Система для пошуку неоднорідностей в земній корі
Номер патенту: 93794
Опубліковано: 10.03.2011
Автори: Баженов Віктор Григорович, Якимчук Микола Андрійович, Димко Ольга Сергіївна

Формула / Реферат
Система для пошуку неоднорідностей в Землі, яка містить випромінюючу та вимірювальну антени, перетворювач частоти, з'єднаний першим входом з вимірювальною антеною, генератор опорної частоти, блок формування двох сигналів з постійною різницею частот, яка відрізняється тим що додатково містить передавальний та приймальний модулі, причому перша частина блока формування двох сигналів з постійною різницею частот розміщена в передавальному модулі, а друга частина формування двох сигналів з постійною різницею частот - в приймальному, перша частина блока формування двох сигналів з постійною різницею частот, що розміщена в передавальному модулі, містить перший синтезатор частоти, вхід якого підключений до генератора опорної частоти, а вихід з'єднаний з випромінюючою антеною через перший підсилювач потужності, а вхід керування підключений до виходу першого мікроконтролера, крім того передавальний модуль містить перший модуль GPS, вихід якого підключений до входу першого мікроконтролера, а генератор опорної частоти через другий підсилювач потужності підключений до випромінюючої антени опорного сигналу, друга частина блока формування двох сигналів з постійною різницею частот, що розміщена в приймальному модулі, містить другий синтезатор частоти, вхід якого з'єднаний з приймальною антеною опорного сигналу через попередній підсилювач потужності, а вихід підключений до другого входу перетворювача частоти, вхід керування підключений до другого мікроконтролера, при цьому другий синтезатор частоти виконаний з можливістю зміни початкової фази вихідного сигналу, крім того приймальний модуль додатково містить аналого-цифровий перетворювач, дільник частоти, фільтр нижніх частот, другий модуль GPS, персональний комп'ютер, синхронний амплітудний детектор, один вхід якого підключений до виходу дільника частоти з постійним коефіцієнтом ділення, вхід якого підключений до приймальної антени опорного сигналу через попередній підсилювач потужності, при цьому виходи аналого-цифрового перетворювача підключені до входів другого мікроконтролера, керуючий вхід аналого-цифрового перетворювача підключений до другого мікроконтролера, а вхід аналого-цифрового перетворювача - до виходу синхронного амплітудного детектора через фільтр нижніх частот, при цьому другий модуль GPS підключений до персонального комп'ютера, який підключений до другого мікроконтролера.
Текст
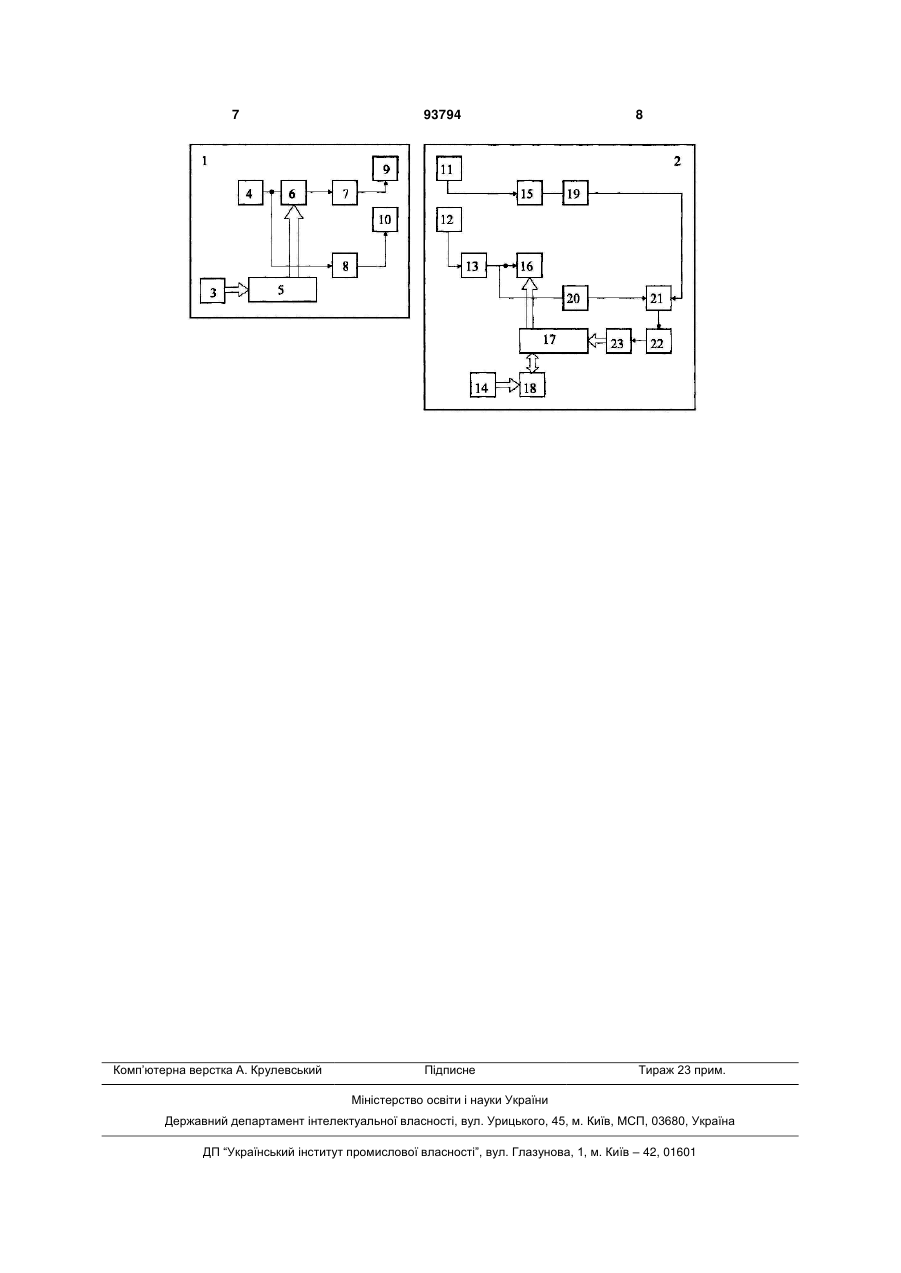
Система для пошуку неоднорідностей в Землі, яка містить випромінюючу та вимірювальну антени, перетворювач частоти, з'єднаний першим входом з вимірювальною антеною, генератор опорної частоти, блок формування двох сигналів з постійною різницею частот, яка відрізняється тим що додатково містить передавальний та приймальний модулі, причому перша частина блока формування двох сигналів з постійною різницею частот розміщена в передавальному модулі, а друга частина формування двох сигналів з постійною різницею частот - в приймальному, перша частина блока формування двох сигналів з постійною різницею частот, що розміщена в передавальному модулі, містить перший синтезатор частоти, вхід якого підключений до генератора опорної частоти, а вихід з'єднаний з випромінюючою антеною через перший підсилювач потужності, а вхід керування C2 2 (11) 1 3 ретворювача, послідовно з'єднані вибірковий підсилювач та вимірювач амплітуд, з'єднаний з виходом перетворювача, другий перетворювач, другий вибірковий підсилювач та фазометр, причому входи другого перетворювача з'єднані з виходами блока формування двох частотно-модульованих сигналів, а другий вхід фазометра з'єднаний з виходом вимірювача амплітуди. Вадами даного обладнання є те, що воно має обмежені функціональні можливості (неможливість використання даного пристрою в випадку виконання амплітудно-фазових електромагнітних вимірювань в рознесених в просторі точках), має низьку точність та завадостійкість за рахунок використання змішувача сигналів і підсилювача проміжної частоти при формуванні опорного сигналу фазометра, які мають велику нестабільність фазочастотних характеристик, крім того опорний сигнал отриманий таким чином не є синусоїдальним і має дуже складний спектр, тому неможливо забезпечити високу точність вимірювання фазового зсуву синусоїдального сигналу заданої частоти, а також має дуже складну апаратурну реалізацію. В основу винаходу поставлена задача вдосконалення пристрою для пошуку неоднорідностей в земній корі шляхом розширення функціональних можливостей в випадках виконання вимірювань в рознесених в просторі точках. Поставлена задача вирішується тим, що система для пошуку неоднорідностей в Землі, яка містить випромінюючу та вимірювальну антени, перетворювач, сполучений першим входом з вимірювальною антеною, генератор опорної частоти, блок формування двох сигналів з постійною різницею частот, згідно з винаходом, система містить передавальний та приймальний модулі, причому частина блоку формування двох сигналів з постійною різницею частот знаходиться в передавальному модулі, а частина в приймальному, причому перша частина блока формування двох сигналів з постійною різницею частот, що міститься в передавальному модулі, містить перший синтезатор частоти, вхід якого підключено до генератора опорної частоти, а вихід з'єднано з випромінюючою антеною через перший підсилювач потужності, а вхід управління підключено до виходу першого мікроконтролера, крім того передавальний модуль містить перший модуль GPS, вихід якого підключено до входу першого мікроконтролера, а генератор опорної частоти через другий підсилювач потужності підключено до випромінюючої антени опорного сигналу, друга частину блоку формування двох сигналів з постійною різницею частот, що міститься в приймальному модулі, включає в себе другий синтезатор частоти, опорний вхід якого з'єднано з приймальною антеною опорного сигналу через попередній підсилювач, а вихід підключено до другого входу перетворювача, вхід управління підключено до другого мікроконтролера, при цьому другий синтезатор частоти виконаний з можливістю зміни початкової фази вихідного сигналу, крім того в приймальному модулі додатково міститься аналого-цифровий перетворювач, дільник частоти, фільтр нижніх частот, другий модуль GPS, персональний комп'ютер, синхронний амплі 93794 4 тудний детектор, один вхід якого підключений до виходу дільника частоти з постійним коефіцієнтом ділення, вхід якого підключено до приймальної антени опорного сигналу через попередній підсилювач потужності, при цьому виходи аналогоцифрового перетворювача підключено до входів другого мікроконтролера, керуючий вхід аналогоцифрового перетворювача підключено до другого мікроконтролера, а вхід аналого-цифрового перетворювача до виходу синхронного амплітудного детектора через фільтр нижніх частот, при цьому другий модуль GPS підключено до персонального комп'ютера, який підключено до другого мікроконтролера. Суть винаходу пояснюється кресленням, де зображена структурна схема системи для пошуку неоднорідностей в земній корі, в масивах гірських порід. Структурна схема містить два модулі: передавальний 1 та приймальний 2, блок формування двох сигналів з постійною різницею частоти виконаний на базі двох синтезаторів частоти 6 і 16 (керованих по частоті за допомогою двох мікроконтролерів 5 і 17, які синхронізуються за допомогою двох модулів GPS 3 і 14 відповідно, при цьому другий синтезатор частоти 16 виконаний з можливістю зміни початкової фази вихідного сигналу), підключених до одного генератора опорної частоти 4, причому опорний сигнал з генератора подається на вхід першого синтезатора 6, а також через другий підсилювач потужності 8 на випромінюючу антену опорного сигналу 10, який подається на вхід другого синтезатора 16 в приймальному блоці з приймальної антени опорного сигналу 12 через попередній підсилювач 13. Вихід першого синтезатора частоти 6 підключено до входу першого підсилювача потужності 7, до виходу якого підключена випромінююча антена 9 вимірювального сигналу. Вихід другого синтезатора частоти 16 підключено до другого входу перетворювача частоти 15, перший вхід якого з'єднано з вимірюючою антеною 11 вимірювального сигналу. Вихід перетворювача 15 підключено до входу вибіркового підсилювача 19, вихід якого підключено до одного із входів синхронного амплітудного детектора 21, другий вхід якого підключено до виходу дільника частоти 20 синусоїдального сигналу, на вхід якого подається сигнал опорної частоти. Вихід синхронного амплітудного детектора підключено через фільтр нижніх частот 22 до аналогового входу аналого-цифрового перетворювача 23, керованого другим мікроконтролером 17, причому вихід другого мікроконтролера 17 з'єднано також зі входом керування другого синтезатора частоти 16, а вхід - з цифровими виходами аналого-цифрового перетворювача 23. Накопичення і обробка вимірювальної інформації, а також керування всією системою вимірювання виконується за допомогою комп'ютера 18, підключеного до другого мікроконтролера 17. Система вимірювання складається з двох модулів: передавального 1 та приймального 2, які можуть бути рознесені в просторі на будь-яку відстань при виконанні вимірювань. Запуск системи, а також моменти часу зміни частот двох синтезато 5 рів 6 і 16, рознесених в просторі, синхронізується за допомогою двох модулів GPS 3 та 14, які знаходяться відповідно в передавальному та приймальному модулях, при цьому другий синтезатор частоти 16 виконаний з можливістю зміни початкової фази вихідного сигналу. Блок формування двох сигналів з постійною різницею частот подає вимірювальний сигнал заданої частоти з першого синтезатора частоти 6, що керується першим мікроконтролером 5, через перший підсилювач потужності 7 на випромінюючу антену 9. Опорний сигнал фіксованої частоти подається з генератора опорної частоти 4 на вхід першого синтезатора частоти 6, а також через другий підсилювач потужності 8 на випромінюючу антену опорного сигналу 10. Вимірювальний сигнал, що випромінює випромінююча антена 9, створює в навколишньому просторі електромагнітне поле. Це поле, проходячи через масив гірських порід, індукує в них вихрові струми, які, у свою чергу, створюють вторинне електромагнітне поле, амплітуда і фазовий зсув якого залежить як від електричних властивостей масиву гірських порід, так і від наявних в ньому неоднорідностей. Вторинне електромагнітне поле приймається вимірювальною антеною 11 приймального модуля, і надходить на перший вхід перетворювача 15. На другий вхід цього ж перетворювача надходить сигнал заданої частоти (з фіксованою різницею від частоти синтезатора 6) з другого синтезатора частоти 16, що керується за допомогою другого мікроконтролера 17, причому опорний сигнал фіксованої частоти з генератора 4 надходить на вхід сигналу 12, через попередній підсилювач 13. Перетворювач частоти 15 виділяє сигнал проміжної частоти (частота якого залишається фіксованою у всьому діапазоні зміни частот вимірювальних сигналів, що випромінюються антеною 9). Сигнал фіксованої проміжної частоти виділяється вибірковим підсилювачем 19 і подається на перший вхід синхронного амплітудного детектора 21, на другий вхід якого подається сигнал такої ж частоти, який отримується з дільника частоти 20 сигналу опорної частоти. На виході синхронного амплітудного детектора 21 за допомогою фільтра 22 отримується сигнал постійної напруги, значення якої буде пропорційне амплітуді та фазі вимірювального сигналу. Отриманий сигнал постійної напруги з фільтра нижніх частот 22 перетворюється в код за допомогою аналого-цифрового перетворювача 23, керованого другим мікроконтролером 17, запуск якого синхронізується за допомогою другого модуля GPS 14, подається на цифрові входи порту другого мікроконтролера 17. Оскільки сигнал пропорційний амплітуді та фазі, то для вимірювання амплітуди цього сигналу за допомогою програми мікроконтролера виконується підстройка по фазі другого синтезатора 16, доки на виході фільтра нижніх частот 22 не буде максимальна амплітуда сигналу. При цьому значення коду на 93794 6 виході аналого-цифрового перетворювача 23 буде відповідати амплітуді сигналу, а значення коду підстройки фази другого синтезатора 16, яке забезпечується другим мікроконтролером 17, при якому настав максимум амплітуди, буде відповідати зсуву фаз вимірювального сигналу. Оскільки швидкість розповсюдження у повітряному просторі опорного сигналу значно вища, ніж швидкість розповсюдження вимірювального сигналу в земній корі, то зсувом фази опорного сигналу можна знехтувати або скорегувати, використовуючи дані, отримані модулями GPS 3 і 14, та розрахувати відстань між модулями і, знаючи швидкість розповсюдження радіохвилі у повітряному просторі, розрахувати затримку опорного сигналу. Таким чином, система вимірювання, що пропонується, є багатофункціональною та дозволяє виконувати вимірювання зміни амплітуд і фаз сигналів в земній корі на покроково-змінюваних різних частотах між рознесеними в просторі точками, причому фактично буде реалізовуватись найбільш точний у вимірювальній техніці компенсаційний метод вимірювання фази сигналу, при тому без використання безпосередньо фазометра. Все це можливо завдяки тому, що для першого 6 та другого 16 синтезаторів частоти використовується один спільний опорний генератор 4, і отримуємо фактично когерентні сигнали різних частот з обох синтезаторів. Особливо слід відзначити, що запропонований пристрій має підвищену завадостійкість завдяки тому, що вимірювальний сигнал постійної напруги, який отримується на виході синхронного амплітудного детектора, буде пропорційний параметрам (амплітуді і фазі) тільки першій гармоніці вимірювального сигналу, отриманого антеною 11, бо на вхід синхронного амплітудного детектора з дільника частоти 20 подається синусоїдальний сигнал. Крім того пристрій може мати підвищену чутливість а також завадостійкість завдяки тому, що підсилення прийнятого сигналу виконується фактично на фіксованій частоті за допомогою вузькосмугового підсилювача проміжної частоти 19, який в цьому випадку може мати великий коефіцієнт підсилення і дуже малий рівень шумів. Слід також відзначити, що прецизійне вимірювання фази прийнятого сигналу виконується фактично без використання окремого дорогого приладу - фазометра тому, що, як було сказано вище, результат вимірювання зсуву фаз отримується як побічний продукт при вимірюванні амплітуди. Це значно спрощує апаратурну реалізацію пристрою, зменшує габарити і енергоспоживання, що, в свою чергу, робить пристрій мобільним. Як синтезатори частоти можуть бути використані, наприклад, мікросхеми AD9834, що реалізують метод DDS і можуть генерувати сигнали в діапазоні частот від 0 до 50 МГц з можливістю зміни не тільки частоти, але й початкової фази сигналу з дуже малим дискретом за командами мікроконтролерів. 7 Комп’ютерна верстка А. Крулевський 93794 8 Підписне Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem fo search of heterogeneities in earths crust
Автори англійськоюBazhenov Viktor Hryhorovych, Yakymchuk Mykola Andriiovych, Dymko Olha Serhiivna
Назва патенту російськоюСистема для поиска неоднородностей b земной kope
Автори російськоюБаженов Виктор Григорьевич, Якимчук Николай Андреевич, Димко Ольга Сергеевна
МПК / Мітки
МПК: G01V 3/10
Мітки: корі, неоднорідностей, земній, пошуку, система
Код посилання
<a href="https://ua.patents.su/4-93794-sistema-dlya-poshuku-neodnoridnostejj-v-zemnijj-kori.html" target="_blank" rel="follow" title="База патентів України">Система для пошуку неоднорідностей в земній корі</a>
Система для пошуку неоднорідностей в земній корі
Номер патенту: 50747
Опубліковано: 25.06.2010
Автори: Баженов Віктор Григорович, Якимчук Микола Андрійович, Димко Ольга Сергіївна
МПК: G01V 3/10
Мітки: пошуку, система, корі, земній, неоднорідностей
Формула / Реферат:
Система для пошуку неоднорідностей в земній корі, яка містить випромінюючу та вимірювальну антени, перетворювач, з'єднаний першим входом з вимірювальною антенною, генератор опорної частоти, блок формування двох сигналів з постійною різницею частот, який відрізняється тим, що система містить передавальний та приймальний модулі, причому частина блока формування двох сигналів з постійною різницею частот знаходиться в передавальному модулі, а...
Пристрій для пошуку неоднорідностей в земній корі
Номер патенту: 45905
Опубліковано: 25.11.2009
Автори: Баженов Віктор Григорович, Димко Ольга Сергіївна, Якимчук Микола Андрійович
МПК: G01V 3/10
Мітки: пристрій, корі, земній, неоднорідностей, пошуку
Формула / Реферат:
Пристрій для пошуку неоднорідностей в земній корі, в масивах гірських порід, який містить випромінюючу та вимірювальну антени, перетворювач, сполучений першим входом з вимірювальною антеною, блок формування двох сигналів з постійною різницею частот, що містить генератор опорної частоти і сполучений першим виходом з випромінюючою антеною через підсилювач потужності та другим виходом з другим входом перетворювача, при цьому вихід перетворювача...
Пристрій для пошуку неоднорідностей в земній корі
Номер патенту: 91161
Опубліковано: 25.06.2010
Автори: Якимчук Микола Андрійович, Димко Ольга Сергіївна, Баженов Віктор Григорович
МПК: G01V 3/10
Мітки: земній, пошуку, корі, неоднорідностей, пристрій
Формула / Реферат:
Пристрій для пошуку неоднорідностей в земній корі та масивах гірських порід, який містить випромінюючу та вимірювальну антени, перетворювач, перший вхід якого з'єднаний з вимірювальною антеною, блок формування двох сигналів з постійною різницею частот, що містить генератор опорної частоти, перший вихід якого з'єднаний з випромінюючою антеною через підсилювач потужності, а другий вихід - з другим входом перетворювача, при цьому вихід...
Спосіб визначення напрямку і відносної амплітуди максимального горизонтального напруження у земній корі
Номер патенту: 74824
Опубліковано: 15.02.2006
Автор: Девідсон Джон Кеннет
МПК: G01V 1/28, G01V 11/00
Мітки: горизонтального, максимального, амплітуди, напрямку, відносної, напруження, корі, спосіб, визначення, земній
Формула / Реферат:
1. Спосіб визначення напрямку максимального горизонтального напруження (SH) у горизонті перспективного родовища, який включає такі операції:а) одержання сукупності ліній сейсмічного відбиття у цьому перспективному родовищі,б) вибирання щонайменше двох ліній сейсмічного відбиття, які перетинають перспективне родовище, по суті, у напрямку максимального падіння,в) вибирання щонайменше ще однієї лінії сейсмічного відбиття,...
Спосіб пошуку неоднорідностей щільності речовини

Номер патенту: 27578
Опубліковано: 12.11.2007
Автори: Казьоннова Ніна Іванівна, Кочергін Олександр Васильович, Мороз Микола Георгійович
МПК: G01N 23/20
Мітки: спосіб, неоднорідностей, речовини, пошуку, щільності
Формула / Реферат:
Спосіб пошуку неоднорідностей щільності речовини, що включає реєстрацію зворотно-розсіяного γ-випромінювання та режими калібрування і пошуку, а алгоритм вимірювання параметрів сигналу та обробки їх процесором має поріг спрацьовування, який відрізняється тим, що в цей алгоритм введені додаткові пороги спрацьовування верхні та нижні
Попередній патент: Дверний замок
Наступний патент: Залізнична платформа
Випадковий патент: Спосіб лікування генералізованого пародонтиту при цукровому діабеті типу 2