Система для супроводження рухомих об’єктів
Номер патенту: 38860
Опубліковано: 26.01.2009
Автори: Бугрімов Дмитро Дмитрович, Ярмиш Олександр Назарович, Белогуров Володимир Андрійович, Яковенко Олександр Васильович, Мусієнко Дмитро Іванович, Лоторєв Володимир Олександрович
Формула / Реферат
1. Система для супроводження рухомих об'єктів, що містить рухомий об'єкт, пульт контролю, основну і додаткові базові станції та супутники NAVSTAR, при цьому до складу рухомого об'єкта входять GSM-модем, система активізації, GPS-приймач з антеною та блок живлення з комутуючими ключами, до складу пульта контролю входять GSM-модем, контролер пульта контролю та ПЕОМ з монітором і програмним забезпеченням, що вводиться в ПЕОМ, кількість супутників NAVSTAR вибирається не менше трьох, причому GSM-модем пульта контролю зв'язаний з ПЕОМ через контролер пульта контролю, ПЕОМ пульта контролю зв'язана з монітором, GSM-модем пульта контролю зв'язаний з рухомим об'єктом через мережу GSM-зв'язку через найближчі базові станції, що розташовані відносно пульта контролю та рухомого об'єкта, виходи блока живлення рухомого об'єкта зв'язані з GSM-модемом та з GPS-приймачем через систему активізації, GSM-модем рухомого об'єкта зв'язаний з сусідніми базовими станціями, з якими він обмінюється службовою інформацією, а GPS-приймач згаданого рухомого об'єкта зв'язаний через антену із супутниками NAVSTAR шляхом однобічного прийому інформації із зазначених супутників, яка відрізняється тим, що до складу рухомого об'єкта додатково введено центральний контролер з SIM-картою, флеш-пам'ять, мікрофон, підсилювач мікрофона, блок регулювання підсилення, USB-порт та контролер USB-порта, при цьому до складу системи активізації входять геркон, контролер системи активізації та ключ електронний, причому центральний контролер установлено в ланцюзі між виходом з блока живлення і входом у GSM-модем рухомого об'єкта, вихід мікрофона з'єднаний з першим входом підсилювача мікрофона, вихід блока регулювання підсилення з'єднаний з другим входом підсилювача мікрофона, вихід підсилювача мікрофона з'єднаний з другим входом GSM-модема рухомого об'єкта, зазначений GSM-модем з'єднаний з центральним контролером, зазначений центральний контролер з'єднаний з блоком регулювання підсилення, із системою активізації та зворотним зв'язком з флеш-пам'яттю, контролер USB-порта з'єднаний зворотним зв'язком з USB-портом, GPS-приймач згаданого рухомого об'єкта зв'язаний з флеш-пам'яттю, вихід/контакт геркона з'єднаний з контролером системи активізації, вихід зазначеного контролера системи активізації з'єднаний з ключем електронним і послідовно через зазначений ключ електронний з флеш-пам'яттю та з GPS-приймачем рухомого об'єкта, блок живлення додатково зв'язаний з контролером USB-порта, з підсилювачем мікрофона, з блоком регулювання підсилення, а в системі активізації - з контролером системи активізації.
2. Система за п. 1, яка відрізняється тим, що вихід GPS-приймача зв'язаний з входом GSM-модема рухомого об'єкта послідовно через флеш-пам'ять та центральний контролер.
3. Система за п. 1, яка відрізняється тим, що GSM-модем рухомого об'єкта разом з інформацією від GPS-приймача передає службову інформацію, отриману від сусідніх базових станцій.
4. Система за п. 1, яка відрізняється тим, що з виходу мікрофона отримують аудіоінформацію в реальному масштабі часу, що надходить з рухомого об'єкта, при цьому за допомогою послідовно розміщених підсилювача, блока регулювання підсилення, GSM-модема рухомого об'єкта та GSM-модема пульта контролю забезпечують якість аудіосигналу, який отримує оператор на пульті контролю.
Текст
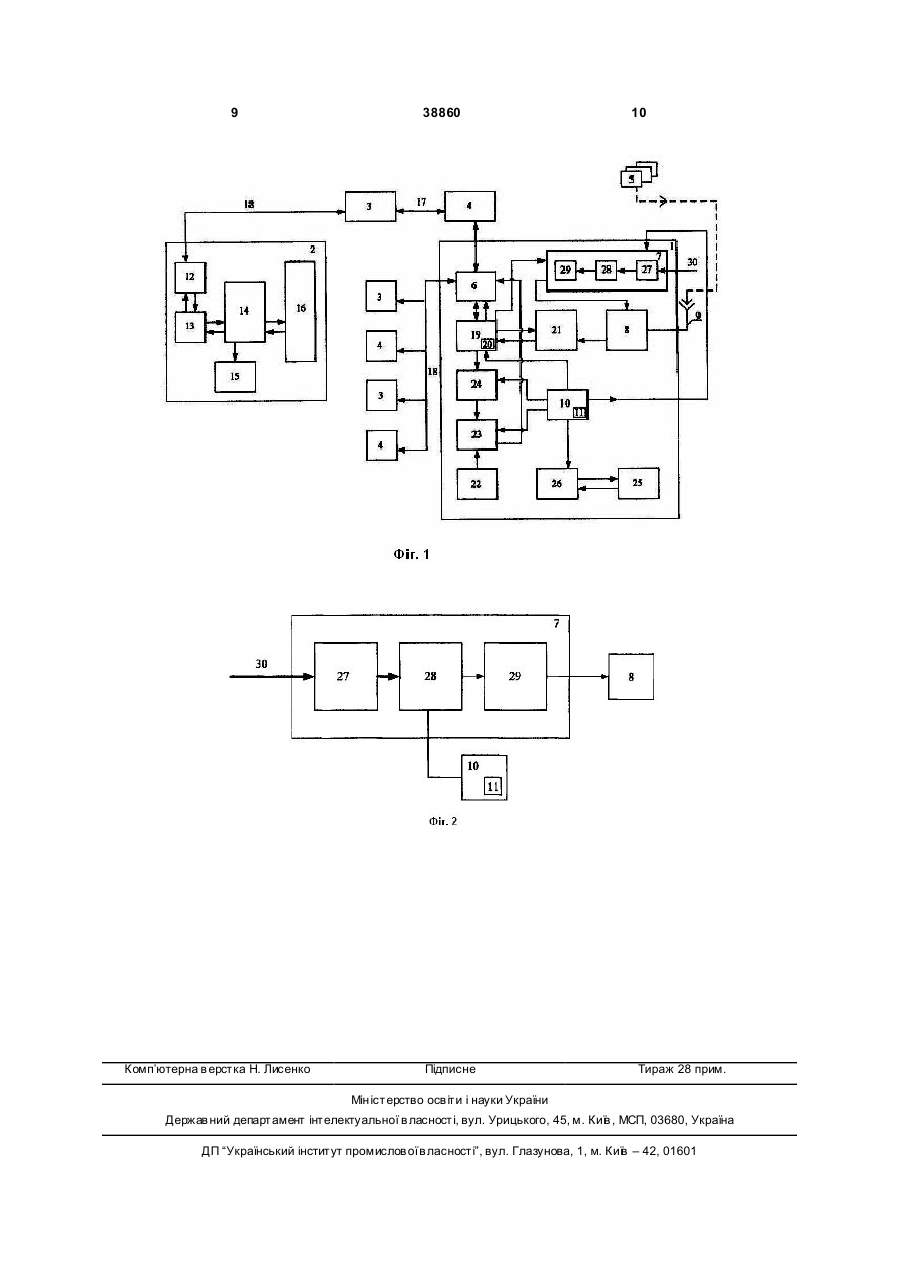
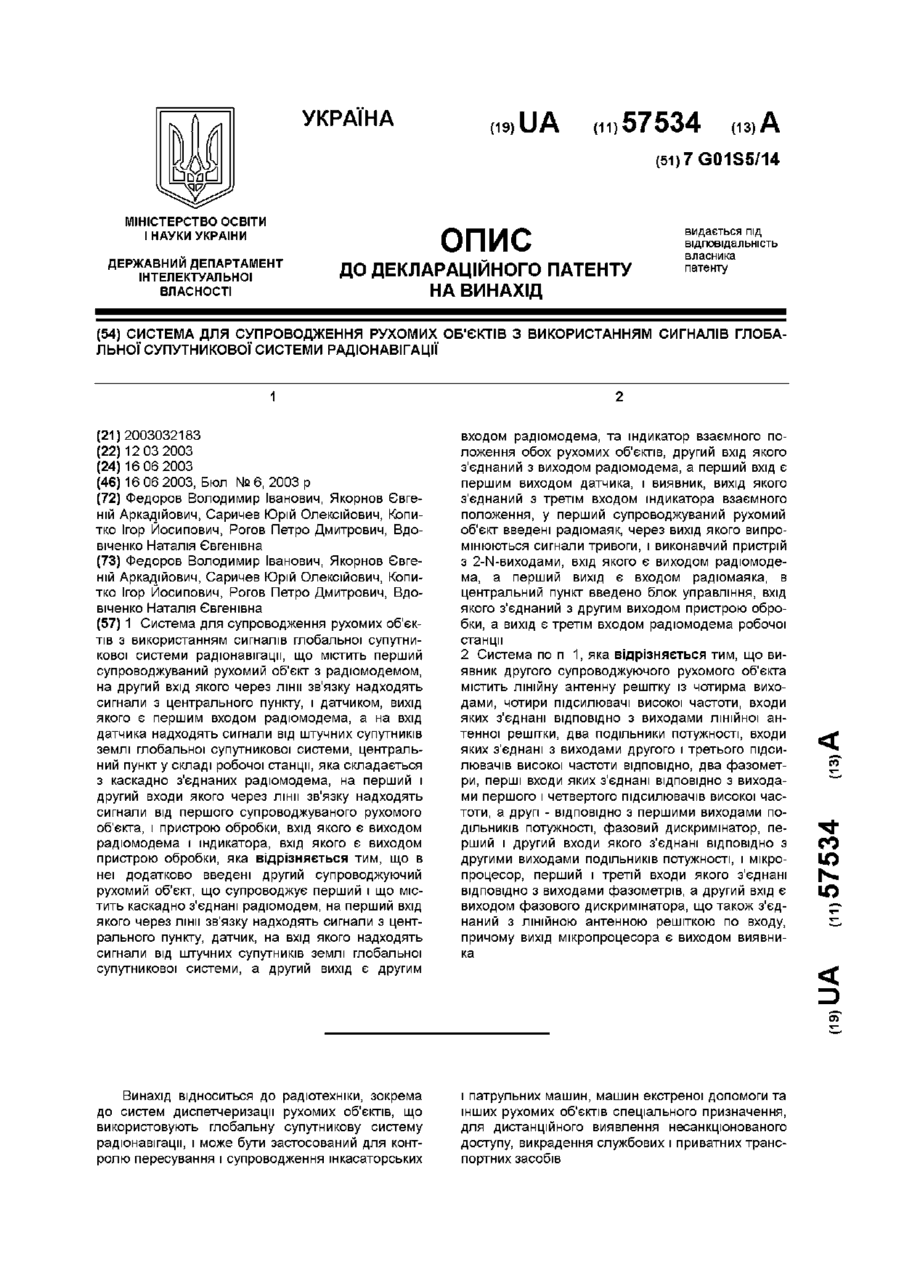
1. Система для супроводження рухомих об'єктів, що містить рухомий об'єкт, пульт контролю, основну і додаткові базові станції та супутники NAVSTAR, при цьому до складу рухомого об'єкта входять GSM-модем, система активізації, GPSприймач з антеною та блок живлення з комутуючими ключами, до складу пульта контролю входять GSM-модем, контролер пульта контролю та ПЕОМ з монітором і програмним забезпеченням, що вводиться в ПЕОМ, кількість супутників NAVSTAR вибирається не менше трьох, причому GSM-модем пульта контролю зв'язаний з ПЕОМ через контролер пульта контролю, ПЕОМ пульта контролю зв'язана з монітором, GSM-модем пульта контролю зв'язаний з рухомим об'єктом через мережу GSM-зв'язку через найближчі базові станції, що розташовані відносно пульта контролю та рухомого об'єкта, виходи блока живлення рухомого об'єкта зв'язані з GSM-модемом та з GPS-приймачем через систему активізації, GSM-модем рухомого об'єкта зв'язаний з сусідніми базовими станціями, з якими він обмінюється службовою інформацією, а GPS-приймач згаданого рухомого об'єкта зв'язаний через антену із суп утниками NAVSTAR шляхом однобічного прийому інформації із зазначених супутників, яка відрізняється тим, що до складу рухомого об'єкта додатково введено центральний контролер з SIM-картою, флеш-пам'ять, мікрофон, підсилювач мікрофона, блок регулювання підсилення, USB-порт та контролер USB-порта, при цьому до складу системи активізації входять геркон, конт 2 (19) 1 3 Корисна модель відноситься до галузі радіоелектроніки, зокрема, до систем диспетчеризації рухомих об'єктів, а саме: до систем для супроводження рухомих об'єктів. Відома система для супроводження рухомих об'єктів, яка містить N супроводжуваних об'єктів, кожний з яких має радіомодем, на другий вхід якого через лінії зв'язку надходять сигнали з центрального пункту, датчик (СЗРЗ приймач), вихід якого є першим входом радіомодему, а на вхід цього датчика надходять навігаційні сигнали, які потрапляють у ширококутову діаграму спрямованості антен, що закріплені на кожному рухомому об'єкті, центральний пункт у складі каскадно з'єднаних радіомодемів, на перший та другий входи якого через телекомунікаційні канали зв'язку надходять сигнали від радіомодемів, встановлених на N супроводжуваних рухомих об'єктах, пристрою обробки, вхід якого є виходом радіомодему, а ви хід його є входом індикатора оператора центрального пункту, який відповідно до ситуації через пульт керування змінює режими роботи блока керування, вихід якого є третім входом радіомодему [1]. Основним недоліком цієї відомої системи є невисока точність визначення місцезнаходження багатьох транспортних засобів, що супроводжуються за рахунок використання опорного GPSприймача, який працює у режимі контрольнокоригуючої станції. Найбільш близьким технічним рішенням, як по суті, так і за результатом, що досягається, яке обрано за найближчий аналог (прототип), є система для супроводження рухомих об'єктів, яка містить рухомий об'єкт, пульт контролю, основну і додаткові базові станції та суп утники NAVSTAR, при цьому до складу рухомого об'єкту входять GSM-модем, система активізації, GPS-приймач з антеною та блок живлення з комутуючими ключами, до складу пульта контролю входять GSMмодем, контролер пульта контролю та ПЕОМ з монітором і програмним забезпеченням, що вводиться в ПЕОМ, кількість супутників NAVSTAR вибирається не менше трьох, причому GSMмодем пульта контролю зв'язаний з ПЕОМ через контролер пульта контролю, ПЕОМ пульта контролю зв'язана з монітором, GSM-модем пульта контролю зв'язаний з рухомим об'єктом через мережу GSM-зв'язку через найближчі базові станції, що розташовані відносно пульта контролю та рухомого об'єкту, ви ходи блока живлення рухомого об'єкту зв'язані з GSM-модемом та з GPSприймачем через систему активізації, GSMмодем рухомого об'єкту зв'язаний з сусідніми базовими станціями, з якими він обмінюється службовою інформацією, а GPS-приймач згаданого рухомого об'єкту зв'язаний через антену зі суп утниками NAVSTAR шляхом однобічного прийому інформації із зазначених супутників [2]. До недоліків відомої системи для супроводження рухомих об'єктів, яка обрана за найближчий аналог (прототип), відноситься те, що система не виконує покладене завдання, якщо кількість видимих супутників NAVSTAR менше 38860 4 трьох, сигнал прийнятий від супутників низького рівня (наприклад, густий ліс, під естакадою, у тунелі тощо). В основу корисної моделі покладено завдання шляхом уведення додаткового каналу обробки інформації, забезпечити визначення місцезнаходження рухомих об'єктів за допомогою вихідних даних протоколів обміну базових станцій GSMзв'язку з GSM-модемом рухомого об'єкту з використанням відомих географічних координат базових станцій (координати мають бути введені в пам'ять ПЕОМ пульту контролю. ПЕОМ під управлінням відповідного програмного забезпечення обчислює місцезнаходження рухомого об'єкта, враховуючи номер базової станції, її географічні координати і відстань між рухомим об'єктом та базовою станцією. Також вводиться аудіоканал з дистанційно керованим рівнем підсилення для дистанційного контролю "аудіооточення". Суть корисної моделі в системі для супроводження рухомих об'єктів, що містить рухомий об'єкт, пульт контролю, основну і додаткові базові станції та супутники NAVSTAR, при цьому до складу рухомого об'єкту входять GSM-модем, система активізації, GPS-приймач з антеною та блок живлення з комутуючими ключами, до складу п ульта контролю входять GSM-модем, контролер пульта контролю та ПЕОМ з монітором і програмним забезпеченням, що вводиться в ПЕОМ, кількість супутників NAVSTAR вибирається не менше трьох, причому GSM-модем пульта контролю зв'язаний з ПЕОМ через контролер пульту контролю, ПЕОМ пульта контролю зв'язана з монітором, GSM-модем пульта контролю зв'язаний з рухомим об'єктом через мережу GSMзв'язку через найближчі базові станції, що розташовані відносно пульта контролю та рухомого об'єкту, виходи блока живлення рухомого об'єкта зв'язані з GSM-модемом та з GPS-приймачем через систему активізації, GSM-модем рухомого об'єкта зв'язаний із сусідніми базовими станціями, з якими він обмінюється службовою інформацією, а GPS-приймач згаданого рухомого об'єкту зв'язаний через антену із супутниками NAVSTAR шляхом однобічного прийому інформації із зазначених суп утників, полягає в тому, що до складу р ухомого об'єкту додатково введено центральний контролер з SIM-картою, флеш-пам'ять, мікрофон, підсилювач мікрофону, блок регулювання підсилення, USB-порт та контролер USBпорта. Суть корисної моделі полягає і в тому, що до складу системи активізації входять геркон, контролер системи активізації та ключ електронний. Суть корисної моделі полягає також і в тому, що центральний контролер установлено в ланцюзі між виходом з блоку живлення і входом у GSM-модем рухомого об'єкта, вихід мікрофону з'єднаний з першим входом підсилювача мікрофону, вихід блоку регулювання підсилення з'єднаний з другим входом підсилювача мікрофону, вихід підсилювача мікрофону з'єднаний з другим входом GSM-модему рухомого об'єкта, зазначений GSM-модем з'єднаний з центральним конт 5 ролером, зазначений центральний контролер з'єднаний з блоком регулювання підсилення, з системою активізації та зворотним зв'язком з флеш-пам'яттю, контролер USB-порта з'єднаний зворотним зв'язком з USB-портом, GPS-приймач згаданого рухомого об'єкту зв'язаний з флешпам'яттю, вихід/контакт геркону з'єднаний з контролером системи активізації, вихід зазначеного контролеру системи активізації з'єднаний з ключем електронним і послідовно через зазначений ключ електронний з флеш-пам'яттю та з GPSприймачем рухомого об'єкту, блок живлення додатково зв'язаний з контролером USB-порта, з підсилювачем мікрофону, з блоком регулювання підсилення, а в системі активізації - з контролером системи активізації. Новим у корисній моделі є й те, що ви хід GPS-приймача зв'язаний з входом GSM-модему рухомого об'єкту послідовно через флеш-пам'ять та центральний контролер, GSM-модем рухомого об'єкту разом з інформацією від GPS-приймача передає службову інформацію, отриману від сусідніх базових станцій, з виходу мікрофону отримують аудіоінформацію в реальному масштабі часу, що надходить з рухомого об'єкту, а за допомогою послідовно розміщених підсилювача, блоку регулювання підсилення, GSM-модему рухомого об'єкту та GSMмодему пульта контролю забезпечують якість аудіосигналу, який отримує оператор на пульті контролю. Порівняльний аналіз технічного рішення з прототипом дозволяє зробити висновок, що система для супроводження рухомих об'єктів, яка заявляється, відрізняється тим, що до складу рухомого об'єкту додатково введено центральний контролер із SIM-картою, флеш-пам'ять, мікрофон, підсилювач мікрофону, блок регулювання підсилення, USB-порт та контролер USB-порта. Суть корисної моделі полягає і в тому, що при цьому до складу системи активізації входять геркон, контролер системи активізації та ключ електронний, причому центральний контролер установлено в ланцюзі між виходом з блоку живлення і входом у GSM-модем рухомого об'єкту, ви хід мікрофона з'єднаний з першим входом підсилювача мікрофона, вихід блоку регулювання підсилення з'єднаний з другим входом підсилювача мікрофона, вихід підсилювача мікрофона з'єднаний з другим входом GSM-модему рухомого об'єкту, зазначений GSM-модем з'єднаний з центральним контролером, зазначений центральний контролер з'єднаний з блоком регулювання підсилення, з системою активізації та зворотним зв'язком із флеш-пам'яттю, контролер USBпорта з'єднаний зворотним зв'язком з USBпортом, GPS-приймач згаданого рухомого об'єкту зв'язаний з флеш-пам'яттю, вихід/контакт геркону з'єднаний з контролером системи активізації, вихід зазначеного контролеру системи активізації з'єднаний з ключем електронним і послідовно через зазначений ключ електронний з флешпам'яттю та з GPS-приймачем рухомого об'єкту, блок живлення додатково зв'язаний з контролером USB-порта, з підсилювачем мікрофону, з блоком регулювання підсилення, а в системі ак 38860 6 тивізації - з контролером системи активізації, вихід GPS-приймача зв'язаний з входом GSMмодему рухомого об'єкту послідовно через флеш-пам'ять та центральний контролер, GSMмодем рухомого об'єкту разом з інформацією від GPS-приймача передає службову ін формацію, отриману від сусідніх базових станцій, з виходу мікрофону отримують аудіоінформацію в реальному масштабі часу, що надходить з рухомого об'єкту, а за допомогою послідовно розміщених підсилювача, блоку регулювання підсилення, GSM-модему рухомого об'єкту та GSM-модему пульта контролю забезпечують якість аудіосигналу, який отримує оператор на пульті контролю. Таким чином, система для супроводження рухомих об'єктів, яка заявляється, відповідає критерію корисної моделі «новизна». Суть корисної моделі пояснюється за допомогою ілюстрацій, де на Фіг.1 показана схема розміщення конструктивних елементів системи для супроводження рухомих об'єктів, яка заявляється, на Фіг.2 показана схема системи активації, яка знаходиться на рухомому об'єкті. Система для супроводження рухомих об'єктів, яка заявляється, містить (див. схему на Фіг.1) рухомий об'єкт 1, пульт контролю 2, основну 3 і сусідні базові станції 4 та суп утники NAVSTAR 5. Конструктивно до складу рухомого об'єкта 1 входять GSM-модем 6, система активізації 7, GPSприймач 8 з антеною 9 та блок живлення 10 з комутуючими ключами 11 (див. Фіг.1, 2). Конструктивно до складу пульта контролю 2 входять GSM-модем 12, контролер 13 пульта контролю 2 та ПЕОМ 14 з монітором 15 і програмним забезпеченням 16, що вводиться в ПЕОМ 14. Кількість суп утників NAVSTAR 5 вибирається не менше трьох. Конструктивно і технологічно GSM-модем 12 пульта контролю 2 зв'язаний з ПЕОМ 14 через контролер 13 пульту контролю 2. ПЕОМ 14 пульта контролю 2 зв'язана з монітором 15. GSMмодем 12 пульта контролю 2 зв'язаний з рухомим об'єктом 1 через мережу GSM-зв'язку 17 через найближчі базові станції 3 і 4, що розташовані відносно пульта контролю 2 та рухомого об'єкту 1 (див. Фіг.1). Конструктивно і технологічно виходи блока живлення 10 рухомого об'єкту зв'язані з GSM-модемом б та з GPS-приймачем 8 через систему активізації 7 (див. Фіг.1, 2). GSM-модем 6 рухомого об'єкту 1 зв'язаний із сусідніми базовими станціями 3 і 4, з якими він обмінюється службовою інформацією, а GPS-приймач 8 згаданого рухомого об'єкту 1 зв'язаний через антену 9 зі суп утниками NAVSTAR 5 шля хом однобічного прийому інформації із зазначених супутників 5. Конструктивно до складу рухомого об'єкту 1 додатково введено центральний контролер 19 з SIM-картою 20, флеш-пам'ять 21, мікрофон 22, підсилювач 23 мікрофону, блок 24 регулювання підсилення, USB-порт 25 та контролер 26 USBпорта (див. Фіг.1). Конструктивно до складу системи активізації 7 входять геркон 27, контролер 28 системи активізації та ключ електронний 29 (див. Фіг.2). Констр уктивно центральний контролер 19 установлено в ланцюзі між виходом з бло 7 ку живлення 10 і входом у GSM-модем 6 рухомого об'єкта. Вихід мікрофону 22 з'єднаний з першим входом підсилювача 23 мікрофону. Вихід блоку 24 регулювання підсилення з'єднаний з другим входом підсилювача 23 мікрофону. Вихід підсилювача 23 мікрофону з'єднаний з другим входом GSM-модему 6 рухомого об'єкта. Зазначений GSM-модем 6 рухомого об'єкта з'єднаний з центральним контролером 19. Зазначений центральний контролер 19 технологічно з'єднаний з блоком 24 регулювання підсилення, з системою активізації 7 та зворотним зв'язком з флеш-пам'яттю 21 (див. Фіг.1). Контролер USBпорта 26 з'єднаний зворотним зв'язком з USBпортом 25. GPS-приймач 8 згаданого рухомого об'єкту 1 зв'язаний із флеш-пам'яттю 21. Вихід/контакт геркону 27 з'єднаний з контролером 28 системи активізації 7. Вихід зазначеного контролеру 28 системи активізації 7 з'єднаний з ключем електронним 29 і послідовно через зазначений ключ електронний 29 з флеш-пам'яттю 21 та з GPS-приймачем 8 рухомого об'єкту 1 (див. Фіг.1, 2). Блок живлення 10 (з комутуючими ключами 11) додатково зв'язаний з контролером 26 USB-порта, з підсилювачем 23 мікрофону, з блоком 24 регулювання підсилення, а в системі активізації 7 - з контролером 28 системи активізації. Технологічно вихід GPS-приймача 8 зв'язаний з входом GSM-модему б рухомого об'єкта 1 послідовно через флеш-пам'ять 21 та центральний контролер 19 (див. Фіг.1). GSM-модем б рухомого об'єкта 1 разом з інформацією від GPS-приймача 8 передає службову інформацію, отриману від сусідніх базових станцій 3 і 4. З ви ходу мікрофону 22 отримують аудіоінформацію в реальному масштабі часу, що надходить з рухомого об'єкту 1, при цьому за допомогою послідовно розміщених підсилювача 23 мікрофону, блоку 24 регулювання підсилення, GSM-модему 6 рухомого об'єкта 1 та GSM-модему 12 пульта контролю 2 забезпечують якість аудіосигналу, який отримує оператор на пульті контролю 2. Система для супроводження рухомих об'єктів працює таким чином. Щоб привести систему для супроводження рухомих об'єктів до стан у супроводження зазначених рухомих об'єктів 1 в активному режимі, потрібно на рухомому (рухомих) об'єкті (об'єктах) 1 піднести магніт (як зовнішню фізичну активацію (позиція 30 - див. Фіг.2) до геркону 27 системи активації 7. Геркон (герметичний магнітокерований контакт) 27 реагує на зовнішнє магнітне поле постійного магніту і під його дією замикає свій контакт (зовнішня активація - позиція 30). Спрацьовує зазначений геркон 27. При спрацьовуванні геркону 27 керуючий сигнал з виходу/контакту геркона 27 подається на 38860 8 контролер 28 системи активізації 7. Також на зазначений контролер 28 системи активізації 7 подається живлення з блоку живлення 10. Водночас живлення із зазначеного блоку живлення 10 подається на центральний контролер 10 рухомого об'єкту 1 (а з контролера 10 - на GSM-модем б рухомого об'єкту 1), на підсилювач 23, на блок 24 регулювання підсилення мікрофону 22, на контролер 26 USB-порта 25, на GPS-приймач 8 рухомого об'єкту 1 (через зазначену систему активації 7). При цьому контролер 28 системи активації 7 знаходиться постійно під напругою від блока живлення 10 (див. схему на Фіг.1). GPS-приймач 8 рухомого об'єкту 1 приймає за допомогою антени 9 сигнали від супутників NAVSTAR 5 шляхом однобічного прийому інформації із зазначених супутників 5. Зазначене здійснюється за допомогою вбудованого програмноапаратного блока (що знаходиться у GPSприймачі 8). За допомогою зазначеного програмно-апаратного блока здійснюється обчислювання координати місцерозташування рухомого об'єкту 1. Визначені координати рухомого об'єкту 1 передаються до флеш-пам'яті 21. GSM-модем 6 рухомого об'єкту 1 знаходиться на зв'язку з базовими станціями 3 і 4. За командами центрального контролера 19 службову інформацію, яка отримана від базових станцій 3 і 4, GSM-модем б рухомого об'єкту 1 (через центральний контролер 19) передає до флеш-пам'яті 21. У флеш-пам'яті 21 записуються інформаційні пакети (блоки), що містять у собі оброблену інформацію від GPSприймача 8 та інформацію від базових станцій 3 і 4. Підвищення ефективності застосування системи для супроводження рухомих об'єктів, яка заявляється, у порівнянні з прототипом, досягається шляхом уведення додаткового каналу обробки інформації для визначення місцезнаходження рухомого об'єкту. Як ви хідні дані використовуються протоколи обміну базових GSM-станцій з GSM-модемом рухомого об'єкту, а також географічні координати згаданих станцій. Крім того уведено аудіо-канал із дистанційно керованим рівнем підсилення для дистанційного контролю "аудіооточення". Запропонована система для супроводження рухомих об'єктів дозволяє постійно контролювати переміщення їх та спілкування з ними, забезпечує надійність, безпеку перевезень важливих вантажів та осіб. ДЖЕРЕЛА ІНФОРМАЦІЇ: 1. Патент 3 ЕР №0512789, опубл. 11.11.1992, МПК G01S5/14 - аналог. 2. Патент України №75709 від 15.05.2006. Бюл. №5, 2006, МПК (2006) G01S5/14 - прототип. 9 Комп’ютерна в ерстка Н. Лисенко 38860 Підписне 10 Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for tracking movable objects
Автори англійськоюYarmysh Oleksandr Nazarovych, Buhrimov Dmytro Dmytrovych, Lotoriev Volodymyr Oleksandrovych, Yakovenko Oleksandr Vasyliovych, Musiienko Dmytro Ivanovych, Belohurov Volodymyr Andriiovych
Назва патенту російськоюСистема для сопровождения подвижных объектов
Автори російськоюЯрмиш Александр Назарович, Бугримов Дмитрий Дмитриевич, Лоторев Владимир Александрович, Яковенко Александр Васильевич, Мусиенко Дмитрий Иванович, Белогуров Владимир Андреевич
МПК / Мітки
МПК: G01S 5/14
Мітки: рухомих, об'єктів, супроводження, система
Код посилання
<a href="https://ua.patents.su/5-38860-sistema-dlya-suprovodzhennya-rukhomikh-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Система для супроводження рухомих об’єктів</a>
Система для супроводження рухомих об’єктів з використанням сигналів глобальної супутникової системи радіонавігації
Номер патенту: 57534
Опубліковано: 16.06.2003
Автори: Вдовіченко Наталія Євгенівна, Якорнов Євгеній Аркадійович, Саричев Юрій Олексійович, Рогов Петро Дмитрович, Федоров Володимир Іванович, Копитко Ігор Йосипович
МПК: G01S 5/14
Мітки: супутникової, система, супроводження, системі, сигналів, глобальної, використанням, об'єктів, рухомих, радіонавігації
Формула / Реферат:
1. Система для супроводження рухомих об'єктів з використанням сигналів глобальної супутникової системи радіонавігації, що містить перший супроводжуваний рухомий об'єкт з радіомодемом, на другий вхід якого через лінії зв'язку надходять сигнали з центрального пункту, і датчиком, вихід якого є першим входом радіомодема, а на вхід датчика надходять сигнали від штучних супутників землі глобальної супутникової системи, центральний пункт у складі...
Система для супроводження рухомих об’єктів з використанням сигналів глобальної супутникової системи радіонавігації
Номер патенту: 63867
Опубліковано: 15.01.2004
Автори: Копитко Ігор Йосипович, Рогов Петро Дмитрович, Ільченко Михайло Юхимович, Левшенко Олександр Семенович, Якорнов Євгеній Аркадійович
МПК: G01S 5/14
Мітки: система, радіонавігації, використанням, супутникової, супроводження, системі, об'єктів, сигналів, рухомих, глобальної
Формула / Реферат:
1. Система для супроводження рухомих об'єктів з використанням глобальної супутникової системи радіонавігації, що містить супроводжуваний рухомий об'єкт з GPS-датчиком, що приймає й обробляє сигнали штучних супутників Землі глобальної супутникової системи радіонавігації, які попадають у ширококутову діаграму направленості його антени, радіомодемом, вхід якого зв'язаний з виходом GPS-датчика, лінії зв'язку, на які надходять сигнали з виходу...
Система для супроводження рухомих об’єктів з використанням сигналів глобальної супутникової системи радіонавігації
Номер патенту: 8150
Опубліковано: 15.07.2005
Автори: Якорнов Євгеній Аркадійович, Жукова Маргарита Василівна, Авдєєнко Гліб Леонідович, Копитко Ігор Йосипович, Саричев Юрій Олексійович
МПК: G01S 5/14
Мітки: об'єктів, сигналів, система, системі, глобальної, супроводження, рухомих, використанням, радіонавігації, супутникової
Формула / Реферат:
Система для супроводження рухомих об'єктів з використанням глобальної супутникової системи радіонавігації, що містить центральний пост у складі робочої станції з двома приймально-передавальними антенами, що складається з каскадно з'єднаних приймача з датчиком команд і пристрою обробки, перший вихід якого з'єднаний з першим входом приймача з датчиком команд, блока управління, вхід якого з'єднаний з першим виходом робочої станції, який є другим...
Автоматизована радіоканальна система централізованого спостереження, контролю та охорони стаціонарних та рухомих об’єктів
Номер патенту: 70041
Опубліковано: 15.09.2004
Автори: Тарасов Юрій Васильович, Молостов Олександр Геннадійович, Медведєв Сергій Леонідович
МПК: G08B 25/10, B60R 25/10, G08B 25/00, G08B 25/08
Мітки: централізованого, система, спостереження, автоматизована, охорони, радіоканальна, рухомих, об'єктів, контролю, стаціонарних
Формула / Реферат:
1. Автоматизована радіоканальна система централізованого спостереження, контролю й охорони стаціонарних і рухомих об'єктів, що має у своєму складі пульт централізованого спостереження, до складу якого входить перший контролер доступу до стандартної стільникової мережі рухомого зв'язку, вхід якого з'єднаний з виходом першої приймально-передавальної пультової антени, друга приймально-передавальна пультова антена, К постів ретрансляції, кожний з...
Система представлення інформації на рухомих об`єктах
Номер патенту: 27895
Опубліковано: 26.11.2007
Автор: Савчук Олег Леонідович
МПК: G06F 17/00
Мітки: рухомих, інформації, система, представлення, об'єктах
Формула / Реферат:
1. Система представлення інформації на рухомих об'єктах, що містить розміщені на кожному рухомому об'єкті навігаційний комплекс, що включає GPS і GSM модулі, а також SIM-карту для GSM модуля, приймач-передавач з антеною, бортовий комп'ютер, процесор, призначений для обробки сигналів від приймача-передавача і вироблення інформаційних сигналів для представлення передачі через вказаний приймач-передавач по радіоканалу до сервера, що забезпечує...
Попередній патент: Прихованоносима радіостанція
Наступний патент: Спосіб прогнозування перинатальних втрат при затримці розвитку плода
Випадковий патент: Голографічний елемент "і-мет"