Пристрій супроводження радіолокаційних цілей
Номер патенту: 62816
Опубліковано: 12.09.2011
Автори: Клімішен Олексій Олегович, Челпанов Артем Володимирович, Яцуценко Анатолій Якович, Пєвцов Геннадій Володимирович, Карлов Дмитро Володимирович

Формула / Реферат
Пристрій супроводження радіолокаційних цілей, що містить послідовно з'єднані блок формування стробу, блок відбору позначок в стробі, блок визначення відхилень, блок вибору позначок та блок фільтрації і екстраполяції, який відрізняється тим, що додатково після блока визначення відхилень введено вузол непараметричної селекції у складі послідовно з'єднаних блока формування вибірок нев'язок, блока ранжування нев'язок та блока тестування вибірок, при цьому вхід блока формування вибірок нев'язок з'єднано з виходом блока визначення відхилень, другий вхід якого з'єднано з другим виходом блока фільтрації і екстраполяції, а вихід блока тестування вибірок з'єднано зі входом блока вибору позначок, входом пристрою є вхід блока відбору позначок в стробі, а виходом - вихід блока фільтрації і екстраполяції.
Текст
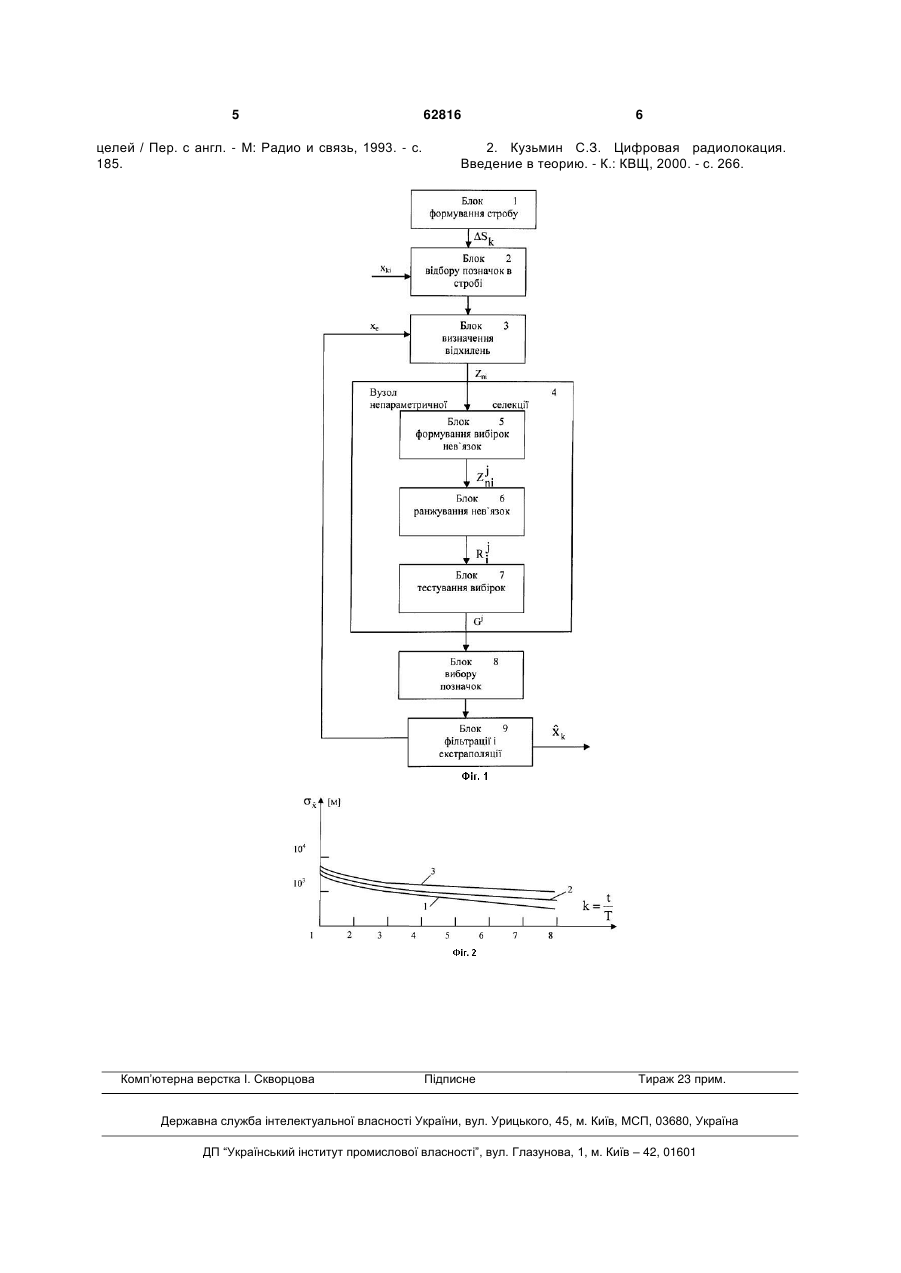
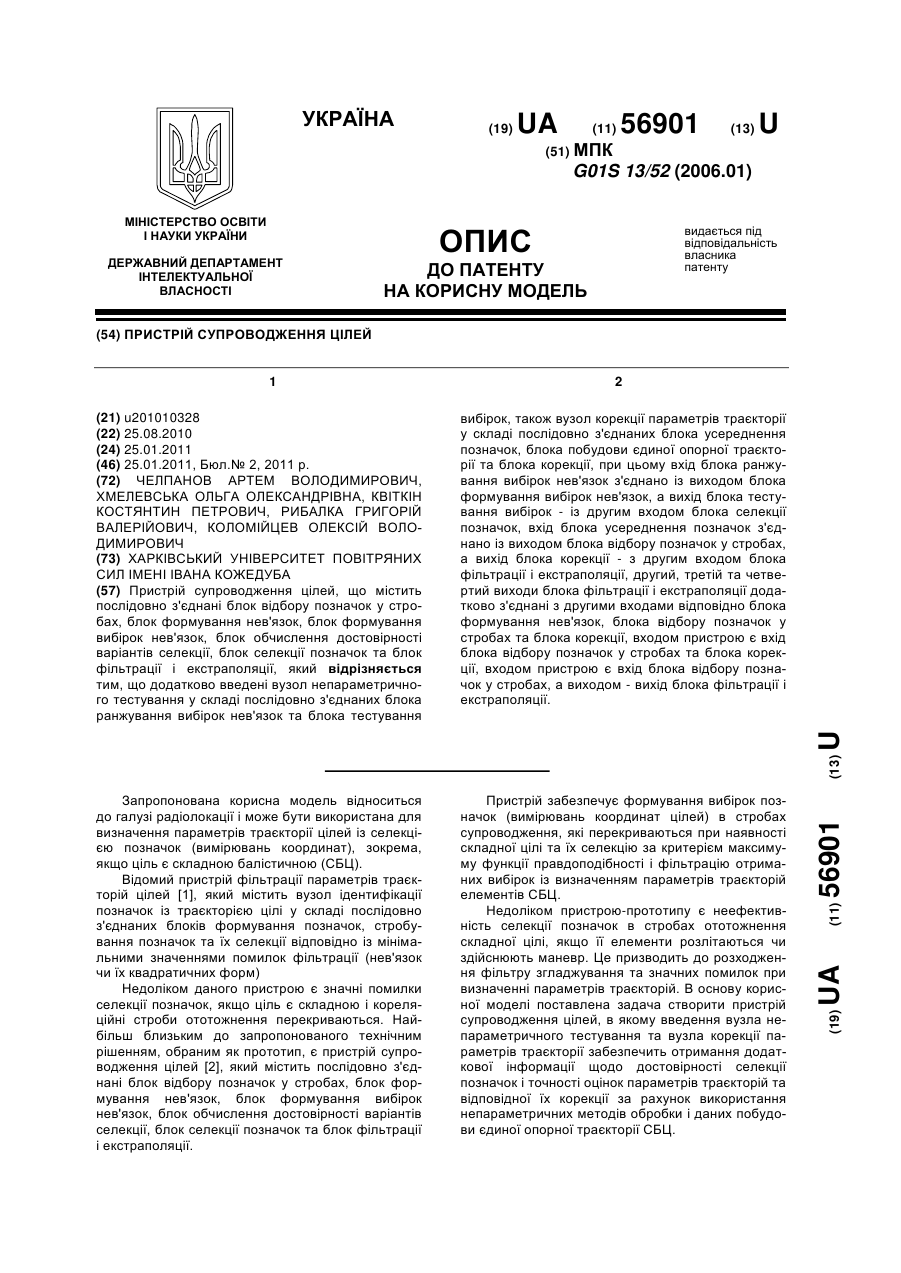
Пристрій супроводження радіолокаційних цілей, що містить послідовно з'єднані блок формування стробу, блок відбору позначок в стробі, блок 3 62816 дження в залежності від числа хибних позначок для різних варіантів селекції позначок. Запропонований пристрій супроводження радіолокаційних цілей містить послідовно з'єднанні блок формування стробу 1, блок відбору позначок в стробі 2, блок визначення відхилень 3, вузол непараметричної селекції 4 у складі послідовно з'єднаних блока формування вибірок нев'язок 5, блока ранжування нев'язок 6, блока тестування вибірок 7, а також блок вибору позначок 8 та блок фільтрації і екстраполяції 9, при цьому вхід блока формування вибірок нев'язок з'єднано з виходом блока визначення відхилень, другий вхід якого з'єднано з другим виходом блока фільтрації і екстраполяції, а вихід блока тестування вибірок з'єднано зі входом блока вибору позначок. Входом пристрою є вхід блока відбору позначок в стробі, а виходом - вихід блока фільтрації і екстраполяції. Робота запропонованого пристрою полягає у наступному. На вхід блока відбору позначок в стробі надходять позначки від цілей (виміри координат цілі) та хибні позначки (виміри за сигналами перешкод та залишків широкосмугових сигналів після оптимальної обробки, які перевищили поріг виявлення) хkі. В блоці здійснюється відбір позначок, які попадають в межі стробу супроводження (ототожнення). Строб формується у блоці 1, а його розмір ΔSk визначається помилками (дисперсією) вимірювання координат ції [1]: 2 ( x ek 2 ( x ), помилками екстраполя 2 ) та можливим прискоренням цілі a ( a ) 4 N Lmax Ї 1 mn n 1 Число вибірок можна зменшити, якщо використовувати для аналізу позначки із мінімальними нев'язками (mn≤3). Таким чином формуються L вибірок модульних значень нев'язок (блок 5): Z1i; Z1 i; ... Z1 2 Ni 1 ... j Zni Z j ; Z j ; ... Z j 1i 2i Ni ... L Z1i; ZLi; ... ZL 2 Ni . (3) При реалізації непараметричних методів аналізу в блоці 6 здійснюється ранжування значень нев'язок в L вибірках [3]: Rij j sqn Zij Zn k N(L 1) nk N1 l1 Sk 2 x 2 ek x ; 1 2 4 a T 4 , (1) де Sk - сумарна дисперсія відхилення позначки від параметра траєкторії цілі в k-ому циклі супроводження; с - деяка константа, яка визначає необхідну імовірність попадання позначки в строб (с=2…3). Позначки, які відібрані у межах стробу ΔSk, надходять на блок 3, в якому визначаються їх відхилення від екстрапольованих значень параметрів траєкторії цілі. В якості відхилень доцільно використовувати модульні значення нев'язок Z чи їх квадратичні форми Q в межах "ковзного вікна" останніх N циклів супроводження (від n=k-N+1 до) k: j Zni / xni x eni / , (2) де і - номер нев'язки в n-ому циклі супроводження; i=1,2,…, mn; j - номер послідовності (вибірки), складеної із нев'язок, отриманих в N останніх циклах супроводження; j=1,2,…, L. Максимальна кількість можливих вибірок , (4) де j=1,2,…, L. У даному випадку для ранжування використовуються складові вибірки - одна (j-та) дослідна, а решта - опорні. Для прийняття рішення, яка вибірка нев'язок (і відповідних позначок) з номером j=d відноситься до супроводжуваної траєкторії, використовуються тести рангової кореляції виду: N N i1 i1 j j G j i R1i R 2i ; (5) тоді j=d при Gd min G j jL Sk c Sk j j sqn Zij Zlj R1i R2i . (6) При виконанні умови (6) забезпечується мінімум сумарного відхилення параметрів позначок (виміряних значень) вибірки з номером d від параметрів траєкторії цілі. Крім того, перша складова (5) враховує амплітудні співвідношення нев'язок в межах дослідної вибірки якщо їх значення зменшуються, тобто позначки наближаються до траєкторії цілі. Така вибірка є більш достовірною, а сталість фільтра супроводження підвищується. Тестування вибірок відповідно (4), (5) здійснюється в блоці 7, а аналіз результатів (6) і вибір позначок - в блоці 8. Отримана вибірка позначок надходить до блока фільтрації і екстраполяції де фільтрається з визначенням (уточненням) оцінок параметрів суˆ проводжуваної траєкторії x k . Екстрапольовані значення хе використовуються у наступному циклі супроводження для визначення відхилень (нев'язок) в блоці 3. Послідовність включення в роботу окремих блоків пристрою та їх взаємодія визначається сіткою керуючих і синхронізуючих імпульсів, "прив'язаних" до сітки частот синхронізатора РЛС (вузол синхронізації і керування на схемі пристрою не показаний). Джерела інформації: 1. Фарина А., Студер Ф. Цифровая обработка радиолокационной информации. Сопровождение 5 целей / Пер. с англ. - М: Радио и связь, 1993. - с. 185. Комп’ютерна верстка І. Скворцова 62816 6 2. Кузьмин С.З. Цифровая радиолокация. Введение в теорию. - К.: КВЩ, 2000. - с. 266. Підписне Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for tracking radar targets
Автори англійськоюPevtsov Hennadii Volodymyrovych, Karlov Dmytro Volodymyrovych, Chelpanov Artem Volodymyrovych, Klimishen Oleksii Olehovych, Yatsutsenko Anatolii Yakovych
Назва патенту російськоюУстройство сопровождения радиолокационных целей
Автори російськоюПевцов Геннадий Владимирович, Карлов Дмитрий Владимирович, Челпанов Артем Владимирович, Климишен Алексей Олегович, Яцуценко Анатолий Яковлевич
МПК / Мітки
МПК: G01S 13/52
Мітки: радіолокаційних, супроводження, пристрій, цілей
Код посилання
<a href="https://ua.patents.su/3-62816-pristrijj-suprovodzhennya-radiolokacijjnikh-cilejj.html" target="_blank" rel="follow" title="База патентів України">Пристрій супроводження радіолокаційних цілей</a>
Пристрій супроводження цілей
Номер патенту: 56901
Опубліковано: 25.01.2011
Автори: Квіткін Костянтин Петрович, Коломійцев Олексій Володимирович, Хмелевська Ольга Олександрівна, Челпанов Артем Володимирович, Рибалка Григорій Валерійович
МПК: G01S 13/52
Мітки: супроводження, пристрій, цілей
Формула / Реферат:
Пристрій супроводження цілей, що містить послідовно з'єднані блок відбору позначок у стробах, блок формування нев'язок, блок формування вибірок нев'язок, блок обчислення достовірності варіантів селекції, блок селекції позначок та блок фільтрації і екстраполяції, який відрізняється тим, що додатково введені вузол непараметричного тестування у складі послідовно з'єднаних блока ранжування вибірок нев'язок та блока тестування вибірок, також...
Адаптивний пристрій супроводу маневруючих цілей

Номер патенту: 56074
Опубліковано: 15.04.2003
Автори: Сірик Юрій Анатолійович, Яровий Сергій Володимирович, Карлов Володимир Дмитрийович, Челпанов Артем Володимирович, Коваль Олександр Андрійович, Пащенко Руслан Едуардович
МПК: G01S 13/52, G01S 13/00
Мітки: пристрій, цілей, адаптивний, маневруючих, супроводу
Формула / Реферат:
Адаптивний пристрій супроводу маневруючих цілей, що містить послідовно з'єднані блоки фільтра Калмана другого порядку, фільтра Калмана третього порядку і комутатор, який відрізняється тим, що додатково введені блок виявлення маневру і блок оцінки інтенсивності маневру, причому блок виявлення маневру складається із послідовно з'єднаних блока формування вибірок, блока обчислення рангу, блока обчислення рангової статистики і порогового блока, а...
Спосіб розпізнавання державної належності радіолокаційних цілей

Номер патенту: 45733
Опубліковано: 15.04.2002
Автори: Обод Іван Іванович, Вінник Анатолій Тихонович, Полюга Валентин Петрович
МПК: G01S 13/79, G01S 13/75
Мітки: державної, цілей, належності, спосіб, радіолокаційних, розпізнавання
Формула / Реферат:
Спосіб розпізнавання державної належності радіолокаційних цілей, який полягає в тому, що випромінюють запитні сигнали, які приймають, дешифрують і випромінюють відповідні сигнали, які приймають і порівнюють їх відповідність із запитними сигналами, і за результатами порівняння видають сигнал розпізнання, який відрізняється тим, що запитні сигнали запам'ятовують, порівнюють запитні сигнали, що надходять, з тими, що зберігають в пам'яті і при...
Адаптивний пристрій фільтрації параметрів траєкторії цілей
Номер патенту: 67043
Опубліковано: 15.06.2004
Автори: Рафальський Юрій Іванович, Карлов Володимир Дмитрийович, Петрушенко Миколай Миколайович, Яровий Сергій Володимирович, Челпанов Артем Володимирович
МПК: G01S 13/52
Мітки: траєкторії, фільтрації, адаптивний, параметрів, пристрій, цілей
Формула / Реферат:
Адаптивний пристрій фільтрації параметра траєкторії цілі, що містить фільтр Калмана, пороговий блок і блок вибору максимуму, який відрізняється тим, що додатково введені три блоки пам'яті, блок суматора, блок формування вибірки, блок оцінки прискорення і блок корекції, до того ж, перший блок пам'яті, блок фільтра Калмана, другий блок пам'яті, блок суматора, блок формування вибірки, пороговий блок і блок вибору максимуму з'єднані послідовно,...
Пристрій рекурентної фільтрації параметрів траєкторії цілі
Номер патенту: 50281
Опубліковано: 25.05.2010
Автори: Смоляков Денис Олександрович, Ворошилов Сергій Вікторович, Челпанов Артем Володимирович, Піскунов Станіслав Миколайович
МПК: G01S 13/52
Мітки: рекурентної, траєкторії, пристрій, фільтрації, цілі, параметрів
Формула / Реферат:
Пристрій рекурентної фільтрації параметрів траєкторії цілі, який містить фільтр Калмана у складі послідовно з'єднаних блока фільтрації, блока екстраполяції і визначення кореляційної матриці помилок (КМП) та блока визначення коефіцієнта підсилення, який відрізняється тим, що додатково введено вузол визначення характеристик помилок та корекції КМП у складі послідовно з'єднаних блока визначення характеристик корельованих помилок, блока...
Попередній патент: Спосіб моделювання гострого токсичного гепатиту
Наступний патент: Сигналізатор рівня
Випадковий патент: Спосіб одержання кремнезему, який містить на поверхні шестивалентний хром