Система керування місцезнаходженням рухомого об’єкта
Номер патенту: 55409
Опубліковано: 10.12.2010
Автори: Кулік Анатолій Степанович, Гуш Роман Миколайович, Кописов Олег Едуардович, Дергачов Костянтин Юрійович
Формула / Реферат
Система керування місцезнаходженням рухомого об'єкта, що містить глобальну супутникову систему, перший вхід якої з'єднаний з виходом передавача, а перший вихід з'єднаний з приймачем, керуючий контролер, вхід якого з'єднаний з приймачем, а виходи з'єднані з енергонезалежним зберігачем інформації та пристроєм індикації та зв'язку з персональним комп'ютером, джерело живлення, вихід якого через підсистему стабілізації живлення з'єднаний з пристроєм індикації та зв'язку з персональним комп'ютером, вбудовані акумулятори, входи і виходи яких з'єднані з підсистемою стабілізації живлення, а також центральну станцію, входи і виходи якої з'єднані з пристроєм індикації та зв'язку з персональним комп'ютером, яка відрізняється тим, що в систему введений додатковий передавач, вхід якого з'єднаний з керуючим контролером, а вихід з'єднаний з другим входом глобальної супутникової системи, додатковий приймач, розміщений на рухомому об'єкті, вхід якого з'єднаний з другим виходом глобальної супутникової системи, контролер, вхід якого з'єднаний з додатковим приймачем, а вихід з'єднаний з пристроєм індикації, та акумулятори, виходи яких з'єднані з другим входом контролера, пристроєм індикації, передавачем та додатковим приймачем.
Текст
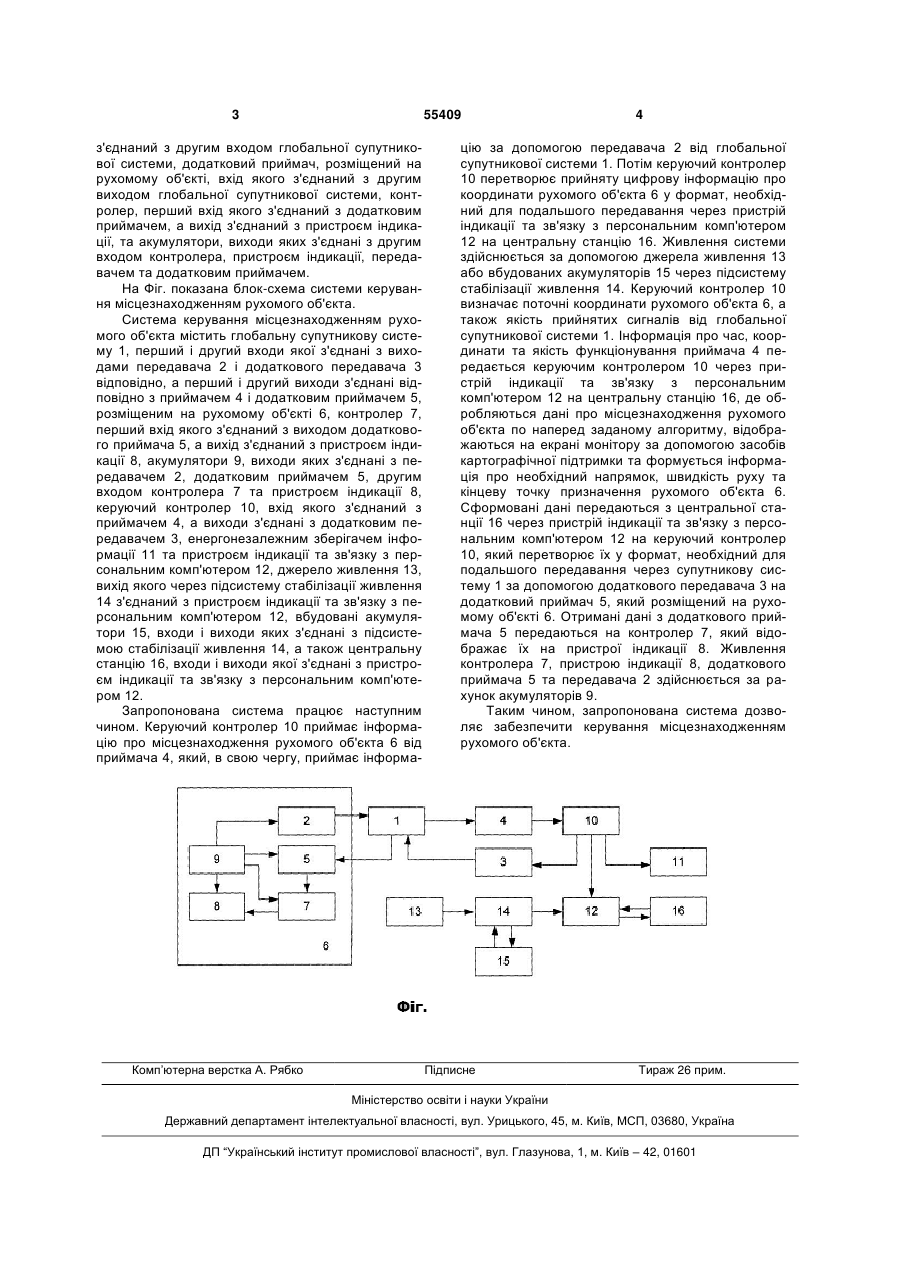
Система керування місцезнаходженням рухомого об'єкта, що містить глобальну супутникову систему, перший вхід якої з'єднаний з виходом передавача, а перший вихід з'єднаний з приймачем, керуючий контролер, вхід якого з'єднаний з приймачем, а виходи з'єднані з енергонезалежним зберігачем інформації та пристроєм індикації та зв'язку з персональним комп'ютером, джерело 3 55409 з'єднаний з другим входом глобальної супутникової системи, додатковий приймач, розміщений на рухомому об'єкті, вхід якого з'єднаний з другим виходом глобальної супутникової системи, контролер, перший вхід якого з'єднаний з додатковим приймачем, а вихід з'єднаний з пристроєм індикації, та акумулятори, виходи яких з'єднані з другим входом контролера, пристроєм індикації, передавачем та додатковим приймачем. На Фіг. показана блок-схема системи керування місцезнаходженням рухомого об'єкта. Система керування місцезнаходженням рухомого об'єкта містить глобальну супутникову систему 1, перший і другий входи якої з'єднані з виходами передавача 2 і додаткового передавача 3 відповідно, а перший і другий виходи з'єднані відповідно з приймачем 4 і додатковим приймачем 5, розміщеним на рухомому об'єкті 6, контролер 7, перший вхід якого з'єднаний з виходом додаткового приймача 5, а вихід з'єднаний з пристроєм індикації 8, акумулятори 9, виходи яких з'єднані з передавачем 2, додатковим приймачем 5, другим входом контролера 7 та пристроєм індикації 8, керуючий контролер 10, вхід якого з'єднаний з приймачем 4, а виходи з'єднані з додатковим передавачем 3, енергонезалежним зберігачем інформації 11 та пристроєм індикації та зв'язку з персональним комп'ютером 12, джерело живлення 13, вихід якого через підсистему стабілізації живлення 14 з'єднаний з пристроєм індикації та зв'язку з персональним комп'ютером 12, вбудовані акумулятори 15, входи і виходи яких з'єднані з підсистемою стабілізації живлення 14, а також центральну станцію 16, входи і виходи якої з'єднані з пристроєм індикації та зв'язку з персональним комп'ютером 12. Запропонована система працює наступним чином. Керуючий контролер 10 приймає інформацію про місцезнаходження рухомого об'єкта 6 від приймача 4, який, в свою чергу, приймає інформа Комп’ютерна верстка А. Рябко 4 цію за допомогою передавача 2 від глобальної супутникової системи 1. Потім керуючий контролер 10 перетворює прийняту цифрову інформацію про координати рухомого об'єкта 6 у формат, необхідний для подальшого передавання через пристрій індикації та зв'язку з персональним комп'ютером 12 на центральну станцію 16. Живлення системи здійснюється за допомогою джерела живлення 13 або вбудованих акумуляторів 15 через підсистему стабілізації живлення 14. Керуючий контролер 10 визначає поточні координати рухомого об'єкта 6, а також якість прийнятих сигналів від глобальної супутникової системи 1. Інформація про час, координати та якість функціонування приймача 4 передається керуючим контролером 10 через пристрій індикації та зв'язку з персональним комп'ютером 12 на центральну станцію 16, де обробляються дані про місцезнаходження рухомого об'єкта по наперед заданому алгоритму, відображаються на екрані монітору за допомогою засобів картографічної підтримки та формується інформація про необхідний напрямок, швидкість руху та кінцеву точку призначення рухомого об'єкта 6. Сформовані дані передаються з центральної станції 16 через пристрій індикації та зв'язку з персональним комп'ютером 12 на керуючий контролер 10, який перетворює їх у формат, необхідний для подальшого передавання через супутникову систему 1 за допомогою додаткового передавача 3 на додатковий приймач 5, який розміщений на рухомому об'єкті 6. Отримані дані з додаткового приймача 5 передаються на контролер 7, який відображає їх на пристрої індикації 8. Живлення контролера 7, пристрою індикації 8, додаткового приймача 5 та передавача 2 здійснюється за рахунок акумуляторів 9. Таким чином, запропонована система дозволяє забезпечити керування місцезнаходженням рухомого об'єкта. Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюControl system for location of a mobile object
Автори англійськоюKulik Anatolii Stepanovych, Derhachov Kostiantyn Yuriiovych, Kopysov Oleh Eduardovych, Husch Roman Mykolaiovych
Назва патенту російськоюСистема управления местонахождением подвижного объекта
Автори російськоюКулик Анатолий Степанович, Дергачов Константин Юрьевич, Кописов Олег Эдуардович, Гущ Роман Николаевич
МПК / Мітки
МПК: G08G 1/0968
Мітки: система, об'єкта, місцезнаходженням, керування, рухомого
Код посилання
<a href="https://ua.patents.su/2-55409-sistema-keruvannya-misceznakhodzhennyam-rukhomogo-obehkta.html" target="_blank" rel="follow" title="База патентів України">Система керування місцезнаходженням рухомого об’єкта</a>
Система відображення місцезнаходження рухомого об`єкта
Номер патенту: 36559
Опубліковано: 27.10.2008
Автори: Дергачов Костянтин Юрійович, Бандура Іван Миколайович, Шишова Наталія Олександрівна
МПК: G01S 3/02
Мітки: місцезнаходження, об'єкта, система, рухомого, відображення
Формула / Реферат:
Система відображення місцезнаходження рухомого об'єкта, що містить передавач і приймач, які розміщені на рухомому об'єкті, джерело живлення, вихід якого послідовно через підсистему стабілізації живлення та пристрій індикації та зв'язку з персональним комп'ютером з'єднаний з центральною станцією, яка відрізняється тим, що в додатково введені глобальна супутникова система, вхід якої з'єднаний з виходом передавача, а вихід з'єднаний з приймачем,...
Система автоматичного виявлення місцезнаходження рухомого об’єкта
Номер патенту: 55408
Опубліковано: 10.12.2010
Автори: Дергачов Костянтин Юрійович, Кулік Анатолій Степанович, Сосницький Віталій Валерійович
МПК: G01S 3/02
Мітки: місцезнаходження, система, автоматичного, об'єкта, рухомого, виявлення
Формула / Реферат:
Система автоматичного виявлення місцезнаходження рухомого об'єкта, яка містить глобальну супутникову систему, вхід якої з'єднаний з виходом передавача, а вихід з'єднаний з приймачем, передавач розміщений на рухомому об'єкті, керуючий контролер, вхід якого з'єднаний з виходом приймача, а вихід з входом енергонезалежного зберігача інформації, систему стабілізації живлення, вхід якої з'єднаний з виходом джерела живлення та акумулятором, а вихід...
Система визначення маршруту руху транспортного об’єкта
Номер патенту: 45148
Опубліковано: 26.10.2009
Автори: Дорош Ігор Сергійович, Дергачев Костянтин Юрійович, Бандура Іван Миколайович
МПК: G01S 3/02
Мітки: транспортного, руху, об'єкта, маршруту, система, визначення
Формула / Реферат:
Система визначення маршруту руху транспортного об'єкта, яка містить приймач, зв'язаний із глобальною супутниковою системою та керуючим контролером, джерело живлення, вихід якого послідовно через підсистему стабілізації живлення та пристрій індикації з персональним комп'ютером з'єднаний з центральною станцією, вбудовані акумулятори, входи і виходи яких з'єднані з підсистемою стабілізації живлення, керуючий контролер, входи і виходи якого...
Система автоматизованого керування й контролю вагона-автомобілевоза

Номер патенту: 37007
Опубліковано: 10.11.2008
Автори: Зибін Віктор Георгійович, Рачок Микола Миколайович, Бандура Іван Миколайович, Макаренко Валентин Миколайович
МПК: H02B 15/00
Мітки: система, керування, вагона-автомобілевоза, автоматизованого, контролю
Формула / Реферат:
Система автоматизованого керування й контролю вагона-автомобілевоза, яка відрізняється тим, що в неї уведені система пожежної сигналізації й блок керування й контролю, що містить джерело живлення, обмежник напруги, перший вихід якого з'єднаний з першим входом блока комутації, а другий його вихід з'єднаний із входом системи контролю нагрівання букс, контролер, перший вихід якого з'єднаний із другим входом блока комутації, а другий його вихід...
Система позиціювання персоналу і рухомого обладнання для гірничих підприємств
Номер патенту: 49993
Опубліковано: 25.05.2010
Автори: Шевченко Олександр Григорович, Василенко Олександр В'ячеславович, Ревякін Володимир Іванович
МПК: G08C 19/16, E21C 35/24
Мітки: підприємств, система, гірничих, обладнання, персоналу, рухомого, позиціювання
Формула / Реферат:
Система позиціювання персоналу і рухомого обладнання для гірничих підприємств, що складається із сервера, з'єднаного через адаптер перетворення інтерфейсу RS-232 в інтерфейс RS-485 із першим входом-виходом першого стаціонарного зчитувача, що включає до себе приймач, вхід якого підключений до антени, а вихід - до першого входу контролера, другий вхід і перший вихід останнього з'єднані із запам'ятовуючим пристроєм, третій вхід і другий вихід...
Попередній патент: Система автоматичного виявлення місцезнаходження рухомого об’єкта
Наступний патент: Система керування безпілотним літальним апаратом
Випадковий патент: Спосіб інтенсивної терапії внутрішньочерепної гіпертензії у дітей з нейроінфекціями