Система узгодження стадій багатостадійного технологічного процесу дроблення руди

Формула / Реферат
Система узгодження стадій багатостадійного технологічного процесу дроблення руди, що складається з дробарок суміжних стадій, встановленого в тракті переміщення руди між дробарками попередньої та наступної стадій проміжного бункера з отворами для завантаження та вивантаження продукту дроблення з закріпленим датчиком фіксації рівня руди, що підключений до автоматизованої системи керування рівнем запасів руди в бункері, вихід якої з'єднаний з автоматизованою системою керування дробарками попередньої стадії, яка відрізняється тим, що отвір для вивантаження руди в дробарки наступної стадії розташований в нижній частині проміжного бункера оснащується дозатором, а автоматизована система керування рівнем запасів руди в бункері складається з блоків задання нижнього та верхнього рівня руди, які підключені до першого та другого входів блока формування сигналу задання на поповнення бункера, третій вхід якого з'єднаний з датчиком фіксації рівня руди, вихід блока керування продуктивністю дозатора підключений до дозатора, а його входи - до виходу датчика фіксації рівня руди в бункері і до першого та другого виходів системи керування дробарками наступної стадії, з'єднаної з виходом витратоміра, встановленого в каналі переміщення руди з проміжного бункера в дробарки наступної стадії, вихід блока формування сигналу задання на поповнення бункера підключений до першого входу автоматизованої системи керування дробарками попередньої стадії; другий вхід якої з'єднаний з виходом витратоміра, що встановлений в каналі переміщення руди з дробарок попередньої стадії в бункер.
Текст
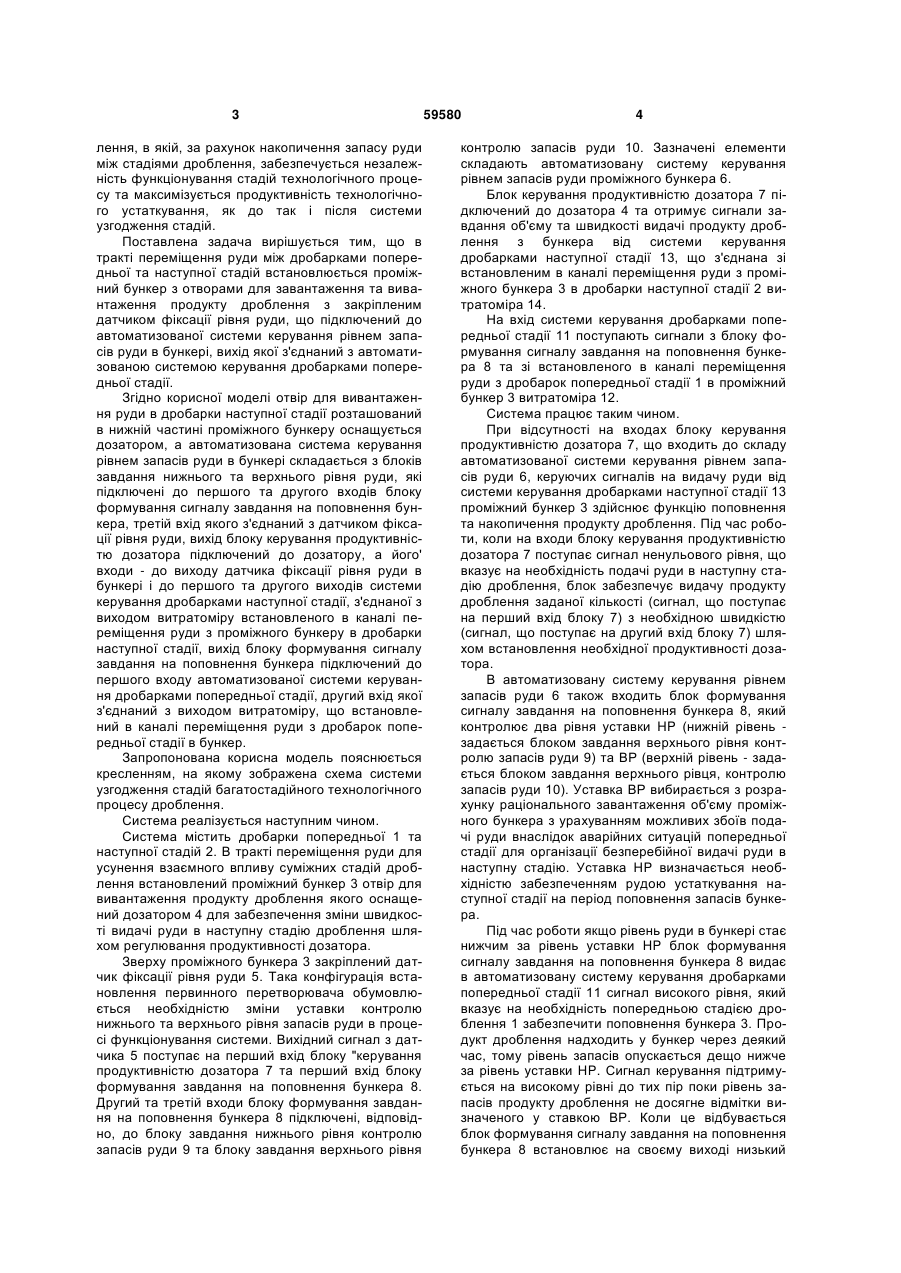
Система узгодження стадій багатостадійного технологічного процесу дроблення руди, що складається з дробарок суміжних стадій, встановленого в тракті переміщення руди між дробарками попередньої та наступної стадій проміжного бункера з отворами для завантаження та вивантаження продукту дроблення з закріпленим датчиком фіксації рівня руди, що підключений до автоматизованої системи керування рівнем запасів руди в бункері, вихід якої з'єднаний з автоматизованою системою керування дробарками попередньої стадії, яка відрізняється тим, що отвір для вивантаження руди в дробарки наступної стадії розташований в нижній частині проміжного бункера U 1 3 лення, в якій, за рахунок накопичення запасу руди між стадіями дроблення, забезпечується незалежність функціонування стадій технологічного процесу та максимізується продуктивність технологічного устаткування, як до так і після системи узгодження стадій. Поставлена задача вирішується тим, що в тракті переміщення руди між дробарками попередньої та наступної стадій встановлюється проміжний бункер з отворами для завантаження та вивантаження продукту дроблення з закріпленим датчиком фіксації рівня руди, що підключений до автоматизованої системи керування рівнем запасів руди в бункері, вихід якої з'єднаний з автоматизованою системою керування дробарками попередньої стадії. Згідно корисної моделі отвір для вивантаження руди в дробарки наступної стадії розташований в нижній частині проміжного бункеру оснащується дозатором, а автоматизована система керування рівнем запасів руди в бункері складається з блоків завдання нижнього та верхнього рівня руди, які підключені до першого та другого входів блоку формування сигналу завдання на поповнення бункера, третій вхід якого з'єднаний з датчиком фіксації рівня руди, вихід блоку керування продуктивністю дозатора підключений до дозатору, а його' входи - до виходу датчика фіксації рівня руди в бункері і до першого та другого виходів системи керування дробарками наступної стадії, з'єднаної з виходом витратоміру встановленого в каналі переміщення руди з проміжного бункеру в дробарки наступної стадії, вихід блоку формування сигналу завдання на поповнення бункера підключений до першого входу автоматизованої системи керування дробарками попередньої стадії, другий вхід якої з'єднаний з виходом витратоміру, що встановлений в каналі переміщення руди з дробарок попередньої стадії в бункер. Запропонована корисна модель пояснюється кресленням, на якому зображена схема системи узгодження стадій багатостадійного технологічного процесу дроблення. Система реалізується наступним чином. Система містить дробарки попередньої 1 та наступної стадій 2. В тракті переміщення руди для усунення взаємного впливу суміжних стадій дроблення встановлений проміжний бункер 3 отвір для вивантаження продукту дроблення якого оснащений дозатором 4 для забезпечення зміни швидкості видачі руди в наступну стадію дроблення шляхом регулювання продуктивності дозатора. Зверху проміжного бункера 3 закріплений датчик фіксації рівня руди 5. Така конфігурація встановлення первинного перетворювача обумовлюється необхідністю зміни уставки контролю нижнього та верхнього рівня запасів руди в процесі функціонування системи. Вихідний сигнал з датчика 5 поступає на перший вхід блоку "керування продуктивністю дозатора 7 та перший вхід блоку формування завдання на поповнення бункера 8. Другий та третій входи блоку формування завдання на поповнення бункера 8 підключені, відповідно, до блоку завдання нижнього рівня контролю запасів руди 9 та блоку завдання верхнього рівня 59580 4 контролю запасів руди 10. Зазначені елементи складають автоматизовану систему керування рівнем запасів руди проміжного бункера 6. Блок керування продуктивністю дозатора 7 підключений до дозатора 4 та отримує сигнали завдання об'єму та швидкості видачі продукту дроблення з бункера від системи керування дробарками наступної стадії 13, що з'єднана зі встановленим в каналі переміщення руди з проміжного бункера 3 в дробарки наступної стадії 2 витратоміра 14. На вхід системи керування дробарками попередньої стадії 11 поступають сигнали з блоку формування сигналу завдання на поповнення бункера 8 та зі встановленого в каналі переміщення руди з дробарок попередньої стадії 1 в проміжний бункер 3 витратоміра 12. Система працює таким чином. При відсутності на входах блоку керування продуктивністю дозатора 7, що входить до складу автоматизованої системи керування рівнем запасів руди 6, керуючих сигналів на видачу руди від системи керування дробарками наступної стадії 13 проміжний бункер 3 здійснює функцію поповнення та накопичення продукту дроблення. Під час роботи, коли на входи блоку керування продуктивністю дозатора 7 поступає сигнал ненульового рівня, що вказує на необхідність подачі руди в наступну стадію дроблення, блок забезпечує видачу продукту дроблення заданої кількості (сигнал, що поступає на перший вхід блоку 7) з необхідною швидкістю (сигнал, що поступає на другий вхід блоку 7) шляхом встановлення необхідної продуктивності дозатора. В автоматизовану систему керування рівнем запасів руди 6 також входить блок формування сигналу завдання на поповнення бункера 8, який контролює два рівня уставки HP (нижній рівень задається блоком завдання верхнього рівня контролю запасів руди 9) та ВР (верхній рівень - задається блоком завдання верхнього рівця, контролю запасів руди 10). Уставка ВР вибирається з розрахунку раціонального завантаження об'єму проміжного бункера з урахуванням можливих збоїв подачі руди внаслідок аварійних ситуацій попередньої стадії для організації безперебійної видачі руди в наступну стадію. Уставка HP визначається необхідністю забезпеченням рудою устаткування наступної стадії на період поповнення запасів бункера. Під час роботи якщо рівень руди в бункері стає нижчим за рівень уставки HP блок формування сигналу завдання на поповнення бункера 8 видає в автоматизовану систему керування дробарками попередньої стадії 11 сигнал високого рівня, який вказує на необхідність попередньою стадією дроблення 1 забезпечити поповнення бункера 3. Продукт дроблення надходить у бункер через деякий час, тому рівень запасів опускається дещо нижче за рівень уставки HP. Сигнал керування підтримується на високому рівні до тих пір поки рівень запасів продукту дроблення не досягне відмітки визначеного у ставкою ВР. Коли це відбувається блок формування сигналу завдання на поповнення бункера 8 встановлює на своєму виході низький 5 59580 рівень сигналу 10, що вказує на необхідність припинення подачі руди попередньою стадією дроблення. Таким чином система керування рівнем руди в буферному бункері працює з двома рівнями запасів мінімальним і максимальним. Витратоміри 12, 14 встановлені в трактах переміщення руди для вимірювання витрат потоку Комп’ютерна верстка Г. Паяльніков 6 руди довільної продуктивності. Виходи витратомірів підключені до автоматизованих систем керування дробарками 11, 13, які контролюють задані витрати і керують живленням за допомогою передачі сигналів завдання об'єму та швидкості системам керування продуктивністю дозаторів проміжних бункерів суміжних стадій дроблення. Підписне Тираж 24 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem of matching stages of multistage ore crushing process
Автори англійськоюMykhailenko Oleksii Yuriiovych
Назва патенту російськоюСистема согласования стадий многостадийного технологического процесса дробления руды
Автори російськоюМихайленко Алексей Юрьевич
МПК / Мітки
МПК: B22F 9/04
Мітки: система, технологічного, стадій, узгодження, руди, багатостадійного, процесу, дроблення
Код посилання
<a href="https://ua.patents.su/3-59580-sistema-uzgodzhennya-stadijj-bagatostadijjnogo-tekhnologichnogo-procesu-droblennya-rudi.html" target="_blank" rel="follow" title="База патентів України">Система узгодження стадій багатостадійного технологічного процесу дроблення руди</a>
Система оперативного контролю якості товарної руди при відвантаженні споживачам
Номер патенту: 20142
Опубліковано: 15.01.2007
Автори: Трачук Аннаіт Альбертівна, Азарян Альберт Арамаісович, Азарян Раіса Степанівна
МПК: B03B 13/00
Мітки: відвантаженні, споживачам, руди, оперативного, товарної, якості, контролю, система
Формула / Реферат:
Система оперативного контролю якості товарної руди при відвантаженні споживачам, що містить блок хімічного аналізу, блок збору даних, блок керування навантаженням, блок сертифіката відвантаження, конус товарної руди, екскаватор для навантаження товарної руди і залізничні вагони, яка відрізняється тим, що система містить каротажний зондовий пристрій, рудничний радіометр, центральний процесор, комплексний вимірювальний пристрій і локальну...
Спосіб вдування здрібненої на малі частинки залізної руди під час плавильно-відновлювального процесу
Номер патенту: 43397
Опубліковано: 17.12.2001
Автори: ЛІ Санг Деок, Валлнер Фелікс, Джу Санг Хун, Лі Іл Ок, Кепплінгер Вернер Л.
МПК: C22B 5/14, C21B 13/14
Мітки: спосіб, частинки, залізної, руди, здрібненої, процесу, плавильно-відновлювального, вдування, малі
Формула / Реферат:
1. Спосіб вдування здрібненої на малі частинки залізної руди під час плавильно - відновлювального процесу, що містить операції попереднього відновлення залізної руди в печі (12) попереднього відновлення з використанням випускного газу, виробленого в плавильному газифікаторі (11), розплавлення і відновлення попередньо відновленої залізної руди в указаному плавильному газифікаторі (11), подавання випускного газу плавильного газифікатора (11)...
Пристрій для автоматичного збору і обробки діагностичної інформації про технічний стан обладнання і хід технологічного процесу
Номер патенту: 76510
Опубліковано: 15.08.2006
Автори: Шеремет Володимир Олександрович, Брехунов Олександр Васильович, Козенко Георгій Володимирович, Міщенко Петро Дмитрович, Савенчук Сергій Васильович, Мисько Степан Миколайович, Кекух Анатолій Володимирович, Нечитайло Віктор Михайлович, Шнипко Андрій Іванович
МПК: G01D 21/00, G01M 7/00
Мітки: хід, пристрій, технічний, автоматичного, обладнання, технологічного, стан, збору, діагностичної, інформації, процесу, обробки
Формула / Реферат:
Пристрій для автоматичного збору і обробки діагностичної інформації про технічний стан обладнання і хід технологічного процесу, що містить первинні перетворювачі параметрів технічного стану механізмів, блок первинної обробки сигналів параметрів технічного стану механізмів, схему визначення діагностичної ситуації, блок введення уставок, блок формування оперативної бази даних, генератор часових міток, схему перезапису інформації, блок індикації...
Система дроблення і одержання дрібнодисперсних матеріалів
Номер патенту: 42135
Опубліковано: 25.06.2009
Автори: Піддубняк Анатолій Григорович, Єрьомін Олександр Серафимович
МПК: B02C 21/00, B02C 23/00
Мітки: одержання, система, дрібнодисперсних, дроблення, матеріалів
Формула / Реферат:
1. Система дроблення і одержання дрібнодисперсних матеріалів, що містить живильний бункер з дозатором, пристрої для дроблення і розділення готового продукту на фракції, яка відрізняється тим, що вона оснащена подавачем рециркуляційної технологічної нейтральної газової суміші, накопичувальними бункерами різної висоти і самоочисним фільтром для очищення газової суміші, розташованим в герметичному корпусі і сполученим з подавачем через поглинач...
Спосіб контролю параметрів технологічного процесу
Номер патенту: 2880
Опубліковано: 16.08.2004
Автори: Коток Валерій Борисович, Лопатін Володимир Олексійович, Олійников Вадим Вікторович, Пітірімов Олександр Вікторович, Хохлов Олег Васильович, Саркісов Володимир Олександрович, Бантюков Євген Миколайович, Лінчевський Михайло Петрович, Волчков Іван Іванович, Старовойтов Володимир Гербертович
МПК: G06F 17/00, G05B 23/00
Мітки: параметрів, спосіб, контролю, технологічного, процесу
Формула / Реферат:
Попередній патент: Спосіб засипки відпрацьованих кар’єрів
Наступний патент: Спосіб визначення туберкулінової чутливості
Випадковий патент: Спосіб визначення неоднорідності суміші сипучих компонентів