Спосіб керування ультразвуковим сигналізатором рівня
Формула / Реферат
Спосіб керування ультразвуковим сигналізатором рівня рідких і сипучих середовищ шляхом надання ультразвуковому перетворювачу переривчастих механічних коливань під дією радіоімпульсів і реєстрації сигналів, який відрізняється тим, що час дії радіоімпульсу встановлюють не меншим часу очищення контактної поверхні ультразвукового перетворювача від конденсату, а час реєстрації встановлюють не меншим ніж час дії радіоімпульсу, паузи між радіоімпульсами вибирають не більшими часу проходження вимірюваним рівнем зони похибки спрацювання сигналізатора, при цьому амплітуду механічних коливань контактної поверхні ультразвукового перетворювача встановлюють не меншою порогу початку розпилення конденсату.
Текст
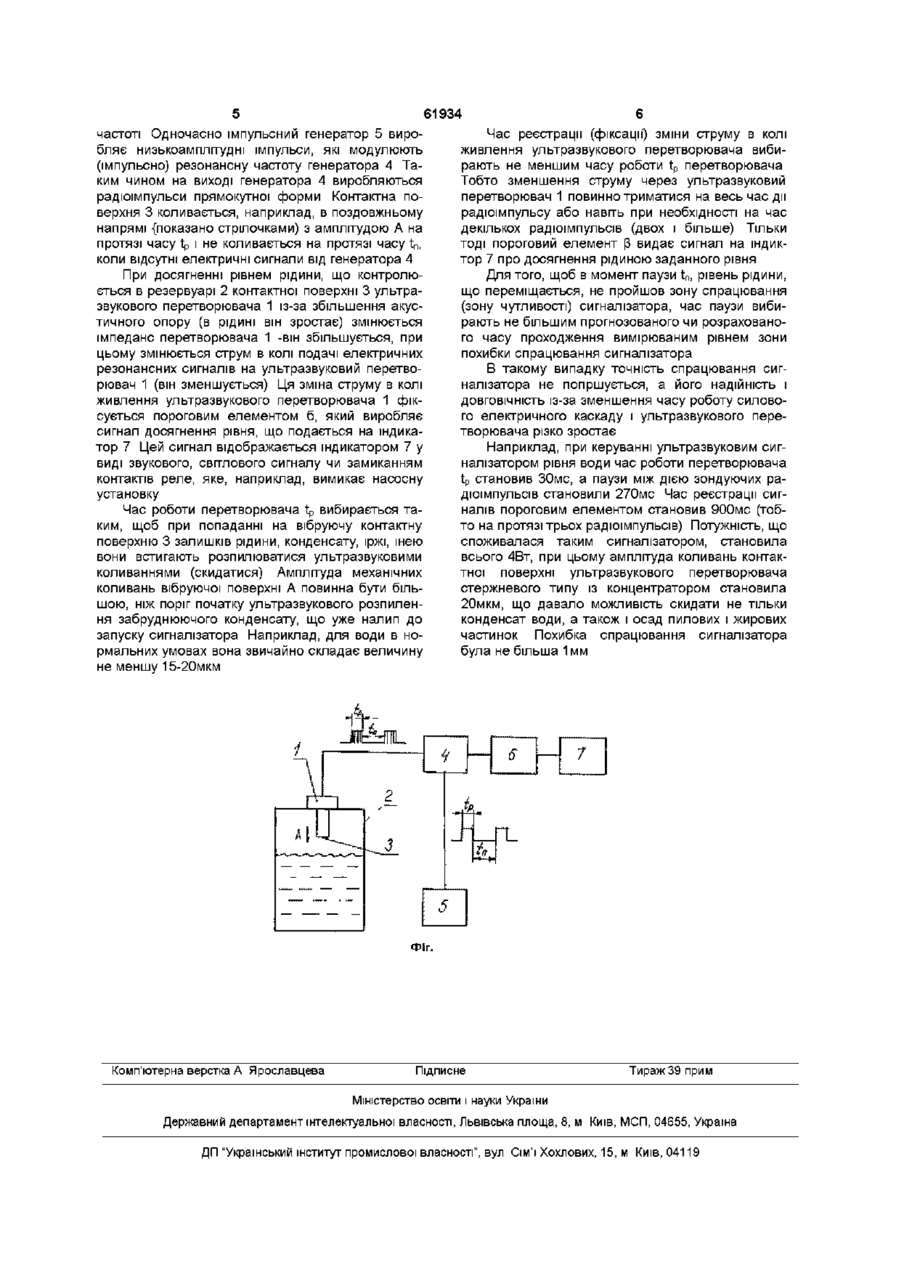
Спосіб керування ультразвуковим сигналізатором рівня рідких і сипучих середовищ шляхом надання ультразвуковому перетворювачу переривчастих механічних коливань під дією радіоімпу Винахід відноситься до техніки контролю рівня рідких і сипучих середовищ акустичними методами і може бути використаний для вимірювання, сигналізації і регулювання рівня різних рідин і сипучих середовищ, в тому числі агресивних і вибухонебезпечних (нафтопродуктів, ХІМІЧНИХ реагентів, рідин з підвищеною радіоактивністю, молока, муки) Відомо, ЩО при транспортуванні та зберіганні рідких та сипучих матеріалів в резервуарах потрібно визначати ступінь їх заповнення, тобто рівень, особливо це необхідно при роботі з агресивними, вибухонебезпечними, токсичними та радіоактивними матеріалами Отримувати інформацію про рівень можливо у вигляді сигналізації певних граничних величин, зв'язаних з фізичними та ХІМІЧНИМИ властивостями рідкої чи сипучої речовини Особливо часто в останній час використовують ультразвукові перетворювачі в якості датчиків рівня В них нема рухомих частин і вони прості в установці, забезпечують більш високу надійність при підвищеній чутливості Вони можуть використовуватися в чистих, в'язких або тих рідинах, що містять тверді частинки, а також в деяких суспензіях і аерованих рідинах Вони використовуються для контролю середовищ практично з будь-якими фізико-хімічними властивостями, забезпечують стійку роботу в сильно забруднених, закипаючих і неоднорідних рідинах, суспензіях і емульсіях при простоті конструкції і принципу дії Відомий спосіб керування ультразвуковим сиг льсів і реєстрації сигналів, який відрізняється тим, що час дії радіоімпульсу встановлюють не меншим часу очищення контактної поверхні ультразвукового перетворювача від конденсату, а час реєстрації встановлюють не меншим ніж час дії радіоімпульсу, паузи між радіоімпульсами вибирають не більшими часу проходження вимірюваним рівнем зони похибки спрацювання сигналізатора, при цьому амплітуду механічних коливань контактної поверхні ультразвукового перетворювача встановлюють не меншою порогу початку розпилення конденсату налізатором, що ґрунтується на реєстрації генерації підсилювача з позитивним зворотнім зв'язком через акустичний тракт датчика, що включає в себе випромінювач і приймач ультразвуку при наявності рідини між ними ("Ультразвук", маленькая энциклопедия, ред И П Галямина, с 320, рис 2, «Советская энциклопедия», М , 1979) Такий сигналізатор має низьку точність із-за достатньо великого зазору між випромінювачем і приймачем ультразвуку Крім того при конденсації парів рідини або забризкуванні рідиною датчика (наприклад, при наливанні чи перемішуванні) можливе помилкове спрацьовування і передача помилкової інформації, тобто такий сигналізатор має низьку надійність в реальних умовах експлуатації Відомий також спосіб керування ультразвуковим сингалізатором рівня, що ґрунтується на генерації ультразвуковим перетворювачем механічних коливань під дією електричних імпульсів і реєстрації зриву цих механічних коливань при контакті поверхні ультразвукового перетворювача з рідиною ("Ультразвук", маленькая энциклопедия, ред ИП Галямина, с 320, р и с і , «Советская энциклопедия», М , 1979) Такий сигналізатор при конденсації парів рідини, випаданні осаду із суспензії чи попаданні бризок при наповненні резервуару на контактну поверхню датчика втрачає працездатність і видає сигнал про досягнення рівнем рідини заданої величини О СО (О 61934 лу демпфувати (чи зривати) механічні коливання контактної поверхні ще до підходу до неї рівня середовища, що вимірюється При цьому амплітуда механічних коливань контактної поверхні повинна бути вищою, ніж поріг початку розпилення конденсату, що треба для того, щоб наступило ультразвукове розпилення (механічне зтрушування) Встановлення часу реєстрації не меншим часу дії радіоімпульсу підвищує надійність роботи сигналізатора в умовах коливання рівня, так як пороговий елемент не буде реагувати на короткочасний залив контактної поверхні рідиною при нахилах або бовтанні на період, що не перевищує часу дії радіоімпульсу Тобто рівень рідини повинен заливати контактну поверхню на час, що доріПроте пристрій, реалізований по відомому внює, по крайній мірі, часу дії радіоімпульсу або способу в реальних умовах експлуатації в ЛІТНІЙ більший, тоді пороговий елемент видасть сигнал час із-за високої відносної вологості газового сепро досягнення рівня В умовах сильного і частого редовища в резервуарах, що супроводжується коливання рівня пороговий елемент може аналізуконденсацією парів рідин на елементах ультразвувати (інтегрувати) результати декількох періодів кового перетворювача (в зазорі між перетворювамеханічних коливань Вибір пауз між зондуючими чем і п'єзодатчиком), може помилково увімкнутися радіоімпульсами не більшими часу проходження Зимою ж на поверхні ультразвукового перетворювимірюваним рівнем зони похибки спрацювання вача може утворюватися наріст із шею і льоду, що сигналізатора гарантує непроходження вимірюватакож приводить до відмови сигналізатора При ним рівнем зони похибки спрацювання сигналізазаливі чи засипці матеріалів можливе забризкутора (зони його чутливості) в період його вимкненвання, що приводить до відмови первинного датня (тобто паузи) Іншими словами, в період чика і всього сигналізатора в цілому, тобто, знивимкнення сигналізатора (паузи) зміна рівня не ження надійності його роботи повинна "проскочити" зону похибки спрацювання В основу винаходу поставлено задачу розробсигналізатора відносно номінальної лінії спрацюки способу керування ультразвуковим сигналізавання, бо тоді знизиться точність сигналізатора тором рівня рідких і сипучих середовищ шляхом Сигналізатор міг би працювати весь час із високою надання ультразвуковому перетворювачу перери(достатньою для розпилення конденсату) амплітувчастих механічних коливань під дією радіоімпудою коливань контактної поверхні перетворювача, льсів і реєстрації сигналів в незалежності від наале тоді б із-за високих енергетичних затрат зниявності на контактній поверхні ультразвукового зився б його к к д і надійність (можливе механічне перетворювача конденсату, наросту шею чи льоду руйнування перетворювача) і вибором пауз між дією коливань контактної поверхні ультразвукового перетворювача і часу реєстСутність винаходу пояснюється рисунком, де рації для забезпечення підвищення точності і нана фіг 1 представлена структурна схема сигналідійності роботи сигналізатора, реалізованого по затора рівня для реалізації запропонованого споданому способу собу з часовими діаграмами Для рішення поставленої задачі в способі кеПристрій має ультразвуковий перетворювач 1, рування ультразвуковим сигналізатором рівня рідзакріплений в резервуарі 2 з рідиною, рівень якої ких і сипучих середовищ шляхом надання ультраконтролюється Ультразвуковий перетворювач 1 звуковому перетворювачу переривчастих має контактну поверхню 3 і зв'язаний з виходом механічних коливань під дією радіоімпульсів згідно генератора 4, що виробляє електричні сигнали виходу час дії радіоімпульсів встановлюють не для збудження перетворювача 1 на ультразвукоменшим часу очищення контактної поверхні ультвій частоті його механічного резонансу Генератор развукового перетворювача від конденсату, а час 4 управляється (вмикається або вимикається) імреєстрації встановлюють не меншим ніж час дії пульсним генератором 5, що виробляє імпульси радіоімпульсу, паузи між радіоімпульсами вибипрямокутної форми, частота яких нижче частоти рають не більшими часу проходження вимірювагенератора 4 Генератор 4 також має зв'язок з поним рівнем зони похибки спрацювання сигналізароговим елементом 6, що реагує, наприклад, на тора, при цьому амплітуду механічних коливань зміну струму в колі навантаження генератора 4 чи контактної поверхні ультразвукового перетворюна відхилення резонансної частоти ультразвукововача встановлюють не меншою порогу початку го перетворювача 2 Пороговий елемент р в свою розпилення конденсату чергу своїм виходом зв'язаний з індикатором 7, який може бути реалізований у виді звукового, Встановлення часу дії зондуючих імпульсів рісвітлового сигналу чи замикає контакти сигналізавним або більшим часу очищення (скидання з доції або насосної установки помогою механізму розпилення) контактної поверНайбільш близьким до запропонованого по сукупності ознак і технічному результату є спосіб управління імпульсним ультразвуковим сигналізатором рівня "(Морозов В Б «Дискретные и аналого-дискретные ультразвуковые уровнемеры», «Приборы и системы управления», №11, 1990, с 36, рис 1), що ґрунтується на наданні ультразвуковому перетворювачу переривчастих механічних коливань під дією зондуючих імпульсів із синфазною подачею стробуючих імпульсів на схему співпадання і реєстрацією сигналів, що сприймаються, п'єзодатчиком при досягненні рідиною номінального рівня, при цьому сигнал від п'єзодатчика співпадає із стробуючим сигналом хні ультразвукового перетворювача дозволяє ефективно за рахунок ультразвукового розпилення очищати контактну поверхню від всіх видів механічних забруднень, що попали на цю поверхню до роботи, або попадають на неї під час роботи Це не дозволяє рідкому конденсату або осаду пи Спосіб керування ультразвуковим сигналізатором рівня реалізується таким чином Після запуску сигналізатора генератор 4 виробляє електричні коливання, які перетворюються ультразвуковим перетворювачем 1 в механічні високоамплітудні коливання контактної поверхні 3 на резонансній 61934 частоті Одночасно імпульсний генератор 5 виробляє низькоамплітудні імпульси, які модулюють (імпульсно) резонансну частоту генератора 4 Таким чином на виході генератора 4 виробляються радіоімпульси прямокутної форми Контактна поверхня 3 коливається, наприклад, в поздовжньому напрямі {показано стрілочками) з амплітудою А на протязі часу t p і не коливається на протязі часу t n , коли відсутні електричні сигнали від генератора 4 При досягненні рівнем рідини, що контролюється в резервуарі 2 контактної поверхні 3 ультразвукового перетворювача 1 із-за збільшення акустичного опору (в рідині він зростає) змінюється імпеданс перетворювача 1 -він збільшується, при цьому змінюється струм в колі подачі електричних резонансних сигналів на ультразвуковий перетворювач 1 (він зменшується) Ця зміна струму в колі живлення ультразвукового перетворювача 1 фіксується пороговим елементом б, який виробляє сигнал досягнення рівня, що подається на індикатор 7 Цей сигнал відображається індикатором 7 у виді звукового, світлового сигналу чи замиканням контактів реле, яке, наприклад, вимикає насосну установку Час роботи перетворювача t p вибирається таким, щоб при попаданні на вібруючу контактну поверхню 3 залишків рідини, конденсату, іржі, шею вони встигають розпилюватися ультразвуковими коливаннями (скидатися) Амплітуда механічних коливань вібруючої поверхні А повинна бути більшою, ніж поріг початку ультразвукового розпилення забруднюючого конденсату, що уже налип до запуску сигналізатора Наприклад, для води в нормальних умовах вона звичайно складає величину не меншу 15-20мкм Час реєстрації (фіксації") зміни струму в колі живлення ультразвукового перетворювача вибирають не меншим часу роботи t p перетворювача Тобто зменшення струму через ультразвуковий перетворювач 1 повинно триматися на весь час дії радіоімпульсу або навіть при необхідності на час декількох радіоімпульсів (двох і більше) Тільки ТОДІ пороговий елемент [3 видає сигнал на індиктор 7 про досягнення рідиною заданного рівня Для того, щоб в момент паузи t n , рівень рідини, що переміщається, не пройшов зону спрацювання (зону чутливості) сигналізатора, час паузи вибирають не більшим прогнозованого чи розрахованого часу проходження вимірюваним рівнем зони похибки спрацювання сигналізатора В такому випадку точність спрацювання сигналізатора не погіршується, а його надійність і ДОВГОВІЧНІСТЬ із-за зменшення часу роботу силового електричного каскаду і ультразвукового перетворювача різко зростає Наприклад, при керуванні ультразвуковим сигналізатором рівня води час роботи перетворювача t p становив ЗОмс, а паузи між дією зондуючих радіоімпульсів становили 270мс Час реєстрації сигналів пороговим елементом становив 900мс (тобто на протязі трьох радіоімпульсів) Потужність, що споживалася таким сигналізатором, становила всього 4Вт, при цьому амплітуда коливань контактної поверхні ультразвукового перетворювача стержневого типу із концентратором становила 20мкм, що давало можливість скидати не тільки конденсат води, а також і осад пилових і жирових частинок Похибка спрацювання сигналізатора була не більша 1 мм Фіг. Комп'ютерна верстка А Ярославцева Підписне Тираж39 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності, Львівська площа, 8, м Київ, МСП, 04655, Україна ДП "Український інститут промислової власності", вул Сім'ї Хохлових, 15, м Київ, 04119
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for controlling an ultrasonic transducer for monitoring condensate level
Автори англійськоюChornyi Valerii Ivanovych
Назва патенту російськоюСпособ управления ультразвуковым преобразователем для контроля уровня конденсата
Автори російськоюЧерный Валерий Иванович
МПК / Мітки
МПК: G01F 23/28
Мітки: сигналізатором, рівня, керування, ультразвуковим, спосіб
Код посилання
<a href="https://ua.patents.su/3-61934-sposib-keruvannya-ultrazvukovim-signalizatorom-rivnya.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування ультразвуковим сигналізатором рівня</a>
Спосіб керування ультразвуковим розпилювачем палива двигуна внутрішнього згоряння
Номер патенту: 46035
Опубліковано: 15.05.2002
Автор: Чорний Валерій Іванович
МПК: B05B 17/04, F02M 27/00
Мітки: спосіб, згоряння, керування, розпилювачем, ультразвуковим, палива, двигуна, внутрішнього
Формула / Реферат:
1. Спосіб керування ультразвуковим розпилювачем палива двигуна внутрішнього згоряння шляхом надання порожнистому циліндричному вібратору через віброперетворювач переривчастих механічних коливань під дією електричної напруги, який відрізняється тим, що час дії електричної напруги змінюють пропорційно витратам палива, що розпилюється, а паузи між дією електричної напруги вибирають не більшими часу протікання палива по висоті порожнистого...
Пристрій керування ультразвуковим перетворювачем
Номер патенту: 54630
Опубліковано: 17.03.2003
Автори: Чорний Валерій Іванович, Мовчанюк Андрій Валерійович
МПК: H01L 41/08, B06B 1/06, G01N 29/22
Мітки: керування, ультразвуковим, пристрій, перетворювачем
Формула / Реферат:
Пристрій керування ультразвуковим перетворювачем, що містить послідовно з'єднані керований генератор, буферний каскад, що утворений транзистором, керуючий трансформатор, первинна обмотка якого з'єднана з транзистором буферного каскаду, підсилювач потужності, ультразвуковий перетворювач, а також пристрій виділення сигналу, обернено пропорційного струму, через ультразвуковий перетворювач, з'єднаний з входом керованого генератора, пристрій...
Електромагніт з сигналізатором положення якоря
Номер патенту: 59653
Опубліковано: 15.09.2003
Автори: Вовк Борис Петрович, Погребинський Володимир Самуїлович, Шапіро Борис Семенович, Кисіль Віктор Леонідович, Бойко Світлана Юхимівна
МПК: F16K 31/00
Мітки: електромагніт, сигналізатором, якоря, положення
Формула / Реферат:
Електромагніт з сигналізатором положення якоря, що має корпус, обмотку, якір зі штовхачем, важіль, пружину, постійний магніт та електричні контакти, що керуються магнітом, який відрізняється тим, що важіль з постійним магнітом на одному кінці другим кінцем шарнірно з’єднаний з корпусом і своєю середньою частиною підтиснений за допомогою пружини до штовхача, а електричні контакти, що керуються магнітом, розташовані в магнітному полі постійного...
Пристрій для визначення кількості жиру у молоці ультразвуковим методом
Номер патенту: 23216
Опубліковано: 19.05.1998
Автор: Кожем'якін Олексій Сергійович
МПК: G01N 29/00, G01N 33/06
Мітки: жиру, кількості, пристрій, ультразвуковим, визначення, методом, молоці
Формула / Реферат:
Пристрій для визначення кількості жиру у молоці ультразвуковим методом, у якому міститься мікрокомпресор, дозатор, вимірювальний осередок, електромагнітний клапан, зливна ємкість, ємкість для молока, обладнана трубкою для відбору молока, та блок керування, який відрізняється тим, що в нього встановлений додатковий електромагнітний клапан, який знаходиться між вимірювальним осередком і зливною ємкістю, та ємкість з мийним засобом, з'єднана з...
Сигналізатор рівня
Номер патенту: 24493
Опубліковано: 21.07.1998
Автори: СТЕЦКО МИХАЙЛО ГРИГОРОВИЧ, Шовкопляс Іван Петрович
МПК: G01F 23/24
Мітки: сигналізатор, рівня
Формула / Реферат:
1. Сигналізатор рівня, який складається з випрямляча змінної напруги, входом з'єднаного з первинним перетворювачем рівня, підсилювача постійного струму, входом підключеного до виходу випрямляча змінної напруги, пристрою сигналізації, з'єднаного з виходом підсилювача постійного струму - в кожному каналі, який відрізняється тим, що в сигналізатор добавлено N-каналів сигналізації для досягнення густоти позицій сигналізації не менше 4 позиції на...
Попередній патент: Ентеросорбент “фібрабет”
Наступний патент: Спосіб підтримання покрівлі у вугільних вибоях тонких пластів
Випадковий патент: Спосіб лікування кісти печінки