Пристрій наведення керованих об’єктів при перехопленні вільноманевруючих цілей
Номер патенту: 64728
Опубліковано: 10.11.2011
Автори: Хомік Микола Миколайович, Куровська Тетяна Юріївна, Щипанський Павло Володимирович, Слєпов Лев Іванович, Герасименко Володимир Вікторович
Формула / Реферат
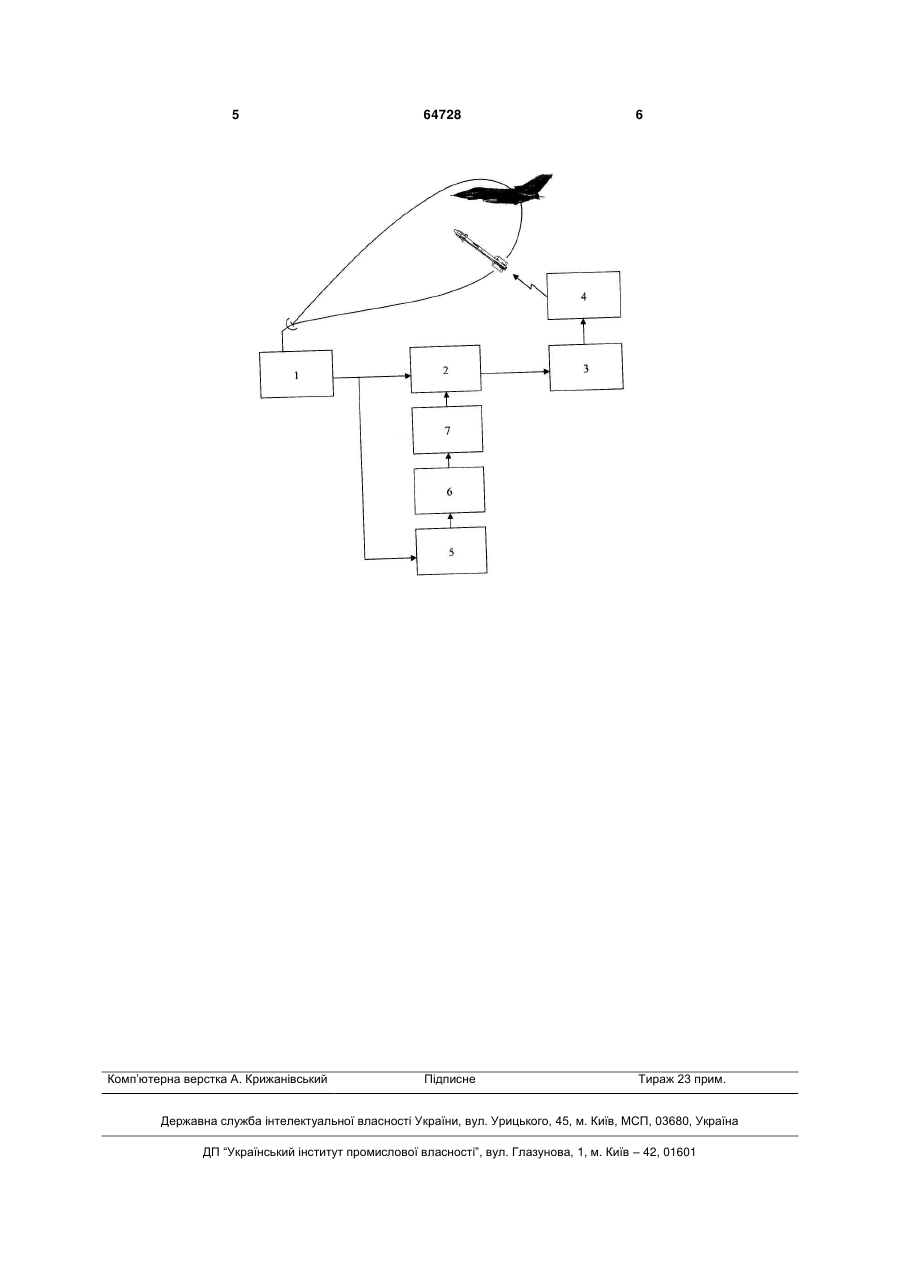
Пристрій наведення керованих об'єктів при перехопленні вільноманевруючих цілей, який містить пристрій вимірювання координат цілі та координат керованого об'єкта, пристрій формування команд керування, систему керування органами управління керованого об'єкта, командну радіолінію керування, пристрій аналізу параметрів руху керованого об'єкта, при цьому пристрій вимірювання координат цілі та координат керованого об'єкта з'єднаний з пристроєм формування команд керування, вихід якого з'єднаний з системою керування органами управління керованого об'єкта, яка, в свою чергу, з'єднана з командною радіолінією керування, пристрій вимірювання координат цілі та координат керованого об'єкта з'єднаний з пристроєм аналізу параметрів руху керованого об'єкта, який відрізняється тим, що додатково запроваджені пристрій обчислення кута напрямку відстані між об'єктом і ціллю та пристрій утримання зміненого курсу (його поточного значення), пристрій аналізу параметрів руху керованого об'єкта з'єднаний з пристроєм обчислення кута напрямку відстані між об'єктом і ціллю, вихід якого з'єднаний з пристроєм утримання зміненого курсу (його поточного значення), що з'єднаний з пристроєм формування команд керування.
Текст
Пристрій наведення керованих об'єктів при перехопленні вільноманевруючих цілей, який містить пристрій вимірювання координат цілі та координат керованого об'єкта, пристрій формування команд керування, систему керування органами управління керованого об'єкта, командну радіолінію керування, пристрій аналізу параметрів руху керованого об'єкта, при цьому пристрій вимірю 3 В основу корисної моделі покладене завдання шляхом досягнення максимально ефективної траєкторії об'єкта забезпечити мінімізацію витрати часу на перехоплення цілі. Суть корисної моделі у пристрої наведення керованих об'єктів при перехопленні вільноманевруючих цілей, що містить пристрій вимірювання координат цілі та координат керованого об'єкта, пристрій формування команд керування, систему керування органами управління керованого об'єкта, командну радіолінію керування, пристрій аналізу параметрів руху керованого об'єкта, пристрій обчислення кута напрямку відстані між об'єктом і ціллю, пристрій утримання зміненого курсу (його поточного значення). Порівняльний аналіз технічного рішення із прототипом дозволяє зробити висновок, що пристрій наведення керованих об'єктів при перехопленні вільноманевруючих цілей, який заявляється, відрізняється тим, що до нього додатково запроваджені пристрій обчислення кута напрямку відстані між об'єктом і ціллю і пристрій утримання зміненого курсу (його поточного значення). Суть корисної моделі пояснюється за допомогою креслень, де на фіг. 1 представлена функціональна схема пристрою наведення керованих об'єктів при перехопленні вільноманевруючих цілей Пристрій наведення керованих об'єктів при перехопленні вільноманевруючих цілей конструктивно містить (див. фіг.1) пристрій вимірювання координат цілі та координат керованого об'єкта 1, пристрій формування команд керування 2, систему керування органами управління керованого об'єкта 3, командну радіолінію керування 4, пристрій аналізу параметрів руху керованого об'єкта 5, пристрій обчислення кута напрямку відстані між об'єктом і ціллю 6, пристрій утримання зміненого курсу (його поточного значення) 7. Пристрій наведення керованих об'єктів при перехопленні вільноманевруючих цілей працює наступним чином. Пристрій вимірювання координат цілі та координат керованого об'єкта 1 вимірює координати цілі та керованого об'єкта і передає їх на перший вхід пристрою формування команд керування 2 та 64728 4 на вхід пристрою аналізу параметрів руху керованого об'єкта 5. Пристрій формування команд керування 2 формує відповідні команди керування для управління керованим об'єктом і передає ці команди на вхід системи керування органами управління керованого об'єкта З, з виходу якого вироблені команди передаються на командну радіолінію керування 4 для передачі їх на керований об'єкт. Водночас пристрій вимірювання координат цілі та координат керованого об'єкта 1 передає дані про координати об'єкта на вхід пристрою аналізу параметрів руху керованого об'єкта 5, для визначення величини кутової швидкості напрямку відстані (зміні його поточного значення кута). При виникненні кутової швидкості напрямку відстані (зміні його поточного значення кута) її значення передається на пристрій обчислення кута напрямку відстані між об'єктом і ціллю 6, де обчислюється кут напрямку відстані між об'єктом і ціллю, формується команда на зміну курсу об'єкта до зменшення кутової швидкості до нуля і його значення передається на пристрій утримання зміненого курсу (його поточного значення) 7, де здійснюється подальше утримання даного курсу. Підвищення ефективності застосування пристрою наведення керованих об'єктів при перехопленні вільноманевруючих цілей, який заявляється, у порівнянні із прототипом, досягається за рахунок фіксування поточних координат цілі й об'єкта в базовій системі координат засобами радіолокації, а також шляхом обчислення кута напрямку відстані між об'єктом і ціллю спеціальним пристроєм. При цьому, при виникненні кутової швидкості напрямку відстані (зміні поточного значення кута) формується команда на зміну курсу об'єкта до зменшення кутової швидкості до нуля й подальше утримання даного курсу. Джерела інформації: 1. Торопчин А.Я. Довідник з ППО / А.Я.Торопчин, І.О.Романенко. - К.: МОУ, 2003. - С 29-32 - аналог. 2. Анцев Г.Я. Радиоэлектронные комплексы высокоточного оружия пятого поколения / Г.Я.Анцев // Военный парад.-2001. - №4. - С. 44-49 -прототип. 5 Комп’ютерна верстка А. Крижанівський 64728 6 Підписне Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for directing controlled objects at interception of free-maneuvering targets
Автори англійськоюSchypanskyi Pavlo Volodymyrovych, Sliepov Lev Ivanovych, Herasymenko Volodymyr Viktorovych, Kurovska Tetiana Yuriivna, Khomik Mykola Mykolaiovych
Назва патенту російськоюУстройство наведения управляемых объектов при перехвате свободно маневрирующих целей
Автори російськоюЩипанский Павел Владимирович, Слепов Лев Иванович, Герасименко Владимир Викторович, Куровская Татьяна Юрьевна, Хомик Николай Николаевич
МПК / Мітки
МПК: F41G 7/00
Мітки: наведення, перехопленні, об'єктів, керованих, цілей, вільноманевруючих, пристрій
Код посилання
<a href="https://ua.patents.su/3-64728-pristrijj-navedennya-kerovanikh-obehktiv-pri-perekhoplenni-vilnomanevruyuchikh-cilejj.html" target="_blank" rel="follow" title="База патентів України">Пристрій наведення керованих об’єктів при перехопленні вільноманевруючих цілей</a>
Спосіб наведення керованих об’єктів при перехопленні вільноманевруючих цілей
Номер патенту: 56476
Опубліковано: 10.01.2011
Автори: Невольніченко Анатолій Іванович, Слєпов Лев Іванович, Куровська Тетяна Юріївна, Хомік Микола Миколайович, Герасименко Володимир Вікторович
Мітки: вільноманевруючих, цілей, керованих, наведення, об'єктів, спосіб, перехопленні
Формула / Реферат:
Спосіб наведення керованих об'єктів при перехопленні вільноманевруючих цілей, при якому забезпечують зустріч об'єкта з ціллю у визначеній точці у розрахований час за допомогою комплексу засобів автоматизації, який відрізняється тим, що додатково фіксують поточні координати цілі й об'єкта у базовій системі координат за допомогою засобів радіолокації, обчислюють кут напрямку відстані між об'єктом і ціллю за допомогою спеціального пристрою, при...
Спосіб знищення повітряних цілей за допомогою дистанційно керованих безпілотних літальних апаратів
Номер патенту: 31157
Опубліковано: 25.03.2008
Автори: Галушка Володимир Іванович, Кононов Олексій Анатолійович, Лапицький Сергій Володимирович, Машталір Вадим Віталійович, Чіпіжко Юрій Анатолійович, Чучмій Андрій Володимирович, Степаненко Юрій Костянтинович, Василенко Олександр Васильович, Ткаченко Володимир Анатолійович, Мельник Олександр Дмитрович, Сила Ігор Михайлович, Комаров Володимир Олександрович, Борохвостов Ігор Валерійович, Схабіцький Вадим Романович, Лук'янов Павло Олександрович, Гордієвський Олексій Тихонович, Растригін Олександр Олексійович, Асланян Альберт Едуардович, Анпьонов Валентин Вадимович, Бондарчук Сергій Вікторович, Гребеник Олександр Миколайович, Парфеня Сергій Григорович
МПК: B64C 31/00, H04B 7/185
Мітки: повітряних, знищення, допомогою, спосіб, дистанційно, безпілотних, цілей, літальних, апаратів, керованих
Формула / Реферат:
Спосіб знищення повітряних цілей за допомогою дистанційно керованих безпілотних літальних апаратів, при якому підготовляють дистанційно керований безпілотний літальний апарат, що містить вбудоване навігаційне устаткування і систему GPS, підготовляють засоби ураження і розгортають пункт керування, установлюють засоби ураження на дистанційно керований безпілотний літальний апарат, проводять зліт дистанційно керованого безпілотного літального...
Спосіб знищення повітряних цілей за допомогою ударних дистанційно керованих безпілотних літальних апаратів
Номер патенту: 31128
Опубліковано: 25.03.2008
Автори: Асланян Альберт Едуардович, Гордієвський Олексій Тихонович, Парфеня Сергій Григорович, Степаненко Юрій Костянтинович, Ткаченко Володимир Анатолійович, Семенюк Римма Петрівна, Комаров Володимир Олександрович, Кононов Олексій Анатолійович, Василенко Олександр Васильович, Борохвостов Ігор Валерійович, Гребеник Олександр Миколайович, Сила Ігор Михайлович, Мельник Олександр Дмитрович, Анпьонов Валентин Вадимович, Растригін Олександр Олексійович, Сєткін В'ячеслав Вікторович, Лук'янов Павло Олександрович, Чучмій Андрій Володимирович, Чіпіжко Юрій Анатолійович, Машталір Вадим Віталійович, Схабіцький Вадим Романович, Лапицький Сергій Володимирович, Галушка Володимир Іванович
МПК: B64C 31/00, H04B 7/185
Мітки: дистанційно, знищення, керованих, цілей, допомогою, спосіб, літальних, апаратів, безпілотних, повітряних, ударних
Формула / Реферат:
1. Спосіб знищення повітряних цілей за допомогою ударних дистанційно керованих безпілотних літальних апаратів, при якому підготовлюють ударні дистанційно керовані безпілотні літальні апарати, кожний з яких містить вбудоване навігаційне устаткування, систему GPS і фото/відеоапаратуру, підготовлюють засоби ураження і розгортають пункт прийому інформації, встановлюють засоби ураження на кожний з ударних дистанційно керованих безпілотних...
Спосіб знищення наземних цілей за допомогою ударних дистанційно керованих безпілотних літальних апаратів
Номер патенту: 31127
Опубліковано: 25.03.2008
Автори: Мельник Олександр Дмитрович, Ткаченко Володимир Анатолійович, Ляшенко Ігор Олександрович, Невгад Сергій Степанович, Гребеник Олександр Миколайович, Чучмій Андрій Володимирович, Лапицький Сергій Володимирович, Сила Ігор Михайлович, Парфеня Сергій Григорович, Борохвостов Ігор Валерійович, Кононов Олексій Анатолійович, Галушка Володимир Іванович, Василенко Олександр Васильович, Кравченко Юрій Васильович, Ревенко Дмитро Леонідович, Машталір Вадим Віталійович, Чіпіжко Юрій Анатолійович, Пермяков Олександр Юрійович, Гордієвський Олексій Тихонович, Лук'янов Павло Олександрович, Комаров Володимир Олександрович, Асланян Альберт Едуардович, Растригін Олександр Олексійович
МПК: H04B 7/185, B64C 31/00
Мітки: спосіб, допомогою, ударних, наземних, цілей, безпілотних, знищення, апаратів, літальних, керованих, дистанційно
Формула / Реферат:
1. Спосіб знищення наземних цілей за допомогою ударних дистанційно керованих безпілотних літальних апаратів, при якому попередньо проводять повітряну розвідку в тилу противника, передають дані на командний пункт і виявляють за результатами розвідки наземні цілі, підготовлюють один, два або більше ударних дистанційно керованих безпілотних літальних апаратів, розміщають на зазначених ударних дистанційно керованих безпілотних літальних апаратах...
Пристрій супроводження радіолокаційних цілей
Номер патенту: 62816
Опубліковано: 12.09.2011
Автори: Клімішен Олексій Олегович, Карлов Дмитро Володимирович, Яцуценко Анатолій Якович, Челпанов Артем Володимирович, Пєвцов Геннадій Володимирович
МПК: G01S 13/52
Мітки: радіолокаційних, пристрій, супроводження, цілей
Формула / Реферат:
Пристрій супроводження радіолокаційних цілей, що містить послідовно з'єднані блок формування стробу, блок відбору позначок в стробі, блок визначення відхилень, блок вибору позначок та блок фільтрації і екстраполяції, який відрізняється тим, що додатково після блока визначення відхилень введено вузол непараметричної селекції у складі послідовно з'єднаних блока формування вибірок нев'язок, блока ранжування нев'язок та блока тестування вибірок,...
Попередній патент: Спосіб санації ехінококових кіст печінки при транскутанній пункції
Наступний патент: Спосіб визначення координат вогневої позиції артилерійської гармати
Випадковий патент: Робочий орган каменерізної машини