Спосіб вимірювання аеродинамічних коефіцієнтів повздовжнього руху літаків
Номер патенту: 48566
Опубліковано: 15.08.2002
Автори: Сільвестров Антон Миколайович, Резніченко Володимир Миколайович
Формула / Реферат
Спосіб вимірювання аеродинамічних коефіцієнтів (АДК) повздовжнього руху (ПР) літаків, згідно з яким послідовно у часі ступенево з різною амплітудою змінюють положення керуючого органа літака, реєструють відхилення змінних стану і за умови близькості цих змінних та змінних математичної моделі повздовжнього руху для кожної сходинки або всієї сукупності сходинок керуючого органа визначають оцінки АДК, який відрізняється тим, що по оцінках АДК для окремих різної амплітуди сходинок керуючого органа визначають регресійні залежності цих оцінок від амплітуд відхилень керуючого органа чи будь-якої іншої змінної моделі ПР і за істинні значення оцінок АДК приймають прогнозні значення цих регресійних залежностей в точці нульового значення амплітуди відхилень, яка відповідає координатам заданої траєкторії.
Текст
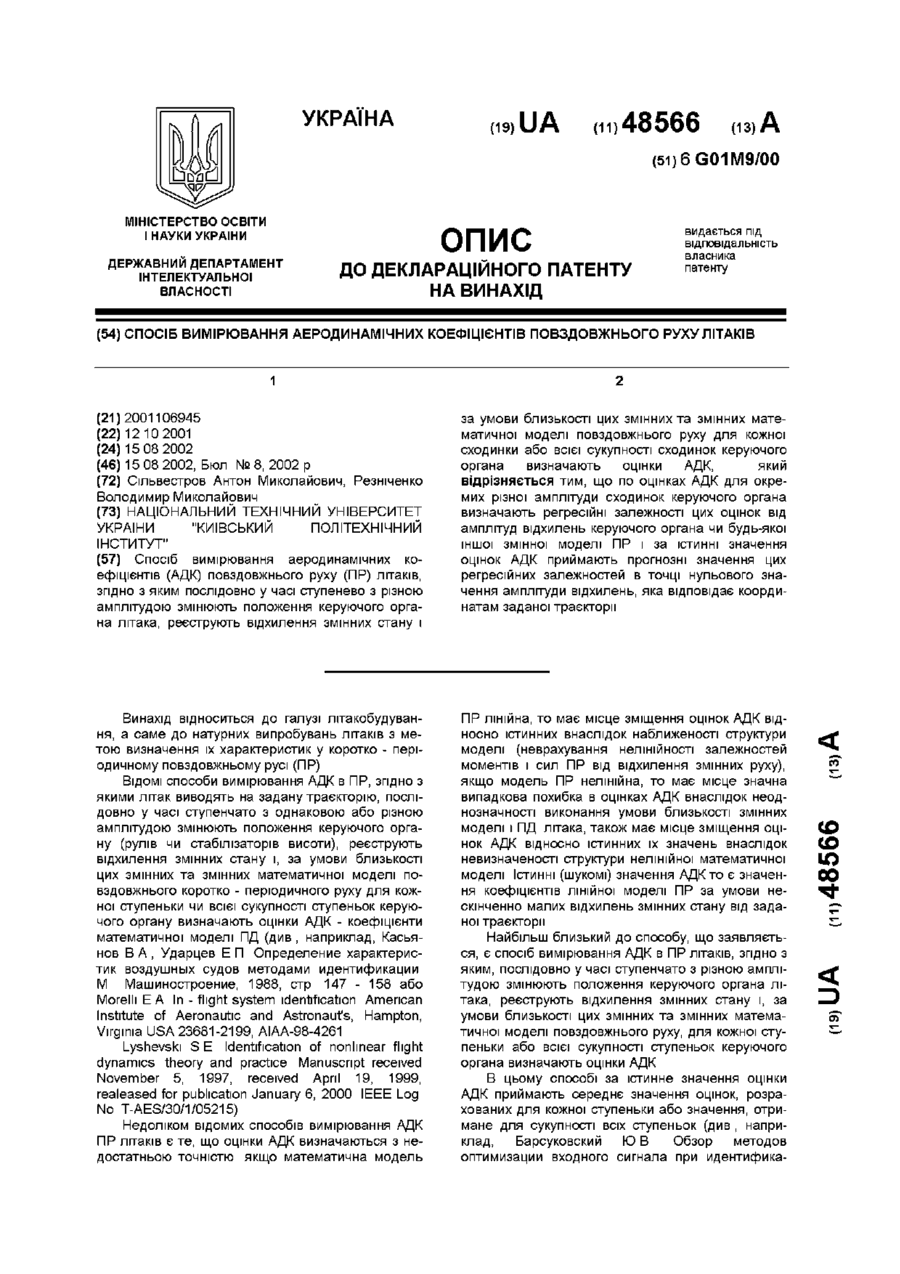
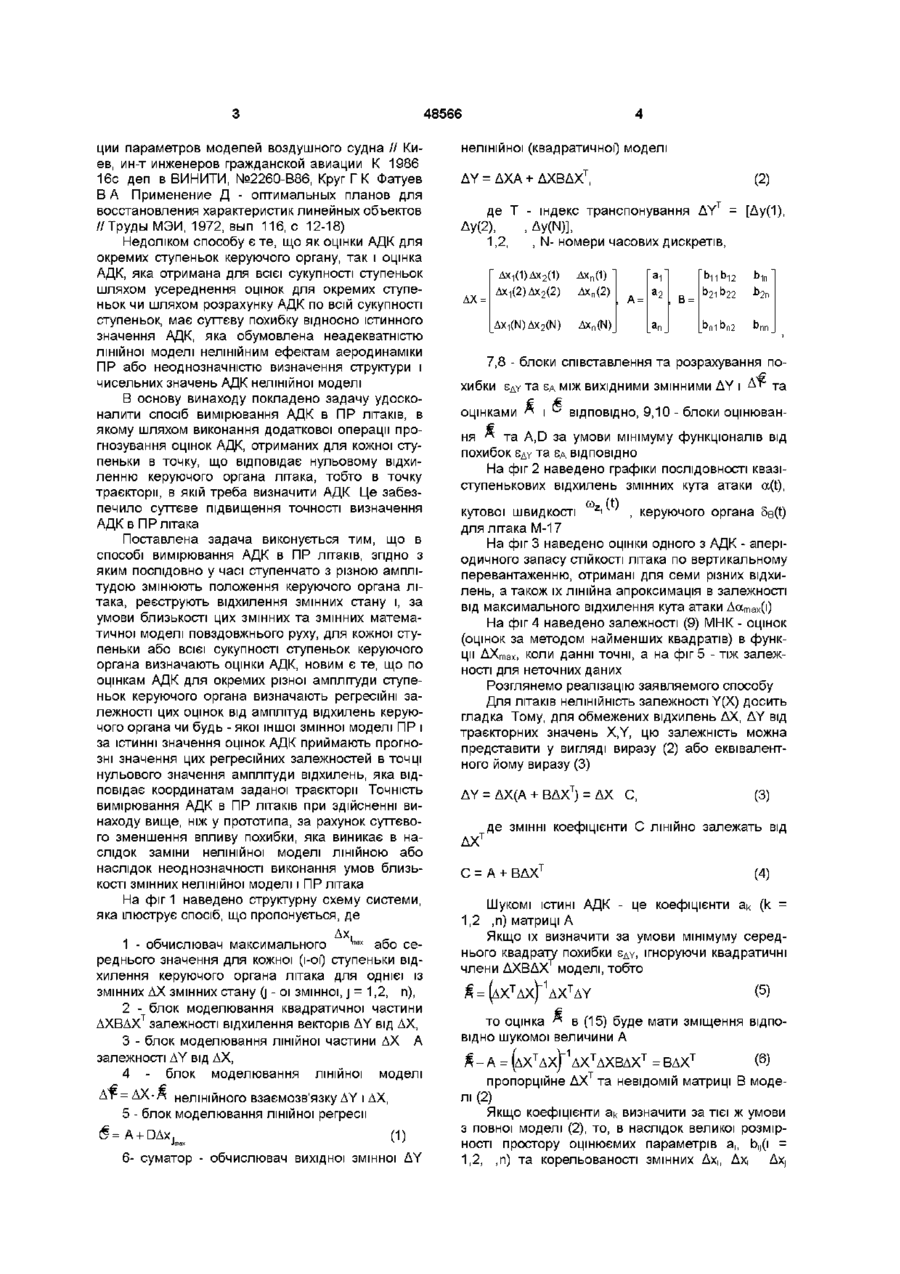
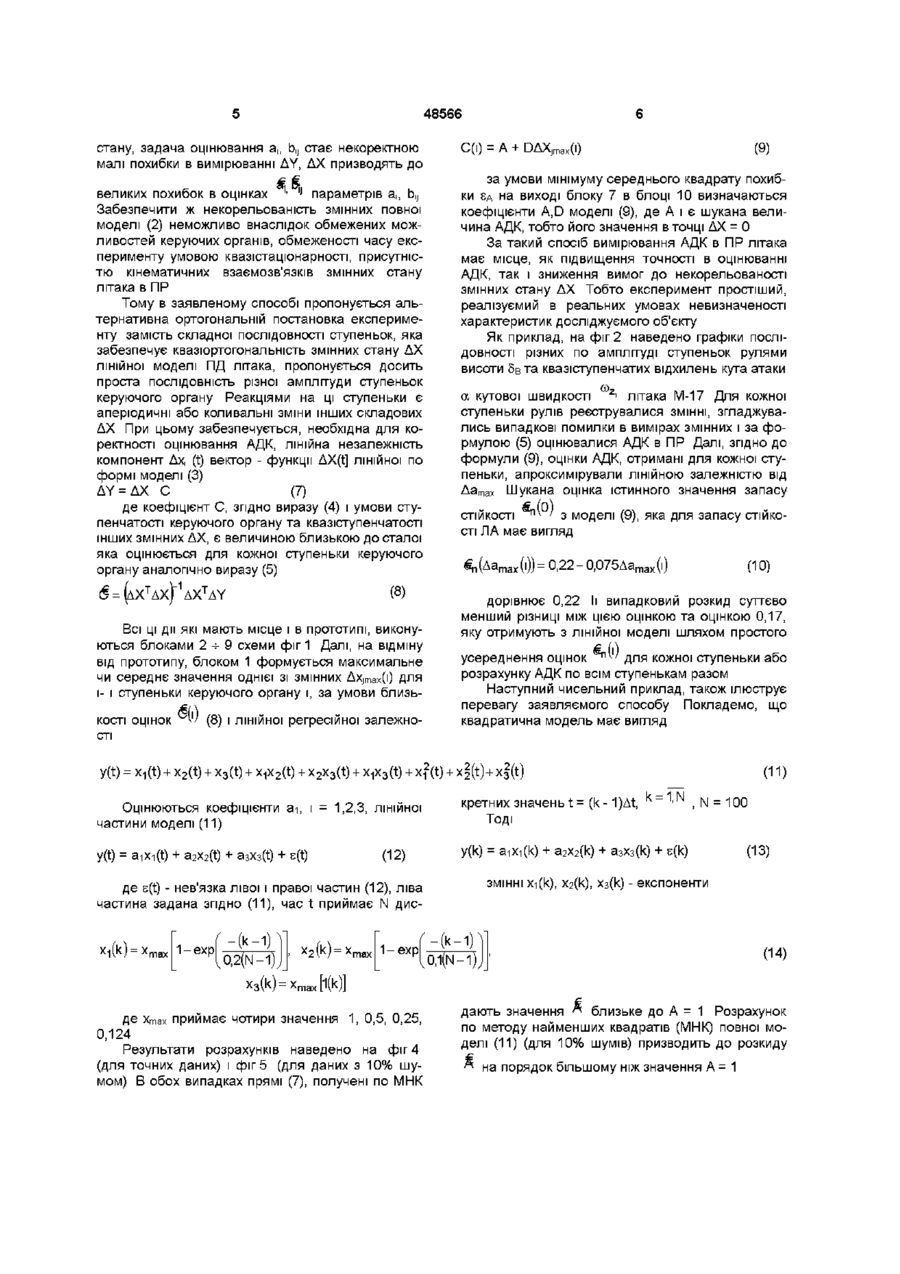
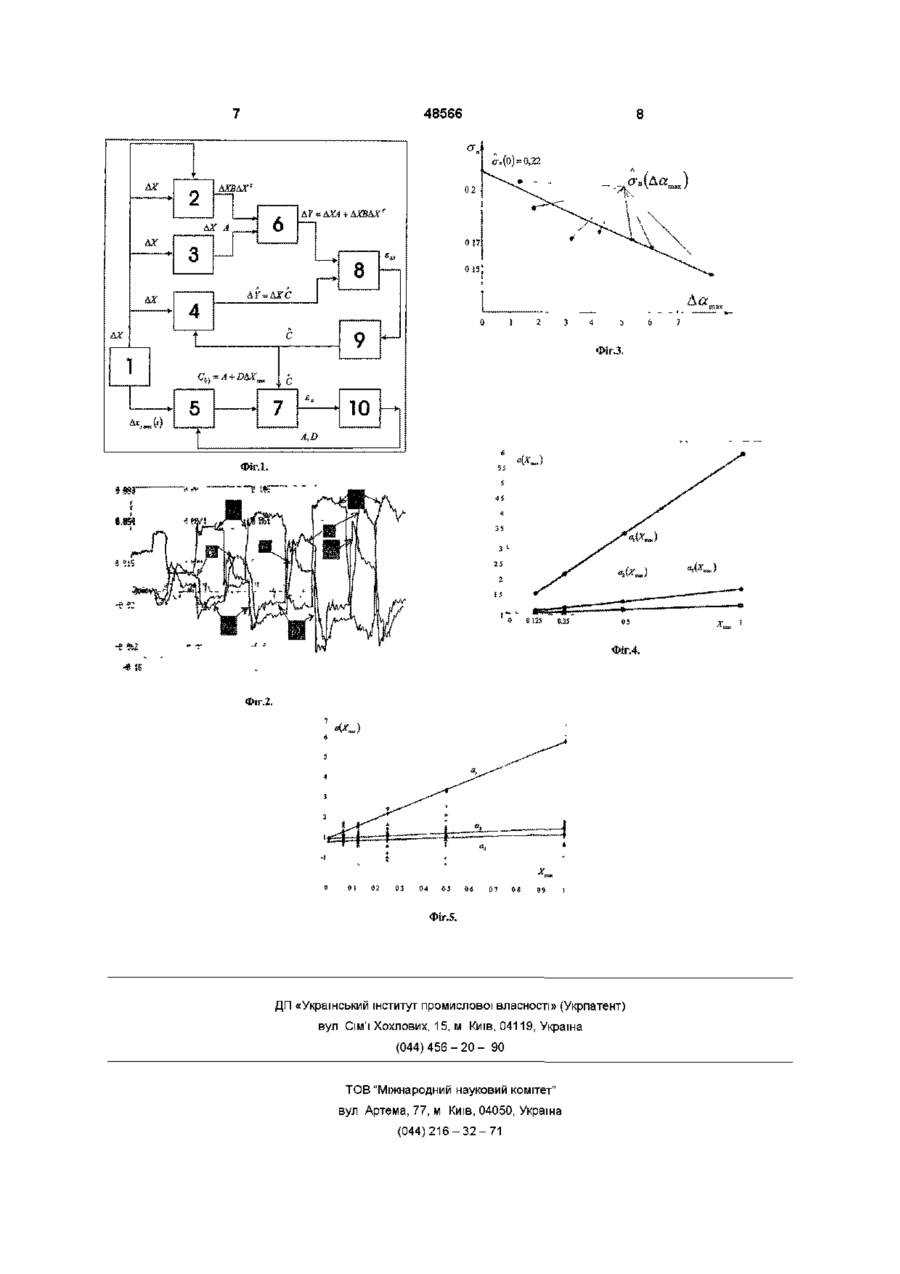
Спосіб вимірювання аеродинамічних коефіцієнтів (АДК) повздовжнього руху (ПР) літаків, згідно з яким послідовно у часі ступенево з різною амплітудою змінюють положення керуючого органа літака, реєструють відхилення змінних стану і Винахід відноситься до галузі літакобудування, а саме до натурних випробувань літаків з метою визначення їх характеристик у коротко - періодичному повздовжньому русі (ПР) ВІДОМІ способи вимірювання АДК в ПР, згідно з якими літак виводять на задану траєкторію, послідовно у часі ступенчато з однаковою або різною амплітудою змінюють положення керуючого органу (рулів чи стабілізаторів висоти), реєструють відхилення змінних стану і, за умови близькості цих змінних та змінних математичної моделі повздовжнього коротко - періодичного руху для кожної ступеньки чи всієї сукупності ступеньок керуючого органу визначають оцінки АДК - коефіцієнти математичної моделі ПД (див , наприклад, Касьянов В А , Ударцев Е П Определение характеристик воздушных судов методами идентификации М Машиностроение, 1988, стр 147 - 158 або МогеІІі Е A In - flight system identification American Institute of Aeronautic and Astronaut's, Hampton, Virginia USA 23681-2199, AIAA-98-4261 Lyshevski S E Identification of nonlinear flight dynamics theory and practice Manuscript received November 5, 1997, received April 19, 1999, realeased for publication January 6, 2000 IEEE Log No T-AES/30/1/05215) Недоліком відомих способів вимірювання АДК ПР літаків є те, що оцінки АДК визначаються з недостатньою точністю якщо математична модель за умови близькості цих змінних та змінних математичної моделі повздовжнього руху для кожної сходинки або всієї сукупності сходинок керуючого органа визначають оцінки АДК, який відрізняється тим, що по оцінках АДК для окремих різної амплітуди сходинок керуючого органа визначають регресійні залежності цих оцінок від амплітуд відхилень керуючого органа чи будь-якої іншої змінної моделі ПР і за ІСТИННІ значення оцінок АДК приймають прогнозні значення цих регресійних залежностей в точці нульового значення амплітуди відхилень, яка відповідає координатам заданої траєкторії ПР лінійна, то має місце зміщення оцінок АДК відносно істинних внаслідок наближеності структури моделі (неврахування нелінійності залежностей моментів і сил ПР від відхилення змінних руху), якщо модель ПР нелінійна, то має місце значна випадкова похибка в оцінках АДК внаслідок неоднозначності виконання умови близькості змінних моделі і ПД літака, також має місце зміщення оцінок АДК відносно істинних їх значень внаслідок невизначеності структури нелінійної математичної моделі Істинні (шукомі) значення АДК то є значення коефіцієнтів лінійної моделі ПР за умови нескінченно малих відхилень змінних стану від заданої траєкторії Найбільш близький до способу, що заявляється, є спосіб вимірювання АДК в ПР літаків, згідно з яким, послідовно у часі ступенчато з різною амплітудою змінюють положення керуючого органа літака, реєструють відхилення змінних стану і, за умови близькості цих змінних та змінних математичної моделі повздовжнього руху, для кожної ступеньки або всієї сукупності ступеньок керуючого органа визначають оцінки АДК В цьому способі за істинне значення оцінки АДК приймають середнє значення оцінок, розрахованих для кожної ступеньки або значення, отримане для сукупності всіх ступеньок (див , наприклад, Барсуковский ЮВ Обзор методов оптимизации входного сигнала при идентифика (О (О ю 00 48566 ции параметров моделей воздушного судна // Киев, ин-т инженеров гражданской авиации К 1986 16с деп в ВИНИТИ, №2260-В86, Круг Г К Фатуев В А Применение Д - оптимальных планов для восстановления характеристик линейных объектов //Труды МЭИ, 1972, вып 116, с 12-18) Недоліком способу є те, що як оцінки АДК для окремих ступеньок керуючого органу, так і оцінка АДК, яка отримана для всієї сукупності ступеньок шляхом усереднення оцінок для окремих ступеньок чи шляхом розрахунку АДК по всій сукупності ступеньок, має суттєву похибку відносно істинного значення АДК, яка обумовлена неадекватністю лінійної моделі нелінійним ефектам аеродинаміки ПР або неоднозначністю визначення структури і чисельних значень АДК нелінійної моделі В основу винаходу покладено задачу удосконалити спосіб вимірювання АДК в ПР літаків, в якому шляхом виконання додаткової операції прогнозування оцінок АДК, отриманих для кожної ступеньки в точку, що відповідає нульовому відхиленню керуючого органа літака, тобто в точку траєкторії, в якій треба визначити АДК Це забезпечило суттєве підвищення точності визначення АДК в ПР літака Поставлена задача виконується тим, що в способі вимірювання АДК в ПР літаків, згідно з яким послідовно у часі ступенчато з різною амплітудою змінюють положення керуючого органа літака, реєструють відхилення змінних стану і, за умови близькості цих змінних та змінних математичної моделі повздовжнього руху, для кожної ступеньки або всієї сукупності ступеньок керуючого органа визначають оцінки АДК, новим є те, що по оцінкам АДК для окремих різної амплітуди ступеньок керуючого органа визначають регресійні залежності цих оцінок від амплітуд відхилень керуючого органа чи будь - якої іншої змінної моделі ПР і за ІСТИННІ значення оцінок АДК приймають прогнозні значення цих регресійних залежностей в точці нульового значення амплітуди відхилень, яка відповідає координатам заданої траєкторії Точність вимірювання АДК в ПР літаків при здійсненні винаходу вище, ніж у прототипа, за рахунок суттєвого зменшення впливу похибки, яка виникає в наслідок заміни нелінійної моделі ЛІНІЙНОЮ або наслідок неоднозначності виконання умов близькості змінних нелінійної моделі і ПР літака На фіг 1 наведено структурну схему системи, яка ілюструє спосіб, що пропонується, де Дх. тах 1 - обчислювач максимального або середнього значення для кожної (І-ОІ) ступеньки відхилення керуючого органа літака для однієї із змінних ДХ змінних стану Q - оі змінної, j = 1,2, п), 2 - блок моделювання квадратичної частини ДХВДХ Т залежності відхилення векторів ДУ від ДХ, 3 - блок моделювання лінійної частини ДХ А залежності ДУ від ДХ, 4 - блок моделювання лінійної моделі Д Т = ДХ-Ж нелінійного взаємозв'язку ДУ і ДХ, 5 - блок моделювання лінійної регресії 6= A + DAxJmax (1) 6- суматор - обчислювач вихідної змінної ДУ нелінійної (квадратичної) моделі ДУ = ДХА+ ДХВДХ' (2) де Т - індекс транспонування ДУ = [Ду(1), Ду(2), , Ду(М)], 1,2, , N- номери часових дискретів, Лхп(1) дх = а1 b Лх п (2) а2 b А = Лх п (М) В= 11b12 b1n 21b22 k2n ап 7,8 - блоки співставлення та розрахування похибки SAY та SA МІЖ ВИХІДНИМИ ЗМІННИМИ ДУ і оцінками ' ня ' й " та і ® ВІДПОВІДНО, 9,10 - блоки оцінюван та A,D за умови мінімуму функціоналів від похибок SAY та SA ВІДПОВІДНО На фіг 2 наведено графіки ПОСЛІДОВНОСТІ квазіступенькових відхилень змінних кута атаки a(t), кутової швидкості ' , керуючого органа 5e(t) для літака М-17 На фіг 3 наведено оцінки одного з АДК - аперіодичного запасу СТІЙКОСТІ літака по вертикальному перевантаженню, отримані для семи різних відхилень, а також їх лінійна апроксимація в залежності від максимального відхилення кута атаки Д а т а х ( і ) На фіг 4 наведено залежності (9) МНК - оцінок (оцінок за методом найменших квадратів) в функції ДХтах, коли данні ТОЧНІ, а на фіг 5 - ТІЖ залежності для неточних даних Розглянемо реалізацію заявляемого способу Для літаків нелінійність залежності У(Х) досить гладка Тому, для обмежених відхилень ДХ, ДУ від траєкторних значень Х,У, цю залежність можна представити у вигляді виразу (2) або еквівалентного йому виразу (3) ДУ = ДХ(А + ВДХ') = ДХ С, де ЗМІННІ коефіцієнти (3) С ЛІНІЙНО залежать від ДХ1 С = А + ВДХ 1 (4) Шукомі ІСТИНІ АДК - це коефіцієнти Эк (к = ,п) матриці А Я К Щ О їх визначити за умови мінімуму середнього квадрату похибки SUY, ігноруючи квадратичні члени ДХВДХ моделі, тобто 1,2 ДХТДУ (5) то оцінка ' в (15) буде мати зміщення ВІДПОВІДНО шукомої величини А %- А = (дхтдх)~1дхтдхвдхт = вдхт (6) пропорційне ДХ Т та невідомій матриці В моделі (2) Якщо коефіцієнти Эк визначити за тієї ж умови з повної моделі (2), то, в наслідок великої розмірності простору оцінюємих параметрів а,, Ь,,(і = 1,2, ,п) та корельованості змінних Дх,, Дх, Дх, 48566 стану, задача оцінювання a,, b,, стає некоректною малі похибки в вимірюванні ДУ, ДХ призводять до и великих похибок в оцінках ' параметрів а,, Ьу Забезпечити ж некорельованість змінних повної моделі (2) неможливо внаслідок обмежених можливостей керуючих органів, обмеженості часу експерименту умовою квазістацюнарності, присутністю кінематичних взаємозв'язків змінних стану літака в ПР Тому в заявленому способі пропонується альтернативна ортогональній постановка експерименту замість складної ПОСЛІДОВНОСТІ ступеньок, яка забезпечує квазюртогональність змінних стану ДХ лінійної моделі ПД літака, пропонується досить проста ПОСЛІДОВНІСТЬ різної амплітуди ступеньок керуючого органу Реакціями на ці ступеньки є аперіодичні або коливальні зміни інших складових ДХ При цьому забезпечується, необхідна для коректності оцінювання АДК, лінійна незалежність компонент Ах, (t) вектор - функції ДХ(Ц лінійної по формі моделі (3) ДУ=ДХ С (7) де коефіцієнт С, згідно виразу (4) і умови ступенчатості керуючого органу та квазіступенчатості інших змінних ДХ, є величиною близькою до сталої яка оцінюється для кожної ступеньки керуючого органу аналогічно виразу (5) т Х ДУ (8) Всі ЦІ ДІЇ ЯКІ мають місце і в прототипі, виконуються блоками 2 -ь 9 схеми фіг 1 Далі, на відміну від прототипу, блоком 1 формується максимальне чи середнє значення однієї зі змінних Дх, т а х (і) для і- і ступеньки керуючого органу і, за умови близьКОСТІ ОЦІНОК (8) і лінійної регресійної залежно СТІ С(І) = А + (9) за умови мінімуму середнього квадрату похибки SA на виході блоку 7 в блоці 10 визначаються коефіцієнти A,D моделі (9), де А і є шукана величина АДК, тобто його значення в точці ДХ = 0 За такий спосіб вимірювання АДК в ПР літака має місце, як підвищення точності в оцінюванні АДК, так і зниження вимог до некорельованості змінних стану ДХ Тобто експеримент простіший, реалізуємий в реальних умовах невизначеності характеристик досліджуємого об'єкту Як приклад, на фіг 2 наведено графіки ПОСЛІДОВНОСТІ різних по амплітуді ступеньок рулями висоти 5вта квазіступенчатих відхилень кута атаки а кутової швидкості ^ літака М-17 Для кожної ступеньки рулів реєструвалися ЗМІННІ, згладжувались випадкові помилки в вимірах змінних і за формулою (5) оцінювалися АДК в ПР Далі, згідно до формули (9), оцінки АДК, отримані для кожної ступеньки, апроксимірували ЛІНІЙНОЮ залежністю від Д а т а х Шукана оцінка ІСТИННОГО значення запасу СТІЙКОСТІ ^ ' з моделі (9), яка для запасу СТІЙКО СТІ ЛА має вигляд і =0,22-0,075Да г (10) дорівнює 0,22 її випадковий розкид суттєво менший різниці між цією оцінкою та оцінкою 0,17, яку отримують з лінійної моделі шляхом простого ^п(і) « усереднення оцінок ^ ' для кожної ступеньки або розрахунку АДК по всім ступенькам разом Наступний чисельний приклад, також ілюструє перевагу заявляемого способу Покладемо, що квадратична модель має вигляд (11) Оцінюються коефіцієнти а-і, і = 1,2,3, лінійної частини моделі (11) y(t) = aixi(t) + a 2 x 2 (t) + a 3 x 3 (t) + s(t) (12) кретних значень t = (k- 1)At, Тоді 1-exp 1 > N , N = 100 y(k) = aixi(k) + a 2 x 2 (k) + a 3 x 3 (k) + s(k) 1-exp де Xmax приймає чотири значення 1, 0,5, 0,25, 0,124 Результати розрахунків наведено на фіг 4 (для точних даних) і фіг 5 (для даних з 10% шумом) В обох випадках прямі (7), получені по МНК (13) ЗМІННІ xi(k), X2(k), хз(к) - експоненти де s(t) - нев'язка лівої і правої частин (12), ліва частина задана згідно (11), час t приймає N дис x1(k)=xr k (14) дають значення ' близьке до А = 1 Розрахунок по методу найменших квадратів (МНК) повної моделі (11) (для 10% шумів) призводить до розкиду ' на порядок більшому ніж значення А = 1 48566 0 1 2 3 s Фіг.З. Фіг.4. Фіг.2. «СО ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71 6 7
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determining aerodynamic coefficients characterizing longitudinal flight of an aircraft
Автори англійськоюSilvestrov Anton Mykolaiovych
Назва патенту російськоюСпособ определения аэродинамических коэффициентов, характеризующих продольное движение самолета
Автори російськоюСильвестров Антон Николаевич
МПК / Мітки
МПК: G01M 9/00
Мітки: коефіцієнтів, літаків, повздовжнього, вимірювання, аеродинамічних, руху, спосіб
Код посилання
<a href="https://ua.patents.su/4-48566-sposib-vimiryuvannya-aerodinamichnikh-koeficiehntiv-povzdovzhnogo-rukhu-litakiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання аеродинамічних коефіцієнтів повздовжнього руху літаків</a>
Гіровібраційний рушій повздовжнього і криволінійного руху
Номер патенту: 36021
Опубліковано: 16.04.2001
Автор: Жуковський Леонід Михайлович
МПК: G01C 19/00, B64G 1/28
Мітки: гіровібраційний, повздовжнього, рушій, руху, криволінійного
Текст:
...дію; - оберти ротора гіроскопа по колу рад. R., при якому виникає збурююча сила F, даний пристрій працює як дебалансний інерційний вібратор; - спарена робота двох гіроскопічних пристроїв обертання останніх по колу рад. R, в даному разі пристрій працює як самобалансуючий інерційний вібратор. Останній здійснює однонапрямлене безопорне зміщення агрегату, яке досягається за рахунок повороту гіроскопічних пристроїв на кут менше a=160°....
Пристрій для вимірювання коефіцієнтів поглинання та розсіювання і4-випромінювання
Номер патенту: 3669
Опубліковано: 27.12.1994
Автори: Дряхлов Вадим Львович, Комарь Віталій Корнійович, Загоруйко Юрій Анатолійович, Єпіфанов Юрій Михайлович, Герасимчук Лариса Іванівна
МПК: G01J 5/20
Мітки: коефіцієнтів, і4-випромінювання, вимірювання, розсіювання, пристрій, поглинання
Формула / Реферат:
Устройство для измерения коэффициентов поглощения и рассеяния ИК-излучения, содержащее последовательно установленные на единой оптической оси СО2-лазер, механический затвор с управляющим реле, оптическую делительную пластину и теплоизолирующую камеру с исследуемым и эталонным образцами и первой дифференциальной термопарой, а также первый и второй измерители мощности ИК-излучения, первый многоканальный аналого-цифровой преобразователь,...
Магнітоелектричний спосіб вимірювання швидкості руху об’єкта
Номер патенту: 40603
Опубліковано: 15.08.2001
Автор: Джурук Володимир Юрійович
МПК: G01P 3/42
Мітки: об'єкта, магнітоелектричний, руху, спосіб, вимірювання, швидкості
Формула / Реферат:
Магнитоэлектрический способ изменения скорости движения объекта, заключающийся в том, что измеряют выходной сигнал датчика и по нему судят о скорости движения объекта, отличающийся тем, что датчик устанавливают на объекте, а в качестве датчика используют постоянный магнит с обмоткой, вращают его вокруг оси, перпендикулярной направлению движения объекта, и скорость V движения объекта определяют по формулегдеС -...
Пристрій для вимірювання параметрів руху об’єктів
Номер патенту: 24142
Опубліковано: 30.10.1998
Автори: Беляєв Анатолій Констянтинович, Гриценко Володимир Ілліч, Мудла Борис Гордійович, Корнієнко Григорій Іванович
Мітки: вимірювання, руху, параметрів, пристрій, об'єктів
Текст:
...- с выходом блока сравнения, 45 а выходы - соответственно с первым и вторым входами блока вычисления перемещений, третий вход которого подключен к строчному выходу синхронизатора. 50 55 60 65 На фиг. 1 приведена структурная электрическая схема предложенного устройства; на фиг. 2 - изоб-** ражение кромки неподвижного объекта на телевизионном растре} на фиг. 3 - изображение кромки движущегося объекта на телевизионном растре. Предложенное...
Спосіб розпізнавання аеродинамічних гвинтомоторних об’єктів, які низько літають
Номер патенту: 25466
Опубліковано: 30.10.1998
Автори: Палаєв Сергій Васильович, Баранов Олександр Миколаєвич
МПК: G01S 13/42, G01S 13/78
Мітки: аеродинамічних, спосіб, розпізнавання, об'єктів, гвинтомоторних, літають, низької
Формула / Реферат:
Способ распознавания низколетящих аэродинамических винтомоторных объектов, основанный на полосовой фильтрации, усилении гидроакустического шумоизлучения, выделении огибающей, спектральном разложении, корреляционной обработке огибающей, выделении парциальных коэффициентов модуляции по измеренным среднеквадратичным уровням дискретных составляющих огибающей, отличающийся тем, что излучают непрерывный тональный зондирующий радиосигнал, принимают...
Попередній патент: Спосіб лікування травматичних ран печінки
Наступний патент: Спосіб протипожежного захисту транспортного засобу
Випадковий патент: Спосіб лікування виразкової хвороби шлунка та дванадцятипалої кишки, що асоційована helicobakter pilori