Спосіб гальмування транспортного засобу з автономною енергетичною установкою і електромеханічною трансмісією та пристрій для його реалізації
Номер патенту: 40223
Опубліковано: 16.07.2001
Автори: Коржикова Ольга Валеріївна, Корнет Владислав Миколайович, Кожушок Геннадій Миколайович, Величко Тетяна Володимирівна, Шевченко Олександр Іванович, Темченко Анатолій Георгійович, Родькін Дмитро Йосипович




Формула / Реферат
1. Спосіб гальмування транспортного засобу з автономною енергетичною установкою і електромеханічною трансмісією, що полягає в відключенні тягових двигунів від генератора і замиканні їх на гальмівні опори, контролі швидкості й струму якірних кіл тягових двигунів, швидкості первинного теплового двигуна й живленні власних потреб транспортного засобу від первинного теплового двигуна, який відрізняється тим, що гальмування здійснюють з підключеними якірними колами двигунів і генератора, контролюють потужність і швидкість тягового генератора шляхом змінювання подачі енергоносія в первинний двигун, припиняють подачу енергоносія при виконанні умов: Ред > Рвп, w = wгдоп + dw, де Ред - потужність тягового електродвигуна при гальмуванні; Рвп - потужність власних потреб транспортної системи; wгдоп - допустима кутова швидкість обертання вала тягового генератора; dw - допустиме відхилення кутової швидкості; під'єднують гальмівний резистор до якірного кола тягових двигунів і регулюють його струм в залежності від потужності гальмування, що розвивається тяговими двигунами, підгримують електромагнітну потужність тягового генератора на рівні: Рг = Рвп, де Рг - потужність тягового генератора; Рвп - потужність власних потреб транспортної системи; шляхом регулювання його струму збудження, а його швидкість встановлюють на рівні, що забезпечує заданий рівень вентиляції тягових двигунів і генератора.
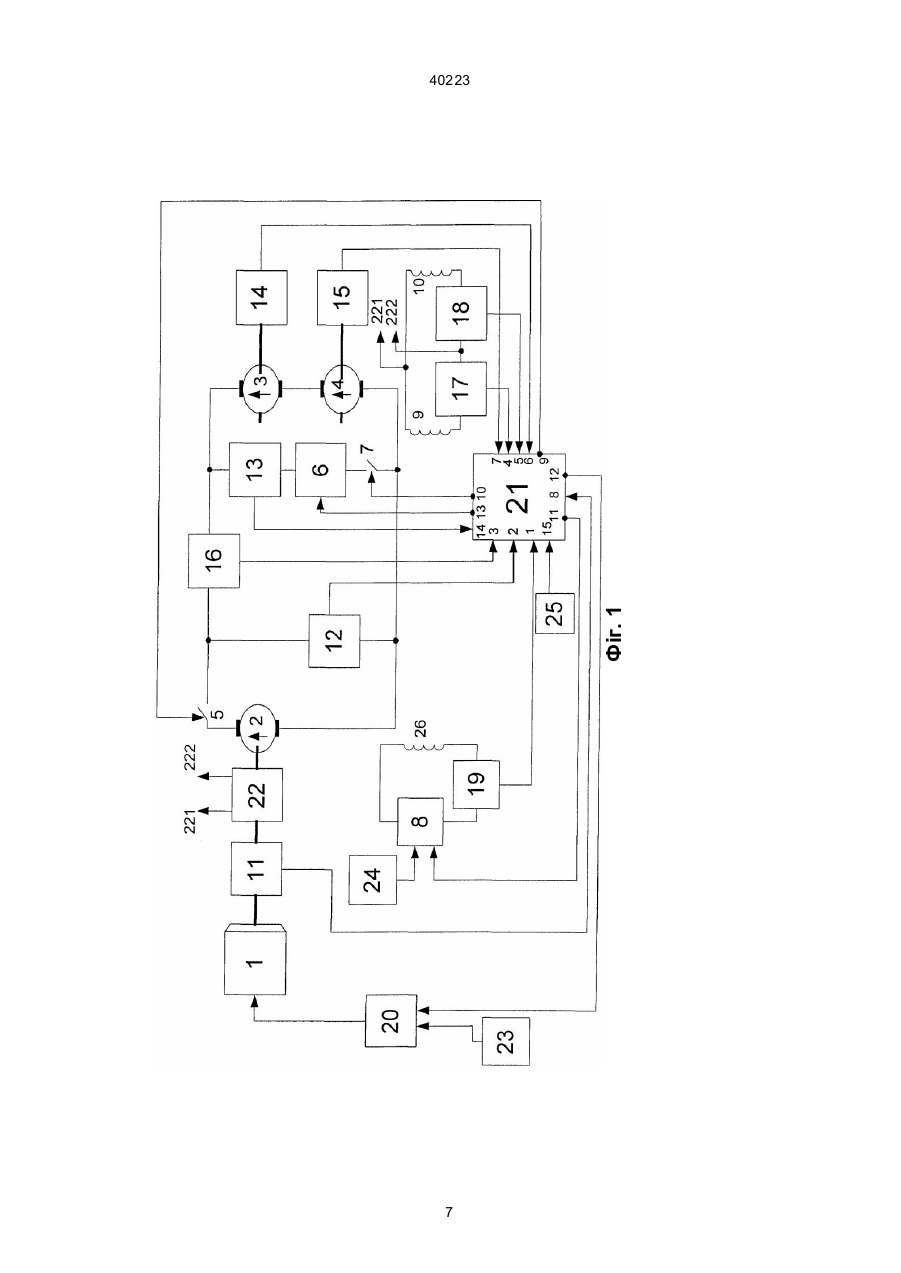
2. Пристрій, що здійснює спосіб гальмування транспортного засобу з автономною енергетичною установкою і електромеханічною трансмісією, має первинний тепловий двигун з генератором постійного струму на валу, тягові двигуни постійного струму, систему збудження генератора постійного струму й тягових двигунів, контактні апарати, що розмикають якірне коло генератора і підключають гальмівний реостат до якірного кола двигунів, систему управління паливоподачею первинного двигуна, який відрізняється тим, що він додатково обладнаний датчиком струму генератора, датчиком струму гальмівного резистора, датчиками струмів збудження генератора і тягових двигунів, бортовим обчислювальним блоком з одинадцятьма входами і чотирма виходами, причому перший вхід зв'язаний з виходом датчика струму збудження генератора, другий вхід - з виходом датчика напруги на якорі генератора, третій вхід - з виходом датчика струму якоря генератора, четвертий та п'ятий входи - з виходами датчиків струму збудження тягових двигунів, шостий та сьомий входи - з виходами датчиків швидкості тягових двигунів, восьмий вхід - з датчиком швидкості тягового генератора, дев'ятий і десятий виходи обчислювального блоку зв'язані з керуючими входами контактних апаратів якірного кола гальмівного резистора, одинадцятий і дванадцятий виходи зв'язані з керуючими входами блоків регулювання струму збудження генератора і управління подачею енергоносія, тринадцятий вихід з регулятором струму кола гальмівного опору, чотирнадцятий вхід - з датчиком струму кола гальмівного опору, п'ятнадцятий вхід - 3 блоком завдання гальмування.
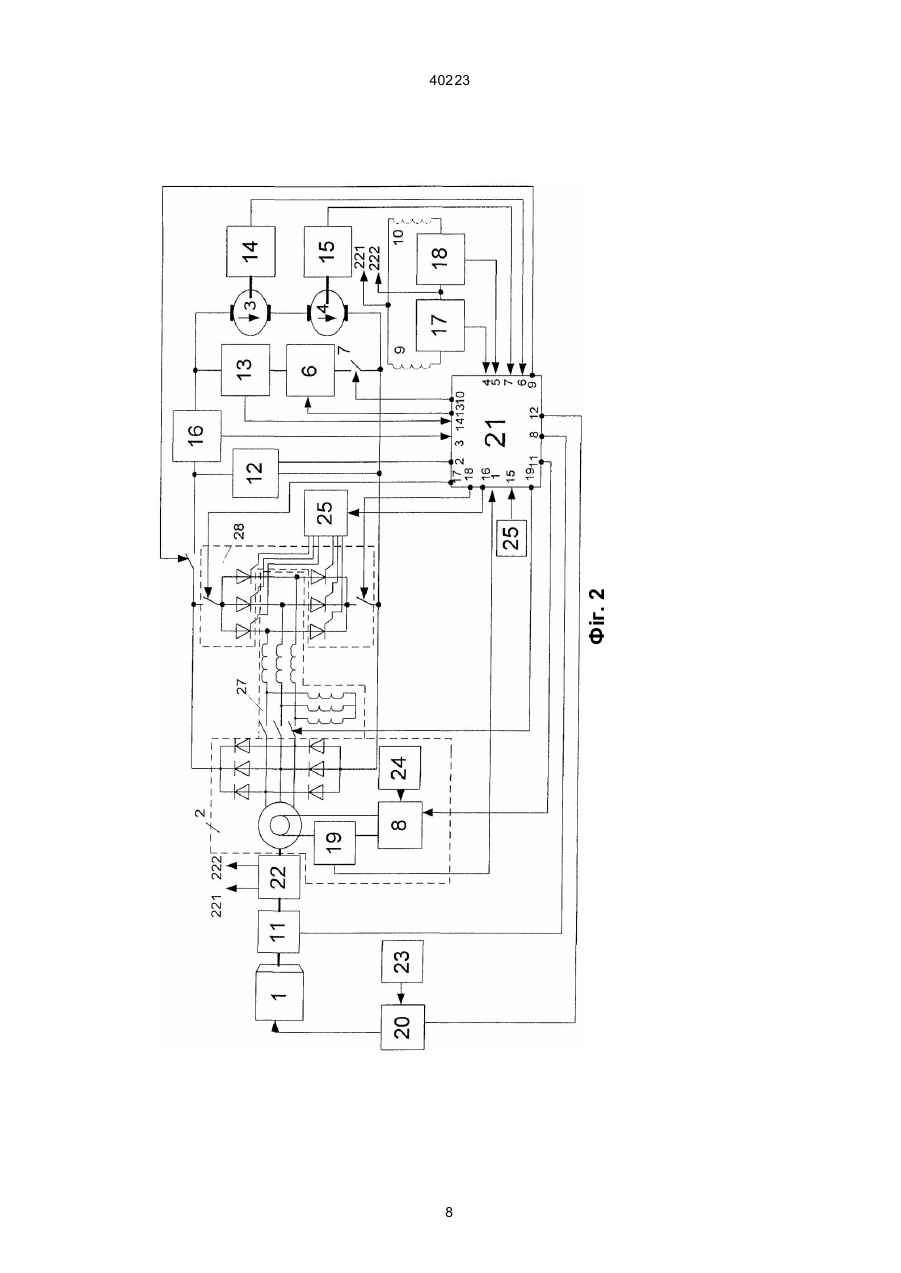
3. Пристрій по п. 2, який відрізняється тим, що як генератор використовується синхронна машина з незалежним збудженням і випрямлячем на затискачах статора, на затискачі випрямляча підключений мостовий інвертор із системою керування, яка синхронізована за напругою статора генератора, вихід і вхід мостового інвертора обладнані комутаційними апаратами, керуючі кола яких зв'язані з додатковими сімнадцятим, вісімнадцятим та дев'ятнадцятим виходами бортового обчислювального блока, вхід системи керування інвертора зв'язаний з шістнадцятим виходом обчислювального блока.
Текст
1. Спосіб гальмування транспортного засобу з автономною енергетичною установкою і електромеханічною трансмісією, що полягає в відключенні тягових двигунів від генератора і замиканні їх на гальмівні опори, контролі швидкості й стр уму якірних кіл тягових двигунів, швидкості первинного теплового двигуна й живленні власних потреб транспортного засобу від первинного теплового двигуна, який відрізняється тим, що гальмування здійснюють з підключеними якірними колами двигунів і генератора, контролюють потужність і швидкість тягового генератора шляхом змінювання подачі енергоносія в первинний двигун, припиняють подачу енергоносія при виконанні умов: Ред > Рвп, w=wгдоп+dw , де Ред - потужність тягового електродвигуна при гальмуванні; Рвп - потужність власних потреб транспортної системи; wгдоп - допустима кутова швидкість обертання вала тягового генератора; dw - допустиме відхилення кутової швидкості; під'єднують гальмівний резистор до якірного кола тягових дви гунів і регулюють його струм в залежності від потужності гальмування, що розвивається тяговими двигунами, підтримують електромагнітну потужність тягового генератора на рівні: Рг=Рвп, де Рг - потужність тягового генератора; Рвп - потужність власних потреб транспортної системи; шляхом регулювання його струму збудження, а його швидкість встановлюють на рівні, що забезпечує заданий рівень вентиляції тягових двигунів і генератора. 2. Пристрій, що здійснює спосіб гальмування транспортного засобу з автономною енергетичною установкою і електромеханічною трансмісією, має A (54) СПОСІБ ГАЛЬМУВАННЯ ТРАНСПОРТНОГО ЗАСОБУ З АВТОНОМНОЮ ЕНЕРГЕТИЧНОЮ УСТАНОВКОЮ І ЕЛЕКТРОМЕХАНІЧНОЮ ТРАНСМІСІЄЮ ТА ПРИСТРІЙ ДЛЯ ЙОГО РЕАЛІЗАЦІЇ 40223 Винахід належить до галузі електротехніки, і може бути використаний в системах електроприводу і енергозабезпечення транспортних засобів, обладнаних автономною енергетичною установкою з електромеханічною трансмісією. Сучасні системи електроприводу транспортних засобів практично не використовують режим генераторного гальмування. Основним гальмівним режимом є режим гальмування на активний опір. Використання такого режиму гальмування не ефективне внаслідок низького коефіцієнту корисної дії, втрат потужності на опорі, та ін. Прикладом таких систем є великовантажні автосамоскиди, тепловози та ін., де в якості автономної енергетичної установки виступає первинний дизельний чи турбінний двигун з генератором на валу. Привід транспортного засобу здійснюється за допомогою тягових електродвигунів, що живляться від автономного генератора. Спільним недоліком таких систем є те, що в гальмівних режимах запасена енергія не може бути повернена до мережі, як це реалізується в системах промислового електроприводу. Для отримання гальмівних режимів двигун переводять до режиму динамічного гальмування шляхом закорочування якоря двигуна на додатковий опір. При цьому причина низьких енергетичних показників є очевидною. Крім цього, в період гальмування первинний двигун працює зі зниженою потужністю, рівною потужності втрат, власних потреб транспортного засобу і т.п. Це додатково знижує економічну ефективність системи і її моторесурс. В цілому ряді випадків, наприклад, у гірській промисловості такі системи до 25% усього робочого часу працюють у гальмівному режимі (наприклад, спуск порожнього автосамоскиду в кар'єр по його борту). Рух униз здійснюється протягом 15-30 хвилин. Відомий спосіб гальмування транспортного засобу з автономною енергетичною установкою і електромеханічною трансмісією (Автомобили: Машины большой единичной мощности. Учеб. пособие / М.С. Высоцкий, А.И. Гришкевич, А.В. Зотов. - М.: Выш. шк., 1988. – С. 160: ил.). Спосіб гальмування полягає в тому, що в режимі електродинамічного гальмування в результаті уповільнення транспортного засобу його кінетична енергія перетворюється тяговими електродвигунами, що працюють у генераторному режимі, в електричну, котра спрямовується до блоку гальмівних резисторів, де вона перетворюється в теплову і розсіюється в атмосфері. При цьому тяговий генератор продовжує виробляти електричну енергію, необхідну для живлення послідовних обмоток збудження тягових електродвигунів. Недоліки даного способу гальмування полягають в наступному: первинний тепловий двигун продовжує працювати в рушійному режимі; виділена кінетична енергія тяговими двигунами, що працюють у генераторному режимі, повністю йде на втрати. Указані недоліки призводять до того, що знижуються ресурс теплового двигуна та економічні показники всієї системи. Найближчим до даного є технічне рішення: «Джерело потужності змінного струму для автомобіля» (United States Patent 4,415,848 Int.Cl.3 H02J007/14 H02P009/14 H02P009/42 Alternating current power source apparatus for car. Inventor: Mitsuharu Morishita) що являє собою джерело потужності змінного струму для транспортного засобу, до складу якого входять синхронний генератор на валу теплового двигуна, до ви ходу якого підключені два повністю керованих випрямляча, виходи яких живлять навантаження й канал регулювання збудження генератора в відповідності до напруги на навантаженні. Даний пристрій має принципову можливість здійснювати гальмування в рекуперативному режимі. Недоліки даного пристрою полягають у наступному: не здійснюється контроль струму силового кола; не здійснюється контроль потужності гальмування; не здійснюється контроль швидкості обертання вала первинного теплового двигуна; існують технічні проблеми при роботі пристрою в режимі гальмування. Указані недоліки призводять до того, що можливе виникнення аварійного режиму. Указане найближче технічне рішення є прототипом, бо має спільні суттєві ознаки з даним технічним рішенням. У даному винаході, вирішується задача підвищення економічності і надійності автономної енергосилової установки транспортної системи з електромеханічною трансмісією шляхом відключення первинного теплового двигуна в гальмівному режимі, що дасть змогу забезпечити збереження ресурсу роботи теплового двигуна та економію енергоносія. Суть способу винаходу полягає в тому, що поставлена задача вирішується тим, що при гальмування транспортного засобу з автономною енергетичною установкою і електромеханічною трансмісією під час гальмування керують якірним колом двигунів і генератора, контролюють потужність і швидкість тягового генератора шляхом змінювання подачі енергоносія в первинний двигун, припиняють подачу енергоносія при виконанні умов: Pед > Pвп ; wг=; wгд оп+dw , де: Ред - потужність тягового електродвигуна при гальмуванні; Pвп - потужність власних потреб транспортної системи; wг=w mд - к утова швидкість обертання вала тягового генератора та теплового двигуна; wгдоп - допустима кутова швидкість обертання вала тягового генератора по умові забезпечення охолодження електричних машин; dw - допустиме відхилення кутової швидкості. При перевищенні гальмівної потужності рівня потужності власних потреб під'єднують гальмівний резистор до якірного кола тягових двигунів і регулюють його струм в залежності від потужності гальмування, що розвивається тяговими двигунами, підтримують електромагнітну потужність тягового генератора на рівні: Рг=Рвп, де: Рг - потужність тягового генератора; шляхом регулювання його струму збудження, а його швидкість встановлюють на рівні, що забезпечує заданий рівень вентиляції тягових двигунів і генератора. 2 40223 Суть винаходу пояснюють креслення фіг. 1, 2, 3, 4, 5, 6, 7. На фіг. 1 та фіг. 2 приведені блоксхеми пристроїв, що реалізують спосіб гальмування транспортного засобу з автономною енергетичною установкою і електромеханічною трансмісією. На фіг. 3 - лінійна діаграма швидкості, стр уму та моменту пристроїв струму та моменту пристроїв, що реалізують спосіб гальмування транспортного засобу. На фіг. 4 - діаграма струмів, потужності, та споживання енергоносія пристроїв, що реалізують спосіб гальмування транспортного засобу. На фіг. 5 - принципова схема блока регулятора струму гальмівного опору. На фіг. 6 - стр уктурна схема бортового обчислювального блока. На фіг. 7 - алгоритм функціонування бортового обчислювального блока. Пристрій (фіг. 1) реалізує спосіб гальмування транспортного засобу з автономною енергетичною установкою і електромеханічною трансмісією, має тепловий двигун 1, тяговий генератор постійного струму 2, тягові двигуни 3, 4, контактний апарат якірного кола генератора 5, регулятор гальмівного струму 6, контактний апарат гальмівного контура 7, блок керування збудженням генератора постійного струму 8, обмотки збудження тягових двигунів 9, 10, датчик швидкості обертання валу теплового двигуна 11, датчик напруги 12, датчик гальмівного струму 13, датчики швидкості тягових двигунів 14, 15, датчик струму якірного кола 16, датчики струму збудження тягових двигунів 17, 18, датчики струму збудження тягового генератора 19, регулятор подачі енергоносія 20, бортовий обчислювальний блок 21, блок навантаження власних потреб 22, блок завдання кількості енергоносія 23, блок завдання струму зб удження тягового генератора 24, блок завдання на гальмування 25, обмотка збудження тягового генератора 26. Тепловий двигун 1, розташований на одному валу з генератором постійного струму 2 та навантаженням власних потреб 22, вихід блоку регулювання подачі енергоносія 20 під'єднано до входу теплового двигуна 1. До затискачів якірного кола генератора постійного струму 2 під'єднані послідовно через контактний апарат 5 та датчик струм у 16 тягові електродвигуни 3, 4, електродвигуни 3, 4 можуть бути з'єднані паралельно, в даних матеріалах заявки цей випадок не розглядається. Датчики струму та датчик напруги являються відомим технічним рішенням, і описані в літературі (Слежановский О.В., Бирюков А.В., Хуторецкий В.М. Устройства унифицированной блочной системы регулирования дискретного типа (УБСР-Д). - М.: Энергия, 1975 – С. 256). Паралельно до якірного кола тягових двигунів 3, 4 підключені через контакнтний апарат 7 послідовно блок регулювання гальмівного струм у 6 та датчик гальмівного струму 13. Паралельно до тягових двигунів 3,4 через датчик струму 16 підключений датчик напруги 12. До валів тягових двигунів 3, 4 механічно під'єднані датчики швидкості тягових двигунів 14, 15. До виходу блоку навантаження власних потреб 22, до сладу якого входить генератор-збуджувач, підключені паралельно через датчики струмів 17, 18 обмотки збудження тягових двигунів 9, 10, обмотки збудження можуть бути з'єднані послідовно, можуть мати власні регулятори струму збудження, в даних матеріалах заявки ці випадки не розглядаються. До виходу блока керування збудженням генератором постійного струму 8 через датчик струму збудження генератора 19 під'єднана обмотка збудження генератора постійного струму 26. Ви хід блоку завдання кількості енергоносія 23 (який при роботі транспортного засобу під керуванням водія являє собою педаль газу) підключений до входу блоку регулятора подачі енергоносія 20. Вихід блоку завдання струму збудження тягового генератора 24 (який являє собою, у випадку, коли транспортний засіб великовантажний кар'єрний самоскид, автоматичну систему керування тяговим режимом) підключений до входу блоку керування збудженням генератора постійного струму 8. Ви хід блоку завдання на гальмування 25 (який при роботі транспортного засобу під керуванням водія являє собою педаль гальмування) підключений до входу 15 блоку 21. До виходів 10, 11, 12, 13 бортового обчислювального блока 21 підключені входи блоків 7,8,20,6. До входів 1, 2, 3, 4, 5, 6, 7, 8, 9, 14 бортового обчислювального блока 21 підключені входи блоків 19, 12, 16, 17, 18, 14, 15, 11, 5, 13. У вихідному стані система забезпечує тяговий режим: подача енергоносія в первинний тепловий двигун 1 відповідає навантаженню, тяговий генератор 2 працює в генераторному режимі, тягові двигуни 3,4 працюють у р ушійному режимі. З механіки відомо, що рівняння механічної рівноваги для вала тягового електродвигуна під час тягового режиму має вигляд: Мдв= Мдин+Мс , де: Мдв - тяговий момент електродвигуна; Мдин - динамічний момент; Mс - момент опору. Динамічний момент має вигляд: Мдин = J пр × dwдв , dt де: Jпp - приведений до вала електродвигуна момент інерції; wдв - кутова швидкість обертання вала електродвигуна. Момент опору являє собою суму дво х складових моментів, одна з яких створена тангенціальною складовою сили земного тяжіння, друга - момент опору тертя, що побічно створений нормальною складовою сили земного тяжіння: 1 R 1 Rk , Мс = G × sin a × × k + G × k тр × cos a × × h i h i де: G - сила земного тяжіння; kтp - коефіцієнт тертя; a - кут нахилу шляху; Rk - радіус колеса; і - передаточне число редуктора; h - коефіцієнт корисної дії редуктора. Сигнали датчиків швидкості обертання 14, 15 електродвигунів мотор коліс контролюються бортовим обчислювальним блоком 21, та при їх істотній різниці, що свідчить про аварійний стан однієї з електричних машин мотор-коліс, транспортний засіб переводиться до режиму аварійного гальмування, цей режим в матеріалах заявки не розглядається. Бортовий обчислювальний блок з дискретністю, не меншою за 0.2 с (що відповідає часу реакції водія), визначає момент навантаження М на валу тягових дви гунів шляхом визначення похідної кутової швидкості обертання валів двигунів на під 3 40223 ставі сигналів датчиків швидкості обертання 14, 15, визначення моментів тягових двигунів 3, 4, визначаючи струм якірного кола по сигналу датчика струму 16 і струми збудження тягових двигунів 3,4 по сигналах датчиків струму 17, 18: Мс = Мдв - J пр × І збгп = де: І збгп - потрібний струм збудження тягового генератора; U - напруга на тягових двигуна х - сигнал датчика напруги 12; k збг - коефіцієнт збудження генератора; wг - кутова швидкість обертання вала генератора. По обчисленій величині потрібного якірного струму і поточній швидкості обертання моторколіс, що являє собою сигнал датчиків швидкості 14, 15 блок 21 обчислює значення гальмівної потужності: dwдв , dt де: Мдв - тяговий момент електродвигунів: Мдв=2×I я×кзбд×Iзбд, де: Кзбд - коефіцієнт збудження тягових двигунів; Ізбд - струм збудження тягових дви гунів. В залежності від напрямку руху відносно горизонтальної площини, тобто кута нахилу шля ху a, момент опору Мс може бути різного знаку. При наявності даних попередніх вимірів і сталої маси транспортного засобу G бортовий обчислювальний блок визначає кут нахилу шляху a: 2 æ G × Rk + G2 × R2 - M2 × h 2 × i2 + G2 × k 2 × Rk k c a = 2arctgç ç Mc × h × i + G × k × Rk è 2 Pгобч = 2 × wдв × І збд × к збд × І яп - Іяп × RS . Блок 21 порівнює обчислену гальмівну потужність з відомою потужністю власних потреб (визначеною, наприклад, в процесі налагодження), при цьому можливі три режими. 1. Гальмівна потужність дорівнює потужності власних потреб, у даному режимі буде проводитись гальмування з рекуперацією енергії на компенсацію втрат і потужності власних потреб транспортного засобу. 2. Гальмівна потужність менша за потужність власних потреб, у даному режимі блок 21 через блок 20 буде підтримувати швидкість обертання валу, подаючи енергоносій, що забезпечує заданий рівень вентиляції тягових двигунів і генератора, тим самим буде проводитись гальмування з рекуперацією енергії на компенсацію втрат і потужності власних потреб транспортного засобу. 3. Гальмівна потужність більша за потужність власних потреб, у даному режимі по сигналу 10 блоку 21 буде під'єднано через контакторний апарат 7 коло гальмівного опору. Величина струму в колі гальмівного опору регулюється блоком 6 по сигналу з виходу 13 блока 21 для підтримання якірного струму тягового генератора 2 на сталому рівні, тим самим буде проводитись гальмування з рекуперацією енергії на компенсацію втрат і потужності власних потреб транспортного засобу та до гальмівного опору. В випадку необхідності обчислення струму через гальмівний реостат, спочатку визначається струм тягового генератора який забезпечує потужність тягового генератора, рівну потужності власних потреб, тоді стр ум через гальмівний реостат: ö ÷. ÷ ø По сигналу блоку завдання на гальмування 25 або таких значеннях a та wдв, що свідчать про те, що транспортний засіб за номінальної швидкості почав рухатись згори, визначається необхідність переходу до гальмівного режиму. В випадку коли гальмівний режим визнано необхідним система переводиться до гальмівного режиму. Блок 25 повідомляє блоку 21 потрібну залежність швидкості від часу під час гальмування wгз(t). Бортовий обчислювальний блок 21 робить обчислення похідної швидкості та на її підставі необхідного гальмівного момента. При допущенні, що моменти за дискретний час гальмування сталі, гальмівний момент має вигляд: Мг = J пр dw зг ( t ) - Мс , dt де: Мг - момент електродвигуна гальмівний. З електротехніки відомо, що рівняння електричного балансу для якірного кола має вигляд: Е2-(Е3+Е4)=ІяRS, де: Е2-ЕРС тягового генератора; Е3+Е4 - ЕРС тягових двигунів - сигнал датчика напруги 12; Ія струм силового якірного кола; RS - сумарний опір якірного кола; а в свою чергу, потрібний якірний струм електричної машини незалежного збудження для обчисленого гальмівного моменту: I яn = (U + І яп × RS ) , wг × к збг І гр = Іяп Рвп , wг × к збг × І збг де: І збг - струм збудження генератора. По сигналу з ви ходу 9 бортового обчислювального блока 21 розмикається силове коло, припиняється по сигналу 12 блока 21 подача енергоносія в тепловий двигун 1 і блок 21 проводить завдання отриманих струмів гальмівного реостата та збудження тягового генератора сигналами з виходів 11 та 13 на входи блоків 8 та 6. По замиканню силового кола контактним апаратом 5 по сигналу з виходу 9 блоку 21 бортовий обчислювальний блок 21 по сигналах датчиків 16 та 12 +визначає поточну гальмівну потужність Рг та порівнює її з попере Мг , І збд × к збд де: І яn - потрібний струм якірного кола; Mг - потрібний гальмівний момент; І збд - струм збудження тягових двигунів; Кзбд - коефіцієнт збудження тягових двигунів. Для поточної швидкості тягового генератора 2 блок 21 визначає необхідний струм збудження: 4 40223 дньо обчисленої гальмівною потужністю Ргобч. У випадку їх нерівності проводиться корегування струму збудження генератора. В подальшому ході гальмування бортовий обчислювальний блок 21 проводить контроль швидкості обертання вала теплового двигуна. В випадку коли поточна швидкість обертання вала теплового двигуна виходить за межі: забезпечення номінального рівня вентиляції тягових двигунів та генератора. Характерними відзнаками третього режиму є: струм тягови х електродвигунів дорівнює струму тягового генератора; обертаючий момент генератора дорівнює моменту власних потреб транспортного засобу; кількість енергоносія, що споживається, дорівнює нулю. Характерними відзнаками четвертого режиму є: струм тягових електродвигунів більший від струму тягового генератора на величину струму гальмівного реостату; обертаючий момент генератора дорівнює моменту власних потреб транспортного засобу; кількість енергоносія, що споживається дорівнює нулю. Діаграма (фіг. 4) зображає залежності струмів, потужності, та споживання енергоносія пристроїв, що реалізують спосіб гальмування транспортного засобу від гальмівної потужності. З ростом гальмівної потужності зростає якірний струм тягових електродвигунів і тягового генератора, причому струм генератора дорівнює струму тягови х двигунів, а подача енергоносія зменшується, по досягненню гальмівної потужності рівня потужності власних потреб припиняється подача енергоносія до теплового двигуна; при подальшому зростанні гальмівної потужності підключається коло гальмівного опору, струм якоря тягових двигунів зростає, а струм якоря генератора залишається на попередньому рівні, і відрізняється від якірного струму тягових електродвигунів на величину струму в гальмівному опорі. Блок регулятора струму гальмівного опору (фіг. 5), який є відомим технічним рішенням, і описаний в літературі (Энергетическая электроника: Справочное пособие: Пер. с нем. / Под ред. В.А. Лабунцова. - М.: Энергоатомиздат, 1987 – С. 464: ил.). Блок регулятора струму гальмівного опора має в собі паралельно ввімкнені регулятор напруги та гальмівний опір. Регулятор напруги складається з електронного ключа, що періодично замикається, та діода, що шунтує навантаження. За рахунок зміни співвідношення між часом включеного та виключеного станів ключа досягається регулювання струму в колі гальмівного опору. Бортовий обчислювальний блок (фіг. 6), який є відомим технічним рішенням, і описаний в літературі (Строганов Р.П. Управляющие машины и их применение. Учеб. пособие для студентов спец. "Автоматика и телемеханика". - 2-е изд., перераб. и доп. -М.: Высш. шк., 1986. – С. 240: ил.). Бортовий обчислювальний блок являє собою керуючий обчислювальний комплекс (КОК) і має в своєму складі обчислювальну частину (04), пристрої зв'язку з об'єктом (ПЗО), пристрої зв'язку з оператором (ПЗОп), мультимашинні засоби (МЗ). До сладу обчислювальної частини КОК входять центральний процесор (ЦП), пристрої оперативної та зовнішньої пам'яті (ОП та ЗП), система вводу-виводу (СВВ), пульт керування КОК. Робота бортового обчислювального блока являє собою обробку ЦП сигналів датчиків об'єкта через ПЗО на підставі керуючої програми, що міститься в ОП, та параметрів заданих з пульта керування КОК. Бортовий обчислювальний блок 21 (фіг. 7) за допомогою датчиків здійснює постійне вимірюван wдопн
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and device for breaking transport means with independent power plant and electromechanical transmission
Автори англійськоюRodkin Dmytro Yosypovych, Temchenko Anatolii Heorhiiovych, Velychko Tetiana Volodymyrivna, Kozhushok Hennadii Mykolaiovych, Korzhykova Olha Valeriivna, Kornet Vladyslav Mykolaiovych, Shevchenko Oleksandr Ivanovych
Назва патенту російськоюСпособ торможения транспортного средства с автономной энергетической установкой и электромеханической трансмиссией и устройство для его реализации
Автори російськоюРодькин Дмитрий Иосифович, Темченко Анатолий Георгиевич, Величко Татьяна Владимировна, Кожушок Геннадий Николаевич, Коржикова Ольга Валериевна, Корнет Владислав Николаевич, Шевченко Александр Иванович
МПК / Мітки
МПК: H02P 9/14, H02J 7/14, H02P 9/00
Мітки: установкою, спосіб, електромеханічною, реалізації, трансмісією, засобу, пристрій, транспортного, гальмування, енергетичною, автономною
Код посилання
<a href="https://ua.patents.su/11-40223-sposib-galmuvannya-transportnogo-zasobu-z-avtonomnoyu-energetichnoyu-ustanovkoyu-i-elektromekhanichnoyu-transmisiehyu-ta-pristrijj-dlya-jjogo-realizaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб гальмування транспортного засобу з автономною енергетичною установкою і електромеханічною трансмісією та пристрій для його реалізації</a>
Спосіб рекуперації енергії гальмування транспортного засобу з паросиловою установкою та пристрій для рекуперації
Номер патенту: 11080
Опубліковано: 25.12.1996
Автор: Прогляда Леонід Петрович
МПК: F01B 29/00
Мітки: паросиловою, засобу, гальмування, спосіб, рекуперації, пристрій, транспортного, установкою, енергії
Текст:
...и выходные патрубки. Аккумулятор тепла также конструктивно 5 10 15 20 25 30 35 40 45 50 55 прост - это теплоизолированная емкость. Таким образом,заявляемый способ и заявляемое устройство обеспечили упрощение конструкции устройства для рекуперации и его небольшие весогабаритные характеристики, что в свою очередь повысило эффект от рекуперации энергии торможения Следовательно, заявляемые способ и устройство соответствуют...
Пристрій сигналізації гальмування транспортного засобу

Номер патенту: 31391
Опубліковано: 15.12.2000
Автор: Клименко Вадим Іванович
МПК: B60Q 1/44
Мітки: пристрій, гальмування, засобу, сигналізації, транспортного
Формула / Реферат:
Пристрій сигналізації гальмування транспортного засобу, що містить групу з'єднаних сигнальних ламп з електричними контактами, джерело живлення, формувач сигналу гальмування, замикаючий контакт якого механічно пов'язаний із педаллю гальмування, який відрізняється тим, що він додатково містить n - груп сигнальних ламп з електричними контактами, причому формувач сигналу гальмування виконаний в вигляді циліндра, в середині якого розміщений...
Пристрій сигналізації гальмування транспортного засобу з оптичним ефектом псевдозближення
Номер патенту: 34682
Опубліковано: 15.03.2001
Автор: Зайченко Олег Григорович
МПК: B60Q 1/00
Мітки: пристрій, сигналізації, транспортного, засобу, гальмування, псевдозближення, ефектом, оптичним
Формула / Реферат:
Пристрій сигналізації гальмування транспортного засобу з оптичним ефектом псевдозближення, який містить стоп-сигнали, світлове поле яких виконане із світловипромінюючих елементів, з'єднаних з джерелом живлення через перемикач, зв'язаний з педаллю гальма, який відрізняється тим, що світлове поле стоп-сигналів розділене на світловипромінюючі ділянки, - ділянка світлової плями у вигляді геометричної фігури розташована в центрі світлового поля, а...
Спосіб зниження аеродинамічних втрат від лобового опору транспортного засобу та пристрій для його здійснення

Номер патенту: 27557
Опубліковано: 15.09.2000
Автор: Мороз Петро Пилипович
МПК: B62D 35/00
Мітки: аеродинамічних, транспортного, здійснення, лобового, зниження, спосіб, засобу, опору, пристрій, втрат
Текст:
...на его вспо могательном тяговом движителе энергии набегаю щего потока встречного воздуха в дополнитель ную тяговую силу, отличающийся тем. что в ка честве вспомогательного тягового движителя при меняют закрепляемые на лобовых поверхностях транспортного средства или его вспомогательных элементах аэродинамические несущие поверхнос ти или комбинации из них, на которые набегаю щий поток встречного воздуха подают отклонен ным лобовыми...
Спосіб блокування диференціалу транспортного засобу та механізм для його реалізації
Номер патенту: 15637
Опубліковано: 30.06.1997
Автори: Трунов Олександр Міколайович, Колесніченко Віталій Олександрович, Каліта Анатолій Іванович, Голумб Леонід Борисович, Куцурубов Валерій Георгійович, Тімончик Валерій Іванович
МПК: F16H 48/00
Мітки: диференціалу, механізм, спосіб, транспортного, засобу, блокування, реалізації
Формула / Реферат:
(57) 1.Способ блокировки дифференциала транспортного средства, заключающийся в увеличении сопротивления относительному вращению элементов дифференциала при увеличении заданной разницы скоростей вращения ведущих колес транспортного средства посредством изменения характеристики жидкостного наполнителя, отличающийся тем, что указанное увеличение сопротивления осуществляют увеличением вязкости жидкостного наполнителя, являющегося ферромагнитной...
Попередній патент: Магносгель для лікування гіперінтоксикації у дітей та дорослих та спосіб його одержання
Наступний патент: Гіраторний вимірювальний перетворювач
Випадковий патент: Спосіб лікування хронічних простатитів