Система орієнтації рухомого об”єкта
Формула / Реферат
1. Система орієнтації рухомого об'єкта, що містить датчики кутової швидкості, осі чутливості яких розміщені в ортогональній системі координат, і обчислювальну машину, яка відрізняється тим, що осі чутливості датчиків збігаються з твірною конуса, при цьому вісь останнього сполучена з однією з геометричних осей прямування об'єкта.
2. Система за п. 1, яка відрізняється тим, що осі чутливості датчиків розподілені рівномірно по поверхні віртуального конуса.
Текст
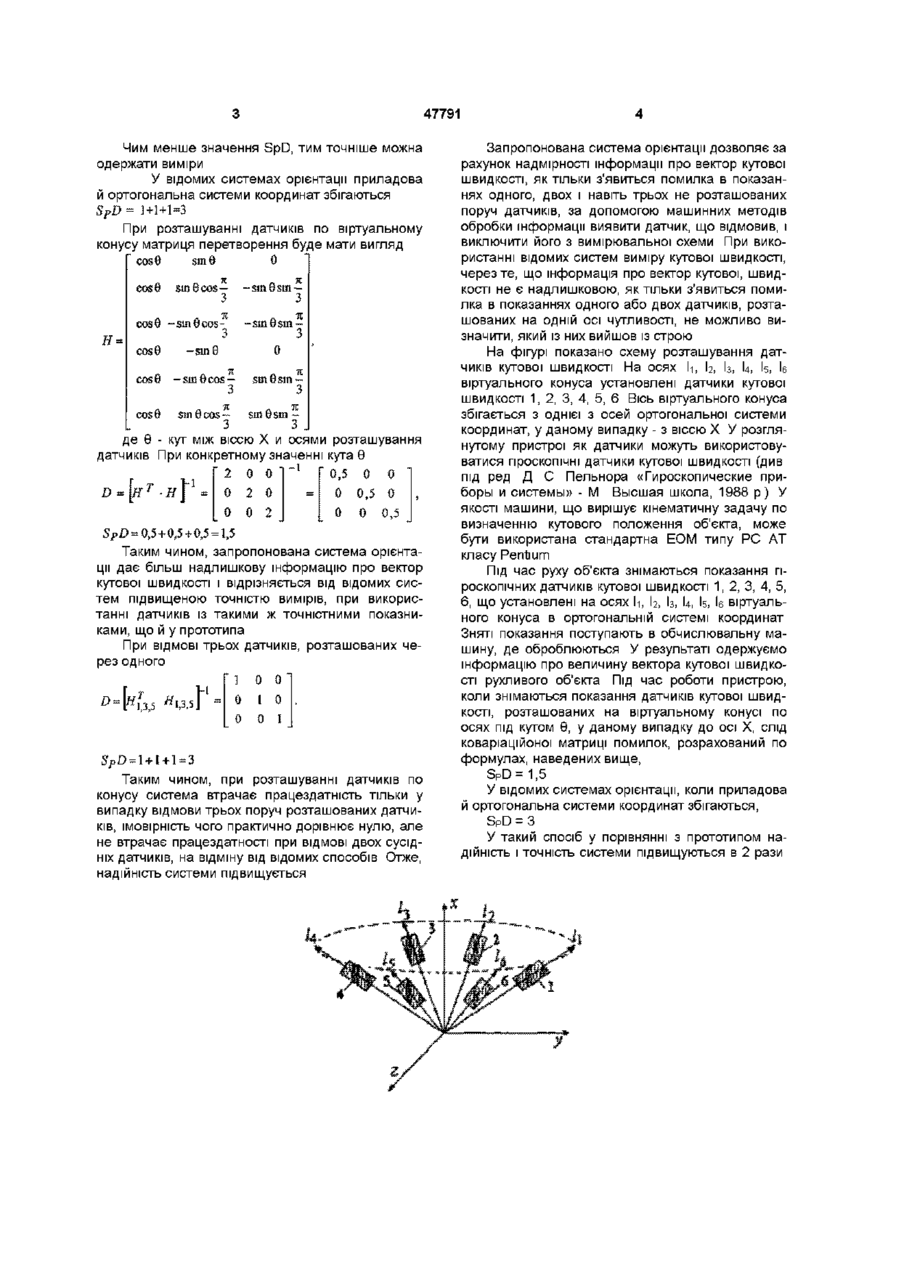
1 Система орієнтації рухомого об'єісга, що містить датчики кутової швидкості, осі чутливості яких розміщені в ортогональній системі координат, і обчислювальну машину, яка відрізняється тим, що осі чутливості датчиків збігаються з твірною конуса, при цьому вісь останнього сполучена з однією з геометричних осей прямування об'єкта 2 Система за п 1, яка відрізняється тим, що осі чутливості датчиків розподілені рівномірно по поверхні віртуального конуса Винахід відноситься до пристрою виміру вектора кутової швидкості рухливого об'єкта, використовуваному в машинобудуванні, суднобудуванні, авіабудуванні, ракетобудуванні й ш Відомо про бескарданну систему орієнтації, що містить три датчика первинної інформації про кутове положення рухливого об'єкта, установлених безпосередньо на його корпусі, і бортової обчислювальної машини, що вирішує кінематичну задачу по визначенню кутового положення об'єкта Датчиками первинної інформації є три датчики кутової швидкості , осі чутливості яких утворюють прямокутну систему координат (див Е Р Рихтенко «Гироскопические системы ориентации» - М «Машиностроение», 1989 р - С 12-14) Однак у таких систем вихід із строю одного з датчиків позбавляє систему працездатності і точність системи (при зберіганні такої ж КІЛЬКОСТІ датчиків) Поставлена задача вирішується тим, що в системі орієнтації рухливого об'єкта, що містить датчики кутової швидкості, осі чутливості яких розміщені в ортогональній системі координат, і обчислювальну машину, ВІДПОВІДНО до винаходу осі чутливості датчиків збігаються з утворюючого конуса, вісь якого сполучена з однією з геометричних осей прямування об'єкта При цьому осі чутливості датчиків розподілені рівномірно по поверхні віртуального конуса Система орієнтації, у якій вимірники розташовуються по конусу, передбачає перетворення інформації, що утворюється в приладовій системі координат, до ортогональної системи координат, що збігається з геометричними осями прямування об'єкта Таке перетворення необхідне, тому що без нього неможливо здійснювати керування рухливим об'єктом Матриця направляючих косинусів між вимірювальною приладовою й ортогональною системою координат є матрицею перетворення з однієї системи координат у іншу Коваріаційна матриця помилок для такої матриці має вид Найбільш близьким до пристрою, що заявляється, за ефектом, який досягається, є бесплатформенні системи орієнтації із надлишковою КІЛЬКІСТЮ датчиків (чотири, шість і більш), розташованих також на трьох перпендикулярних осях Це дозволяє збільшити точність і надійність одержання інформації про параметри прямування об'єкта, (див під ред Д С Пельнора «Гироскопические приборы и системы» - М Висшая школа, 1988 р - С 316 - 318) Така система зберігає працездатність навіть при виході зі строю трьох датчиків, але у випадку, якщо по кожній вимірювальній осі виходить із строю тільки один датчик У основу винаходу поставлено задачу удосконалення системи орієнтації рухливого об'єкта, у якій розташування датчиків кутової швидкості здійснюють таким способом, щоб підвищити надійність D= де D - коваріаційна матриця помилок, Н т - транспонована матриця Н, Н - матриця перетворення Слід коваріаційної матриці помилок де dїї - діагональні елементи матриці о> 47791 Чим менше значення SpD, тим точніше можна одержати виміри У відомих системах орієнтації приладова й ортогональна системи координат збігаються SPD= 1+1+1=3 При розташуванні датчиків по віртуальному конусу матриця перетворення буде мати вигляд cos0 sin 8 0 sinBcos3 -япвяп Я cos 8 ~ sin 8 cos -smSsin % cos 8 н = cos 8 3 3 -sin8 cos В -smScos3 0 sinBsm ж 3 eos 8 sm 0 cos — sm 8 sm 3 3 де Э - кут між віссю X и осями розташування датчиків При конкретному значенні кута Э 0,5 0 0 2 0 0 т 0 0,5 0 0 2 0 D \н -н V 0 0 0,5 0 0 2 0,5 + 0,5+0,5 = 1,5 Таким чином, запропонована система орієнтації дає більш надлишкову інформацію про вектор кутової швидкості і відрізняється від відомих систем підвищеною точністю вимірів, при використанні датчиків із такими ж точністними показниками, що й у прототипа При ВІДМОВІ трьох датчиків, розташованих через одного 1 0 0" 0 І 0 0 0 1 Таким чином, при розташуванні датчиків по конусу система втрачає працездатність тільки у випадку відмови трьох поруч розташованих датчиків, імовірність чого практично дорівнює нулю, але не втрачає працездатності при ВІДМОВІ ДВОХ сусідніх датчиків, на відміну від відомих способів Отже, надійність системи підвищується Запропонована система орієнтації дозволяє за рахунок надмірності інформації про вектор кутової швидкості, як тільки з'явиться помилка в показаннях одного, двох і навіть трьох не розташованих поруч датчиків, за допомогою машинних методів обробки інформації виявити датчик, що відмовив, і виключити його з вимірювальної схеми При використанні відомих систем виміру кутової швидкості, через те, що інформація про вектор кутової, швидкості не є надлишковою, як тільки з'явиться помилка в показаннях одного або двох датчиків, розташованих на одній осі чутливості, не можливо визначити, який із них вийшов із строю На фігурі показано схему розташування датчиків кутової швидкості На осях h, Ь, Із, U, k, k віртуального конуса установлені датчики кутової швидкості 1, 2, 3, 4, 5, 6 Вісь віртуального конуса збігається з однієї з осей ортогональної системи координат, у даному випадку - з віссю X У розглянутому пристрої як датчики можуть використовуватися гіроскопічні датчики кутової швидкості (див під ред Д С Пельнора «Гироскопические приборы и системы» - М Высшая школа, 1988 р) У якості машини, що вирішує кінематичну задачу по визначенню кутового положення об'єкта, може бути використана стандартна ЕОМ типу PC AT класу Pentium Під час руху об'єкта знімаються показання гіроскопічних датчиків кутової швидкості 1, 2, 3, 4, 5, 6, що установлені на осях h, Ь, Із, U, k, Іє віртуального конуса в ортогональній системі координат Зняті показання поступають в обчислювальну машину, де оброблюються У результаті одержуємо інформацію про величину вектора кутової швидкості рухливого об'єкта Під час роботи пристрою, коли знімаються показання датчиків кутової швидкості, розташованих на віртуальному конусі по осях під кутом Э, у даному випадку до осі X, слід коваріаційоної матриці помилок, розрахований по формулах, наведених вище, S P D= 1,5 У відомих системах орієнтації, коли приладова й ортогональна системи координат збігаються, SPD = 3 У такий спосіб у порівнянні з прототипом надійність і точність системи підвищуються в 2 рази 47791 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна (044) 456 - 20 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for a movable object orientation
Автори англійськоюSnihur Anatolii Kyrylovych
Назва патенту російськоюСистема ориентации подвижного объекта
Автори російськоюСнигур Анатолий Кириллович
МПК / Мітки
МПК: G01C 21/00
Мітки: об'єкта, система, орієнтації, рухомого
Код посилання
<a href="https://ua.patents.su/3-47791-sistema-oriehntaci-rukhomogo-obehkta.html" target="_blank" rel="follow" title="База патентів України">Система орієнтації рухомого об”єкта</a>
Спосіб визначення кутової орієнтації об’єкта
Номер патенту: 36404
Опубліковано: 16.04.2001
Автори: Збруцький Олександр Васильович, Нестеренко Олег Іванович, Маринич Юрій Михайлович
МПК: G01C 19/00
Мітки: об'єкта, визначення, орієнтації, спосіб, кутової
Текст:
...і перпендикулярні головній осі гіроскопа, по кутам відхилення об'єкта відносно головної осі гіроскопа визначають кути і тангажу об'єкта, згідно з винаходом вводиться те, що додатково вимірюють управляючі моменти гіроскопа та визначають кут курсу за формулою: (19) UA (11) 36404 (13) A де K – кут к урсу об'єкта; M y1, M y 2 – управляючі моменти гіроскопа. 36404 K = arctg M y1 M y2 взаємоортогональних площинах у напрямку до...
Спосіб визначення орієнтації осі свердловини

Номер патенту: 30032
Опубліковано: 15.11.2000
Автори: Гусєв Олексій Володимирович, Рудик Юрій Микитович, Анупрієнко Генадій Єфремович, Карпачов Юрій Андрійович
МПК: E21B 47/00, G01C 9/00, E21B 47/02
Мітки: осі, спосіб, орієнтації, визначення, свердловини
Формула / Реферат:
1. Спосіб визначення орієнтації осі свердловини, який містить операції вимірювання проекцій вектора сили тяжіння та проекцій вектора абсолютної кутової швидкості обертання Землі на ортогональні осі системи координат гіроскопічного інклінометра, розташованного в свердловині, який відрізняється тим, що на поверхні свердловини вибирають систему координат oxyz, де вісь oz спрямована по вертикалі Землі, а в площині yoz розташований вектор
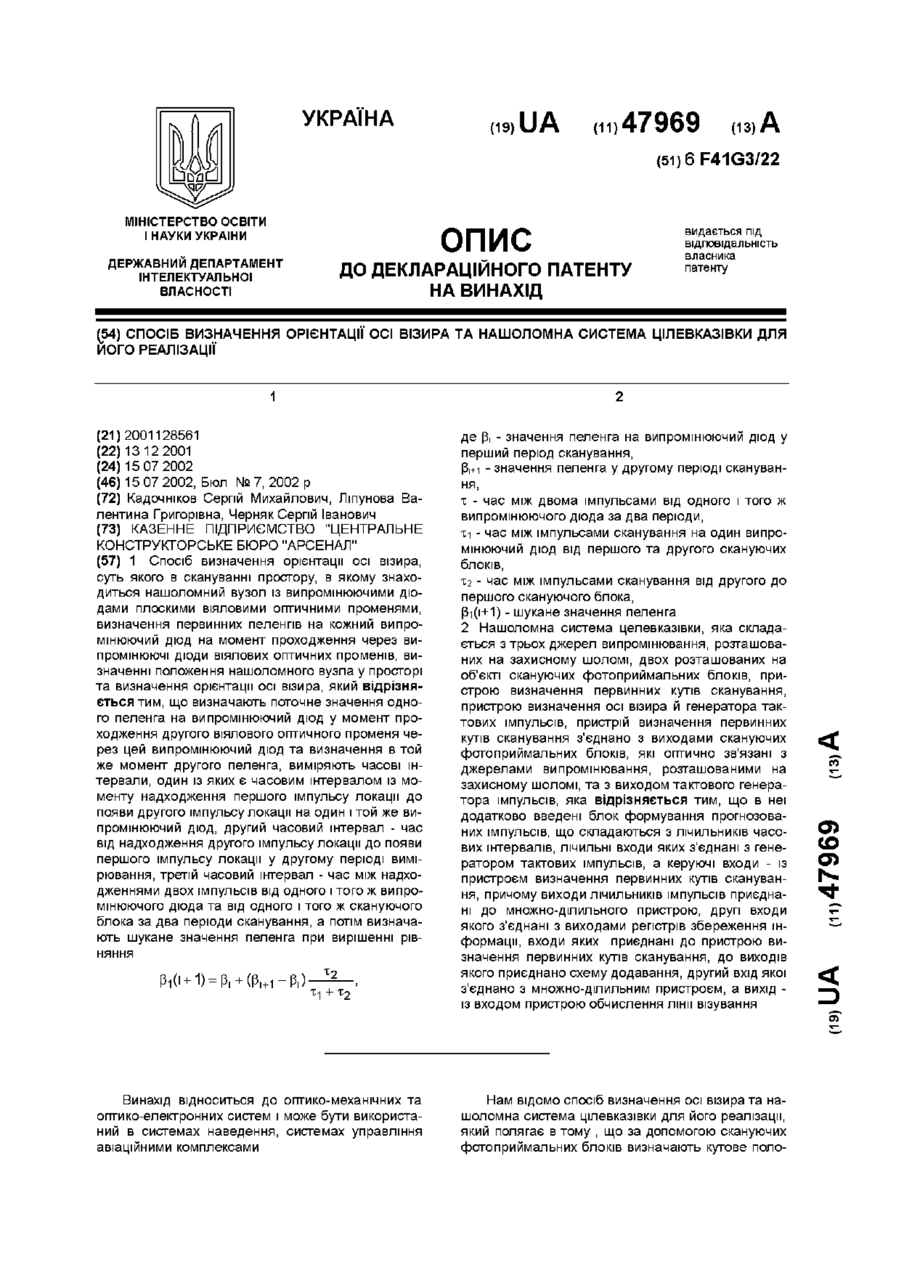
Спосіб визначення орієнтації осі візира та нашоломна система цілевказівки для його реалізації
Номер патенту: 47969
Опубліковано: 15.07.2002
Автори: Кадочніков Сергій Михайлович, Черняк Сергій Іванович, Ліпунова Валентина Григорівна
МПК: F41G 3/22
Мітки: спосіб, орієнтації, цілевказівки, визначення, візира, система, нашоломна, осі, реалізації
Формула / Реферат:
1. Спосіб визначення орієнтації осі візира, суть якого полягає в скануванні простору, в якому знаходиться нашоломний вузол із випромінюючими діодами, плоскими віяловими оптичними променями, визначенні первинних пеленгів на кожний випромінюючий діод на момент проходження через випромінюючі діоди віялових оптичних променів, визначенні положення нашоломного вузла у просторі та визначенні орієнтації осі візира, який відрізняється тим, що...
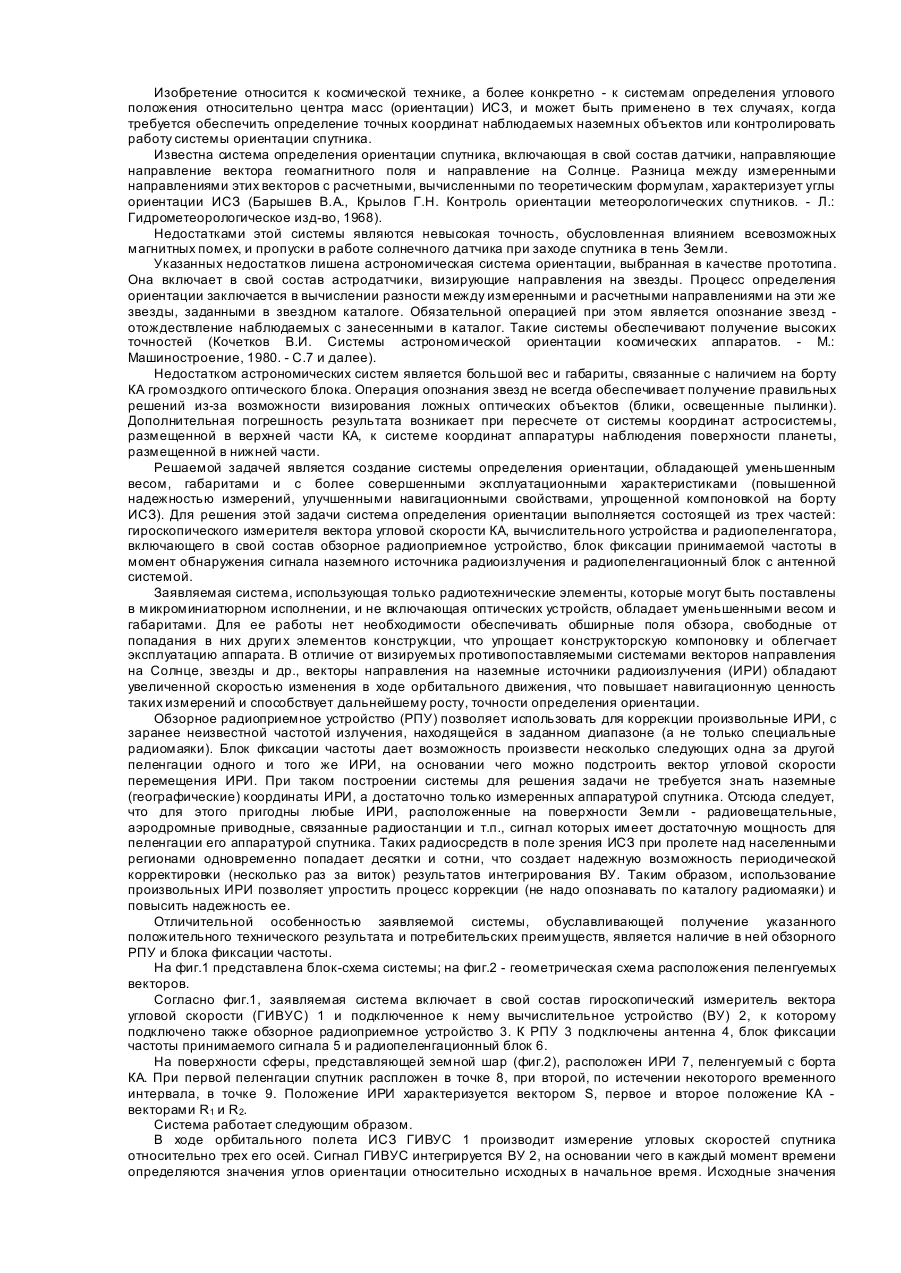
Система визначення орієнтації штучного супутника землі
Номер патенту: 21768
Опубліковано: 30.04.1998
Автори: П'ятак Ігор Авдійович, Салтиков Юрій Дмитрович
МПК: G01C 21/24, G01S 5/02
Мітки: супутника, орієнтації, землі, система, визначення, штучного
Формула / Реферат:
1. Система определения ориентации искусственного спутника Земли, состоящая из гироскопического блока измерителя угловой скорости спутника, вычислительного устройства и радиопеленгатора, включающего радиопеленгационный блок с антенной системой, отличающаяся тем, что в состав радиопеленгатора входят обзорное радиоприемное устройство и блок фиксации частоты принимаемого сигнала.2. Система определения ориентации, выполненная в...
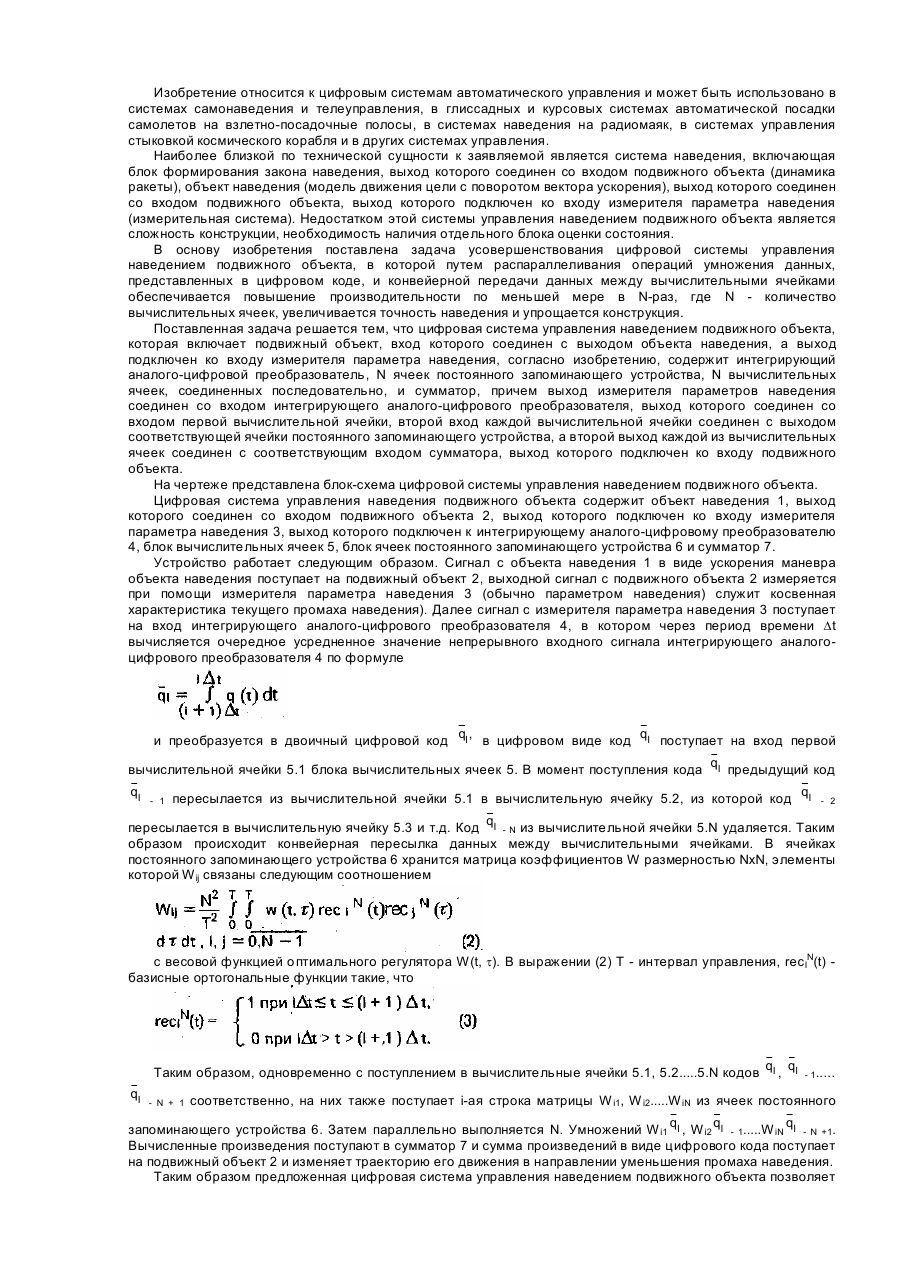
Цифрова система управління наведенням рухомого об’єкта
Номер патенту: 10677
Опубліковано: 25.12.1996
Автори: Сокол Сергій Олексійович, Тунік Анатолій Азарійович
МПК: G05B 11/00
Мітки: об'єкта, наведенням, рухомого, цифрова, система, управління
Формула / Реферат:
Цифровая система управления наведением подвижного объекта, включающая подвижный объект, вход которого соединен с выходом объекта наведения, а выход подключен ко входу измерителя параметра наведения, отличающаяся тем, что она содержит интегрирующий аналого-цифровой преобразователь, N ячеек постоянного запоминающего устройства, N вычислительных ячеек, соединенных последовательно, и сумматор, причем выход измерителя параметра наведения...
Попередній патент: Спосіб відновлення робочої поверхні колеса рейкового транспорту
Наступний патент: Магніторідинний герметизатор
Випадковий патент: Спосіб плазмового напилення