володимирівна
МПК: G06F 11/18
Мітки: резервована, адаптивна, система
Формула / Реферат:
Адаптивна резервована система, яка має блоки, що резервуються, елементи нерівнозначності, елементи І, пороговий елемент, вихід системи, двійковий лічильник, перший і другий елементи АБО, причому вихід і -го блока, що резервується з'єднаний з першим входом і-го елемента І, вихід і-го елемента нерівнозначності з'єднаний з другим входом і-го елемента І, вихід якого з'єднаний з і-им входом першої групи входів порогового елемента, вихід порогового...
Система управління процесом технічної експлуатації
Номер патенту: 73458
Опубліковано: 15.07.2005
Автори: Пустовий Сергій Олексійович, Семон Богдан Йосипович, Блаженний Валерій Іванович, Волошин Ігор Іванович
МПК: G05B 13/00
Мітки: система, технічної, процесом, експлуатації, управління
Формула / Реферат:
Система управління процесом технічної експлуатації, що містить блок формування мети процесу технічної експлуатації, блок управління законом першого каналу, блок управління законом другого каналу, блок закону управління першого каналу, блок закону управління другого каналу, пристрій управління першого каналу, пристрій управління другого каналу, блок зовнішніх факторів, блок процесу технічної експлуатації і об'єкт експлуатації, яка...
Четвірковий циклічний інвертор
Номер патенту: 37829
Опубліковано: 10.12.2008
Автори: Войцеховська Ольга Олександрівна, Семенова Олена Олександрівна, Семенов Андрій Олександрович
МПК: H03K 19/20
Мітки: циклічний, четвірковий, інвертор
Формула / Реферат:
Четвірковий циклічний інвертор, який містить розподільник потужності, суматор потужності, три балансних модулятори та три смугових фільтри, перший вихід розподільника потужності з'єднаний з входом першого балансного модулятора, вихід якого з'єднаний з входом першого смугового фільтра, вихід якого з'єднаний з першим входом суматора потужності; другий вихід розподільника потужності з'єднаний з входом другого балансного модулятора, вихід якого...
Попередній патент: Спосіб визначення ймовірності розвитку парезу кишечника при реконструктивно-відбудовних операціях після операції типу гартмана
Наступний патент: Високовольтний високочастотний імпульсний трансформатор
Випадковий патент: Спосіб візуалізації локальних полів у метал-діелектричних нанокомпозитних матеріалах