Система керування груповою поведінкою рухомих об’єктів
Номер патенту: 60351
Опубліковано: 10.06.2011
Автори: Пермяков Олександр Юрійович, Машталір Вадим Віталійович, Кравченко Юрій Васильович, Савченко Віталій Анатолійович, Тищенко Максим Георгійович
Формула / Реферат
Система керування груповою поведінкою рухомих об'єктів, яка містить комплект приладів прийому та обробки радіонавігаційних сигналів від супутникових радіонавігаційних систем, блок обробки координат та блок керування, при цьому система керування груповою поведінкою рухомих об'єктів розміщується на рухомих об'єктах, яка відрізняється тим, що зазначена система додатково містить пристрій для обміну інформацією з іншими рухомими об'єктами та блок розпізнавання поточної ситуації, при цьому блок розпізнавання поточної ситуації містить модуль прогнозування ситуації, модуль вибору програми руху та модуль корекції поточного маршруту.
Текст
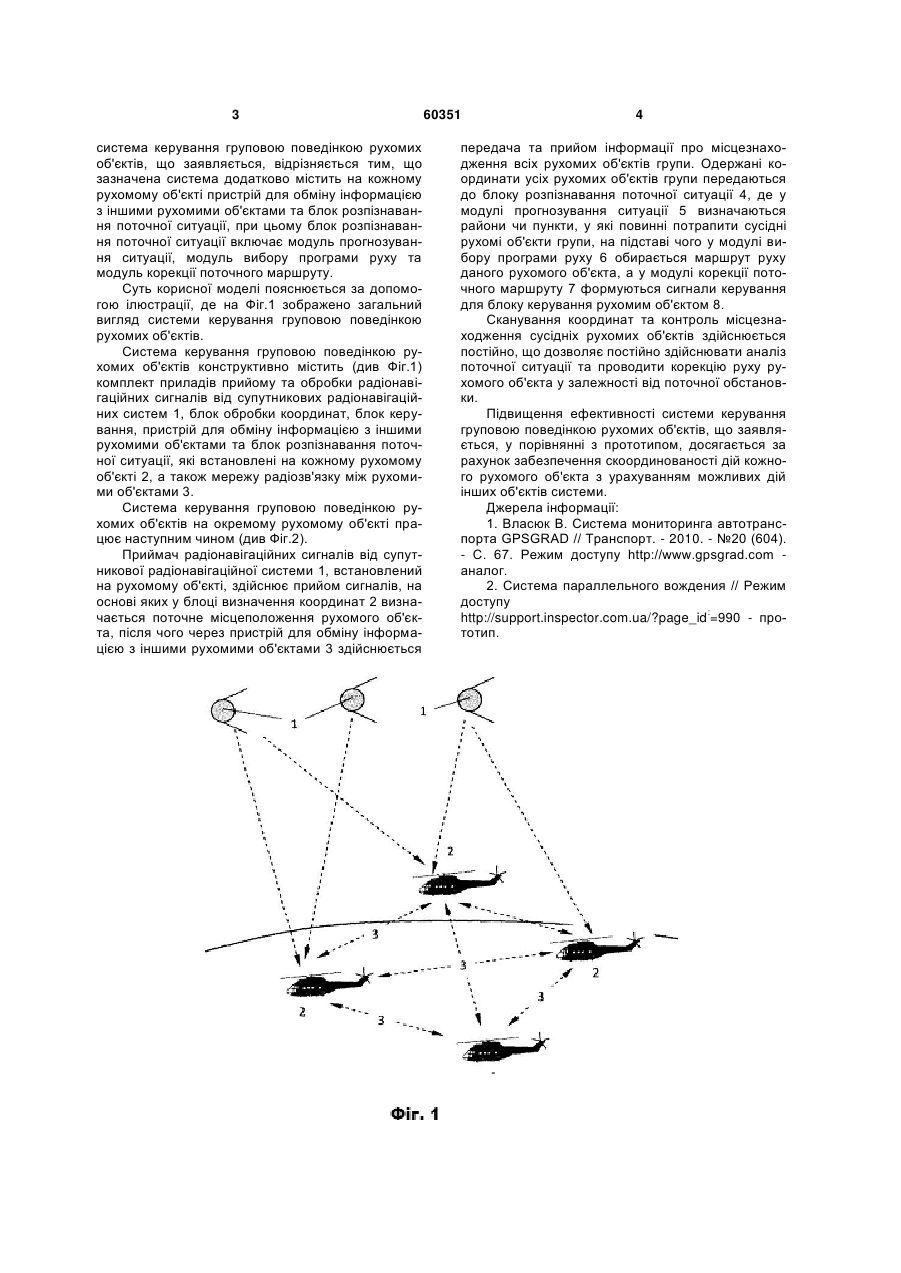
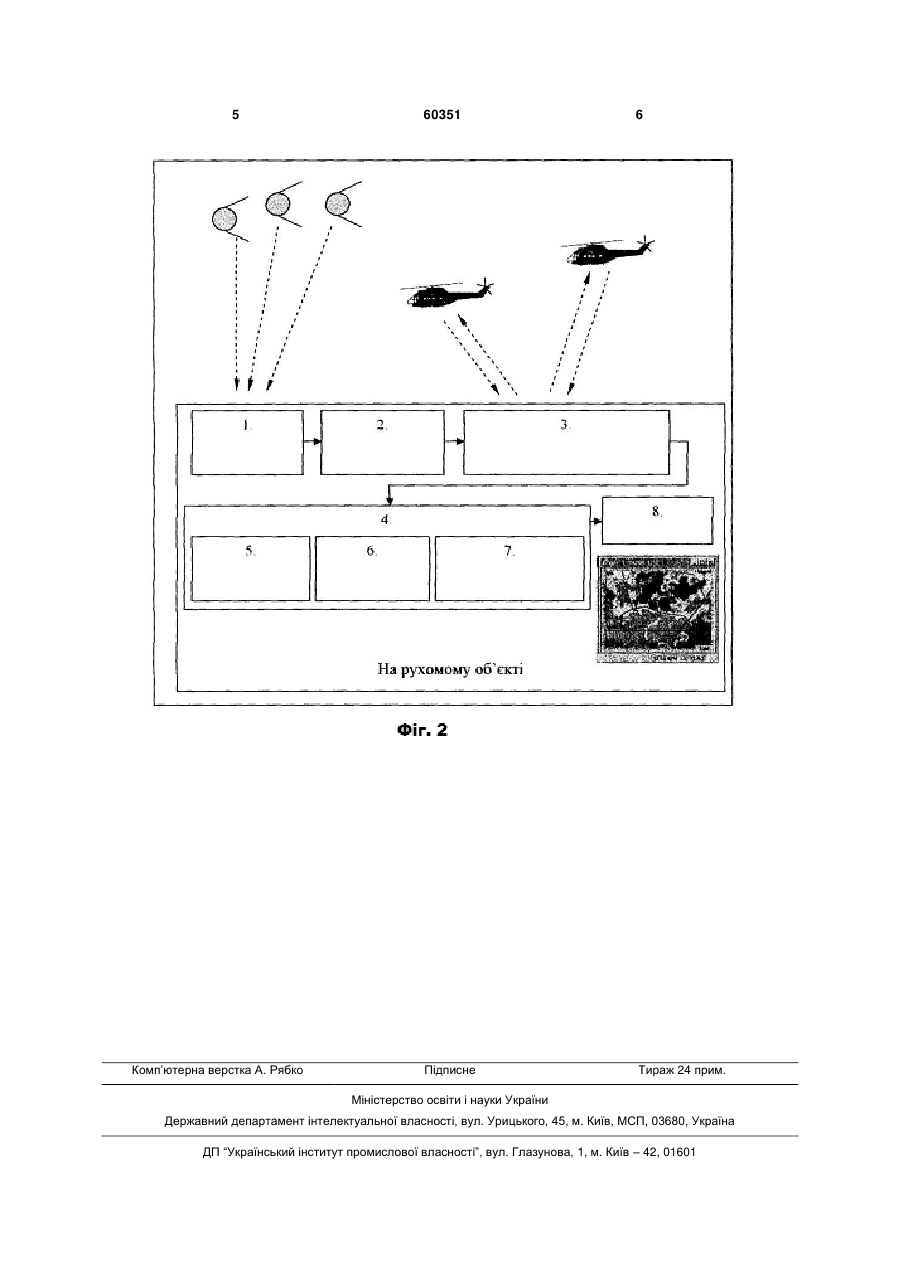
Система керування груповою поведінкою рухомих об'єктів, яка містить комплект приладів при 3 система керування груповою поведінкою рухомих об'єктів, що заявляється, відрізняється тим, що зазначена система додатково містить на кожному рухомому об'єкті пристрій для обміну інформацією з іншими рухомими об'єктами та блок розпізнавання поточної ситуації, при цьому блок розпізнавання поточної ситуації включає модуль прогнозування ситуації, модуль вибору програми руху та модуль корекції поточного маршруту. Суть корисної моделі пояснюється за допомогою ілюстрації, де на Фіг.1 зображено загальний вигляд системи керування груповою поведінкою рухомих об'єктів. Система керування груповою поведінкою рухомих об'єктів конструктивно містить (див Фіг.1) комплект приладів прийому та обробки радіонавігаційних сигналів від супутникових радіонавігаційних систем 1, блок обробки координат, блок керування, пристрій для обміну інформацією з іншими рухомими об'єктами та блок розпізнавання поточної ситуації, які встановлені на кожному рухомому об'єкті 2, а також мережу радіозв'язку між рухомими об'єктами 3. Система керування груповою поведінкою рухомих об'єктів на окремому рухомому об'єкті працює наступним чином (див Фіг.2). Приймач радіонавігаційних сигналів від супутникової радіонавігаційної системи 1, встановлений на рухомому об'єкті, здійснює прийом сигналів, на основі яких у блоці визначення координат 2 визначається поточне місцеположення рухомого об'єкта, після чого через пристрій для обміну інформацією з іншими рухомими об'єктами 3 здійснюється 60351 4 передача та прийом інформації про місцезнаходження всіх рухомих об'єктів групи. Одержані координати усіх рухомих об'єктів групи передаються до блоку розпізнавання поточної ситуації 4, де у модулі прогнозування ситуації 5 визначаються райони чи пункти, у які повинні потрапити сусідні рухомі об'єкти групи, на підставі чого у модулі вибору програми руху 6 обирається маршрут руху даного рухомого об'єкта, а у модулі корекції поточного маршруту 7 формуються сигнали керування для блоку керування рухомим об'єктом 8. Сканування координат та контроль місцезнаходження сусідніх рухомих об'єктів здійснюється постійно, що дозволяє постійно здійснювати аналіз поточної ситуації та проводити корекцію руху рухомого об'єкта у залежності від поточної обстановки. Підвищення ефективності системи керування груповою поведінкою рухомих об'єктів, що заявляється, у порівнянні з прототипом, досягається за рахунок забезпечення скоординованості дій кожного рухомого об'єкта з урахуванням можливих дій інших об'єктів системи. Джерела інформації: 1. Власюк В. Система мониторинга автотранспорта GPSGRAD // Транспорт. - 2010. - №20 (604). - С. 67. Режим доступу http://www.gpsgrad.com аналог. 2. Система параллельного вождения // Режим доступу : http://support.inspector.com.ua/?page_id =990 - прототип. 5 Комп’ютерна верстка А. Рябко 60351 6 Підписне Тираж 24 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for control of group behavior of movable objects
Автори англійськоюPermiakov Oleksandr Yuriiovych, Kravchenko Yurii Vasyliovych, Savchenko Vitalii Andriiovych, Tuschenko Maksum Georgiiovych, Mashtalir Vadym Vitaliiovych
Назва патенту російськоюСистема управления групповым поведением подвижных объектов
Автори російськоюПермяков Александр Юрьеович, Кравченко Юрий Васильевич, Савченко Виталий Анатолиевич, Тищенко Максим Георгиевич, Машталир Вадим Витальевич
МПК / Мітки
МПК: G01S 5/02
Мітки: система, об'єктів, груповою, рухомих, поведінкою, керування
Код посилання
<a href="https://ua.patents.su/3-60351-sistema-keruvannya-grupovoyu-povedinkoyu-rukhomikh-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Система керування груповою поведінкою рухомих об’єктів</a>
Система обліку рухомих об’єктів
Номер патенту: 42385
Опубліковано: 25.06.2009
Автори: Руденко Максим Володимирович, Сєнін Костянтин Олександрович, Нагорний Володимир Васильович
МПК: G07C 9/00
Мітки: об'єктів, система, обліку, рухомих
Формула / Реферат:
1. Система обліку рухомих об'єктів, що містить засіб фіксації рухомих об'єктів, з'єднаний з датчиком імпульсів та блоком живлення, а датчик імпульсів з'єднаний з центром обробки даних, яка відрізняється тим, що в ній як засіб фіксації рухомих об'єктів використовують щонайменше один пружний елемент, встановлений так, що він при натисканні з'єднується з датчиком імпульсів.2. Система обліку рухомих об'єктів за п. 1, яка відрізняється тим,...
Система відмовостійкого керування об`єктами
Номер патенту: 30708
Опубліковано: 11.03.2008
Автор: Кулік Анатолій Степанович
МПК: G06F 11/18
Мітки: відмовостійкого, система, керування, об'єктами
Формула / Реферат:
Система відмовостійкого керування об'єктами, яка має входи системи, виходи системи, об'єкт діагностування, аналізатор виду аварійної ситуації, формувач варіантів парирування, блок вибору процедури парирування, причому входи системи з'єднані з інформаційними входами об'єкта діагностування та з першою групою входів аналізатора виду аварійної ситуації, виходи об'єкта діагностування з'єднані з виходами системи та з другою групою входів...
Система для супроводження рухомих об’єктів
Номер патенту: 38860
Опубліковано: 26.01.2009
Автори: Бугрімов Дмитро Дмитрович, Ярмиш Олександр Назарович, Яковенко Олександр Васильович, Мусієнко Дмитро Іванович, Лоторєв Володимир Олександрович, Белогуров Володимир Андрійович
МПК: G01S 5/14
Мітки: рухомих, об'єктів, система, супроводження
Формула / Реферат:
1. Система для супроводження рухомих об'єктів, що містить рухомий об'єкт, пульт контролю, основну і додаткові базові станції та супутники NAVSTAR, при цьому до складу рухомого об'єкта входять GSM-модем, система активізації, GPS-приймач з антеною та блок живлення з комутуючими ключами, до складу пульта контролю входять GSM-модем, контролер пульта контролю та ПЕОМ з монітором і програмним забезпеченням, що вводиться в ПЕОМ, кількість супутників...
Система представлення інформації на рухомих об’єктах
Номер патенту: 30216
Опубліковано: 11.02.2008
Автори: Томенко Віталій Іванович, Мусієнко Максим Павлович
МПК: G06F 17/00
Мітки: представлення, інформації, система, рухомих, об'єктах
Формула / Реферат:
Система представлення інформації на рухомих об'єктах, що містить розміщені на кожному рухомому об'єкті навігаційний комплекс, що включає GPS-модуль, модуль радіотракту з приймачем-передавачем з антеною, бортовий комп'ютер, процесор, призначений для обробки сигналів від приймача-передавача і вироблення інформаційних сигналів для представлення передачі через вказаний приймач-передавач по радіоканалу до серверу, що забезпечує отримання сигналів...
Система керування роботою модуля нагріву
Номер патенту: 35458
Опубліковано: 25.09.2008
Автори: Шевчук Микола Федорович, Семенюк Андрій Олександрович
МПК: F24H 1/00
Мітки: модуля, система, нагріву, керування, роботою
Формула / Реферат:
1. Система керування роботою модуля нагріву, яка відрізняється тим, що містить електронний блок, який задає послідовність включення окремих нагрівальних елементів модуля та інтервал між їх включеннями у залежності від різниці заданої температури та поточної температури теплоносія та від швидкості підвищення температури теплоносія з можливістю переходу на форсований режим роботи модуля нагріву.2. Система за п. 1, яка відрізняється тим,...
Попередній патент: Спосіб одержання кристалічного складу лікарського препарату у формі таблеток
Наступний патент: Канал автоматичного супроводження літальних апаратів за напрямком з бспм та розширеними можливостями
Випадковий патент: Спосіб лікування хронічного катарального гінгівіту