Спосіб визначення приведеного моменту інерції механізму
Номер патенту: 42988
Опубліковано: 15.11.2001
Автори: Кухарчук Василь Васильович, Кучерук Володимир Юрійович, Кулаков Павел Ігоревич, Поджаренко Андрій Володимирович
Формула / Реферат
Спосіб визначення приведеного моменту інерції механізму, який включає розгін механізму і перевод його в стан самогальмування з почерговою установкою на вихідний вал механізму двох зразкових моментів інерції, ідентичних за формою і відмінних по щільності матеріалу, з наступною реєстрацією інформативних параметрів і обчисленням приведеного моменту інерції, який відрізняється тим, що як інформативні параметри реєструють кутову швидкість у функції часу, а приведений момент інерції механізму обчислюють по формулі
де J1, J2 - значення моментів інерції відповідно першого і другого зразкових моментів інерції; wном - номінальна кутова швидкість вихідного вала механізму;
wrl(t), wr2(t) - кутові швидкості у функції часу t в дослідах самогальмування механізму відповідно з першим і другим зразками моменту інерції.
Текст
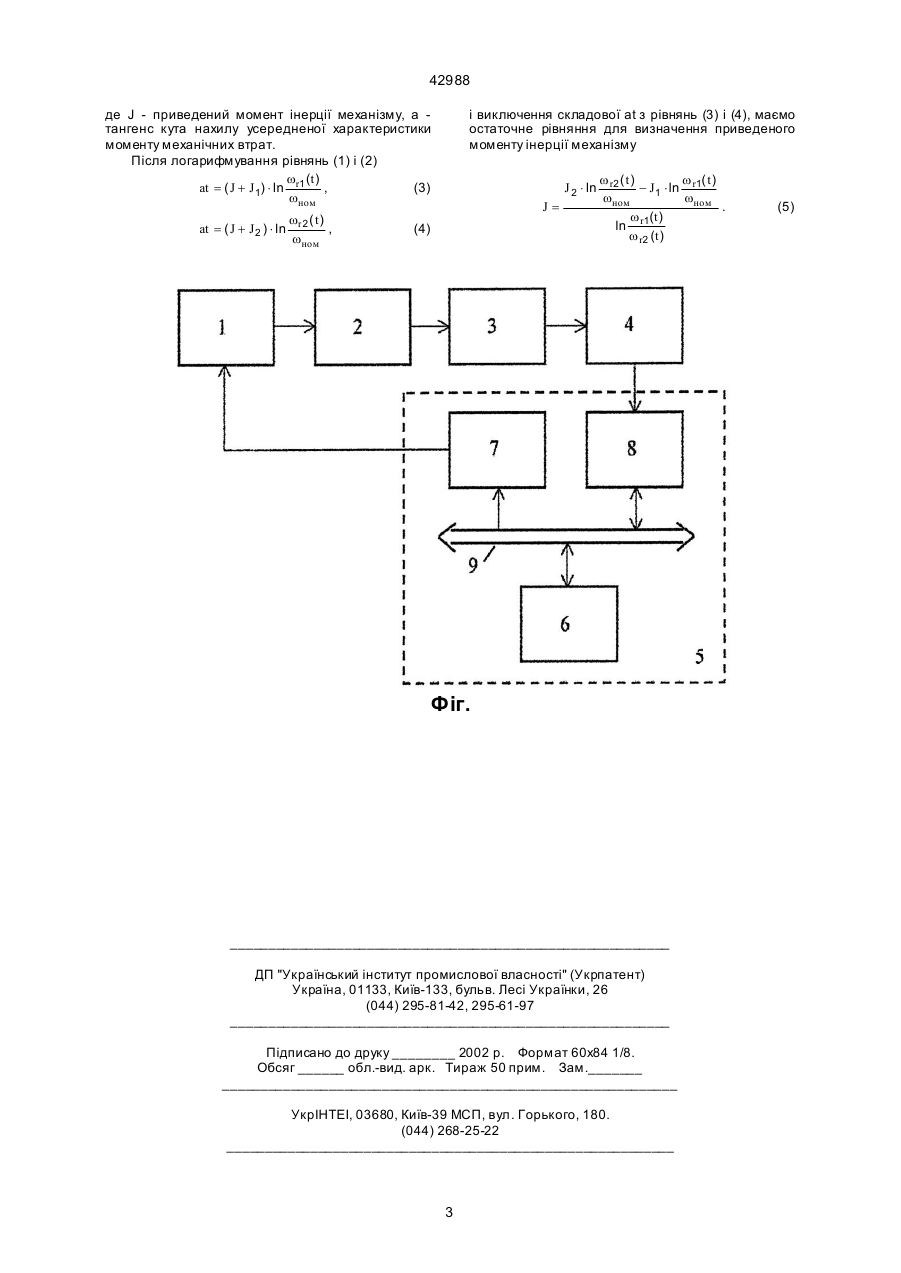
Спосіб визначення приведеного моменту інерції механізму, який включає розгін механізму і перевід його в стан самогальмування з почерговою установкою на вихідний вал механізму двох зразкових моментів інерції, ідентичних за формою і відмінних по щільності матеріалу, з наступною реєстрацією інформативних параметрів і обчисленням приведеного моменту інерції, який відрізня ється тим, що як інформативні параметри реєструють кутову швидкість у функції часу, а приведений момент інерції механізму обчислюють по формулі Винахід відноситься до вимірювальної техніки і може бути використаний у заводських і науководослідних лабораторіях для визначення приведеного моменту інерції обертового вала механізму. Відомий спосіб визначення приведеного моменту інерції механізму, який полягає в тому, що механізм приводять в обертання, вимірюють величини рушійного моменту, швидкості і прискорення, потім механізм гальмують і вимірюють величину гальмового моменту інерції при тих же значеннях швидкості і прискорення, а величину приведеного моменту інерції механізму обчислюють як частка від ділення півсуми рушійного й гальмового моментів на величину прискорення (А.с. СРСР № 311158, МКИ G01М1/10, заявл. 14.02.1969, опубл. 09.08.1971, Бюл. № 24). Недоліком аналога є низька точність визначення приведеного моменту інерції механізму. Низька точність визначення приведеного моменту інерції механізму за зазначеним аналогом зумовлена тим, що похибки виміру рушійного й гальмового моментів є великими в порівнянні з похибками виміру інших інформативних параметрів за рахунок великої похибки датчика моменту. Крім того, за умовою реалізації способу рушійний і гальмовий моменти необхідно вимірювати при деяких фіксованих значеннях кутових швидкості й прискорення, що накладає додаткову похибку визначення цих фіксованих значень. За прототип обраний спосіб визначення приведеного моменту інерції (Поджаренко В.О., Кучерук В.Ю., Гоменюк А.С. Новий спосіб вимірювання моменту інерції електричних машин // Науковотехнічнйй збірник "Автоматизація технологічних процесів та промислова екологія". – Вип. 1. – 1997. - С. 23-27). Сутність способу полягає в тому, що на вихідний вал механізму по черзі встановлюють два зразкових моменти інерції, ідентичних за формою і різних по щільності матеріалу, із якого вони виготовлені, механізм розганяють і переводять у стан самогальмування, при цьому реєструють кутове прискорення у функції кутової швидкості, а приведений момент інерції обчислюють по формулі J 2 × ln J= w r2 ( t ) w ( t) - J1 × ln r1 wном wном , w r1(t ) ln w r2 (t ) де J1, J2 - значення моментів інерції відповідно першого і другого зразкових моментів інерції; e1 , e2 - кутові прискорення в дослідах самогальмування механізму відповідно з першим і другим зразковими моментами інерції, значення яких беруть при тому самому значенні кутової швидкості вала механізму w. (13) 42988 (11) UA J 2e 2 ( w) - J1e1(w) , e 1(w) - e 2 ( w) (19) J= A де J1, J2 - значення моментів інерції відповідно першого і другого зразкових моментів інерції; wном номінальна кутова швидкість вихідного вала механізму; wr1(t), wr2(t) - кутові швидкості у функції часу t в дослідах самогальмування механізму відповідно з першим і другим зразками моменту інерції. 42988 Недоліком є низька точність визначення приведеного моменту інерції механізму. Низька точність визначення приведеного моменту інерції механізму за зазначеним прототипом зумовлена тим, що у формулу для визначення приведеного моменту інерції входять кутові прискорення, які визначаються з великою похибкою, як для аналогових, так і для цифрових акселерометрів за рахунок аналогового чи цифрового диференціювання експериментальних даних із ви ходу да тчика кутової швидкості. В основу винаходу поставлено задачу розробки способу визначення приведеного моменту інерції механізму, в якому введення нових операцій дозволяє визначати приведений момент інерції механізму без використання значень кутового прискорення у функції кутової швидкості обертання. При цьому досягаються споживчі властивості, що полягають у підвищенні точності визначення приведеного моменту інерції механізму шляхом виключення похибки від операції диференціювання кутової швидкості обертання. Точність визначення приведеного моменту інерції підвищується за рахунок виключення з процедури обробки результатів операцій диференціювання і згладжування значень кутової швидкості. Сутність винаходу полягає в тому, що у відомому способі визначення приведеного моменту інерції механізму на його вихідний вал по черзі встановлюють два зразкових моменти інерції, ідентичних за формою і різних по щільності матеріалу, із якого вони виготовлені, механізм розганяють і переводять у стан самогальмування, при цьому реєструють кутову швидкість у функції часу, потім приведений момент інерції обчислюють по формулі J 2 × ln J= У даному пристрої з метою мінімізації апаратних засобів вимір часу здійснюється програмно. Спосіб здійснюється таким чином. На вихідний кінець вала випробуваного механізму 1 за допомогою блоку зразкових моментів інерції 3 установлюють перший зразковий момент інерції J1, виконаний у виді тіла обертання, наприклад, диску чи циліндру. Як матеріал для виготовлення першого зразку беруть, наприклад, сплави алюмінію. Значення моменту інерції J1 обчислюють за його геометричними і ваговими параметрами. Ме ханізм 1 із першим зразковим моментом інерції J1 розганяють до номінальної кутової швидкості wном , знімають рушійний момент і в процесі самогальмування механізму реєструють кутову швидкість вихідного вала wr1(t) за допомогою датчика кутової швидкості 4. Самогальмування механізму відбувається під дією моменту механічних втрат. Інтервал частот обертання в процесі самогальмування механізму 1 обмежується, наприклад, до одного обороту з міркування достатності одержання необхідної кількості інформації для подальших розрахунків моменту інерції. Поза цим інтервалом, із метою підвищення швидкодії може бути застосоване інтенсивне гальмування механізму 1, наприклад, методом противключення. По закінченні гальмування знімають перший зразковий момент інерції J1 і так само встановлюють другий зразковий момент інерції J2. Др угий зразковий момент інерції має такі ж геометричні розміри, як і перший зразок, але матеріал для його виготовлення обраний інший, наприклад, сплави заліза з вуглецем. З механізмом 1, з'єднаним із другим зразковим моментом інерції J2, проводять такий самий процес розгону і самогальмування і так само реєструють кутову швидкість wr2(t) за допомогою датчика кутової швидкості 4, як і у випадку з першим зразковим моментом інерції J1. Так як перший і другий зразкові моменти інерції мають ідентичні форми, то вони разом з механізмом при тій самій за значенням кутовій швидкості створюють рівні за величиною моменти вентиляційних втрат і, таким чином, у першому і другому дослідах самогальмування механізм 1 гальмується ідентичними динамічними моментами механічних втрат. Відомо, що в режимі самогальмування кутова швидкість змінюється за експонентним законом (див.: Бондаренко Г.Д. Повышение точности определения параметров неуравновешенности роторов при балансировке на выбеге // Автоматизація і сучасні технології. – М., 1995. - № 6. - С. 15-19). Рівняння руху механізму відповідно з першим і другої зразковими моментами інерції в процесах самогальмування мають вид w r2 ( t ) w ( t) - J1 × ln r1 wном wном , w r1(t ) ln w r2 (t ) де J1, J2 - значення моментів інерції відповідно першого і другого зразкових моментів інерції; wном номінальна кутова швидкість вихідного вала механізму; wr1(t), wr2(t) - кутові швидкості у функції часу t в дослідах самогальмування механізму відповідно з першим і другим зразковими моментами інерції. На кресленні (фіг.) представлена структурна схема пристрою для реалізації пропонованого способу, яка містить випробуваний механізм 1, вихідний вал якого через муфту спряження 2 послідовно з'єднаний із блоком зразкових моментів інерції 3 і датчиком кутової швидкості 4, вимірювально-керуючу систему 5, що включає в себе мікроЕОМ 6, пусковий пристрій 7, блок виміру кутової швидкості 8, системну шину 9, підключену з однієї сторони до мікро-ЕОМ 6, а з іншої сторони до входу пускового пристрою 7, керуючим виходам і входам блоку виміру кутової швидкості 8, вихід пускового пристрою 7 з'єднаний із входом керування випробуваного механізму, вихід датчика кутової швидкості з'єднаний з вимірювальним входом блоку виміру кутової швидкості 8. Визначення початку і кінця вимірів здійснюється програмно мікро-ЕОМ 6. at w r1( t ) = wном × e J + J 1 , w r 2 ( t ) = wном × e 2 at J +J 2 , (1) (2) 42988 де J - приведений момент інерції механізму, а тангенс кута нахилу усередненої характеристики моменту механічних втрат. Після логарифмування рівнянь (1) і (2) w (t ) at = ( J + J1) × ln r1 , (3) wном at = ( J + J2 ) × ln wr 2 ( t ) , wном і виключення складової at з рівнянь (3) і (4), маємо остаточне рівняння для визначення приведеного моменту інерції механізму J 2 × ln J= (4) w r2 ( t ) w ( t) - J1 × ln r1 wном wном . w r1(t ) ln w r2 (t ) Фіг. __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2002 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 3 (5)
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of the actuated moment of mechanism inertia
Автори англійськоюKucheruk Volodymyr Yuriiovych, Kukharchuk Vasyl Vasyliovych, Kulakov Pavlo Ihorovych, Podzharenko Andrii Volodymyrovych
Назва патенту російськоюСпособ определения приведенного момента инерции механизма
Автори російськоюКучерук Владимир Юрьевич, Кухарчук Василий Васильевич, Кулаков Павел Игоревич, Поджаренко Андрей Владимирович
МПК / Мітки
МПК: G01M 1/10
Мітки: моменту, інерції, спосіб, механізму, визначення, приведеного
Код посилання
<a href="https://ua.patents.su/3-42988-sposib-viznachennya-privedenogo-momentu-inerci-mekhanizmu.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення приведеного моменту інерції механізму</a>
Спосіб визначення моменту інерції ротора
Номер патенту: 29304
Опубліковано: 16.10.2000
Автор: Сокол Володимир Моріцевич
МПК: G01M 1/10
Мітки: моменту, визначення, спосіб, інерції, ротора
Формула / Реферат:
1. Спосіб визначення моменту інерції ротора, який полягає в тому, що момент інерції ротора, маса якого m і радіус r0 відомі, визначають, вимірюючи кутову швидкість як відношення лінійної швидкості ротора до радіус-вектора точки з цією лінійною швидкістю, який відрізняється тим, що момент інерції J ротора визначають як співвідношення його маси m, кутової швидкості, критичної...
Спосіб визначення моменту інерції ротора асинхронноі машини
Номер патенту: 31973
Опубліковано: 15.12.2000
Автори: Кухарчук Василь Васильович, Козловський Андрій Володимирович
МПК: G01L 3/00
Мітки: визначення, ротора, асинхронноі, машини, моменту, інерції, спосіб
Текст:
...ротора. На фіг. 1 представлено графічне зображення перехідних процесів у перетворювачі без урахування перехідних процесів у ОВ та з урахуванням цих перехідних процесів, на фіг. 2 зображено схему пристрою для реалізації способу, на фіг. З зображено алгоритм виконання способу, на фіг. 4 зображені часові діаграми роботи процесорного засобу вимірювання моменту інерції. Пристрій, який дозволяє реалізувати запропонований спосіб визначення пускового...
Спосіб визначення моменту інерції тіла складної форми
Номер патенту: 23958
Опубліковано: 31.08.1998
Автори: Чечельницький Станіслав Борисович, Горлов Олег Петрович, Богарсуков Сергій Іванович, Нечуйвітер Леонід Іванович, Гаркуша Павло Миколайович, Карабан Володимир Миколайович
МПК: G01M 1/10
Мітки: спосіб, тіла, форми, інерції, визначення, моменту, складної
Формула / Реферат:
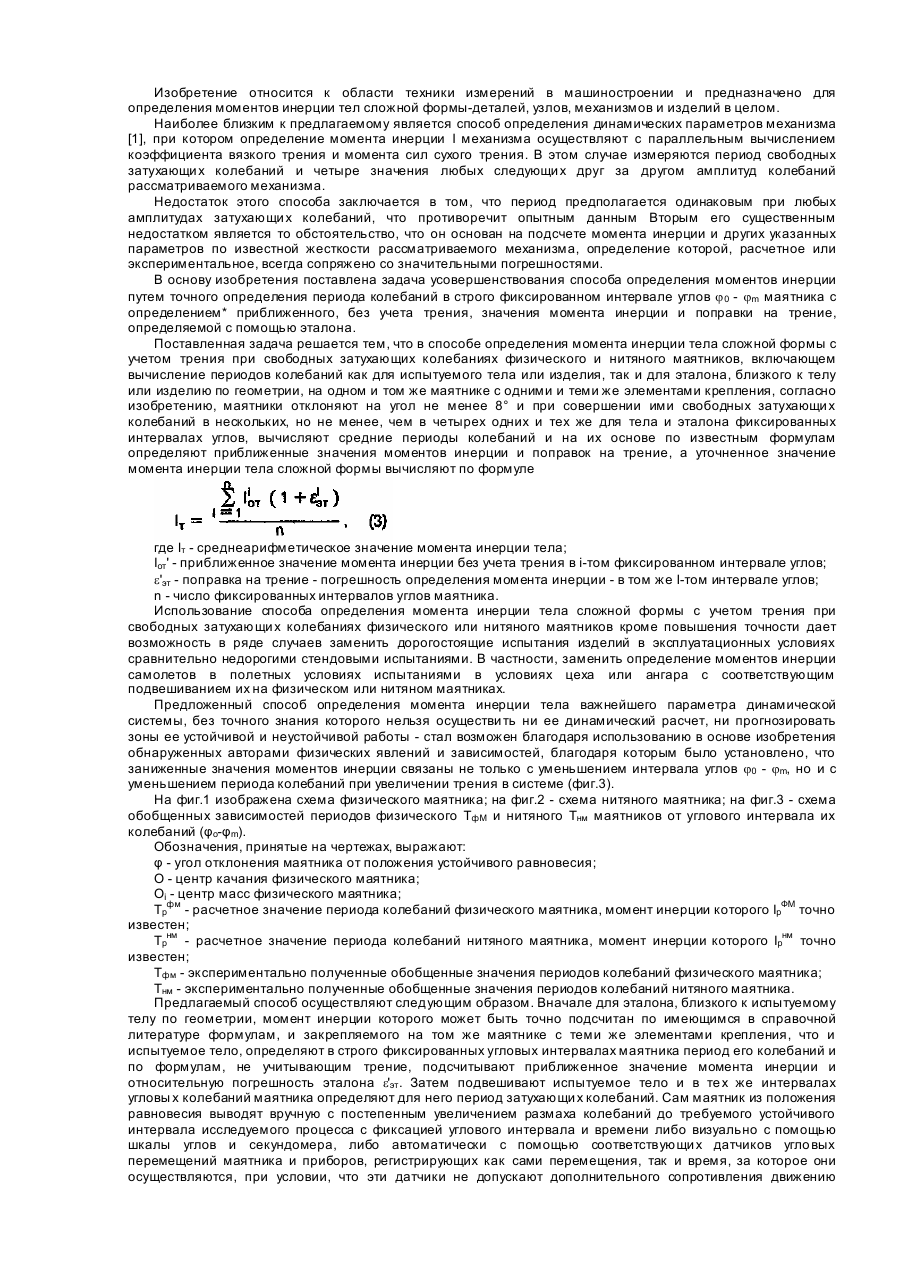
Способ определения момента инерции тела сложной формыс учетом трения при свободных затухающих колебаниях физического и нитяного маятников, включающий вычисление периодов колебаний как для испытуемого тела или изделия, так и для эталона, близкого к телу или изделию по геометрии, на одном и том же маятнике с одними и теми же элементами крепления, отличающийся тем, что маятники отклоняют на угол не менее 8° и при совершении ими свободных...
Маховик перемінного моменту інерції

Номер патенту: 31186
Опубліковано: 15.12.2000
Автори: Бондарєв Сергій Валентинович, Овсієнко Лариса Григорівна, Бондарєв Валентин Степанович, Тарасов Юрій Михайлович
МПК: F16F 15/30
Мітки: перемінного, моменту, інерції, маховик
Текст:
...аксіально рортзхора нї каналів S. Кгрпус і маховика гакріплений на валу 3 машини. Висота лопаток £ та 6 з одного торца, яка дорівнює h, більше висоти лопаток 3 та 7 а другого торца, яка дорівнює h f t як Ї/. ІНІМ ^ТЙ г" гва рагі;, отж^ h >= 2h^. Б порсжнині маховика анахо Маховик перемінного моменту інерції npsnrce т=:-с:м При пуск/ машини ибзргакгзїй момент від SSLT/ ЧІІНСИ. 9 перелаемся корпусу і маховика, який починає...
Спосіб визначення пускового моменту електродвигуна
Номер патенту: 30884
Опубліковано: 15.12.2000
Автори: Козловський Андрій Володимирович, Кухарчук Василь Васильович, Поджаренко Володимир Олександрович
МПК: G01L 3/10
Мітки: спосіб, пускового, моменту, електродвигуна, визначення
Формула / Реферат:
Спосіб визначення пускового моменту електродвигуна шляхом вимірювання поточного значення пускового моменту на його роторі у кожному кутовому положенні, відрізняється тим, що ротор випробуваного двигуна обертають зовнішнім приводним кроковим двигуном в покроковому режимі причому перехід з попереднього кутового положення в наступне здійснюють після закінчення перехідного процесу в перетворювачі, тривалість якого знаходять за...
Попередній патент: Спосіб очистки стічних вод від барвників
Наступний патент: Автоматичний регулятор конденсаторних батарей
Випадковий патент: Спосіб вироблення ефірно-олійного екстракту з бурштину