Курсова система рухомого об`єкта
Номер патенту: 63070
Опубліковано: 26.09.2011
Автори: Лакоза Сергій Леонідович, Корнійчук Валентин Васильович, Мелешко Владислав Валентинович

Формула / Реферат
Курсова система рухомого об'єкта, що містить гіроскопічний чутливий елемент та пристрій перетворення й обробки інформації, яка відрізняється тим, що як гіроскопічний чутливий елемент на борту жорстко встановлений динамічно налагоджуваний гіроскоп, вісь кінетичного моменту якого спрямована по поздовжній осі рухомого об'єкта, а для визначення курсу використовують дані про кутову швидкість об'єкта відносно поперечної та нормальної осей об'єкта, а також кутів крену та тангажу об'єкта.
Текст
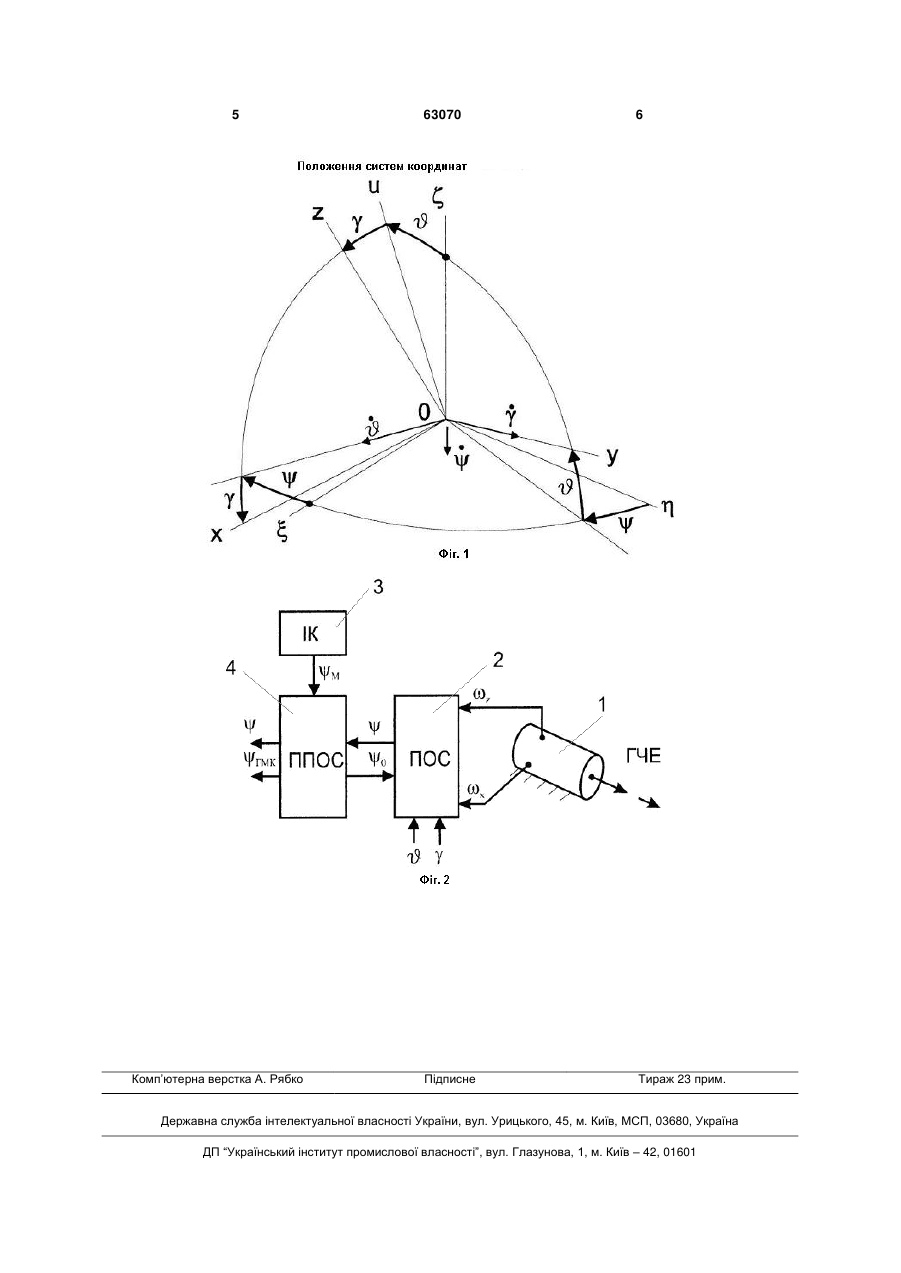
Курсова система рухомого об'єкта, що містить гіроскопічний чутливий елемент та пристрій перетворення й обробки інформації, яка відрізняється тим, що як гіроскопічний чутливий елемент на борту жорстко встановлений динамічно налагоджуваний гіроскоп, вісь кінетичного моменту якого спрямована по поздовжній осі рухомого об'єкта, а для визначення курсу використовують дані про кутову швидкість об'єкта відносно поперечної та нормальної осей об'єкта, а також кутів крену та тангажу об'єкта. (19) (21) u201102538 (22) 03.03.2011 (24) 26.09.2011 (46) 26.09.2011, Бюл.№ 18, 2011 р. (72) МЕЛЕШКО ВЛАДИСЛАВ ВАЛЕНТИНОВИЧ, КОРНІЙЧУК ВАЛЕНТИН ВАСИЛЬОВИЧ, RU, ЛАКОЗА СЕРГІЙ ЛЕОНІДОВИЧ (73) НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ УКРАЇНИ "КИЇВСЬКИЙ ПОЛІТЕХНІЧНИЙ ІНСТИТУТ" 3 63070 ційного компаса 3, пристрою перетворення й обробки сигналів 4, який видає гіромагнітний курс ГМК, а також видає початкове значення курсу при запуску. На Фіг.2 також зображено х, z - вимірювані динамічно налагоджуваним гіроскопом проекції абсолютної кутової швидкості обертання об'єкта відносно поперечної й нормальної осей об'єкта, відповідно. 4 Запропонована курсова система працює наступним чином. Представимо абсолютну кутову швидкість руху об'єкта як суму переносної кутової швидкості (проекції , , ) і відносної кутової швидкості (проекції , , ). Сума проекцій на вісь OU має вигляд: z cos x sin cos sin sin (1) де u cos sin V , R =ucossin, ζ=usin, R - радіус Землі, - шляховий кут ортодромії, V - швидкість руху об'єкта. З Фіг.1 можна отримати співвідношення tg cos sin мо: Використовуючи вирази для , , отримає cos sin u cos 2 1 z cos x sin . (2) cos Після підстановки (2) в (1) запишемо: V sin . R V sin 1 z cos x sin . (3) u sin tg u cos cos 2 R cos З (3) видно, що для визначення кутової швидкості (або після інтегрування кута ) необхідна інформація про складові абсолютної кутової швидкості z, х, про кути тангажу й крену , а також про широту і лінійну швидкість руху V. Для нульових кутів і : u sin z . Ортодромічний курс визначається шляхом інтегрування: t dt 0 . 0 У режимі прямолінійного польоту (=60°, -3 Δ=0,1°=1,74·10 рад; VE=200 м/с, ΔVE=1 м/с; z≈x≈0, 0,1 м/с; 0 , 0,486 1 год c 0,25 4,36 103 рад) одержимо наступне значення похибки, прийнявши її випадковий характер V 2 2 2 2 2 2 0,13 z За час віражу tв=60 с накопичиться похибка Δср=1,14°. Оцінки показують, що в прямолінійному польоті точність системи задовільна, вона може працювати в режимі ГПК, а на віражі накопичується не значна похибка внаслідок похибок вимірювання тангажу або крену. Після віражу потрібна корекція. Точність найближчого аналога в прямолінійному польоті становить від 0,5° до 1º. При використанні звичайного гіроагрегату на базі триступеневого гіроскопа (як у найближчому x год . аналозі) карданова похибка за чверть віражу за тих самих умов може досягти 5°. У режимі гіромагнітного компаса система функціонує звичайним чином по різниці між гірокомпасним курсом ψ і магнітним курсом ψм, вимірюваним індукційним компасом. Початкове значення курсу ψ0 може бути отримано як суму магнітного курсу, вимірюваного магнітним компасом на стоянці об'єкта, і магнітного відмінювання, що вводиться по карті. Можливі користувачі корисної моделі - приладобудівні підприємства. 5 Комп’ютерна верстка А. Рябко 63070 6 Підписне Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюCourse system of a movable object
Автори англійськоюMeleshko Vladyslav Valentynovych, Korniichuk Valentyn Vasyliovych, Lakoza Serhii Leonidovych
Назва патенту російськоюКурсовая система подвижного об'акта
Автори російськоюМелешко Владислав Валентинович, Корнийчук Валентин Васильевич, Лакоза Сергей Леонидович
МПК / Мітки
МПК: G05D 1/00, G01C 19/56
Мітки: рухомого, система, об'єкта, курсова
Код посилання
<a href="https://ua.patents.su/3-63070-kursova-sistema-rukhomogo-obehkta.html" target="_blank" rel="follow" title="База патентів України">Курсова система рухомого об`єкта</a>
Система орієнтації рухомого об”єкта
Номер патенту: 47791
Опубліковано: 15.07.2002
Автор: Снігур Анатолій Кирилович
МПК: G01C 21/00
Мітки: орієнтації, об'єкта, рухомого, система
Формула / Реферат:
1. Система орієнтації рухомого об'єкта, що містить датчики кутової швидкості, осі чутливості яких розміщені в ортогональній системі координат, і обчислювальну машину, яка відрізняється тим, що осі чутливості датчиків збігаються з твірною конуса, при цьому вісь останнього сполучена з однією з геометричних осей прямування об'єкта.2. Система за п. 1, яка відрізняється тим, що осі чутливості датчиків розподілені рівномірно по поверхні...
Система для визначення координат та швидкості рухомого об’єкта
Номер патенту: 69200
Опубліковано: 16.08.2004
Автори: Машков Олег Альбертович, Савченко Віталій Анатолійович, Кравченко Юрій Васильович, Мосов Сергій Петрович
МПК: G01S 5/02
Мітки: координат, швидкості, рухомого, система, визначення, об'єкта
Формула / Реферат:
Система для визначення координат та швидкості рухомого об'єкта, що містить приймач радіонавігаційних сигналів, встановлений на рухомому об'єкті, та мережу випромінювачів радіонавігаційних сигналів, встановлених на навігаційних космічних апаратах, яка відрізняється тим, що система додатково містить радіонавігаційну станцію, встановлену на літальному апараті, яка включає приймач, блок обробки та випромінювач радіонавігаційних сигналів.
Система відображення місцезнаходження рухомого об`єкта
Номер патенту: 36559
Опубліковано: 27.10.2008
Автори: Дергачов Костянтин Юрійович, Бандура Іван Миколайович, Шишова Наталія Олександрівна
МПК: G01S 3/02
Мітки: система, об'єкта, рухомого, відображення, місцезнаходження
Формула / Реферат:
Система відображення місцезнаходження рухомого об'єкта, що містить передавач і приймач, які розміщені на рухомому об'єкті, джерело живлення, вихід якого послідовно через підсистему стабілізації живлення та пристрій індикації та зв'язку з персональним комп'ютером з'єднаний з центральною станцією, яка відрізняється тим, що в додатково введені глобальна супутникова система, вхід якої з'єднаний з виходом передавача, а вихід з'єднаний з приймачем,...
Система керування місцезнаходженням рухомого об’єкта
Номер патенту: 55409
Опубліковано: 10.12.2010
Автори: Гуш Роман Миколайович, Кулік Анатолій Степанович, Дергачов Костянтин Юрійович, Кописов Олег Едуардович
МПК: G08G 1/0968
Мітки: система, рухомого, керування, об'єкта, місцезнаходженням
Формула / Реферат:
Система керування місцезнаходженням рухомого об'єкта, що містить глобальну супутникову систему, перший вхід якої з'єднаний з виходом передавача, а перший вихід з'єднаний з приймачем, керуючий контролер, вхід якого з'єднаний з приймачем, а виходи з'єднані з енергонезалежним зберігачем інформації та пристроєм індикації та зв'язку з персональним комп'ютером, джерело живлення, вихід якого через підсистему стабілізації живлення з'єднаний з...
Система автоматичного виявлення місцезнаходження рухомого об’єкта
Номер патенту: 55408
Опубліковано: 10.12.2010
Автори: Дергачов Костянтин Юрійович, Кулік Анатолій Степанович, Сосницький Віталій Валерійович
МПК: G01S 3/02
Мітки: місцезнаходження, система, виявлення, автоматичного, рухомого, об'єкта
Формула / Реферат:
Система автоматичного виявлення місцезнаходження рухомого об'єкта, яка містить глобальну супутникову систему, вхід якої з'єднаний з виходом передавача, а вихід з'єднаний з приймачем, передавач розміщений на рухомому об'єкті, керуючий контролер, вхід якого з'єднаний з виходом приймача, а вихід з входом енергонезалежного зберігача інформації, систему стабілізації живлення, вхід якої з'єднаний з виходом джерела живлення та акумулятором, а вихід...
Попередній патент: Спосіб обробки радіографічних плівок
Наступний патент: Спосіб магнітного очищення рідини
Випадковий патент: Кристалічна форма вільної основи бендамустину (варіанти) та фармацевтична композиція для лікування раку (варіанти)