Антенний пристрій оптимального супроводу космічних апаратів
Номер патенту: 65938
Опубліковано: 15.04.2004
Автори: Подорожняк Андрій Олексійович, Коломійцев Олексій Володимирович, Козелкова Марина Борисівна, Пашков Дмитро Павлович
Формула / Реферат
Антенний пристрій оптимального супроводу космічних апаратів, що містить відбивач, два випромінювачі, фазовий детектор, привід, причому обидва випромінювачі знаходяться у фокусі відбивача, входом системи автосупроводження є перший вхід відбивача, вихід фазового детектора з'єднаний через привід із другим входом відбивача, який відрізняється тим, що з метою підвищення точності введені (n-2) випромінювачі, n приймачів, блок сумарного сигналу, блок різницевого сигналу і пристрій вибору променів, причому (n-2) випромінювачі розташовані у фокусі відбивача, виходи кожного з n випромінювачів приєднані до сигнальних входів окремих n приймачів, вихід кожного з n приймачів підключений до окремого входу пристрою вибору променів, кожний з n керуючих виходів пристрою вибору променів з'єднаний з відповідним керуючим входом кожного з n приймачів, сигнальний вихід пристрою вибору променів підключений до з'єднаних між собою входу блока сумарного сигналу і входу блока різницевого сигналу, вихід блока сумарного сигналу приєднаний до першого входу фазового детектора, вихід блока різницевого сигналу підключений до другого входу фазового детектора.
Текст
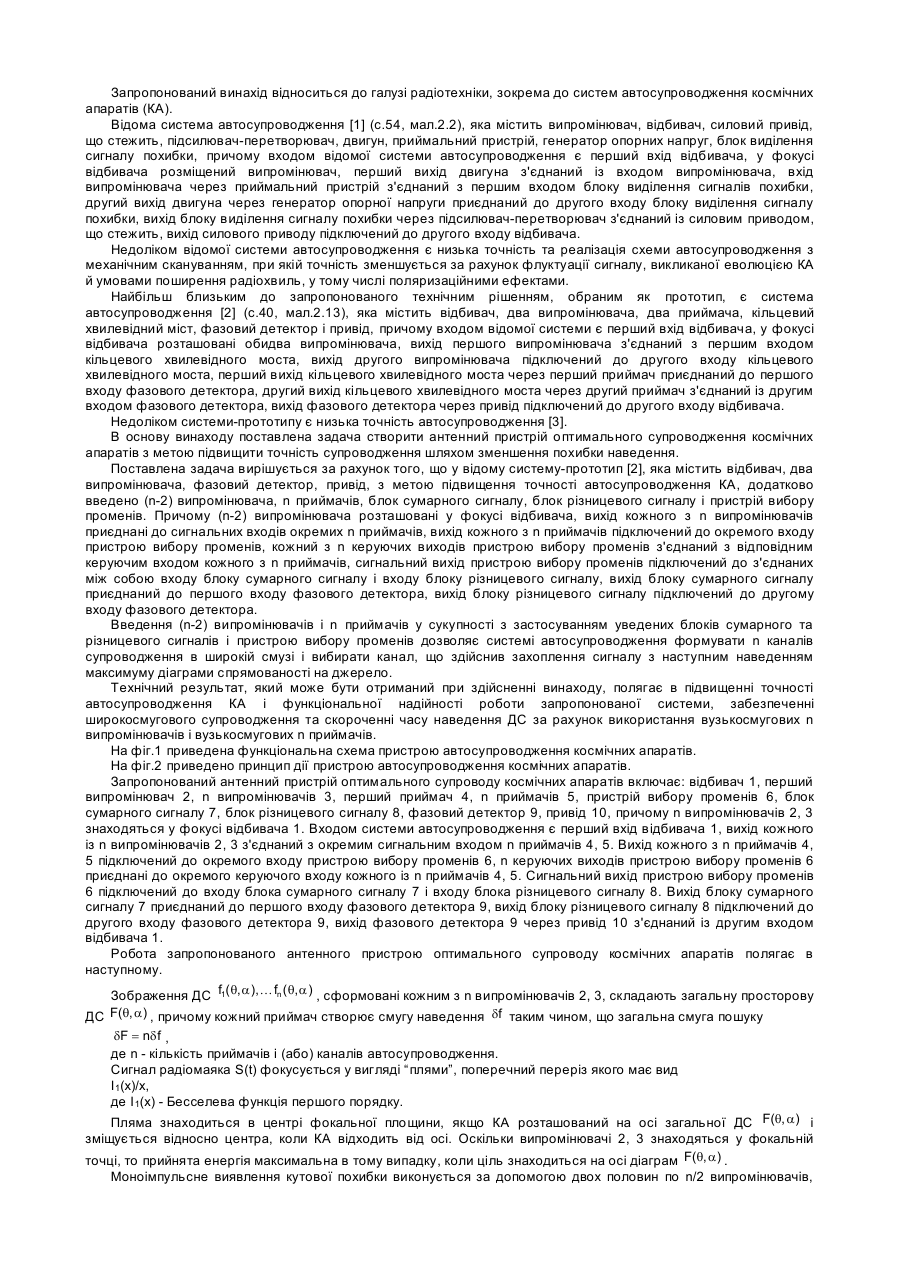
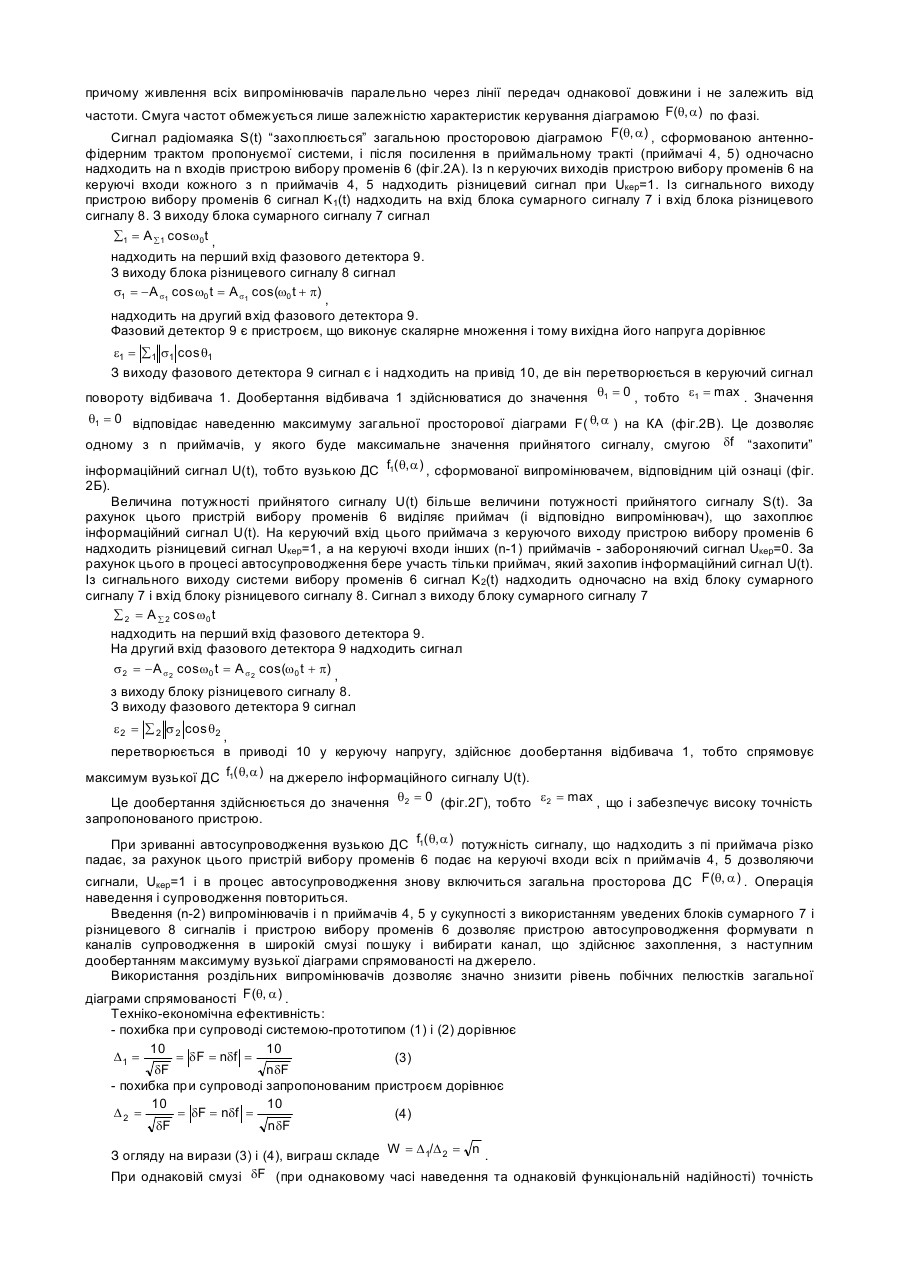
Запропонований винахід відноситься до галузі радіотехніки, зокрема до систем автосупроводження космічних апаратів (КА). Відома система автосупроводження [1] (с.54, мал.2.2), яка містить випромінювач, відбивач, силовий привід, що стежить, підсилювач-перетворювач, двигун, приймальний пристрій, генератор опорних напруг, блок виділення сигналу похибки, причому входом відомої системи автосупроводження є перший вхід відбивача, у фокусі відбивача розміщений випромінювач, перший вихід двигуна з'єднаний із входом випромінювача, вхід випромінювача через приймальний пристрій з'єднаний з першим входом блоку виділення сигналів похибки, другий вихід двигуна через генератор опорної напруги приєднаний до другого входу блоку виділення сигналу похибки, вихід блоку виділення сигналу похибки через підсилювач-перетворювач з'єднаний із силовим приводом, що стежить, вихід силового приводу підключений до другого входу відбивача. Недоліком відомої системи автосупроводження є низька точність та реалізація схеми автосупроводження з механічним скануванням, при якій точність зменшується за рахунок флуктуації сигналу, викликаної еволюцією КА й умовами поширення радіохвиль, у тому числі поляризаційними ефектами. Найбільш близьким до запропонованого технічним рішенням, обраним як прототип, є система автосупроводження [2] (с.40, мал.2.13), яка містить відбивач, два випромінювача, два приймача, кільцевий хвилевідний міст, фазовий детектор і привід, причому входом відомої системи є перший вхід відбивача, у фокусі відбивача розташовані обидва випромінювача, вихід першого випромінювача з'єднаний з першим входом кільцевого хвилевідного моста, вихід другого випромінювача підключений до другого входу кільцевого хвилевідного моста, перший вихід кільцевого хвилевідного моста через перший приймач приєднаний до першого входу фазового детектора, другий вихід кільцевого хвилевідного моста через другий приймач з'єднаний із другим входом фазового детектора, вихід фазового детектора через привід підключений до другого входу відбивача. Недоліком системи-прототипу є низька точність автосупроводження [3]. В основу винаходу поставлена задача створити антенний пристрій оптимального супроводження космічних апаратів з метою підвищити точність супроводження шляхом зменшення похибки наведення. Поставлена задача вирішується за рахунок того, що у відому систему-прототип [2], яка містить відбивач, два випромінювача, фазовий детектор, привід, з метою підвищення точності автосупроводження КА, додатково введено (n-2) випромінювача, n приймачів, блок сумарного сигналу, блок різницевого сигналу і пристрій вибору променів. Причому (n-2) випромінювача розташовані у фокусі відбивача, вихід кожного з n випромінювачів приєднані до сигнальних входів окремих n приймачів, вихід кожного з n приймачів підключений до окремого входу пристрою вибору променів, кожний з n керуючих виходів пристрою вибору променів з'єднаний з відповідним керуючим входом кожного з n приймачів, сигнальний вихід пристрою вибору променів підключений до з'єднаних між собою входу блоку сумарного сигналу і входу блоку різницевого сигналу, вихід блоку сумарного сигналу приєднаний до першого входу фазового детектора, вихід блоку різницевого сигналу підключений до другому входу фазового детектора. Введення (n-2) випромінювачів і n приймачів у сукупності з застосуванням уведених блоків сумарного та різницевого сигналів і пристрою вибору променів дозволяє системі автосупроводження формувати n каналів супроводження в широкій смузі і вибирати канал, що здійснив захоплення сигналу з наступним наведенням максимуму діаграми спрямованості на джерело. Технічний результат, який може бути отриманий при здійсненні винаходу, полягає в підвищенні точності автосупроводження КА і функціональної надійності роботи запропонованої системи, забезпеченні широкосмугового супроводження та скороченні часу наведення ДС за рахунок використання вузькосмугових n випромінювачів і вузькосмугових n приймачів. На фіг.1 приведена функціональна схема пристрою автосупроводження космічних апаратів. На фіг.2 приведено принцип дії пристрою автосупроводження космічних апаратів. Запропонований антенний пристрій оптимального супроводу космічних апаратів включає: відбивач 1, перший випромінювач 2, n випромінювачів 3, перший приймач 4, n приймачів 5, пристрій вибору променів 6, блок сумарного сигналу 7, блок різницевого сигналу 8, фазовий детектор 9, привід 10, причому n випромінювачів 2, 3 знаходяться у фокусі відбивача 1. Входом системи автосупроводження є перший вхід відбивача 1, вихід кожного із n випромінювачів 2, 3 з'єднаний з окремим сигнальним входом n приймачів 4, 5. Вихід кожного з n приймачів 4, 5 підключений до окремого входу пристрою вибору променів 6, n керуючих виходів пристрою вибору променів 6 приєднані до окремого керуючого входу кожного із n приймачів 4, 5. Сигнальний вихід пристрою вибору променів 6 підключений до входу блока сумарного сигналу 7 і входу блока різницевого сигналу 8. Вихід блоку сумарного сигналу 7 приєднаний до першого входу фазового детектора 9, вихід блоку різницевого сигналу 8 підключений до другого входу фазового детектора 9, вихід фазового детектора 9 через привід 10 з'єднаний із другим входом відбивача 1. Робота запропонованого антенного пристрою оптимального супроводу космічних апаратів полягає в наступному. Зображення ДС f1( q, a ), K fn ( q, a ) , сформовані кожним з n випромінювачів 2, 3, складають загальну просторову ДС F(q, a) , причому кожний приймач створює смугу наведення df таким чином, що загальна смуга пошуку dF = nd f , де n - кількість приймачів і (або) каналів автосупроводження. Сигнал радіомаяка S(t) фокусується у вигляді “плями”, поперечний переріз якого має вид І 1(х)/х, де І 1(х) - Бесселева функція першого порядку. Пляма знаходиться в центрі фокальної площини, якщо КА розташований на осі загальної ДС F(q, a) і зміщується відносно центра, коли КА відходить від осі. Оскільки випромінювачі 2, 3 знаходяться у фокальній точці, то прийнята енергія максимальна в тому випадку, коли ціль знаходиться на осі діаграм F(q, a) . Моноімпульсне виявлення кутової похибки виконується за допомогою двох половин по n/2 випромінювачів, причому живлення всіх випромінювачів паралельно через лінії передач однакової довжини і не залежить від частоти. Смуга частот обмежується лише залежністю характеристик керування діаграмою F(q, a) по фазі. Сигнал радіомаяка S(t) “захоплюється” загальною просторовою діаграмою F(q, a) , сформованою антеннофідерним трактом пропонуємої системи, і після посилення в приймальному тракті (приймачі 4, 5) одночасно надходить на n входів пристрою вибору променів 6 (фіг.2А). Із n керуючих виходів пристрою вибору променів 6 на керуючі входи кожного з n приймачів 4, 5 надходить різницевий сигнал при Uкер=1. Із сигнального виходу пристрою вибору променів 6 сигнал K1(t) надходить на вхід блока сумарного сигналу 7 і вхід блока різницевого сигналу 8. З виходу блока сумарного сигналу 7 сигнал å1 = A å1 cos w0t , надходить на перший вхід фазового детектора 9. З виходу блока різницевого сигналу 8 сигнал s1 = - A s1 cos w0 t = A s1 cos(w0 t + p) , надходить на другий вхід фазового детектора 9. Фазовий детектор 9 є пристроєм, що виконує скалярне множення і тому вихідна його напруга дорівнює e1 = å1 s1 cosq1 З виходу фазового детектора 9 сигнал є і надходить на привід 10, де він перетворюється в керуючий сигнал повороту відбивача 1. Дообертання відбивача 1 здійснюватися до значення q1 = 0 , тобто e1 = max . Значення q1 = 0 відповідає наведенню максимуму загальної просторової діаграми F( q, a ) на КА (фіг.2В). Це дозволяє одному з n приймачів, у якого буде максимальне значення прийнятого сигналу, смугою df “захопити” інформаційний сигнал U(t), тобто вузькою ДС f1( q, a ) , сформованої випромінювачем, відповідним цій ознаці (фіг. 2Б). Величина потужності прийнятого сигналу U(t) більше величини потужності прийнятого сигналу S(t). За рахунок цього пристрій вибору променів 6 виділяє приймач (і відповідно випромінювач), що захоплює інформаційний сигнал U(t). На керуючий вхід цього приймача з керуючого виходу пристрою вибору променів 6 надходить різницевий сигнал Uкер=1, а на керуючі входи інших (n-1) приймачів - забороняючий сигнал Uкер=0. За рахунок цього в процесі автосупроводження бере участь тільки приймач, який захопив інформаційний сигнал U(t). Із сигнального виходу системи вибору променів 6 сигнал K 2(t) надходить одночасно на вхід блоку сумарного сигналу 7 і вхід блоку різницевого сигналу 8. Сигнал з виходу блоку сумарного сигналу 7 å 2 = A å 2 cos w0 t надходить на перший вхід фазового детектора 9. На другий вхід фазового детектора 9 надходить сигнал s 2 = - A s2 cos w0 t = A s2 cos(w0 t + p) , з виходу блоку різницевого сигналу 8. З виходу фазового детектора 9 сигнал e 2 = å 2 s 2 cosq2 , перетворюється в приводі 10 у керуючу напругу, здійснює дообертання відбивача 1, тобто спрямовує максимум вузької ДС f1( q, a ) на джерело інформаційного сигналу U(t). Це дообертання здійснюється до значення q2 = 0 (фіг.2Г), тобто e2 = max , що і забезпечує високу точність запропонованого пристрою. При зриванні автосупроводження вузькою ДС f1( q, a ) потужність сигналу, що надходить з пі приймача різко падає, за рахунок цього пристрій вибору променів 6 подає на керуючі входи всіх n приймачів 4, 5 дозволяючи сигнали, Uкер=1 і в процес автосупроводження знову включиться загальна просторова ДС F(q, a ) . Операція наведення і супроводження повториться. Введення (n-2) випромінювачів і n приймачів 4, 5 у сукупності з використанням уведених блоків сумарного 7 і різницевого 8 сигналів і пристрою вибору променів 6 дозволяє пристрою автосупроводження формувати n каналів супроводження в широкій смузі пошуку і вибирати канал, що здійснює захоплення, з наступним дообертанням максимуму вузької діаграми спрямованості на джерело. Використання роздільних випромінювачів дозволяє значно знизити рівень побічних пелюстків загальної діаграми спрямованості F(q, a ) . Техніко-економічна ефективність: - похибка при супроводі системою-прототипом (1) і (2) дорівнює 10 10 D1 = = d F = ndf = (3) dF n dF - похибка при супроводі запропонованим пристроєм дорівнює 10 10 D2 = = dF = ndf = (4) dF n dF З огляду на вирази (3) і (4), виграш складе W = D1/D 2 = n . При однаковій смузі dF (при однаковому часі наведення та однаковій функціональній надійності) точність автосупроводження підвищується в n раз, де n=2, ...,m. Технічна перевага запропонованого винаходу в порівнянні з прототипом полягає в тому, що в n (при n=4 у 2 рази) підвищується точність супроводження КА. Позитивний ефект, який може бути отриманий у випадку використання винаходу полягає в тому, що підвищення точності в n раз супроводження КА дозволяє підвищити надійність роботи супутникової системи зв'язку. ДЖЕРЕЛА ІНФОРМАЦІЇ 1. Белянський П.В., Сергеев Б.Г. Управление наземными антеннами и радиотелескопами. - М.: Сов. радио, 1980. - 280с. 2. Покрас A.M. и др. Системы наведения антенн земных станций спутниковой связи. - М.: Связь, 1978. - 152с. 3. Справочник по радиолокации / Пер. с англ. Под ред. М.М. Вейсбейна. Т.4. - М.: Сов. радио, 1973. - 367с.
ДивитисяДодаткова інформація
Назва патенту англійськоюAerial unit for optimum tracking of spacecrafts
Автори англійськоюKozelkova Maryna Borysivna, Kolomiitsev Oleksii Volodymyrovych, Pashkov Dmytro Pavlovych, Podorozhniak Andrii Oleksiiovych
Назва патенту російськоюАнтенное устройство оптимального сопровождения космических аппаратов
Автори російськоюКозелкова Марина Борисовна, Коломийцев Алексей Владимирович, Пашков Дмитрий Павлович, Подорожняк Андрей Алексеевич
МПК / Мітки
МПК: H01Q 3/08
Мітки: антенний, космічних, апаратів, пристрій, супроводу, оптимального
Код посилання
<a href="https://ua.patents.su/3-65938-antennijj-pristrijj-optimalnogo-suprovodu-kosmichnikh-aparativ.html" target="_blank" rel="follow" title="База патентів України">Антенний пристрій оптимального супроводу космічних апаратів</a>
Адаптивний пристрій супроводу маневруючих цілей

Номер патенту: 56074
Опубліковано: 15.04.2003
Автори: Коваль Олександр Андрійович, Яровий Сергій Володимирович, Челпанов Артем Володимирович, Пащенко Руслан Едуардович, Сірик Юрій Анатолійович, Карлов Володимир Дмитрийович
МПК: G01S 13/00, G01S 13/52
Мітки: маневруючих, цілей, пристрій, супроводу, адаптивний
Формула / Реферат:
Адаптивний пристрій супроводу маневруючих цілей, що містить послідовно з'єднані блоки фільтра Калмана другого порядку, фільтра Калмана третього порядку і комутатор, який відрізняється тим, що додатково введені блок виявлення маневру і блок оцінки інтенсивності маневру, причому блок виявлення маневру складається із послідовно з'єднаних блока формування вибірок, блока обчислення рангу, блока обчислення рангової статистики і порогового блока, а...
Спосіб визначення орбіт навігаційних космічних апаратів
Номер патенту: 36808
Опубліковано: 16.04.2001
Автори: Голкіна Валентина Василівна, Голкін Дмитро Васильович, Деденок Віктор Петрович, Бутенко Ольга Станіславівна
МПК: G01S 5/00
Мітки: навігаційних, космічних, визначення, спосіб, орбіт, апаратів
Текст:
...Врахуємо тепер, що у випадку незалежних і рівноточних вимірів (4) Kr=sr2×І де І - одинична матриця (МхМ); sr2 - дисперсія помилок одиничних вимірів різності дальностей в однобазовому вимірювальному комплексі. З ура хуванням (4) рівняння (3) перетворюють до вигляду (5) sr2(AT×А)= (AT×А)×Кр×(AT×А) Домножують ліву і праву частини рівняння (5) зліва і справа на матрицю (AT×А)-1, обернену матриці (AT×А). Остаточно отримують (6) Кр=sr2×(AT×А)-1...
Пристрій обробки сигналу піровідикона

Номер патенту: 47718
Опубліковано: 15.07.2002
Автори: Гой Віталій Миколайович, Кондратов Петро Олександрович, Шклярський Володимир Іванович
МПК: H04N 5/33
Мітки: піровідикона, пристрій, сигналу, обробки
Формула / Реферат:
Пристрій обробки сигналу піровідикона, який містить перший аналого-цифровий перетворювач, блок пам'яті, перший та другий комутатори, різницевий підсилювач, блок синхронізації, цифро-аналоговий перетворювач, причому вхід першого аналого-цифрового перетворювача з'єднаний із входом пристрою, а вихід першого аналого-цифрового перетворювача через другий комутатор під'єднаний до входу блока пам'яті та другого входу першого комутатора, вихід якого є...
Пристрій для контролю ресурсу комутаційних апаратів
Номер патенту: 54157
Опубліковано: 17.02.2003
Автори: Мокін Олександр Борисович, Грабко Володимир Віталійович, Мокін Борис Іванович, Грабко Валентин Володимирович
МПК: G07C 3/10
Мітки: апаратів, контролю, комутаційних, пристрій, ресурсу
Формула / Реферат:
Пристрій для контролю ресурсу комутаційних апаратів, що містить датчик початку комутації, вихід якого підключений до першого входу першого елемента І і через диференціюючий елемент з'єднаний з першим входом другого елемента І, другий вхід якого підключений до виходу першого тригера через перший елемент НІ, перший лічильник імпульсів з'єднаний з виходом першого елемента АБО, перший вхід якого підключений до виходу другого елемента І, а другий...
Пристрій для контролю ресурсу комутаційних апаратів
Номер патенту: 34266
Опубліковано: 15.02.2001
Автор: Грабко Володимир Віталійович
МПК: G07C 3/10
Мітки: ресурсу, пристрій, комутаційних, апаратів, контролю
Текст:
...вимикача при ввімкненні останнього на коротке замикання в електричній мережі, що дає можливість підвищити точність визначення робочого ресурсу високовольтного вимикача. Пристрій для контролю ресурсу комутаційних апаратів пояснюється кресленням, на якому зображена його структурна cxeмa (див фіг.). На схемі: 1 - датчик струму; 2 - перетворювач струму в напругу; 3, 4, 5 - перший, другий і третій компаратори; 6 - другий генератор...
Попередній патент: Спосіб діагностики спадкової схильності до ішемічної хвороби серця
Наступний патент: Диференціальний поляриметр
Випадковий патент: Пристрій для лиття під низьким тиском