Спосіб діагностики асинхронного двигуна та пристрій для його здійснення
Номер патенту: 50115
Опубліковано: 15.10.2002
Автори: Волощенко Олександр Михайлович, Лашко Юрій Вікторович, Родькін Дмитро Йосипович, Головко Олег Степанович, Гладир Андрій Іванович, Чорний Олексій Петрович
Формула / Реферат
1. Спосіб діагностики асинхронного двигуна, який полягає в підключенні асинхронного двигуна через тиристорний регулятор до джерела промислової частоти та вимірюванні миттєвих значень напруги та струму статорного ланцюга, який відрізняється тим, що за даними вимірів розраховують миттєві значення електромагнітного моменту АД, за допомогою обчислювального блока також розраховують значення електромагнітного моменту АД за паспортними даними, отримують різницю розрахованих моментів та виконують її гармонічний аналіз, за результатами аналізу роблять висновок щодо стану асинхронного двигуна.
2. Пристрій, що реалізує спосіб діагностики асинхронного двигуна, який включає тиристорний регулятор, асинхронний двигун, вимірювачі струму та напруги, вимірювально-обчислювальний комплекс, який відрізняється тим, що він додатково обладнаний блоком перетворення напруги, входи якого підключені до виходів вимірювачів лінійної напруги на статорі, визначення миттєвих значень електромагнітного моменту, виходи блока перетворення лінійної напруги підключені до четвертого, п'ятого та шостого входів блока визначення електромагнітного моменту, перший, другий та третій входи якого підключені до вимірювачів струму статора, вихід блока визначення електромагнітного моменту підключений до першого входу суматора, другий вхід якого підключений до виходу вимірювально-обчислювального блока, входи якого підключені до виходів блока перетворення лінійної напруги, вихід суматора підключений до блока аналізатора спектра.
3. Пристрій, що реалізує спосіб діагностики асинхронного двигуна по п. 2., який відрізняється тим, що четвертий вхід блока визначення миттєвих значень електромагнітного моменту підключений до першого входу першого блока множення, другий вхід якого підключений до першого входу блока визначення миттєвих значень електромагнітного моменту, який підключений до першого входу другого блока множення, другого входу третього блока множення та через перший масштабуючий блок підключений до другого входу першого суматора і другого входу другого блока множення, вихід першого суматора підключений до першого входу третього блока множення, причому п'ятий вхід блока визначення миттєвих значень електромагнітного моменту підключений до першого входу четвертого блока множення, другий вхід якого підключений до другого входу блока визначення миттєвих значень електромагнітного моменту, який підключений до першого входу п'ятого блока множення, другого входу шостого блока множення та через другий масштабуючий блок підключений до другого входу другого суматора і другого входу п'ятого блока множення, вихід другого суматора підключений до першого входу шостого блока множення, причому шостий вхід блока визначення миттєвих значень електромагнітного моменту підключений до першого входу сьомого блока множення, другий вхід якого підключений до третього входу блока визначення миттєвих значень електромагнітного моменту, який підключений до першого входу восьмого блока множення, другого входу дев'ятого блока множення та через третій масштабуючий блок підключений до другого входу третього суматора і другого входу восьмого блока множення, вихід третього суматора підключений до першого входу дев'ятого блока множення, вихід якого підключений до третього входу четвертого суматора перший і другий входи якого підключені до виходів третього та шостого блоків множення, причому виходи першого, четвертого та сьомого блоків множення підключені до входів п'ятого суматора, виходи другого, п'ятого та восьмого блоків множення підключені до входів шостого суматора, виходи третього, шостого та дев'ятого блоків множення підключені до входів четвертого суматора, виходи п'ятого, шостого та четвертого суматорів підключені до входів сьомого суматора, вихід якого підключений до четвертого масштабуючого блока.
4. Пристрій, що реалізує спосіб діагностики асинхронного двигуна по п. 2, який відрізняється тим, що блок визначення миттєвих значень електромагнітного моменту виконаний за допомогою обчислювального комплексу, що програмується.
Текст
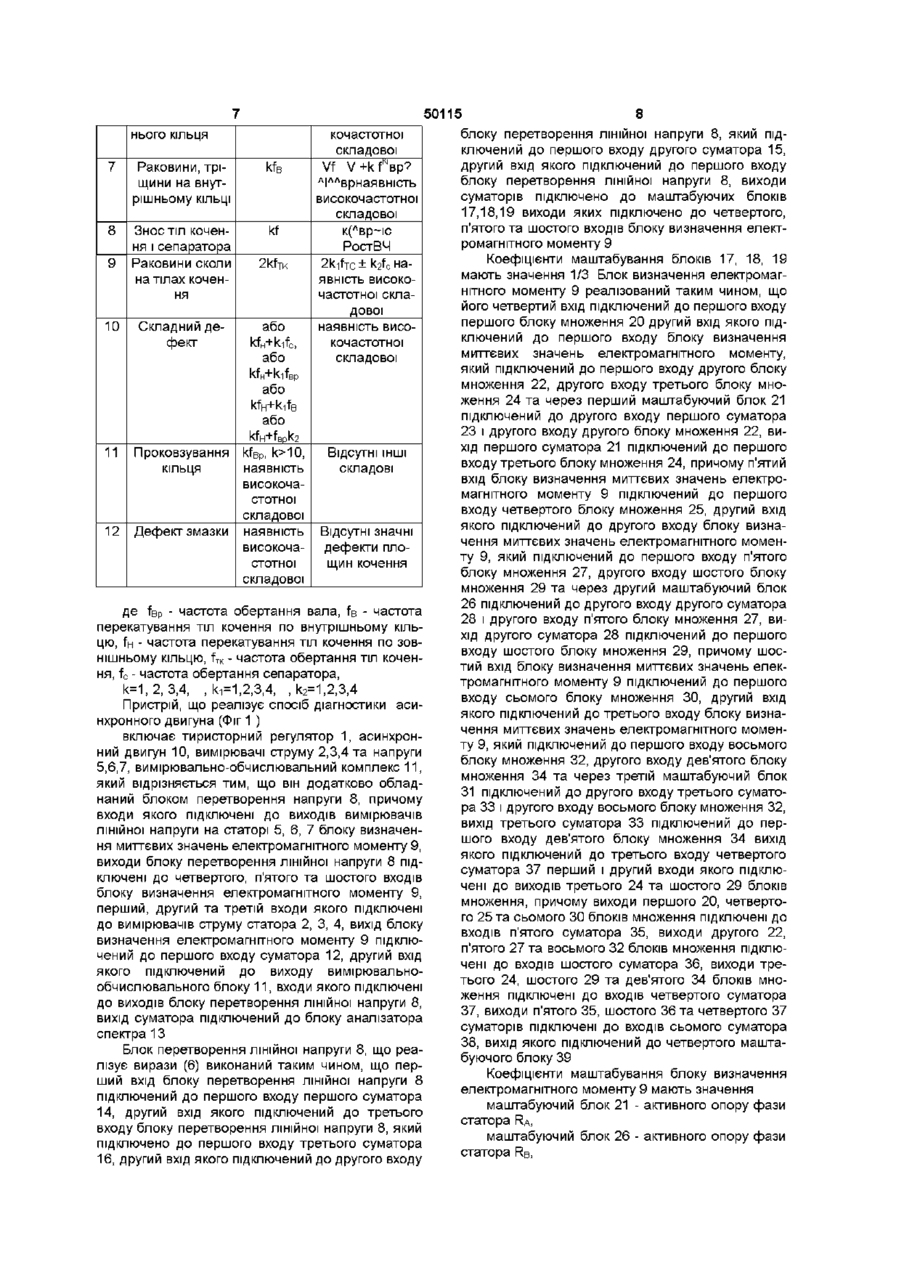
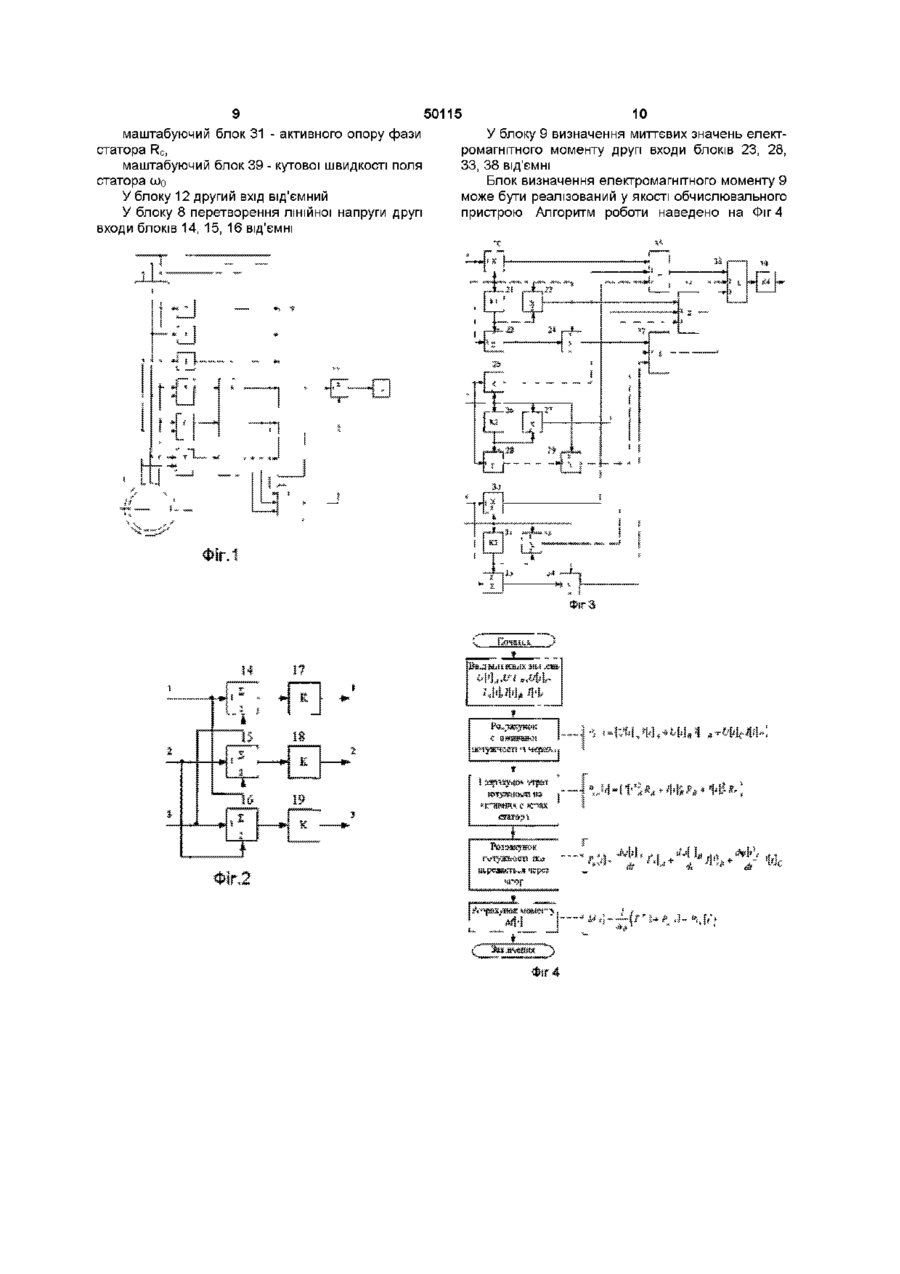
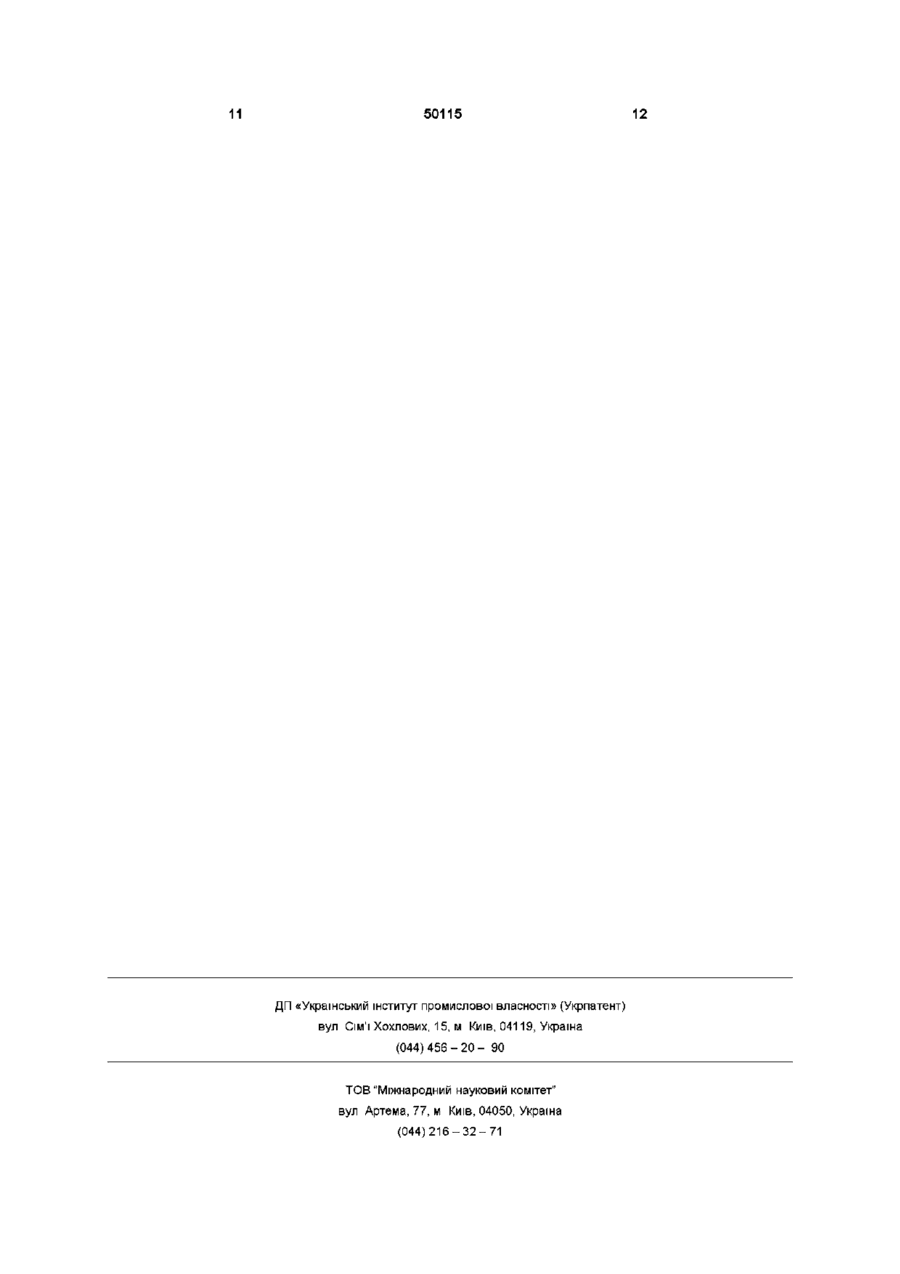
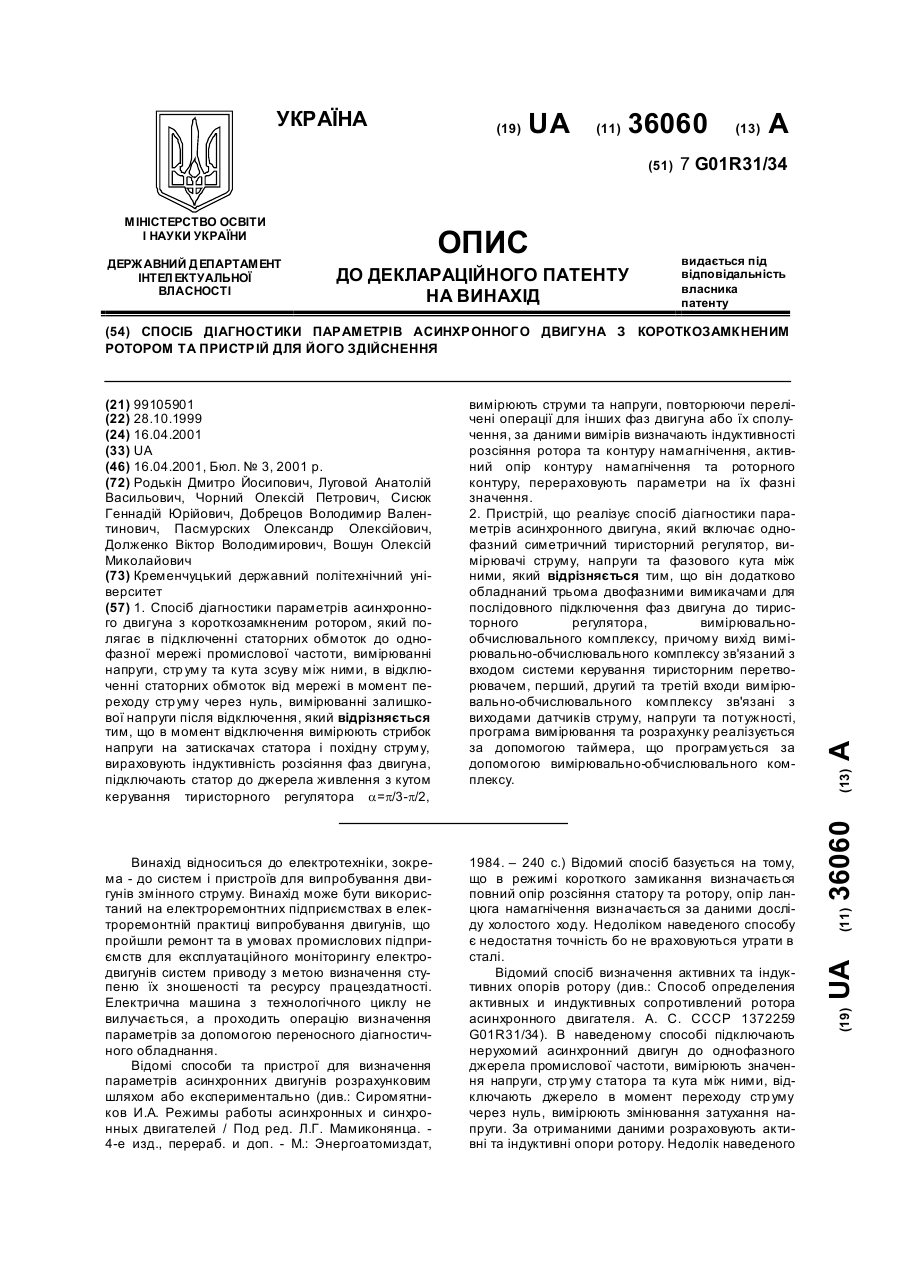
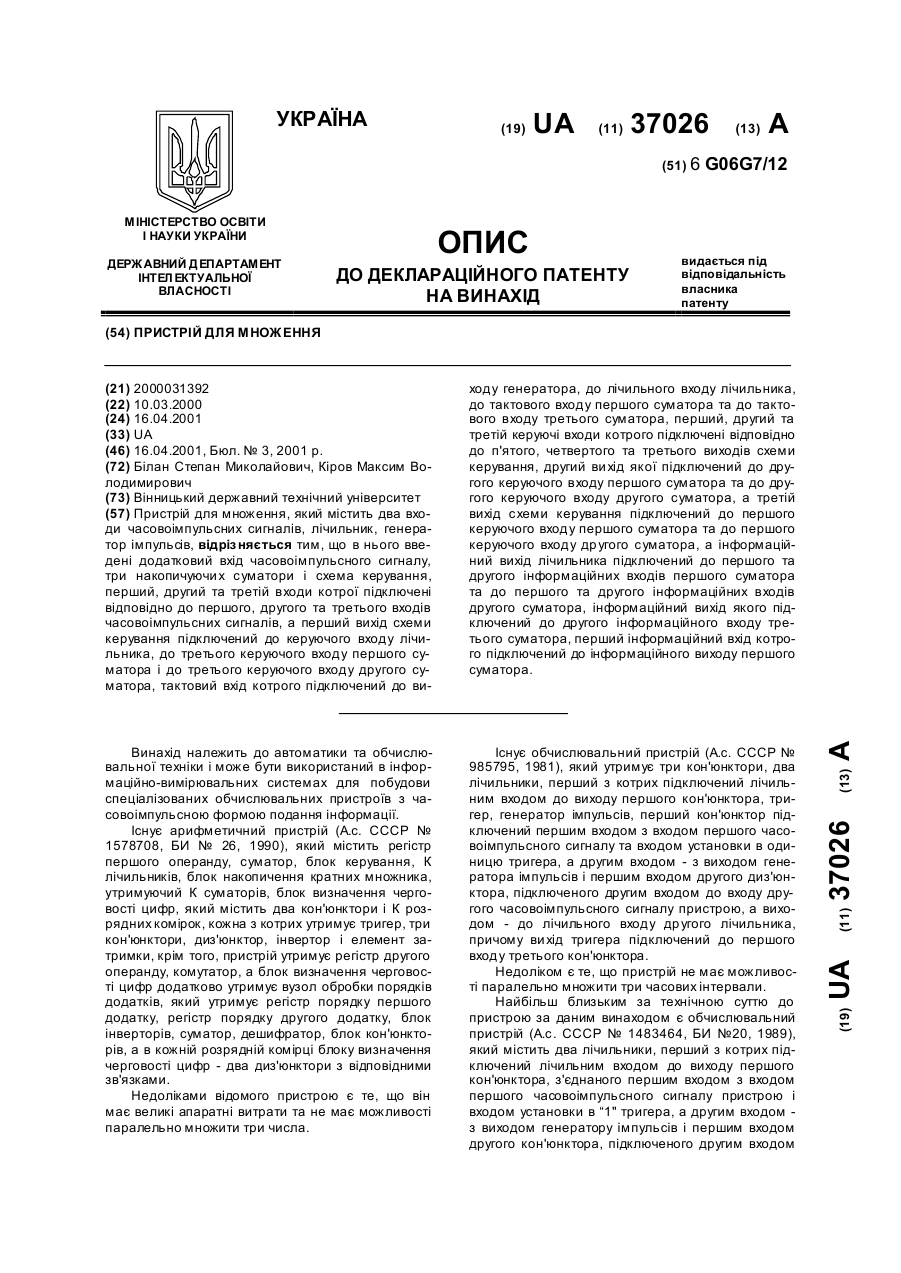
1 Спосіб діагностики асинхронного двигуна, який полягає в підключенні асинхронного двигуна через тиристорний регулятор до джерела промислової частоти та вимірюванні миттєвих значень напруги та струму статорного ланцюга, який відрізняється тим, що за даними вимірів розраховують миттєві значення електромагнітного моменту АД, за допомогою обчислювального блока також розраховують значення електромагнітного моменту АД за паспортними даними, отримують різницю розрахованих моментів та виконують її гармонічний аналіз, за результатами аналізу роблять висновок щодо стану асинхронного двигуна 2 Пристрій, що реалізує спосіб діагностики асинхронного двигуна, який включає тиристорний регулятор, асинхронний двигун, вимірювачі струму та напруги, вимірювально-обчислювальний комплекс, який відрізняється тим, що він додатково обладнаний блоком перетворення напруги, входи якого підключені до виходів вимірювачів лінійної напруги на статорі, визначення миттєвих значень електромагнітного моменту, виходи блока перетворення лінійної напруги підключені до четвертого, п'ятого та шостого входів блока визначення електромагнітного моменту, перший, другий та третій входи якого підключені до вимірювачів струму статора, вихід блока визначення електромагнітного моменту підключений до першого входу суматора, другий вхід якого підключений до виходу вимірювально-обчислювального блока, входи якого підключені до виходів блока перетворення лінійної напруги, вихід суматора підключений до блока аналізатора спектра 3 Пристрій, що реалізує спосіб діагностики асинхронного двигуна по п 2 , який відрізняється тим, що четвертий вхід блока визначення миттєвих значень електромагнітного моменту підключений до першого входу першого блока множення, другий вхід якого підключений до першого входу блока визначення миттєвих значень електромагнітного моменту, який підключений до першого входу другого блока множення, другого входу третього блока множення та через перший масштабуючий блок підключений до другого входу першого суматора і другого входу другого блока множення, вихід першого суматора підключений до першого входу третього блока множення, причому п'ятий вхід блока визначення миттєвих значень електромагнітного моменту підключений до першого входу четвертого блока множення, другий вхід якого підключений до другого входу блока визначення миттєвих значень електромагнітного моменту, який підключений до першого входу п'ятого блока множення, другого входу шостого блока множення та через другий масштабуючий блок підключений до другого входу другого суматора і другого входу п'ятого блока множення, вихід другого суматора підключений до першого входу шостого блока множення, причому шостий вхід блока визначення миттєвих значень електромагнітного моменту підключений до першого входу сьомого блока множення, другий вхід якого підключений до третього входу блока визначення миттєвих значень електромагнітного моменту, який підключений до першого входу восьмого блока множення, другого входу дев'ятого блока множення та через третій масштабуючий блок підключений до другого входу третього суматора і другого входу восьмого блока множення, вихід третього суматора підключений до першого входу дев'ятого блока множення, вихід якого підключений до третього входу четвертого суматора перший і другий входи якого підключені до виходів третього та шостого блоків множення, причому виходи першого, четвертого та сьомого блоків множення підключені до входів п'ятого суматора, виходи другого, п'ятого та восьмого блоків множення підключені до входів шостого суматора, виходи третього, шостого та дев'ятого блоків множення підключені до входів четвертого суматора, виходи п'ятого, шостого та четвертого суматорів підключені до входів сьомого суматора, вихід якого підключений до четвертого масштабуючого блока ю о ю З 50115 4 4 Пристрій, що реалізує спосіб діагностики асинмагнітного моменту виконаний за допомогою обхронного двигуна по п 2, який відрізняється тим, числювального комплексу, що програмується що блок визначення миттєвих значень електро Винахід відноситься до електротехніки, зокрема до систем і пристроїв для випробування та визначення стану двигунів змінного струму Винахід може бути використаний на електроремонтних підприємствах в електроремонтній практиці випробування двигунів, що пройшли ремонт та в умовах промислових підприємств для експлуатаційного моніторингу електродвигунів систем приводу з метою визначення ступеню їх зношеності та ресурсу працездатності Електрична машина може з технологічного циклу не вилучатися, а проходити операцію визначення діагностики за допомогою переносного діагностичного обладнання Найважливішим інформаційним показником, що характеризує подальшу працездатність АД, є електромагнітний момент Наявність змінної складової електромагнітного моменту вказує на розвиток передаварійної ситуації і вихід АД з ладу На сьогодні відсутні ефективні засоби репстрації електромагнітного моменту, а датчики моменту на базі пристроїв вимірювання швидкості або прискорення, акселерометрів мають значні інерційні складові, що вносить суттєву похибку у результати вимірювання ВІДОМІ способи та пристрої для визначення та розрахунку електромагнітного моменту АД [Асинхронные электроприводы с векторным управлением/В В Рудаков, И М Столяров, В А Дартау -Л Энергоатомиздат, Ленингр отд-ние, 1987,- 136 с ] Відомий спосіб базується на тому, вимірюють струм та напругу статора за допомогою датчиків напруги та струму, додатково вимірюють потокозчеплення за допомогою встановлених у пазах двигуна датчиків Хола За даними напруги, струму та потокозчеплення розраховують електромагнітний момент двигуна Недоліками наведеного способу є наступне - недостатня точність, бо потокозчеплення розраховується за побічними показниками, - даний спосіб працездатний лише за умови, що АД є симетричною машиною з рівними параметрами по фазам, - не враховуються утрати в сталі машини Відомий спосіб діагностики асинхронного двигуна [Спосіб діагностики параметрів асинхронного двигуна з короткозамкненим ротором та пристрій для його здійснення, Деклараційний патент на винахід 36060 A, G01R31/34] В наведеному способі підключають асинхронний двигун до джерела напруги промислової частоти, вимірюють значення напруги, струму статора За отриманими даними розраховують активні та індуктивні опори ротору Недолік наведеного способу полягає в тому, що розраховані параметри схеми заміщення на дозволяють оцінити стан механічної системи двигуна вигин вала, дефекти в підшипниках, тощо Наведений спосіб приймається в якості прототипу Задача, що вирішується запропонованим спо собом передбачає підвищення точності та достовірності діагностики асинхронного двигуна Сутність запропонованого способу визначення параметрів асинхронних двигунів передбачає наступне Асинхронний двигун через перетворювач підключають до джерела промислової частоти та вимірюють миттєві значення напруги та струму статорного ланцюга За даними вимірів розраховують миттєві значення електромагнітного моменту АД За допомогою обчислювального блоку також розраховують значення електромагнітного моменту АД за паспортними даними Отримують різницю розрахованих моментів та виконують її гармонічний аналіз За результатами аналізу роблять висновок щодо стану асинхронного двигуна Запропонований спосіб ілюстрований наступними фігурами Фіг 1 Блок-схема пристрою для реалізації способу Фіг 2 Блок-схема блоку 8 перетворення лінійної напруги Фіг 3 Блок-схема блоку 9 визначення миттєвих значень електромагнітного моменту Фіг 4 Алгоритм роботи блоку 9 Сутність способу заключається у наступному Статор асинхронного двигуна 10 під'єднаний до мережі через тиристорний регулятор напруги При пуску двигуна здійснюється вимірювання струмів статора та ЛІНІЙНИХ напруг на статорі АД Миттєві значення електромагнітного моменту можна розраховуються блоком 9 використовуючи рівняння балансу потужностей Потужність, що споживається із мережі Рі дорівнює потужності, що враховує зміну запасу електромагнітної енергії Рм, потужності, що передається через зазор Р эн та втрати потужності на активних опорах обмоток статора Р і н (утрати в МІДІ статора) Шукане рівняння електромагнітного моменту має вигляд _L, (1) Складові потужностей - споживана із мережі (2) - утрати потужності на активних опорах обмоток статора (3) - потужності, що передається через зазор P 11 = • 7 (4) 50115 де U[I]A,U[I]B, U[I] C МИТТЄВІ значення фазної на пруги на статорі АД, І[і]д, І[і]в, І[і]с - миттєві значення фазних струмів статора АД, RA.RB.RC - фазні опори статора АД, dt ' dt ' dt - ПОХІДНІ фазних потокозчеплень статора АД Значення похідних фазних потокозчеплень розраховуються на основі системи рівнянь електричної рівноваги dt (11) dt dt (5) dt dt (10) J = U[i]c-lb]cR Враховуючи, що здійснюється вимірювання ЛІНІЙНИХ напруг у блоку 8 здійснюється перетворення їх на фазні за виразами (6) Одночасно значення фазних напруг на статорі АД подаються до обчислювального блоку 11, що являє собою мікропроцесорний пристрій із вбудованими ЦАП та АЦП Обчислювальний блок 11 за фазними напругами розраховує миттєві значення електромагнітного моменту за повною системою рівнянь АД враховуючи тільки паспортні дані двигуна активні опори статора та ротора, власні та взаємні індуктивності статора та ротора, тощо де І[і]а, І[і]ь, І[і]с - миттєві значення фазних струмів ротора АД, Ra, Rb, Re -фазні опори ротора, dt - миттєві значення похідdt dt ш w них фазних потокозчеплень ротора АД, J - момент інерції, ш[/] - миттєві значення кутової швидкості, у[і]- миттєві значення кута обертання ротора, Мс статичний момент навантаження Розрахований таким чином електромагнітний момент М[і]щеал являє собою "ідеальний електромагнітний момент АД" бо не враховує стану механічної та магнітної системи двигуна Для виконання операції діагностування отримуємо різницю розрахованих моментів у блоці 12 лм[і)=м[ї\-м[ї\ідеад) і часову залежність ДМ[і] = f(t) розкладаємо на гармонічні складові, використовуючи спектроаналізатор 13 За значеннями гармонічних складових робимо висновок щодо стану АД Наприклад у таблиці наведено діагностичні показники дефекту механічної частини АД за гармонічними складовими моменту Таблиця Частоти складових спектра вібрації, що використовують для визначення і ідентифікації дефектів ПІДШИПНИКІВ кочення № п/п dt U) 1 Вид дефекту Обкатування ЗОВНІШНЬОГО (непорушного) Частоти Частоти додатосновних кових показників показників наявність висоfBp кочастотної складової КІЛЬЦЯ 2 3 dt Неоднорідний радіальний натяг Перекос зовнішнього (непо 2kfBp 2fH fH наявність високочастотної складової наявність високочастотної складової наявність висо рушного) КІЛЬЦЯ dt dt (8) 4 Знос зовніш нього КІЛЬЦЯ 5 Раковини, тріщини на зовні 6 Знос kfH шньому КІЛЬЦІ внутріш KfBp 50115 НЬОГО КІЛЬЦЯ 7 Раковини, тріщини на внутрішньому КІЛЬЦІ kf B 8 Знос тіл кочення і сепаратора Раковини сколи на тілах кочен kf 9 2kfTK ня 10 Складний дефект або kfH+kifc, або кочастотної складової N Vf V+kf Bp? л лл І врнаявність високочастотної складової Л к( вр~іс РостВЧ 2Мтс ± k2fc наявність високочастотної складової наявність високочастотної складової kfH+kifBp або kf H +kif B або 11 12 Проковзування kfep, k>10, Відсутні ІНШІ КІЛЬЦЯ наявність складові високочастотної складової Дефект змазки наявність Відсутні значні високоча- дефекти плостотної щин кочення складової де f B p - частота обертання вала, f B - частота перекатування тіл кочення по внутрішньому кільцю, fn - частота перекатування тіл кочення по зовнішньому кільцю, fTK - частота обертання тіл кочення, f c - частота обертання сепаратора, к=1,2, 3,4, , кі=1,2,3,4, ,к2=1,2,3,4 Пристрій, що реалізує спосіб діагностики асинхронного двигуна (Фіг 1 ) включає тиристорний регулятор 1, асинхронний двигун 10, вимірювачі струму 2,3,4 та напруги 5,6,7, вимірювально-обчислювальний комплекс 1 1 , який відрізняється тим, що він додатково обладнаний блоком перетворення напруги 8, причому входи якого підключені до виходів вимірювачів лінійної напруги на статорі 5, 6, 7 блоку визначення миттєвих значень електромагнітного моменту 9, виходи блоку перетворення лінійної напруги 8 підключені до четвертого, п'ятого та шостого входів блоку визначення електромагнітного моменту 9, перший, другий та третій входи якого підключені до вимірювачів струму статора 2, 3, 4, вихід блоку визначення електромагнітного моменту 9 підключений до першого входу суматора 12, другий вхід якого підключений до виходу вимірювальнообчислювального блоку 11, входи якого підключені до виходів блоку перетворення лінійної напруги 8, вихід суматора підключений до блоку аналізатора спектра 13 Блок перетворення лінійної напруги 8, що реалізує вирази (6) виконаний таким чином, що перший вхід блоку перетворення лінійної напруги 8 підключений до першого входу першого суматора 14, другий вхід якого підключений до третього входу блоку перетворення лінійної напруги 8, який підключено до першого входу третього суматора 16, другий вхід якого підключений до другого входу 8 блоку перетворення лінійної напруги 8, який підключений до першого входу другого суматора 15, другий вхід якого підключений до першого входу блоку перетворення лінійної напруги 8, виходи суматорів підключено до маштабуючих блоків 17,18,19 виходи яких підключено до четвертого, п'ятого та шостого входів блоку визначення електромагнітного моменту 9 Коефіцієнти маштабування блоків 17, 18, 19 мають значення 1/3 Блок визначення електромагнітного моменту 9 реалізований таким чином, що його четвертий вхід підключений до першого входу першого блоку множення 20 другий вхід якого підключений до першого входу блоку визначення миттєвих значень електромагнітного моменту, який підключений до першого входу другого блоку множення 22, другого входу третього блоку множення 24 та через перший маштабуючий блок 21 підключений до другого входу першого суматора 23 і другого входу другого блоку множення 22, вихід першого суматора 21 підключений до першого входу третього блоку множення 24, причому п'ятий вхід блоку визначення миттєвих значень електромагнітного моменту 9 підключений до першого входу четвертого блоку множення 25, другий вхід якого підключений до другого входу блоку визначення миттєвих значень електромагнітного моменту 9, який підключений до першого входу п'ятого блоку множення 27, другого входу шостого блоку множення 29 та через другий маштабуючий блок 26 підключений до другого входу другого суматора 28 і другого входу п'ятого блоку множення 27, вихід другого суматора 28 підключений до першого входу шостого блоку множення 29, причому шостий вхід блоку визначення миттєвих значень електромагнітного моменту 9 підключений до першого входу сьомого блоку множення ЗО, другий вхід якого підключений до третього входу блоку визначення миттєвих значень електромагнітного моменту 9, який підключений до першого входу восьмого блоку множення 32, другого входу дев'ятого блоку множення 34 та через третій маштабуючий блок 31 підключений до другого входу третього суматора 33 і другого входу восьмого блоку множення 32, вихід третього суматора 33 підключений до першого входу дев'ятого блоку множення 34 вихід якого підключений до третього входу четвертого суматора 37 перший і другий входи якого підключені до виходів третього 24 та шостого 29 блоків множення, причому виходи першого 20, четвертого 25 та сьомого ЗО блоків множення підключені до входів п'ятого суматора 35, виходи другого 22, п'ятого 27 та восьмого 32 блоків множення підключені до входів шостого суматора 36, виходи третього 24, шостого 29 та дев'ятого 34 блоків множення підключені до входів четвертого суматора 37, виходи п'ятого 35, шостого 36 та четвертого 37 суматорів підключені до входів сьомого суматора 38, вихід якого підключений до четвертого маштабуючого блоку 39 Коефіцієнти маштабування блоку визначення електромагнітного моменту 9 мають значення маштабуючий блок 21 - активного опору фази статора RA, маштабуючий блок 26 - активного опору фази статора RB, 50115 маштабуючий блок 31 - активного опору фази статора Rc, маштабуючий блок 39 - кутової швидкості поля статора шо У блоку 12 другий вхід від'ємний У блоку 8 перетворення лінійної напруги другі входи блоків 14, 15, 16 ВІД'ЄМНІ 10 У блоку 9 визначення миттєвих значень електромагнітного моменту другі входи блоків 23, 28, 33, 38 В І Д ' Є М Н І Блок визначення електромагнітного моменту 9 може бути реалізований у якості обчислювального пристрою Алгоритм роботи наведено на Фіг 4 11 50115 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71 12
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for diagnostics of an asynchronous motor and a device for realization of the method
Автори англійськоюRodkin Dmytro Yosypovych, Chornyi Oleksii Petrovych, Hladyr Andrii Ivanovych, Lashko Yurii Viktorovych
Назва патенту російськоюСпособ диагностики асинхронного электродвигателя и устройство для осуществления способа
Автори російськоюРодькин Дмитрий Иосифович, Черный Алексей Петрович, Гладыр Андрей Иванович, Лашко Юрий Викторович
МПК / Мітки
МПК: G01R 31/34
Мітки: двигуна, асинхронного, пристрій, здійснення, діагностики, спосіб
Код посилання
<a href="https://ua.patents.su/6-50115-sposib-diagnostiki-asinkhronnogo-dviguna-ta-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб діагностики асинхронного двигуна та пристрій для його здійснення</a>
Спосіб діагностики параметрів асинхронного двигуна з короткозамкненим ротором та пристрій для його здійснення
Номер патенту: 36060
Опубліковано: 16.04.2001
Автори: Вошун Олексій Миколайович, Родькін Дмитро Йосипович, Добрецов Володимир Валентинович, Долженко Віктор Володимирович, Пасмурских Олександр Олексійович, Сисюк Геннадій Юрійович, Луговой Анатолій Васильович, Чорний Олексій Петрович
МПК: G01R 31/34
Мітки: діагностики, ротором, короткозамкненим, двигуна, параметрів, асинхронного, спосіб, здійснення, пристрій
Формула / Реферат:
1. Спосіб діагностики параметрів асинхронного двигуна з короткозамкненим ротором, який полягає в підключенні статорних обмоток до однофазної мережі промислової частоти, вимірюванні напруги, струму та кута зсуву між ними, в відключенні статорних обмоток від мережі в момент переходу струму через нуль, вимірюванні залишкової напруги після відключення, який відрізняється тим, що в момент відключення вимірюють стрибок напруги на затискачах статора...
Пристрій для множення
Номер патенту: 37026
Опубліковано: 16.04.2001
Автори: Білан Степан Миколайович, Кіров Максим Володимирович
МПК: G06G 7/16
Текст:
...схеми керування, другий вихід котрої підключений до другого керуючого входу першого суматора та до другого керуючого входу др угого суматора, а третій вихід схеми керу вання підключений до першого керуючого входу першого суматора та до першого керуючого входу другого суматора, а інформаційній вихід лічильника підключений до першого та другого інформаційного входів першого суматора та до першого та другого інформаційних входів др угого...
Спосіб експрес-діагностики фізіологічного стану біологічного об’єкта та пристрій для його здійснення

Номер патенту: 44944
Опубліковано: 15.03.2002
Автор: Обабков Анатолій Івановіч
МПК: G01N 33/487
Мітки: стану, пристрій, об'єкта, здійснення, експрес-діагностики, біологічного, фізіологічного, спосіб
Формула / Реферат:
1. Спосіб діагностики фізіологічного стану біологічного об'єкта, який включає забір проби біологічної рідини у біологічного об'єкта та розміщення її у комірці (1) для аналізу, пропускання струму через комірку (1) для аналізу з біологічною рідиною від генератора (2), який перестроюється за частотою та амплітудою, і вимірювання провідності Y1 проби біологічної рідини, за якою судять про фізіологічний стан біологічного об'єкта, який...
Спосіб динамічного навантаження двигуна постійного струму незалежного збудження та пристрій для його здійснення
Номер патенту: 40067
Опубліковано: 16.07.2001
Автори: Вошун Олексій Миколайович, Бялобржевський Олексій Володимирович, Родькін Дмитро Йосипович, Пасмурских Олександр Олексійович, Величко Тетяна Володимирівна, Добрецов Володимир Валентинович, Луговий Анатолій Васильович
МПК: G01R 31/34
Мітки: струму, навантаження, здійснення, постійного, незалежного, спосіб, збудження, двигуна, динамічного, пристрій
Формула / Реферат:
1. Спосіб динамічного навантаження двигуна постійного струму незалежного збудження, який полягає в тому, що якір двигуна живиться від регульованого джерела через датчик струму якоря, обмотка збудження живиться від регульованого джерела через датчик струму збудження, контролюються параметри режиму навантаження, струм якоря, напруга якоря, швидкість обертання якоря, який відрізняється тим, що задають залежності струму якоря та кутової швидкості...
Спосіб резервованого підключення джерел інформації та пристрій для його здійснення
Номер патенту: 48549
Опубліковано: 15.08.2002
Автори: Пазюк Олексій Вячеславович, Зеленков Олександр Аврамович, Соченко Петро Степанович
МПК: H05K 10/00
Мітки: джерел, підключення, інформації, резервованого, пристрій, здійснення, спосіб
Формула / Реферат:
1. Спосіб резервованого підключення джерел інформації, при якому використовують паралельно декілька джерел і достовірність інформації забезпечують мажоритарним принципом прийняття рішення, коли більшість із підключених джерел показують наявність контрольованого явища, який відрізняється тим, що збільшення резервних джерел інформації виконують за допомогою вкладуваних модулів, при цьому на першому ступені об'єднують в модуль мале число джерел...
Попередній патент: Система запуску та контролю режимів роботи синхронного двигуна групи г-д
Наступний патент: Спосіб випробування асинхронного трифазного електродвигуна та пристрій для його здійснення
Випадковий патент: Завадозахищена рлс