Безпошукова самопідстроювальна система керування

Формула / Реферат
Безпошукова самопідстроювальна система керування, що містить джерело енергопостачання, навантаження, виконавчий механізм, еталонну модель, регулятор, контур самопідстройки, яка відрізняється тим, що регулятор являє собою сполучення двох регуляторів: оптимального, що використовується в області значних відхилень критерію оптимізації, за який вибраний коефіцієнт використання потужності джерела енергопостачання, і звичайного, синтезованого, виходячи з заданих показників якості системи регулювання, працюючого в режимі слідкування, для чого еталонна модель виконана у вигляді двовходового частотно-модульованого слідкуючого фільтра, на один вхід якого подається сигнал напруги джерела енергопостачання, а на другий - сигнал, характеризуючий струм навантаження енергоспоживача; вихід моделі приєднано через синхронний детектор до звичайного регулятора системи автоматичного регулювання.
Текст
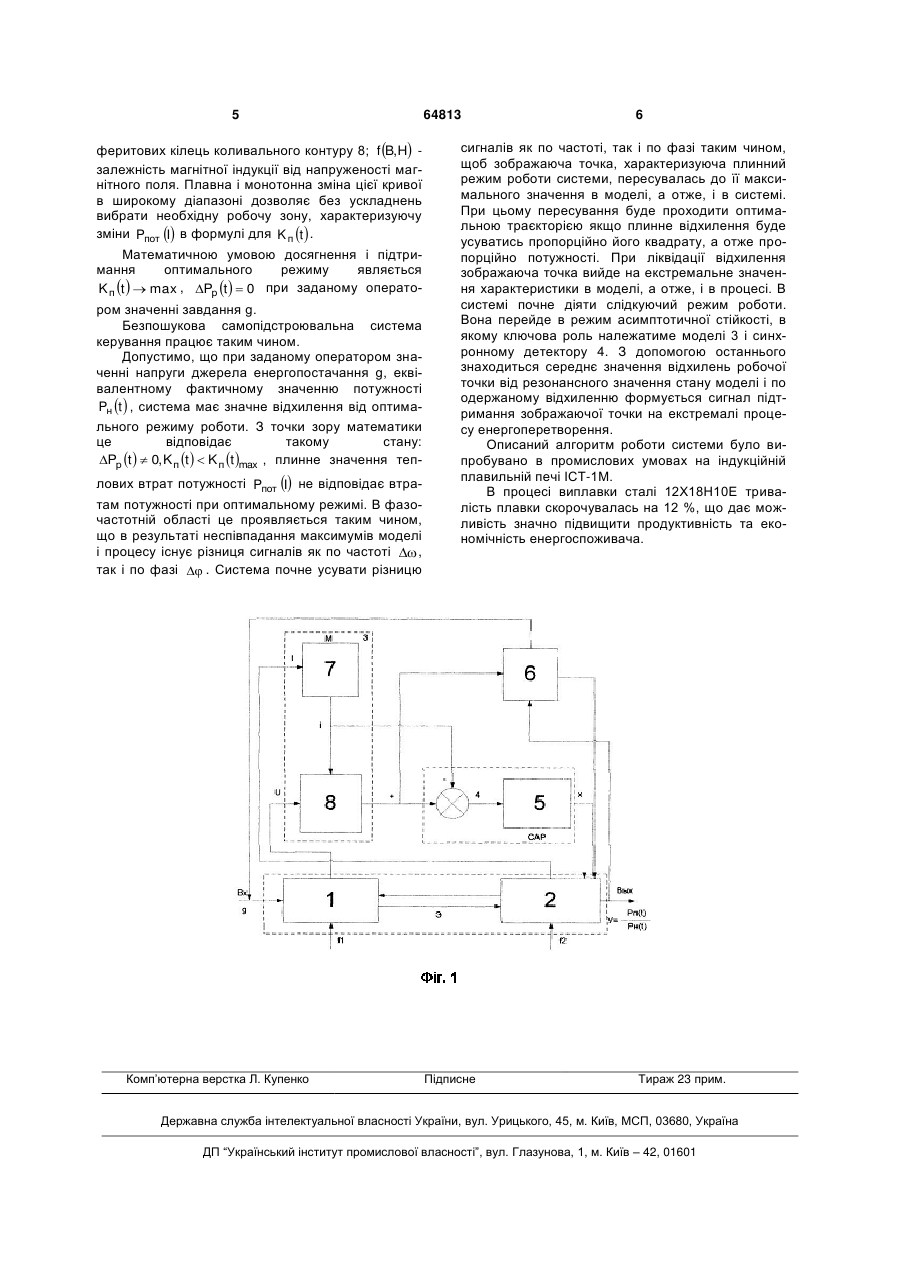
Безпошукова самопідстроювальна система керування, що містить джерело енергопостачання, навантаження, виконавчий механізм, еталонну модель, регулятор, контур самопідстройки, яка відрізняється тим, що регулятор являє собою сполучення двох регуляторів: оптимального, що використовується в області значних відхилень 3 за який вибраний коефіцієнт використання потужності джерела енергопостачання, і звичайного, синтезованого виходячи з заданих показників якості системи регулювання, працюючого в режимі слідкування, для чого еталонна модель виконана у вигляді двовходового частотно-модульованого слідкуючого фільтра, на один вхід якого подається сигнал напруги джерела енергопостачання, а на другий - сигнал, що характеризує струм навантаження енергоспоживача; вихід моделі приєднано через синхронний детектор до звичайного регулятора системи автоматичного регулювання. Запропонована структура безпошукової самопідстроювальної системи керування забезпечує більшу точність і швидкодію за рахунок заміни операцій інтегрування і виділення похідних на операції алгебраїчного підсумовування і множення в фазо-частотній області. При цьому спрощується і структура самої системи керування за рахунок вилучення спеціального блока обчислень і реалізації цих операцій безпосередньо в моделі. Суть пропонованої корисної моделі пояснюється кресленням, на якому представлена: - фіг. - структурна схема безпошукової самопідстроювальної системи керування. Структурна схема містить енергосистему, яка включає підсистему джерела живлення (постачання енергії) 1 і підсистему навантаження 2. Енергосистема має вхід Вх. і вихід Вих., а підсистеми 1, 2 пов'язані між собою прямими і зворотними потоками енергії (перетоки). Енергосистема находиться під впливом збурень f1 і f2. Якщо розглядати енергосистему як частину, що керується, (об'єкт), то керування процесом енергоперетворень відбувається за допомогою керуючої частини, до якої можна віднести еталонну модель 3, синхронний детектор 4, систему автоматичного регулювання (CAP) 5. Остання в свою чергу включає регулятор з підсилювачем і виконавчий механізм. На верхньому рівні керуючої частини знаходиться оптимізатор, за який вибраний оператор (ЛПР) 6. Серед цієї сукупності об'єктів, пов'язаних між собою різними формами взаємодії і залежності, головна роль відведена еталонній моделі 3. По своїй суті це параметрична модель, яка включає керований генератор синусоїдальних коливань (УГ) 7 і керований коливальний контур високої добротності (КК) 8. Сигнали, що характеризують струм І і напругу U силового кола, наприклад, індукційної плавильної печі, поступають одночасно на входи моделі. При цьому сигнал, що характеризує струм І, перетворюється з допомогою генератора в частотномодульований сигнал і, який подається безпосередньо в коливальний контур 8, а сигнал, що характеризує U діє на керовану індуктивність L коливального контуру 8, змінюючи його резонансну частоту. В результаті процеси, які відбуваються в часовій області в коливальному контурі перетворюються на процеси, які протікають в фазочастотній області і на виході моделі формується сигнал, який може характеризувати оптимальне рішення і відхилення від нього. За його допомогою може бути визначене плинне значення коефіцієнта виK п t користання потужності джерела енергопо 64813 4 стачання. Цей сигнал може бути представленим через складові частини таким чином: P I IU UI , (1) P t Pн t Pпот I Pp t Kп t п 1 пот Pн t Pн t Pн t Pн t де Pп t - фактичне значення корисної потужності, що виділяється на навантаженні; Pн t U I - фактичне значення потужності, яка може бути передана джерелом енергопостачання на навантаження; Pпот I - потужність втрат, яка залежить від струму силового кола; Pр t - недовикористана потужність джерела енергопостачання, виникаюча із-за відхилення від оптимального режиму по струму на I і по напрузі на U ; t - час. Складова частина Pр t через параметри моделі може бути представлена у вигляді: Pр t Li iL , (2) де L - керована індуктивність коливального контуру 8; i - частотно-модульований сигнал з керованого генератора 7, який поступає безпосередньо в коливальний контур 8; L, i - сигнали моделі, що характеризують відхилення від оптимального режиму енергоспоживача по струму на I і по паузі на U . В свою чергу вона входить і в вихідний сигнал моделі, знімаємий в якості напруги з індуктивності коливального контуру 8 d di dL di dL , (3) U t K t L i L dt п i dt L dt dt dt де Li - потокозчеплення котушки коливального контуру 8. З формул (1), (2), (3) випливає, що для того щоб напруга UL t на індуктивності коливального K t контуру характеризувала п так, щоб на її основі було можливо сформувати ефективний сигнал керування режимом роботи енергоспоживача, необхідно виконати такі умови: - по-перше, щоб максимум потужності, яка поступає від джерела енергопостачання до енергоспоживача співпадав з максимумом напруги коливального контуру в широкому діапазоні значень напруги, задаваемої технологічним режимом для енергоспоживача; - по-друге, щоб в цьому діапазоні приріст UL t однозначно характеризував Pр t ; - по-третє, щоб можливо було проводити корекцію (підстройку) максимуму на моделі з допомогою оптимізатора в процесі роботи енергоспоживача. Виконання третьої умови в моделі передбачено параметричним шляхом. Досягається це за рахунок вибору робочої точки моделі в стаціонарному режимі на кривій підмагнічування KK f B,H , де - магнітна проникливість 5 феритових кілець коливального контуру 8; f B,H залежність магнітної індукції від напруженості магнітного поля. Плавна і монотонна зміна цієї кривої в широкому діапазоні дозволяє без ускладнень вибрати необхідну робочу зону, характеризуючу зміни Pпот I в формулі для K п t . Математичною умовою досягнення і підтримання оптимального режиму являється K п t max , Pр t 0 при заданому оператором значенні завдання g. Безпошукова самопідстроювальна система керування працює таким чином. Допустимо, що при заданому оператором значенні напруги джерела енергопостачання g, еквівалентному фактичному значенню потужності Pн t , система має значне відхилення від оптимального режиму роботи. З точки зору математики це відповідає такому стану: Pр t 0, K п t K п t max , плинне значення теплових втрат потужності Pпот I не відповідає втратам потужності при оптимальному режимі. В фазочастотній області це проявляється таким чином, що в результаті неспівпадання максимумів моделі і процесу існує різниця сигналів як по частоті , так і по фазі . Система почне усувати різницю Комп’ютерна верстка Л. Купенко 64813 6 сигналів як по частоті, так і по фазі таким чином, щоб зображаюча точка, характеризуюча плинний режим роботи системи, пересувалась до її максимального значення в моделі, а отже, і в системі. При цьому пересування буде проходити оптимальною траєкторією якщо плинне відхилення буде усуватись пропорційно його квадрату, а отже пропорційно потужності. При ліквідації відхилення зображаюча точка вийде на екстремальне значення характеристики в моделі, а отже, і в процесі. В системі почне діяти слідкуючий режим роботи. Вона перейде в режим асимптотичної стійкості, в якому ключова роль належатиме моделі 3 і синхронному детектору 4. З допомогою останнього знаходиться середнє значення відхилень робочої точки від резонансного значення стану моделі і по одержаному відхиленню формується сигнал підтримання зображаючої точки на екстремалі процесу енергоперетворення. Описаний алгоритм роботи системи було випробувано в промислових умовах на індукційній плавильній печі ІСТ-1М. В процесі виплавки сталі 12Х18Н10Е тривалість плавки скорочувалась на 12 %, що дає можливість значно підвищити продуктивність та економічність енергоспоживача. Підписне Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSearchless self-adjusting control system
Автори англійськоюTsyhanash Viktor Yevhrafovych
Назва патенту російськоюБеспоисковая система автоподстройки системы управления
Автори російськоюЦыганаш Виктор Евграфович
МПК / Мітки
МПК: H05B 6/06
Мітки: керування, безпошукова, система, самопідстроювальна
Код посилання
<a href="https://ua.patents.su/3-64813-bezposhukova-samopidstroyuvalna-sistema-keruvannya.html" target="_blank" rel="follow" title="База патентів України">Безпошукова самопідстроювальна система керування</a>
Система керування газотурбогенератором
Номер патенту: 28087
Опубліковано: 26.11.2007
Автори: Пасічник Сергій Миколайович, Ніколаєнко Олексій Олександрович
МПК: F02C 9/18
Мітки: система, керування, газотурбогенератором
Формула / Реферат:
Система керування газотурбогенератором, що містить приводний газотурбінний двигун, який включає компресор, вихід якого з’єднаний з тяговою турбіною, яка з’єднана з ротором генератора, вихід якого з’єднаний з датчиком частоти обертання, який з’єднаний з системою регулювання, яка з’єднана з пристроєм перепуску повітря, яка відрізняється тим, що має аналогово-цифровий перетворювач, вхід якого з’єднаний з виходом датчика частоти обертання, а...
Система керування потужністю автономної вітроелектрогенеруючої установки
Номер патенту: 48038
Опубліковано: 10.03.2010
Автори: Стрункін Гліб Миколайович, Семенов Всеволод Всеволодович
МПК: H02K 17/34
Мітки: керування, установки, автономно, вітроелектрогенеруючої, потужністю, система
Формула / Реферат:
Система керування потужністю автономної вітроелектрогенеруючої установки на основі двоконтурної системи автоматичного керування перетворювачем частоти з внутрішнім контуром струму, а зовнішнім - кутової швидкості генератора, яка відрізняється тим, що вона містить блок нечіткого задання кутової швидкості, який розташовано перед регулятором кутової швидкості.
Система керування космічним літальним апаратом
Номер патенту: 46172
Опубліковано: 10.12.2009
Автори: Пасічник Сергій Миколайович, Грушецький Павло Сергійович
МПК: B64G 1/24
Мітки: система, літальним, керування, апаратом, космічним
Формула / Реферат:
Система керування космічним літальним апаратом, що містить датчик кута та датчик кутових швидкостей, які з'єднані через перший і другий масштабні блоки з формувачем закону керування, вихід якого через інтегратор підключений до першого входу порівнюючого пристрою, вихід підсилювача потужності з'єднаний з ротором електродвигуна, на роторі встановлений тахометр, з'єднаний з другим входом порівнюючого пристрою, яка відрізняється тим, що в неї...
Система керування космічним літальним апаратом
Номер патенту: 18400
Опубліковано: 15.11.2006
Автори: Бандура Іван Миколайович, Гордін Олександр Григорович, Малєва Людмила Сергіївна
МПК: B64G 1/24
Мітки: космічним, літальним, керування, апаратом, система
Формула / Реферат:
Система керування космічним літальним апаратом (КЛА), що містить триступеневий гіроскопічний виконавчий орган, датчики моментів на осях підвісу внутрішньої та зовнішньої рами, датчики кута та кутової швидкості КЛА, виходи яких, через попередні перетворювачі, з'єднані з входами блока керування, перший підсилювач потужності підключений до датчика моменту на осі підвісу зовнішньої рами, яка відрізняється тим, що в неї введені два маховики,...
Система автоматичного керування процесом екстрагування цукру з буряка
Номер патенту: 30553
Опубліковано: 25.02.2008
Автори: Заєць Наталія Анатоліївна, Ладанюк Анатолій Петрович
МПК: C13D 3/00
Мітки: екстрагування, цукру, автоматичного, система, буряка, процесом, керування
Формула / Реферат:
Система автоматичного керування процесом екстрагування цукру з буряка, що включає регулювання процесу екстрагування за вибраним критерієм на основі математичного опису об'єкта, яка відрізняється тим, що для керування температурним режимом роботи колонної дифузійної установки використовують адаптивну систему з еталонною моделлю.
Попередній патент: Пристрій для визначення стабільності низькотемпертурних термометрів
Наступний патент: Спосіб виготовлення поковки “гостряк”
Випадковий патент: Розріджувач сировинних сумішей