Спосіб вимірювання маси (ваги) літаків
Формула / Реферат
Спосіб вимірювання маси (ваги) літаків, що включає вимірювання сил взаємного тяжіння тіл, який відрізняється тим, що вимірювання сил взаємного тяжіння тіл здійснюють в обмеженому об’ємі вимірювання маси (ваги) при відсутності та присутності в ньому літака, визначають абсолютне значення різниці сил тяжіння чутливого елемента гравіметра в об’ємі вимірювання маси (ваги) літаків та перетворюють значення різниці сил тяжіння чутливого елемента гравіметра у значення маси (ваги) літаків.
Текст
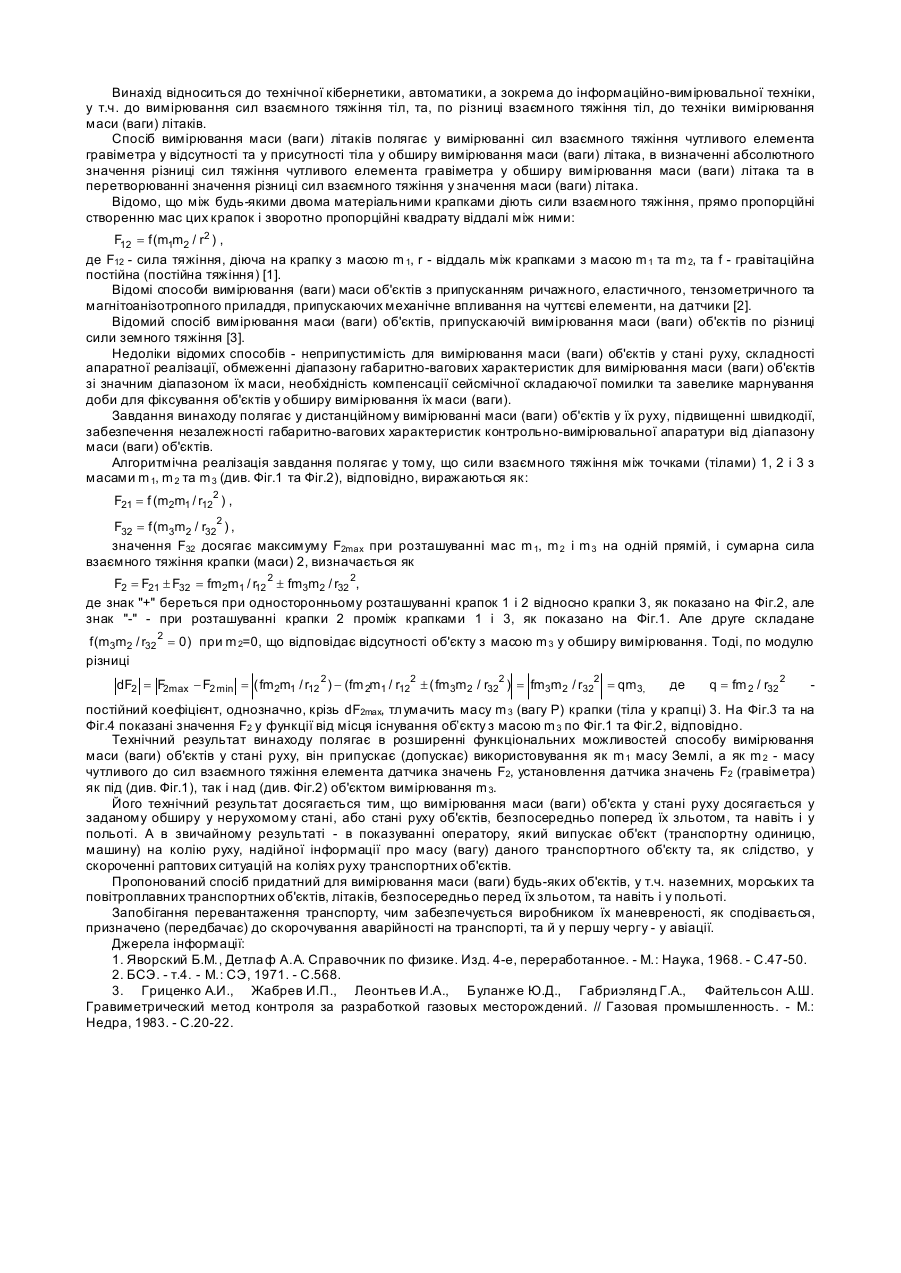
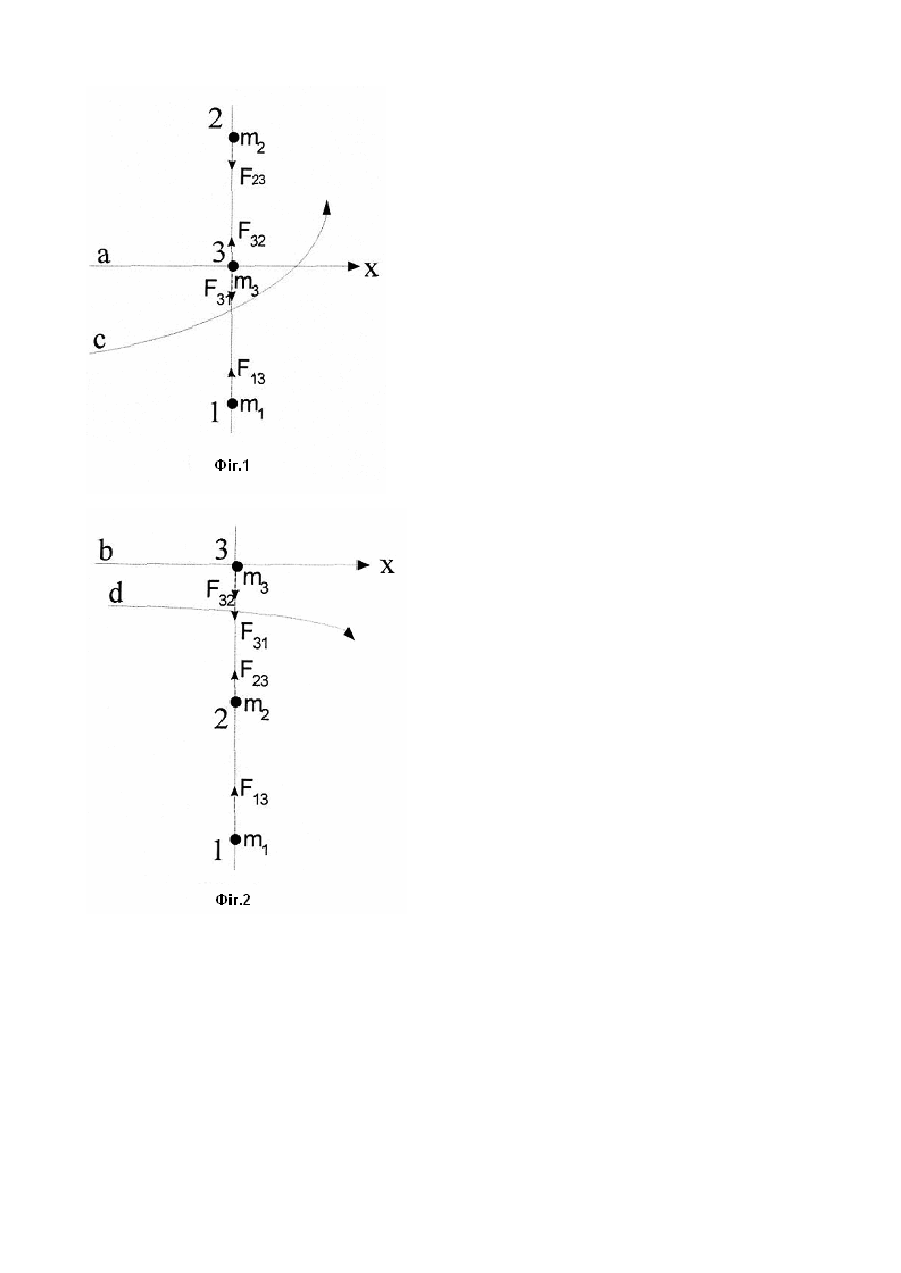
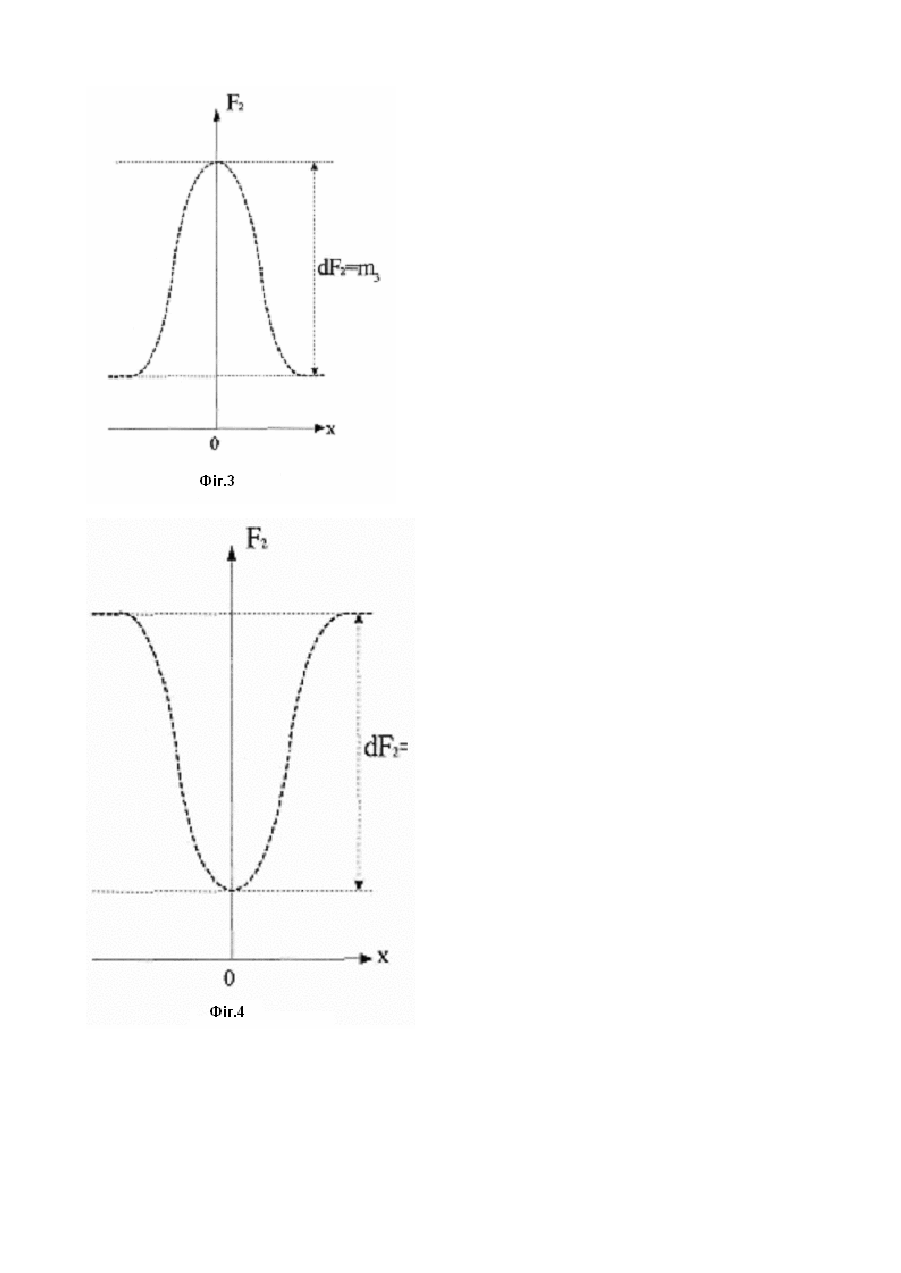
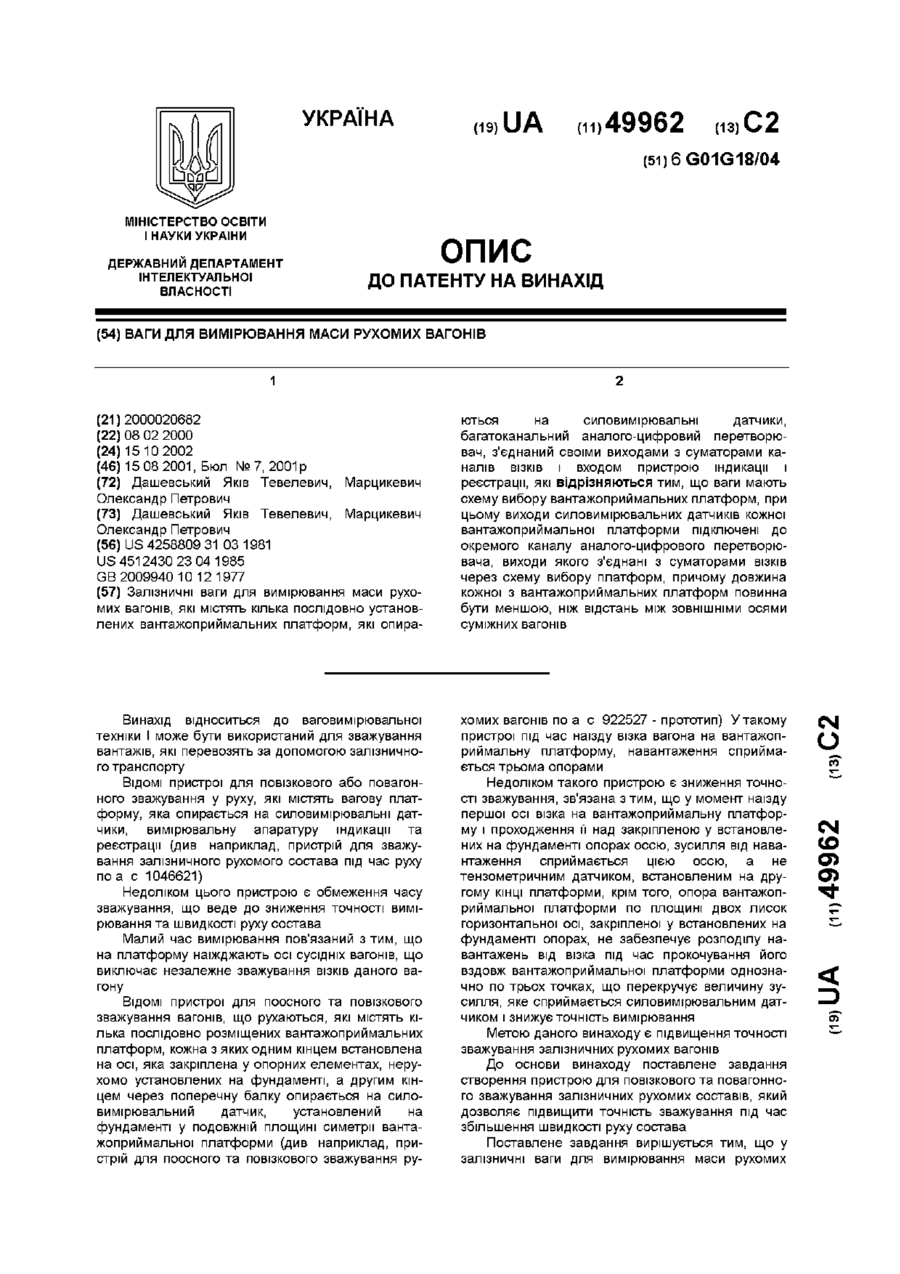
Винахід відноситься до технічної кібернетики, автоматики, а зокрема до інформаційно-вимірювальної техніки, у т.ч. до вимірювання сил взаємного тяжіння тіл, та, по різниці взаємного тяжіння тіл, до техніки вимірювання маси (ваги) літаків. Спосіб вимірювання маси (ваги) літаків полягає у вимірюванні сил взаємного тяжіння чутливого елемента гравіметра у відсутності та у присутності тіла у обширу вимірювання маси (ваги) літака, в визначенні абсолютного значення різниці сил тяжіння чутливого елемента гравіметра у обширу вимірювання маси (ваги) літака та в перетворюванні значення різниці сил взаємного тяжіння у значення маси (ваги) літака. Відомо, що між будь-якими двома матеріальними крапками діють сили взаємного тяжіння, прямо пропорційні створенню мас цих крапок і зворотно пропорційні квадрату віддалі між ними: F = f (m1m2 / r2 ) , 12 де F12 - сила тяжіння, діюча на крапку з масою m 1, r - віддаль між крапками з масою m 1 та m 2, та f - гравітаційна постійна (постійна тяжіння) [1]. Відомі способи вимірювання (ваги) маси об'єктів з припусканням ричажного, еластичного, тензометричного та магнітоанізотропного приладдя, припускаючих механічне впливання на чуттєві елементи, на датчики [2]. Відомий спосіб вимірювання маси (ваги) об'єктів, припускаючій вимірювання маси (ваги) об'єктів по різниці сили земного тяжіння [3]. Недоліки відомих способів - неприпустимість для вимірювання маси (ваги) об'єктів у стані руху, складності апаратної реалізації, обмеженні діапазону габаритно-вагових характеристик для вимірювання маси (ваги) об'єктів зі значним діапазоном їх маси, необхідність компенсації сейсмічної складаючої помилки та завелике марнування доби для фіксування об'єктів у обширу вимірювання їх маси (ваги). Завдання винаходу полягає у дистанційному вимірюванні маси (ваги) об'єктів у їх руху, підвищенні швидкодії, забезпечення незалежності габаритно-вагових характеристик контрольно-вимірювальної апаратури від діапазону маси (ваги) об'єктів. Алгоритмічна реалізація завдання полягає у тому, що сили взаємного тяжіння між точками (тілами) 1, 2 і 3 з масами m 1, m 2 та m 3 (див. Фіг.1 та Фіг.2), відповідно, виражаються як: F21 = f (m2m1 / r122 ) , F32 = f (m3m2 / r322 ) , значення F32 досягає максимуму F2max при розташуванні мас m 1, m 2 і m 3 на одній прямій, і сумарна сила взаємного тяжіння крапки (маси) 2, визначається як F2 = F21 ± F32 = fm2m1 / r12 2 ± fm3m2 / r32 2, де знак "+" береться при односторонньому розташуванні крапок 1 і 2 відносно крапки 3, як показано на Фіг.2, але знак "-" - при розташуванні крапки 2 проміж крапками 1 і 3, як показано на Фіг.1. Але друге складане f (m3m2 / r32 2 = 0) при m 2=0, що відповідає відсутності об'єкту з масою m 3 у обширу вимірювання. Тоді, по модулю різниці 2 2 2 2 dF2 = F2max - F2 min = ( fm2m1 / r12 ) - (fm 2m1 / r12 ± ( fm3m2 / r32 ) = fm3m2 / r32 = qm3, де q fm 2 / r32 2 = постійний коефіцієнт, однозначно, крізь dF2max, тлумачить масу m 3 (вагу Р) крапки (тіла у крапці) 3. На Фіг.3 та на Фіг.4 показані значення F2 у функції від місця існування об’єкту з масою m 3 по Фіг.1 та Фіг.2, відповідно. Технічний результат винаходу полягає в розширенні функціональних можливостей способу вимірювання маси (ваги) об'єктів у стані руху, він припускає (допускає) використовування як m 1 масу Землі, а як m 2 - масу чутливого до сил взаємного тяжіння елемента датчика значень F2, установлення датчика значень F2 (гравіметра) як під (див. Фіг.1), так і над (див. Фіг.2) об'єктом вимірювання m 3. Його технічний результат досягається тим, що вимірювання маси (ваги) об'єкта у стані руху досягається у заданому обширу у нерухомому стані, або стані руху об'єктів, безпосередньо поперед їх зльотом, та навіть і у польоті. А в звичайному результаті - в показуванні оператору, який випускає об'єкт (транспортну одиницю, машину) на колію руху, надійної інформації про масу (вагу) даного транспортного об'єкту та, як слідство, у скороченні раптових ситуацій на коліях руху транспортних об'єктів. Пропонований спосіб придатний для вимірювання маси (ваги) будь-яких об'єктів, у т.ч. наземних, морських та повітроплавних транспортних об'єктів, літаків, безпосередньо перед їх зльотом, та навіть і у польоті. Запобігання перевантаження транспорту, чим забезпечується виробником їх маневреності, як сподівається, призначено (передбачає) до скорочування аварійності на транспорті, та й у першу чергу - у авіації. Джерела інформації: 1. Яворский Б.М., Детла ф А.А. Справочник по физике. Изд. 4-е, переработанное. - М.: Наука, 1968. - С.47-50. 2. БСЭ. - т.4. - М.: СЭ, 1971. - С.568. 3. Гриценко А.И., Жабрев И.П., Леонтьев И.А., Буланже Ю.Д., Габриэлянд Г.А., Файтельсон А.Ш. Гравиметрический метод контроля за разработкой газовых месторождений. // Газовая промышленность. - М.: Недра, 1983. - С.20-22.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of determining weight of an aircraft
Назва патенту російськоюСпособ определения массы самолета
Автори російськоюСкубилин Михаил Демьянович
МПК / Мітки
МПК: G01R 29/12, G01G 19/07
Мітки: спосіб, вимірювання, літаків, маси, ваги
Код посилання
<a href="https://ua.patents.su/3-66239-sposib-vimiryuvannya-masi-vagi-litakiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання маси (ваги) літаків</a>
Ваги для вимірювання маси рухомих вагонів
Номер патенту: 49962
Опубліковано: 15.10.2002
Автори: Дашевський Яків Тевелевич, Марцикевич Олександр Петрович
МПК: G01G 19/04
Мітки: ваги, вагонів, рухомих, маси, вимірювання
Формула / Реферат:
Залізничні ваги для вимірювання маси рухомих вагонів, які містять кілька послідовно установлених вантажоприймальних платформ, які опираються на силовимірювальні датчики, багатоканальний аналого-цифровий перетворювач, з'єднаний своїми виходами з суматорами каналів візків і входом пристрою індикації і реєстрації, які відрізняються тим, що ваги мають схему вибору вантажоприймальних платформ, при цьому виходи силовимірювальних датчиків кожної...
Спосіб вимірювання аеродинамічних коефіцієнтів повздовжнього руху літаків
Номер патенту: 48566
Опубліковано: 15.08.2002
Автори: Резніченко Володимир Миколайович, Сільвестров Антон Миколайович
МПК: G01M 9/00
Мітки: аеродинамічних, спосіб, коефіцієнтів, руху, повздовжнього, літаків, вимірювання
Формула / Реферат:
Спосіб вимірювання аеродинамічних коефіцієнтів (АДК) повздовжнього руху (ПР) літаків, згідно з яким послідовно у часі ступенево з різною амплітудою змінюють положення керуючого органа літака, реєструють відхилення змінних стану і за умови близькості цих змінних та змінних математичної моделі повздовжнього руху для кожної сходинки або всієї сукупності сходинок керуючого органа визначають оцінки АДК, який відрізняється тим, що по оцінках АДК...
Залізничні ваги для поосного вимірювання маси рухомих вагонів
Номер патенту: 17601
Опубліковано: 06.05.1997
Автор: Дашевський Яків Тевелович
МПК: G01G 19/04
Мітки: залізничні, поосного, вагонів, ваги, вимірювання, маси, рухомих
Формула / Реферат:
Железнодорожные весы для поосного измерения массы вагонов в движении, содержащие грузоприемную платформу, опирающуюся на силоизмерительные датчики, аналого-цифровой преобразователь, соединенный своим выходом через сумматор взвешиваемых осей с входом устройства индикации, формирователи переднего и заднего фронтов сигнала, отличающиеся тем, что выходы силоизмерительных датчиков наезда осе ι, при данном направлении движения вагонов,...
Спосіб вимірювання ваги вантажу
Номер патенту: 53005
Опубліковано: 15.01.2003
Автори: Свирида Віталій Іванович, Шабатура Юрій Васильович
МПК: G01G 19/08
Мітки: ваги, вантажу, спосіб, вимірювання
Формула / Реферат:
Спосіб вимірювання ваги вантажу в транспортному засобі на пневматичному ходу, який полягає у визначенні частотної характеристики, за якою складають математичну модель транспортного засобу, який відрізняється тим, що додатково визначають частотну характеристику й температуру кожної шини транспортного засобу, а також значення атмосферного тиску до і після завантаження, і за результатами цих вимірювань по математичній моделі транспортного...
Спосіб вимірювання ваги на гаку та пристрій для його реалізації
Номер патенту: 21235
Опубліковано: 04.11.1997
Автори: Калужний Богдан Семенович, Рибчич Ілля Йосипович, Мартинчук Анастасія Данилівна, Денис Богдан Дмитрович
МПК: E21B 47/00
Мітки: гаку, пристрій, реалізації, вимірювання, спосіб, ваги
Формула / Реферат:
1. Спосіб вимірювання ваги на гаку, що базується на визначенні величини натягу нерухомого кінця талевої линви, який відрізняється тим, що як пружний чутливий елемент використовують талеву линву, визначають її величину розтягу через кут повороту нерухомого шківа кронблока, для чого перед спуском бурильного інструменту, при відсутності ваги на гаку, фіксують умовний нуль кута повороту, компонують низ бурильної колони з наперед визначеним...
Попередній патент: Труба теплообмінника
Наступний патент: Контретикетка
Випадковий патент: Спосіб підвищення ефективності запліднення in vitro