Мікропроцесорна система керування тяговою передачею локомотива
Номер патенту: 65187
Опубліковано: 15.03.2004
Автори: Поляченко Олена Юріївна, Кашура Олександр Леонідович, Вівденко Юрій Григорійович, Спірягін Валентин Ігоревич, Горбунов Микола Іванович, Спірягін Максим Ігоревич, Белозьорова Вікторія Володимирівна
Формула / Реферат
Мікропроцесорна система керування тяговою передачею локомотива, що містить мікропроцесорний блок з головним мікропроцесором, який працює за критерієм ковзання, блок керування тяговими електродвигунами, блок опрацювання сигналів датчиків, блок діагностичних пристроїв та блок визначення лінійної швидкості, що містить радар, працюючий на ефекті Доплера, яка відрізняється тим, що мікропроцесорний блок з головним мікропроцесором використовує критерій зчеплення, систему також споряджено блоком керування тиском повітря в гальмових циліндрах та блоком керування подачею піску.
Текст
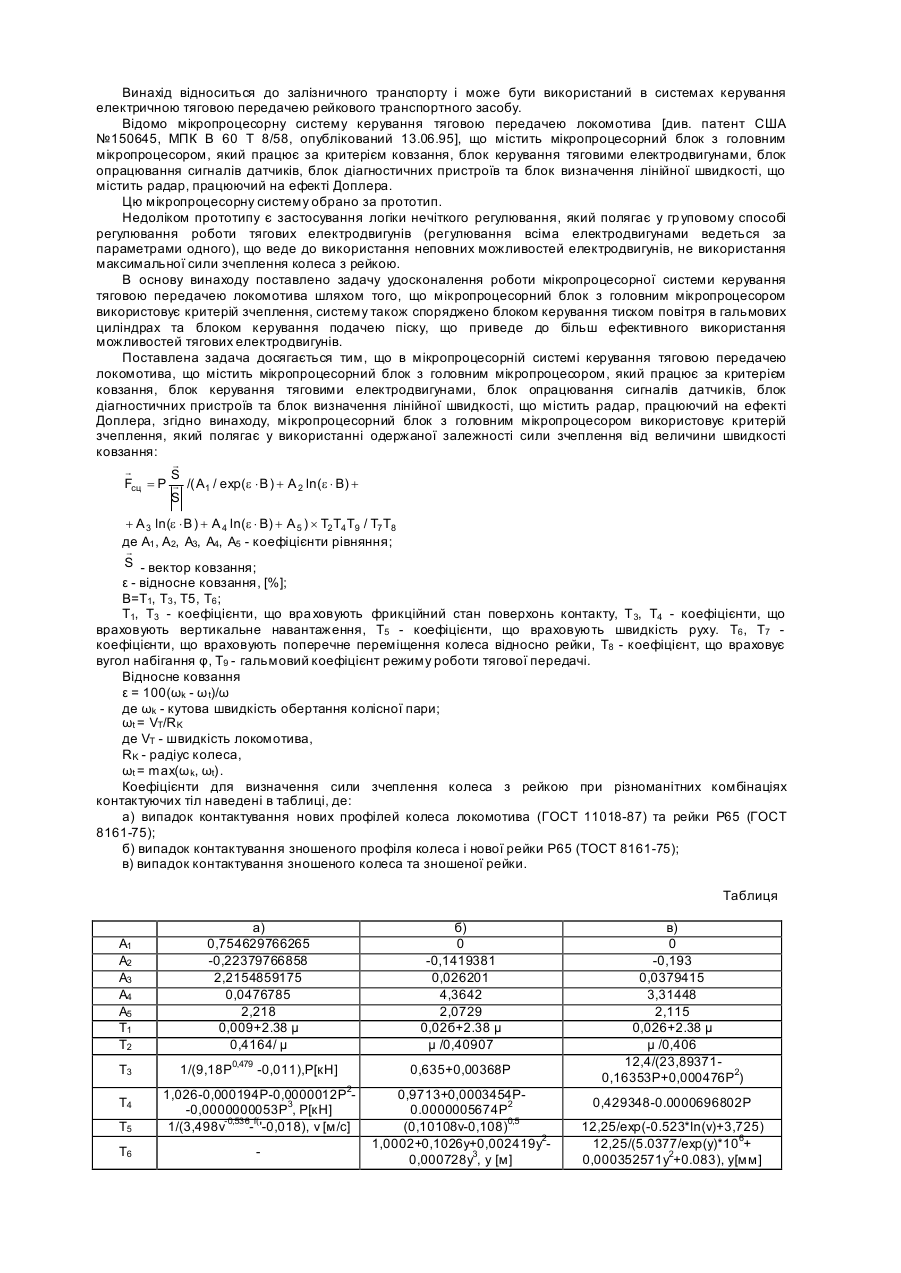
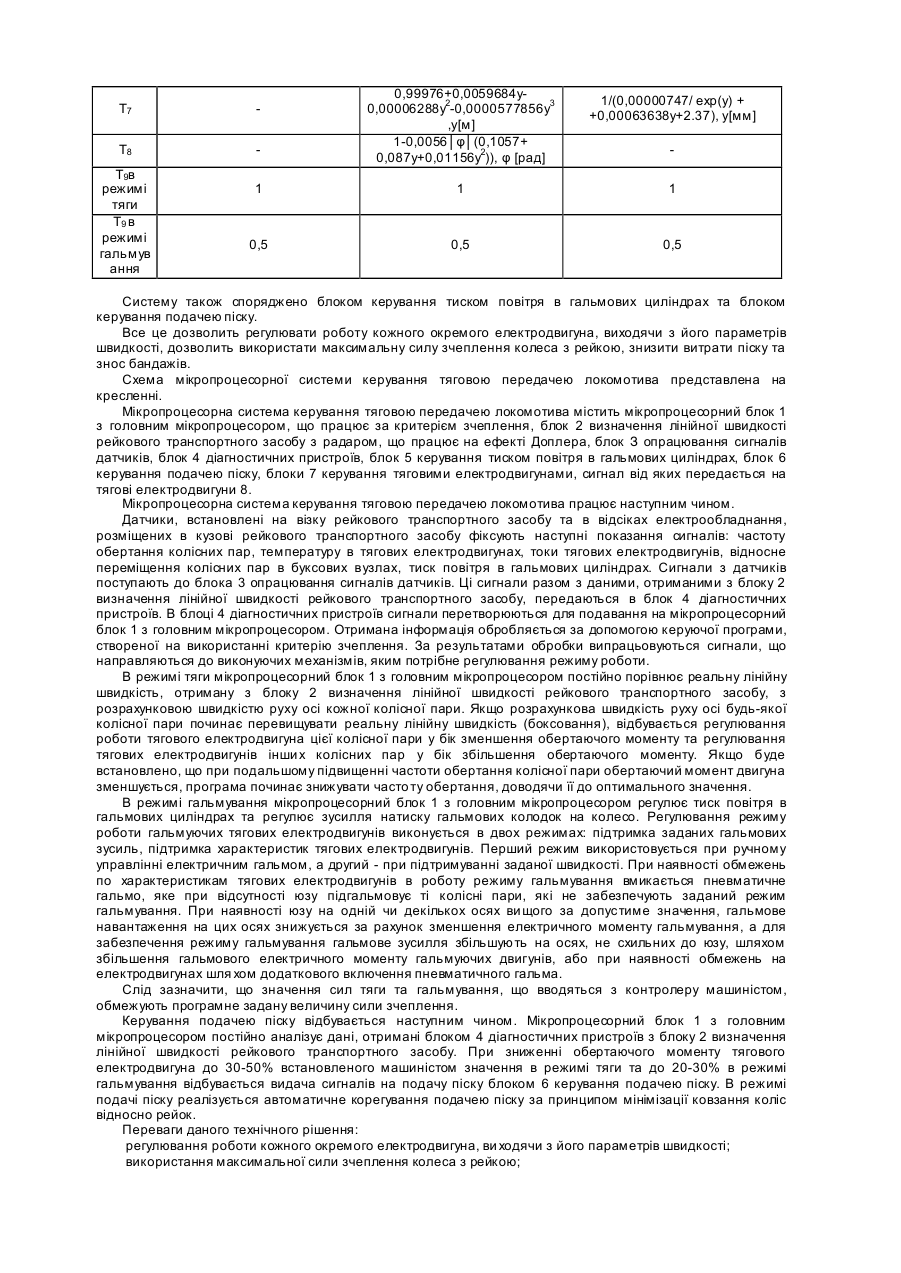
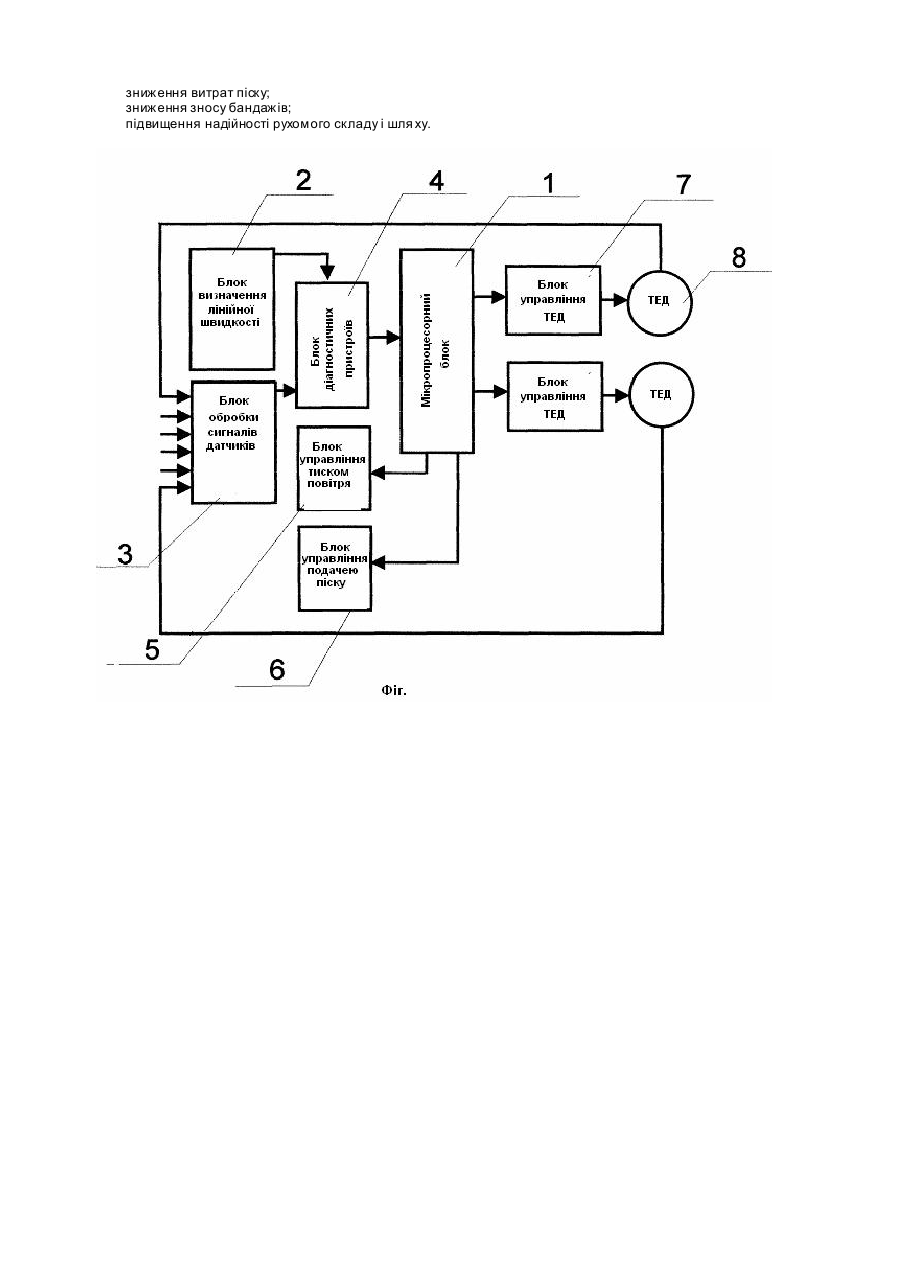
Винахід відноситься до залізничного транспорту і може бути використаний в системах керування електричною тяговою передачею рейкового транспортного засобу. Відомо мікропроцесорну систему керування тяговою передачею локомотива [див. патент США №150645, МПК B 60 T 8/58, опублікований 13.06.95], що містить мікропроцесорний блок з головним мікропроцесором, який працює за критерієм ковзання, блок керування тяговими електродвигунами, блок опрацювання сигналів датчиків, блок діагностичних пристроїв та блок визначення лінійної швидкості, що містить радар, працюючий на ефекті Доплера. Цю мікропроцесорну систему обрано за прототип. Недоліком прототипу є застосування логіки нечіткого регулювання, який полягає у гр уповому способі регулювання роботи тягових електродвигунів (регулювання всіма електродвигунами ведеться за параметрами одного), що веде до використання неповних можливостей електродвигунів, не використання максимальної сили зчеплення колеса з рейкою. В основу винаходу поставлено задачу удосконалення роботи мікропроцесорної системи керування тяговою передачею локомотива шляхом того, що мікропроцесорний блок з головним мікропроцесором використовує критерій зчеплення, систему також споряджено блоком керування тиском повітря в гальмових циліндрах та блоком керування подачею піску, що приведе до більш ефективного використання можливостей тягових електродвигунів. Поставлена задача досягається тим, що в мікропроцесорній системі керування тяговою передачею локомотива, що містить мікропроцесорний блок з головним мікропроцесором, який працює за критерієм ковзання, блок керування тяговими електродвигунами, блок опрацювання сигналів датчиків, блок діагностичних пристроїв та блок визначення лінійної швидкості, що містить радар, працюючий на ефекті Доплера, згідно винаходу, мікропроцесорний блок з головним мікропроцесором використовує критерій зчеплення, який полягає у використанні одержаної залежності сили зчеплення від величини швидкості ковзання: r r S Fсц = P r /( A1 / exp(e × B ) + A 2 ln(e × B) + S + A 3 ln(e × B ) + A 4 ln(e × B) + A 5 ) ´ T2 T4 T9 / T7 T8 де A1 , А2, А3, А4, А5 - коефіцієнти рівняння; r S - вектор ковзання; ε - відносне ковзання, [%]; В=Т1, Т3 , Т5, Т6 ; Т1, Т3 - коефіцієнти, що вра ховують фрикційний стан поверхонь контакту, Т 3, T4 - коефіцієнти, що враховують вертикальне навантаження, T5 - коефіцієнти, що враховують швидкість руху. Т6 , T7 коефіцієнти, що враховують поперечне переміщення колеса відносно рейки, T8 - коефіцієнт, що враховує вугол набігання φ, Т9 - гальмовий коефіцієнт режиму роботи тягової передачі. Відносне ковзання ε = 100(ωk - ω t)/ω де ωk - кутова швидкість обертання колісної пари; ωt = VT/RK де VT - швидкість локомотива, RK - радіус колеса, ωt = max(ω k, ωt). Коефіцієнти для визначення сили зчеплення колеса з рейкою при різноманітних комбінаціях контактуючих тіл наведені в таблиці, де: а) випадок контактування нових профілей колеса локомотива (ГОСТ 11018-87) та рейки Р65 (ГОСТ 8161-75); б) випадок контактування зношеного профіля колеса і нової рейки Р65 (ТОСТ 8161-75); в) випадок контактування зношеного колеса та зношеної рейки. Таблиця А1 А2 А3 А4 A5 Т1 Т2 а) 0,754629766265 -0,22379766858 2,2154859175 0,0476785 2,218 0,009+2.38 μ 0,4164/ μ Т3 б) 0 -0,1419381 0,026201 4,3642 2,0729 0,02б+2.38 μ μ /0,40907 1/(9,18P0,479 -0,011),P[кН] 0,635+0,00368Р 2 Т5 1,026-0,000194P-0,0000012P -0,0000000053P3, Р[кН] 1/(3,498v-0,536-f('-0,018), v [м/с] Т6 Т4 0,9713+0,0003454Р0.0000005674Р2 (0,10108v-0,108)0,5 1,0002+0,1026у+0,002419у20,000728у3, у [м] в) 0 -0,193 0,0379415 3,31448 2,115 0,026+2.38 μ μ /0,406 12,4/(23,893710,16353P+0,000476P2) 0,429348-0.0000696802P 12,25/exp(-0.523*ln(v)+3,725) 12,25/(5.0377/exp(y)*106+ 0,000352571y2+0.083), у[мм] 0,99976+0,0059684у0,00006288у2-0,0000577856у3 ,у[м] 1-0,0056│φ│(0,1057+ 0,087у+0,01156у2)), φ [рад] 1/(0,00000747/ ехр(у) + +0,00063638у+2.37), у[мм] 1 1 1 0,5 0,5 0,5 Т7 T8 T9в режимі тяги T9 в режимі гальмув ання Систему також споряджено блоком керування тиском повітря в гальмових циліндрах та блоком керування подачею піску. Все це дозволить регулювати роботу кожного окремого електродвигуна, виходячи з його параметрів швидкості, дозволить використати максимальну силу зчеплення колеса з рейкою, знизити витрати піску та знос бандажів. Схема мікропроцесорної системи керування тяговою передачею локомотива представлена на кресленні. Мікропроцесорна система керування тяговою передачею локомотива містить мікропроцесорний блок 1 з головним мікропроцесором, що працює за критерієм зчеплення, блок 2 визначення лінійної швидкості рейкового транспортного засобу з радаром, що працює на ефекті Доплера, блок З опрацювання сигналів датчиків, блок 4 діагностичних пристроїв, блок 5 керування тиском повітря в гальмових циліндрах, блок 6 керування подачею піску, блоки 7 керування тяговими електродвигунами, сигнал від яких передається на тягові електродвигуни 8. Мікропроцесорна система керування тяговою передачею локомотива працює наступним чином. Датчики, встановлені на візку рейкового транспортного засобу та в відсіках електрообладнання, розміщених в кузові рейкового транспортного засобу фіксують наступні показання сигналів: частоту обертання колісних пар, температуру в тягових електродвигунах, токи тягових електродвигунів, відносне переміщення колісних пар в буксових вузлах, тиск повітря в гальмових циліндрах. Сигнали з датчиків поступають до блока 3 опрацювання сигналів датчиків. Ці сигнали разом з даними, отриманими з блоку 2 визначення лінійної швидкості рейкового транспортного засобу, передаються в блок 4 діагностичних пристроїв. В блоці 4 діагностичних пристроїв сигнали перетворюються для подавання на мікропроцесорний блок 1 з головним мікропроцесором. Отримана інформація обробляється за допомогою керуючої програми, створеної на використанні критерію зчеплення. За результатами обробки випрацьовуються сигнали, що направляються до виконуючих механізмів, яким потрібне регулювання режиму роботи. В режимі тяги мікропроцесорний блок 1 з головним мікропроцесором постійно порівнює реальну лінійну швидкість, отриману з блоку 2 визначення лінійної швидкості рейкового транспортного засобу, з розрахунковою швидкістю руху осі кожної колісної пари. Якщо розрахункова швидкість руху осі будь-якої колісної пари починає перевищувати реальну лінійну швидкість (боксовання), відбувається регулювання роботи тягового електродвигуна цієї колісної пари у бік зменшення обертаючого моменту та регулювання тягових електродвигунів інши х колісних пар у бік збільшення обертаючого моменту. Якщо буде встановлено, що при подальшому підвищенні частоти обертання колісної пари обертаючий момент двигуна зменшується, програма починає знижувати часто ту обертання, доводячи її до оптимального значення. В режимі гальмування мікропроцесорний блок 1 з головним мікропроцесором регулює тиск повітря в гальмових циліндрах та регулює зусилля натиску гальмових колодок на колесо. Регулювання режиму роботи гальмуючих тягових електродвигунів виконується в двох режимах: підтримка заданих гальмових зусиль, підтримка характеристик тягових електродвигунів. Перший режим використовується при ручному управлінні електричним гальмом, а другий - при підтримуванні заданої швидкості. При наявності обмежень по характеристикам тягових електродвигунів в роботу режиму гальмування вмикається пневматичне гальмо, яке при відсутності юзу підгальмовує ті колісні пари, які не забезпечують заданий режим гальмування. При наявності юзу на одній чи декількох осях ви щого за допустиме значення, гальмове навантаження на цих осях знижується за рахунок зменшення електричного моменту гальмування, а для забезпечення режиму гальмування гальмове зусилля збільшують на осях, не схильних до юзу, шляхом збільшення гальмового електричного моменту гальмуючих двигунів, або при наявності обмежень на електродвигунах шля хом додаткового включення пневматичного гальма. Слід зазначити, що значення сил тяги та гальмування, що вводяться з контролеру машиністом, обмежують програмне задану величину сили зчеплення. Керування подачею піску відбувається наступним чином. Мікропроцесорний блок 1 з головним мікропроцесором постійно аналізує дані, отримані блоком 4 діагностичних пристроїв з блоку 2 визначення лінійної швидкості рейкового транспортного засобу. При зниженні обертаючого моменту тягового електродвигуна до 30-50% встановленого машиністом значення в режимі тяги та до 20-30% в режимі гальмування відбувається видача сигналів на подачу піску блоком 6 керування подачею піску. В режимі подачі піску реалізується автоматичне корегування подачею піску за принципом мінімізації ковзання коліс відносно рейок. Переваги даного технічного рішення: регулювання роботи кожного окремого електродвигуна, ви ходячи з його параметрів швидкості; використання максимальної сили зчеплення колеса з рейкою; зниження витрат піску; зниження зносу бандажів; підвищення надійності рухомого складу і шля ху.
ДивитисяДодаткова інформація
Назва патенту англійськоюMicroprocessor system of control of traction transmission of a locomotive
Автори англійськоюSpiriahin Maksym Ihorovych, Spiriahin Valentyn Ihorovych, Horbunov Mykola Ivanovych, Kashura Oleksandr Leonidovych
Назва патенту російськоюМикропроцессорная система управления тяговой передачей локомотива
Автори російськоюСпирягин Максим Игоревич, Спирягин Валентин Игоревич, Горбунов Николай Иванович, Кашура Александр Леонидович
МПК / Мітки
МПК: B60T 8/58
Мітки: система, тяговою, мікропроцесорна, передачею, локомотива, керування
Код посилання
<a href="https://ua.patents.su/3-65187-mikroprocesorna-sistema-keruvannya-tyagovoyu-peredacheyu-lokomotiva.html" target="_blank" rel="follow" title="База патентів України">Мікропроцесорна система керування тяговою передачею локомотива</a>
Система гальм залізничного транспортного засобу з тяговою та причіпною одиницями
Номер патенту: 5330
Опубліковано: 28.12.1994
Автори: Смєлов Владімір Ніколаєвіч, Козюлін Лев Васільєвіч, Дмітрієв Євгеній Сергєєвіч, Петров Ніколай Ніколаєвіч, Беляков Ніколай Івановіч, Бунаков Ніколай Сергєєвіч
МПК: B60T 15/60
Мітки: тяговою, одиницями, транспортного, система, причіпною, залізничного, гальм, засобу
Формула / Реферат:
Тормозная система железнодорожного транспортного средства с тяговой и прицепной единицами, преимущественно путевой машины, содержащая кран машиниста, с управляющим органом прямодействующего тормоза, установленный на тяговой единице, реле давления, размещенные на тяговой и прицепной единицах, соединенные посредством переключательных клапанов с управляющим органом крана, и электропневматические вентили, расположенные на тяговой и прицепной...
Форсунка пісочної системи локомотива
Номер патенту: 38096
Опубліковано: 15.05.2001
Автори: Спірягін Максим Ігорович, Горбунов Микола Іванович, Ігнатьєв Олег Леонідович, Спірягін Валентин Ігорович, Тасанг Ерік Хельмутович, Міхєєв Олександр Сергійович
МПК: B61C 15/00
Мітки: форсунка, системі, пісочної, локомотива
Формула / Реферат:
1. Форсунка пісочної системи локомотива, що містить корпус з вхідним і вихідним коліном для подачі піскоповітряної суміші до колеса локомотива, сопло, штуцер та пружно-еластичну мембрану, яка відрізняється тим, що з пружноеластичною мембраною з'єднано стрижень-сердечник електромагнітної котушки, котрий в залежності від інтенсивності боксування втягується всередину котушки, збільшуючи зазор між зрізом патрубка і...
Система керування електровозом арп 8т
Номер патенту: 63081
Опубліковано: 15.01.2004
Автори: Вакульчик Володимир Григорович, Дебелий Володимир Леонідович
МПК: B60F 1/00
Мітки: електровозом, керування, система, арп
Формула / Реферат:
Система керування електровозом, в якій пуск та зупинка електровоза здійснюється шляхом застосування в транзисторному контролері КТВ-1 мікромодулів, які забезпечують плавний пуск, плавне гальмування електровоза, що гарантує обмеження розрядки акумуляторної батареї, захист від перевантажень тягових електродвигунів, а також включає стабілізоване живлення допоміжних ланцюгів за допомогою підключення до акумуляторної батареї, переключення світла...
Буксова підвіcка колісної пари локомотива
Номер патенту: 32976
Опубліковано: 15.05.2002
Автори: Дерюгін Олег Валентинович, Мішин Володимир Васильович
Мітки: підвіcка, пари, локомотива, буксова, колісної
Формула / Реферат:
Буксова підвіска колісної пари локомотива, яка вміщує буксовий вузол, розміщений на колісній парі, і напрямні, з'єднані з рамою локомотива, яка відрізняється тим, що на напрямній закріплені пружний елемент і лижа, на котру в поздовжньому напрямку опирається вертикальна плоска п'ята букси.
Буксове підвішування колісної пари локомотива
Номер патенту: 32976
Опубліковано: 15.02.2001
Автори: Дерюгін Олег Валентинович, Мішин Володимир Васильович
Мітки: колісної, буксове, локомотива, підвішування, пари
Формула / Реферат:
Буксова підвіска колісної пари локомотива, яка вміщує буксовий вузол, розміщений на колісній парі, і напрямні, з'єднані з рамою локомотива, яка відрізняється тим, що на напрямній закріплені пружний елемент і лижа, на котру в поздовжньому напрямку опирається вертикальна плоска п'ята букси.
Попередній патент: Ливарний сплав на основі заліза
Наступний патент: Випарник палива