Пристрій для моделювання фізичних об’єктів
Номер патенту: 59086
Опубліковано: 10.05.2011
Автори: Татарінов Олексій Едуардович, Бабак Олег Володимирович, Суровцев Ігор Вікторович

Формула / Реферат
Пристрій для моделювання фізичних об'єктів, який містить інтерполятор, з'єднаний з коректором, який відрізняється тим, що він містить блок введення даних, блок індикації напрямку складових градієнта лінійної функції відгуку, блок комбінаторного перебору моделей-претендентів, другий інтерполятор, датчик якості моделі, при цьому інтерполятор виходом підключений до першого входу блока індикації напрямку складових градієнта лінійної функції відгуку, другий вхід якого з'єднаний з виходом блока введення даних, а вихід блока індикації напрямку складових градієнта лінійної функції відгуку підключений до першого входу блока комбінаторного перебору моделей-претендентів, вихід якого з'єднаний з входом другого інтерполятора, який з'єднаний з першим входом коректора, до другого входу якого підключений задатчик якості моделі, причому вихід коректора з'єднаний з другим входом блока комбінаторного перебору моделей-претендентів.
Текст
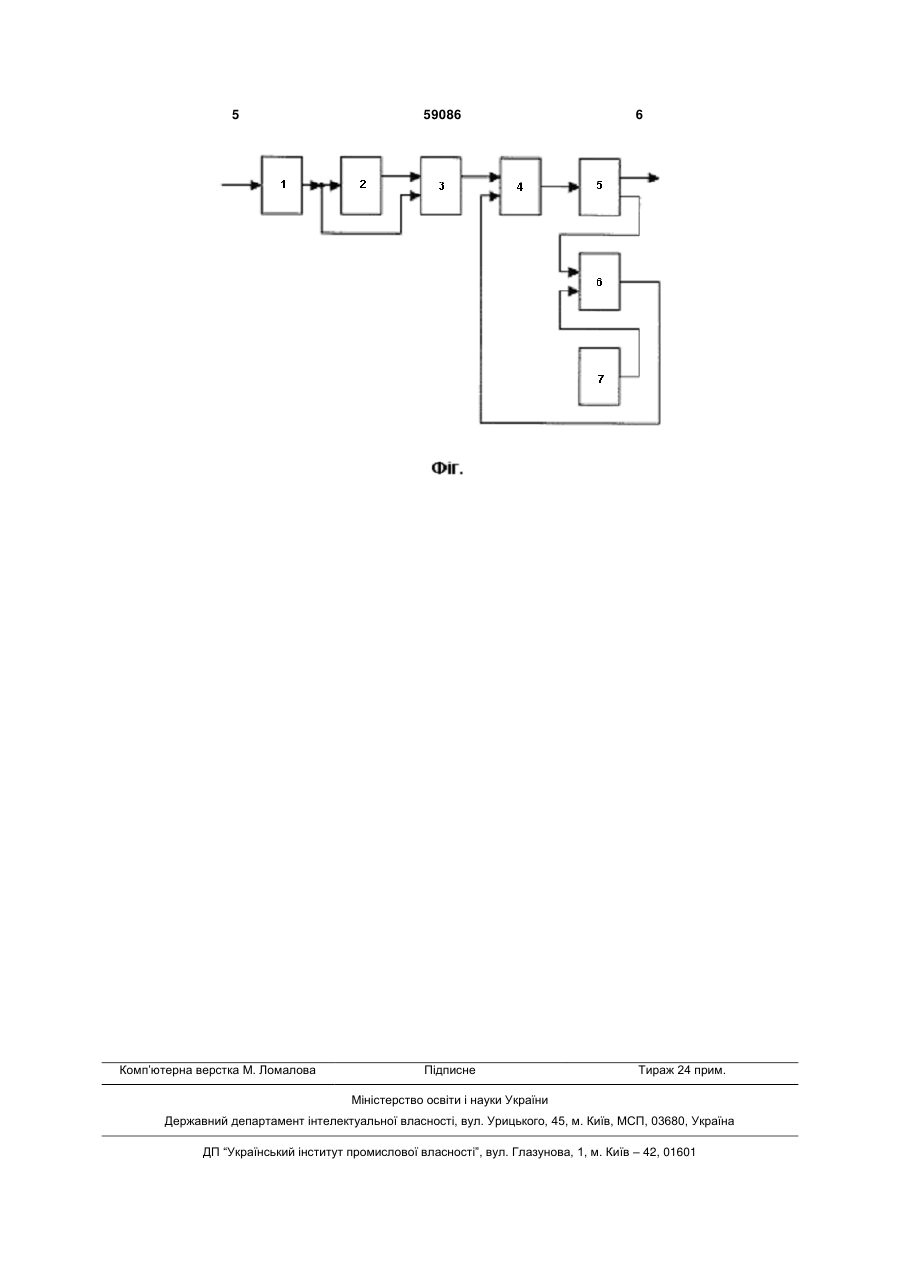
Пристрій для моделювання фізичних об'єктів, який містить інтерполятор, з'єднаний з коректором, який відрізняється тим, що він містить блок введення даних, блок індикації напрямку складових градієнта лінійної функції відгуку, блок комбінатор 3 ключений до першого входу блока 4 комбінаторного перебору моделей-претендентів, вихід якого з'єднаний зі входом другого інтерполятора 5, з'єднаного з першим входом коректора 6, до входу якого підключений задатчик 7 якості моделі, причому вихід коректора 6 з'єднаний з другим входом блока 4 комбінаторного перебору моделейпретендентів. Пристрій працює наступним чином. Вихідні дані, у вигляді електричних сигналів надходять з нелінійного фізичного об'єкта до блоку введення даних 1 у вигляді навчальної вибірки (1) x ij, y , i 1, n, j 1, l , де x - незалежні змінні, y - залежна змінна (відгук), n - залежна змінна (відгук), l - довжина вибірки. Вихід блока 1 даних з'єднаний з входом першого інтерполятора 2, котрий за даним методом найменших квадратів (МНК) відновлює лінійну функцію відгуку N y a 0 a i x i , (2) i 1 (a - оцінки коефіцієнтів) При цьому знаки „плюс" та „мінус" при оцінках коефіцієнтів ai вказують на напрямок складових градієнта лінійної функції відгуку, що відображає характер (зменшення або збільшення функції відгуку) фізичних властивостей об'єкта. З виходу першого інтерполятора 2 інформація про напрямки складових градієнта надходить до першого входу блоку 3 індикації напрямку складових градієнта лінійної функції, до другого входу котрого надходять дані (1) з виходу блока 1 введення даних. При цьому в блоці 3 відбувається перетворення до виду 1 (3) x ij , y , i 1, n, j 1, l , Таким чином, степінь при x в залежності від напрямку складових градієнта лінійної функції відгуку (2) може приймати значення ±1. Приклад 1. Отримана функція відгуку y a 0 a1x1 a 2 x 2 . Тоді данні (3) з точки зору напрямку складових градієнта приймають вид 59086 4 x 1, x 1, y , j 1 l . , 1j 2 j Перетворені дані з блоку 3 надходять до входу блоку 4 комбінаторного перебору моделейпретендентів, в якому послідовно генеруються моделі-претенденти. Приклад 2. У випадку даних прикладу 1 маємо наступні моделі-претенденти, що генеруються: y b0 b1x1 b 2 x 1 , 2 y b 0 b1x1 b1 2 x1x 1 , , 2 y b 0 b 2 x 1 b1 2 x1x 1 , , 2 2 y b 0 b1 2 x1x 1 . , 2 Перетворені дані та моделі-претенденти з блоку 4 послідовно надходять до входу другого інтерполятора 5, забезпеченого засобами відображення моделі-претендента. Із виходу другого інтерполятора 5 послідовно формується сигнал похибки, наприклад, у виді 2 l y y , (4) j j j 1 де y - значення y, що прогнозується моделлю. Сигнал похибки (4) послідовно надходить до першого входу коректора 6, до другого входу котрого надходить сигнал заданої похибки із за датчика 7. У коректорі 6 відбувається порівняння сигналів і З виходу коректора 6 сигнал порівняння послідовно допустимого значення доп комбінаторний перебір завершується. При цьому знайдений при доп модель-претендент вказується засобом відображення інтерполятора 5. З викладеного випливає, що пристрій, який пропонується, може бути реалізоване з допомогою існуючих в теперішній час технічних засобів електронної та обчислювальної техніки, а також можливостей побудови відповідного програмного забезпечення. 5 Комп’ютерна верстка М. Ломалова 59086 6 Підписне Тираж 24 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for modeling physical objects
Автори англійськоюBabak Oleh Volodymyrovych, Surovtsev Ihor Viktorovych, Tatarinov Oleksii Eduardovych
Назва патенту російськоюУстройство для моделирования физических объектов
Автори російськоюБабак Олег Владимирович, Суровцев Игорь Викторович, Татаринов Алексей Эдуардович
МПК / Мітки
МПК: G01D 1/00
Мітки: пристрій, фізичних, моделювання, об'єктів
Код посилання
<a href="https://ua.patents.su/3-59086-pristrijj-dlya-modelyuvannya-fizichnikh-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Пристрій для моделювання фізичних об’єктів</a>
Пристрій для моделювання імовірності відмов технічної системи
Номер патенту: 34309
Опубліковано: 15.02.2001
Автор: Зеленков Олександр Аврамович
МПК: G06G 7/52, G06F 15/00, G06G 7/48
Мітки: технічної, системі, моделювання, імовірності, пристрій, відмов
Текст:
...до першого входу третьої схеми І 14, другий вхід якої підключений до виходу другого генератора 15 тактових імпульсів, а вихід підключений до входу віднімання третього лічильника 16, вхід скидання якого підключений до виходу першої схеми АБО 11. Вихід третього лічильника 16 з'єднаний із адресними входами постійних запам'ятовуючих пристроїв 171...17r і підключений до входу ци фро - аналогового перетворювача 18, вихід якого підключений...
Пристрій для моделювання та оптимізації екологічної системи
Номер патенту: 6761
Опубліковано: 16.05.2005
Автори: Гайдусь Андрій Юрійович, Путятін Валерій Петрович
Мітки: екологічної, оптимізації, моделювання, системі, пристрій
Формула / Реферат:
Пристрій для моделювання та оптимізації екологічної системи, який містить R-сітку, блок завдання граничних умов, блок струмовводів, блок порівняння, блок допустимого значення поля, формувача імпульсу, блок реєстрації, при цьому перша група входів R-сітки підключена до групи виходів блока струмовводів, друга група входів R-сітки підключена до групи виходів блока завдання граничних умов, вихід блока допустимих значень поля підключено до входу...
Пристрій для моделювання імовірносного графа
Номер патенту: 34114
Опубліковано: 15.02.2001
Автор: Зеленков Олександр Аврамович
Мітки: імовірносного, пристрій, графа, моделювання
Текст:
...до виходу лічильника. На фіг. 1 показано блок-схему пристрою, а на фіг. 2 - приклад імовірнісного графа. Вихід першого регістра 1 з'єднаний з адресними входами відповідно першого 2, другого 3, третього 4 ПЗП і з входом формувача 5. Вихід першого ПЗП 2 з'єднаний з першим входом першої схеми порівняння 6, другий вхід якої підключено до виходу першого генератора випадкових сигналів 7, вхід якого підключений до виходу формувача 5. Перший і...
Пристрій для моделювання оцінки надійності програмних засобів
Номер патенту: 36399
Опубліковано: 16.04.2001
Автор: Зеленков Олександр Аврамович
МПК: G06G 7/48
Мітки: пристрій, надійності, оцінки, програмних, моделювання, засобів
Текст:
...до виходу третього ПЗП 4. Виходи першої 9 і другої 10 схем І підключені відповідно до першого і другого входів др угого елемента АБО 11, вихід якого підключений до першого входу другої схеми порівняння 12 і інформаційного входу першого регістра 1, вхід скидання якого з'єднаний із входом лічильника 13. Інформаційний вхід накопичуючого суматора 14 підключено до виходу четвертого ПЗП 5, а вихід з'єднаний з першим входом блока ділення 16,...
Пристрій для моделювання параметрів джерела забруднення екологічної системи
Номер патенту: 6762
Опубліковано: 16.05.2005
Автори: Гайдусь Андрій Юрійович, Путятін Валерій Петрович
Мітки: екологічної, джерела, пристрій, забруднення, параметрів, моделювання, системі
Формула / Реферат:
Пристрій для моделювання параметрів джерела забруднення екологічної системи, що містить R-сітку, блок задання інтенсивностей джерел фізичного поля, блок порівняння, блок задання допустимого значення поля, блок реєстрації, суматор, блок задання граничних умов, вихід якого підключено до входу R-сітки, група виходів якої з'єднана з групою входів блока порівняння, вихід якого підключено до першого входу суматора, другий вхід якого підключено до...
Попередній патент: Спосіб прогнозування загрози переривання вагітності в 1 триместрі
Наступний патент: Спосіб підвищення продуктивності молодняку свиней
Випадковий патент: Спосіб пластики дефектів діафізів довгих кісток кінцівок