Система керування космічним літальним апаратом
Номер патенту: 18400
Опубліковано: 15.11.2006
Автори: Гордін Олександр Григорович, Малєва Людмила Сергіївна, Бандура Іван Миколайович
Формула / Реферат
Система керування космічним літальним апаратом (КЛА), що містить триступеневий гіроскопічний виконавчий орган, датчики моментів на осях підвісу внутрішньої та зовнішньої рами, датчики кута та кутової швидкості КЛА, виходи яких, через попередні перетворювачі, з'єднані з входами блока керування, перший підсилювач потужності підключений до датчика моменту на осі підвісу зовнішньої рами, яка відрізняється тим, що в неї введені два маховики, перший з яких встановлено на осі підвісу зовнішньої рами, другий - на корпусі КЛА, причому вісь підвісу зовнішньої рами та першого маховика співпадають з віссю підвісу другого маховика, а також блок переключення, перший вхід якого з'єднаний з виходом блока керування, а другий вхід - з першим виходом пристрою первинної обробки інформації, вхід якого з'єднаний з виходом датчика кута, розташованого на осі підвісу внутрішньої рами, другий вихід пристрою первинної обробки інформації через пристрій керування підключений до першого маховика, перший вихід блока переключення з'єднаний з входом першого підсилювача, другий вихід блока переключення через другий підсилювач потужності з'єднаний з другим маховиком, розташованим на корпусі КЛА.
Текст
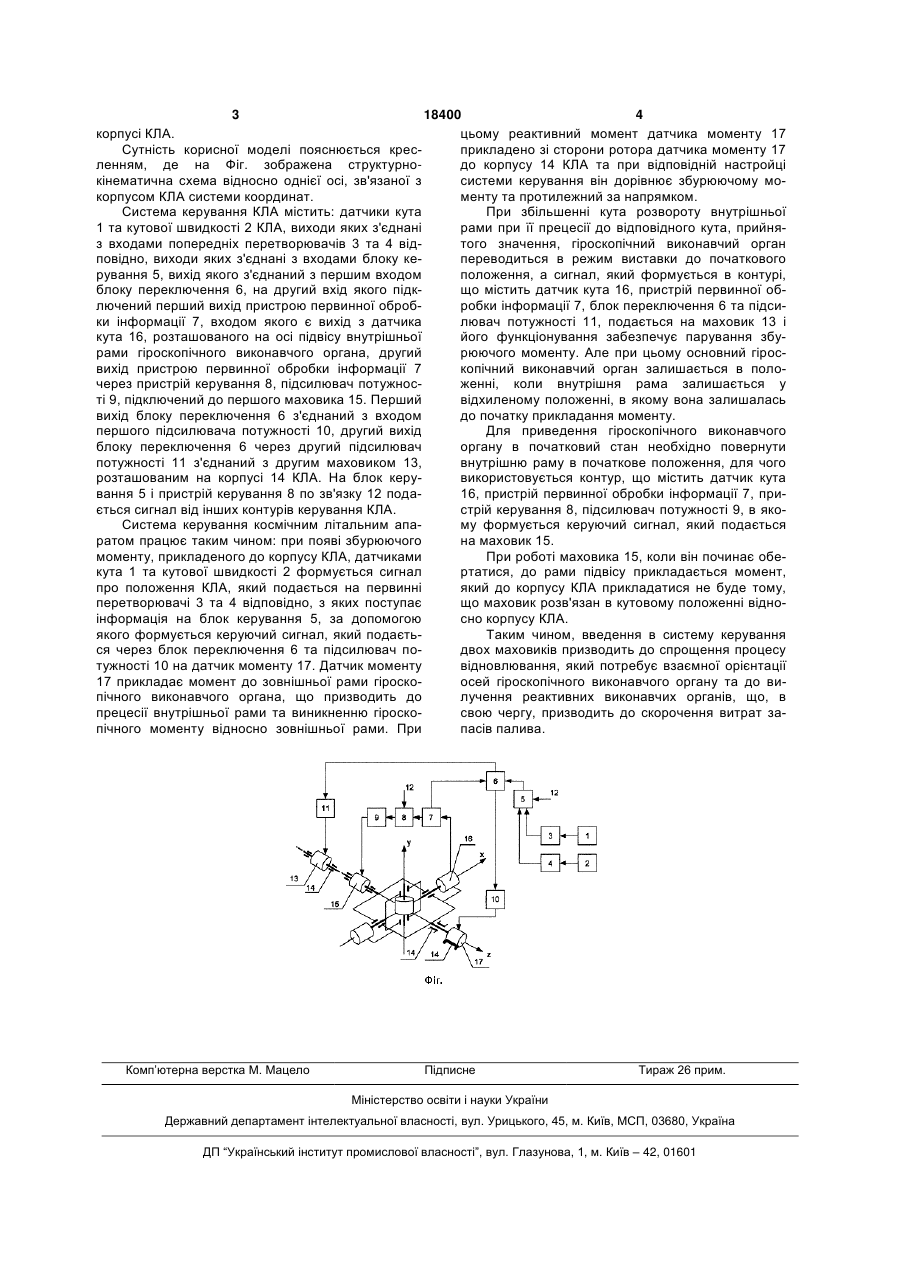
Система керування космічним літальним апаратом (КЛА), що містить триступеневий гіроскопічний виконавчий орган, датчики моментів на осях підвісу внутрішньої та зовнішньої рами, датчики кута та кутової швидкості КЛА, виходи яких, через попередні перетворювачі, з'єднані з входами блока керування, перший підсилювач потужності підключений до датчика моменту на осі підвісу зовні 3 18400 4 корпусі КЛА. цьому реактивний момент датчика моменту 17 Сутність корисної моделі пояснюється кресприкладено зі сторони ротора датчика моменту 17 ленням, де на Фіг. зображена структурнодо корпусу 14 КЛА та при відповідній настройці кінематична схема відносно однієї осі, зв'язаної з системи керування він дорівнює збурюючому мокорпусом КЛА системи координат. менту та протилежний за напрямком. Система керування КЛА містить: датчики кута При збільшенні кута розвороту внутрішньої 1 та кутової швидкості 2 КЛА, виходи яких з'єднані рами при її прецесії до відповідного кута, прийняз входами попередніх перетворювачів 3 та 4 відтого значення, гіроскопічний виконавчий орган повідно, виходи яких з'єднані з входами блоку кепереводиться в режим виставки до початкового рування 5, вихід якого з'єднаний з першим входом положення, а сигнал, який формується в контурі, блоку переключення 6, на другий вхід якого підкщо містить датчик кута 16, пристрій первинної облючений перший вихід пристрою первинної обробробки інформації 7, блок переключення 6 та підсики інформації 7, входом якого є вихід з датчика лювач потужності 11, подається на маховик 13 і кута 16, розташованого на осі підвісу внутрішньої його функціонування забезпечує парування збурами гіроскопічного виконавчого органа, другий рюючого моменту. Але при цьому основний гіросвихід пристрою первинної обробки інформації 7 копічний виконавчий орган залишається в полочерез пристрій керування 8, підсилювач потужносженні, коли внутрішня рама залишається у ті 9, підключений до першого маховика 15. Перший відхиленому положенні, в якому вона залишалась вихід блоку переключення 6 з'єднаний з входом до початку прикладання моменту. першого підсилювача потужності 10, другий вихід Для приведення гіроскопічного виконавчого блоку переключення 6 через другий підсилювач органу в початковий стан необхідно повернути потужності 11 з'єднаний з другим маховиком 13, внутрішню раму в початкове положення, для чого розташованим на корпусі 14 КЛА. На блок керувикористовується контур, що містить датчик кута вання 5 і пристрій керування 8 по зв'язку 12 пода16, пристрій первинної обробки інформації 7, приється сигнал від інших контурів керування КЛА. стрій керування 8, підсилювач потужності 9, в якоСистема керування космічним літальним апаму формується керуючий сигнал, який подається ратом працює таким чином: при появі збурюючого на маховик 15. моменту, прикладеного до корпусу КЛА, датчиками При роботі маховика 15, коли він починає обекута 1 та кутової швидкості 2 формується сигнал ртатися, до рами підвісу прикладається момент, про положення КЛА, який подається на первинні який до корпусу КЛА прикладатися не буде тому, перетворювачі 3 та 4 відповідно, з яких поступає що маховик розв'язан в кутовому положенні відноінформація на блок керування 5, за допомогою сно корпусу КЛА. якого формується керуючий сигнал, який подаєтьТаким чином, введення в систему керування ся через блок переключення 6 та підсилювач подвох маховиків призводить до спрощення процесу тужності 10 на датчик моменту 17. Датчик моменту відновлювання, який потребує взаємної орієнтації 17 прикладає момент до зовнішньої рами гіроскоосей гіроскопічного виконавчого органу та до випічного виконавчого органа, що призводить до лучення реактивних виконавчих органів, що, в прецесії внутрішньої рами та виникненню гіроскосвою чергу, призводить до скорочення витрат запічного моменту відносно зовнішньої рами. При пасів палива. Комп’ютерна верстка М. Мацело Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюControl system of spaceship
Автори англійськоюBandura Ivan Mykolaiovych, Hordin Oleksandr Hryhorovych
Назва патенту російськоюСистема управления космическим летательным аппаратом
Автори російськоюБандура Иван Николаевич, Гордин Александр Григорьевич
МПК / Мітки
МПК: B64G 1/24
Мітки: система, космічним, керування, апаратом, літальним
Код посилання
<a href="https://ua.patents.su/2-18400-sistema-keruvannya-kosmichnim-litalnim-aparatom.html" target="_blank" rel="follow" title="База патентів України">Система керування космічним літальним апаратом</a>
Система керування космічним літальним апаратом
Номер патенту: 11982
Опубліковано: 16.01.2006
Автори: Ворончук Сергій Петрович, Гавриленко Олег Іванович
МПК: B64G 1/24
Мітки: літальним, космічним, керування, апаратом, система
Формула / Реферат:
Система керування космічним літальним апаратом, що складається з датчика кута, датчика кутових швидкостей, першого та другого масштабного блоків, послідовно з'єднаних підсилювача потужності, електродвигуна, ротора електродвигуна, тахометра, яка відрізняється тим, що додатково введено мікропроцесорний пристрій, перший і другий вхід якого з'єднані з виходами першого і другого масштабних блоків відповідно, вихід мікропроцесорного блока з'єднаний...
Система керування космічним літальним апаратом

Номер патенту: 67029
Опубліковано: 15.06.2004
Автори: Погудін Андрій Володимирович, Бандура Іван Миколайович, Батаєв Віктор Олександрович, Овсяннікова Ірина Валеріївна
МПК: B64G 1/24
Мітки: літальним, космічним, керування, апаратом, система
Формула / Реферат:
Система керування космічним літальним апаратом, що містить датчик кута та датчик кутових швидкостей, які з'єднані через перший і другий масштабні блоки з формувачем закону керування, і підсилювач потужності, яка відрізняється тим, що в неї введені послідовно включені інтегратор, порівнюючий пристрій, з'єднаний через підсилювач потужності з ротором електродвигуна, на роторі встановлений тахометр, який з'єднаний з другим входом порівнюючого...
Спосіб керування літальним апаратом та зміни його аеродинамічного компонування і система керування
Номер патенту: 55253
Опубліковано: 15.03.2005
Автори: Смішко Григорій Павлович, Сайног Максим Борисович, Косовенко Євген Вікторович, Семенов Леонід Антонович, Комендантова Людмила Степанівна, Кузьмін В'ячеслав Павлович, Доценко Борис Іванович, Егліт Микола Олександрович, Яковенко Петро Олексійович
МПК: F42B 15/01
Мітки: спосіб, аеродинамічного, система, зміни, керування, компонування, літальним, апаратом
Формула / Реферат:
1. Спосіб керування літальним апаратом та зміни його аеродинамічного компонування, який полягає у зміні кількості рулів, що беруть участь у процесі керування літальним апаратом, який відрізняється тим, що здійснюють одночасне розкривання двох пар рулів і приведення в дію першої пари рулів для керування по тангажу і (або) рисканню, а другу пару рулів утримують під нульовим кутом, використовуючи їх як стабілізатори, поки виконується...
Спосіб керування літальним апаратом та зміни його аеродинамічної компоновки і система керування
Номер патенту: 55253
Опубліковано: 17.03.2003
Автори: Косовенко Євген Вікторович, Семенов Леонід Антонович, Яковенко Петро Олексійович, Комендантова Людмила Степанівна, Егліт Микола Олександрович, Кузьмін В'ячеслав Павлович, Доценко Борис Іванович, Сайног Максим Борисович, Смішко Григорій Павлович
МПК: F42B 15/01
Мітки: зміни, аеродинамічної, спосіб, літальним, компоновки, апаратом, керування, система
Формула / Реферат:
1. Спосіб керування літальним апаратом та зміни його аеродинамічного компонування, який полягає у зміні кількості рулів, що беруть участь у процесі керування літальним апаратом, який відрізняється тим, що здійснюють одночасне розкривання двох пар рулів і приведення в дію першої пари рулів для керування по тангажу і (або) рисканню, а другу пару рулів утримують під нульовим кутом, використовуючи їх як стабілізатори, поки виконується...
Обчислювальна система візуального керування літальним апаратом
Номер патенту: 56876
Опубліковано: 15.05.2003
Автори: Гусятін Володимир Михайлович, Янковський Олександр Аркадійович
МПК: G06F 7/548, B64F 1/00
Мітки: обчислювальна, система, візуального, літальним, апаратом, керування
Формула / Реферат:
Обчислювальна система візуального керування літальним апаратом, що містить формувач сигналів зображення і блок керування, яка відрізняється тим, що в неї введені графічний спецпроцесор для систем візуалізації, блок обчислень по 3D-об'єктах, блок зв'язку з бортовим комп'ютером, зв'язаний двоспрямовано з блоком керування, перший пристрій для обчислення швидких геометричних перетворень, зв'язаний двоспрямовано з блоком керування і з’єднаний...
Попередній патент: Вихрова труба
Наступний патент: Гвинтовий секційний карданний робочий орган
Випадковий патент: Спіральний теплообмінник