Підйомна платформа
Формула / Реферат
1. Підйомна платформа, яка містить раму та підйомну площадку, з'єднані між собою просторовою шарнірно-важільною системою, важелі якої взаємозв'язані з утворенням пантографів, розташованих паралельно та шарнірно зв'язаних вільними кінцями важелів з підйомною площадкою та рамою, причому один важіль кожного пантографа з'єднаний з горизонтальною напрямною рами, і привід підйому підйомної площадки, яка відрізняється тим, що містить не менше трьох пантографів, утворюючих стійку систему опор змінної висоти підйомної площадки, а усі нижні важелі пантографів жорстко зв'язані механічною самогальмівною передачею приводу, який дозволяє тільки синхронне переміщення усіх важелів.
2. Підйомна платформа за п. 1, яка відрізняється тим, що чотири пантографи попарно з'єднані між собою спільними осями шарнірів і механічною передачею приводу, причому одна пара встановлена з можливістю руху всередині другої пари.
3. Підйомна платформа за п. 1, яка відрізняється тим, що нижні важелі пантографів зв'язані між собою самогальмівною передачею за допомогою додаткових важелів, шарнірно зв'язаних з важелями пантографів, причому осі шарнірів зміщені відносно осей важелів пантографів з утворенням кута між додатковими важелями, більшого, ніж відповідний кут між важелями пантографа.
Текст
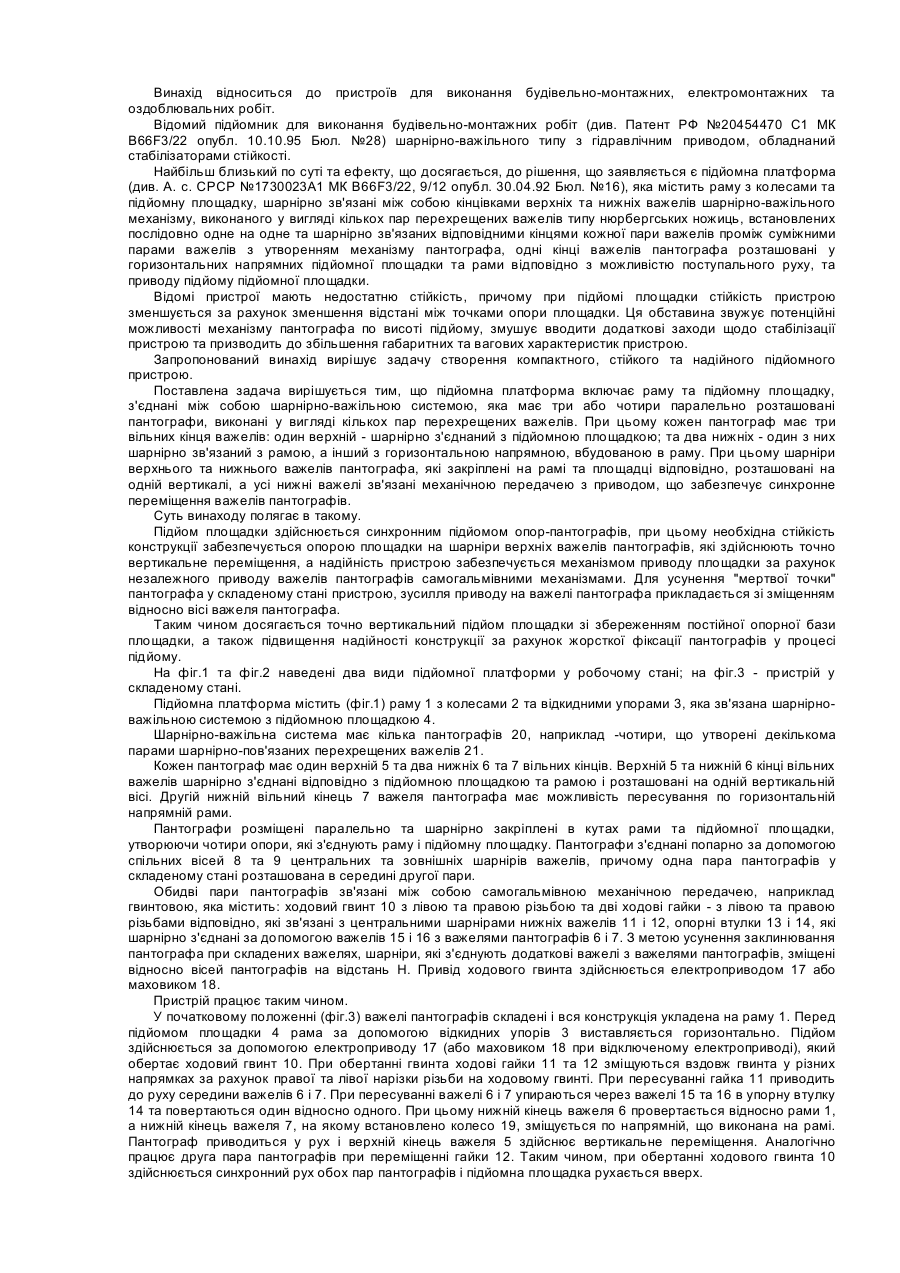
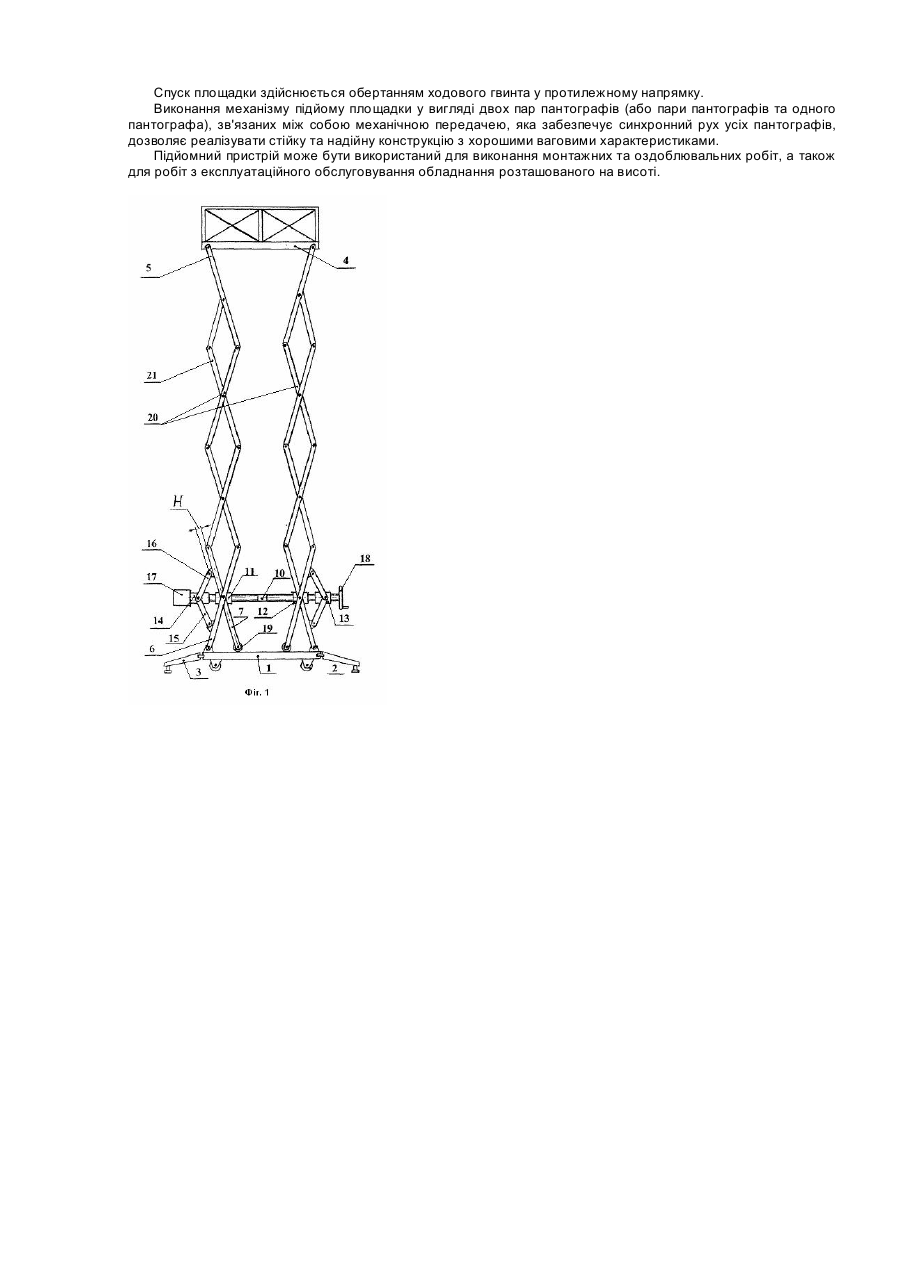
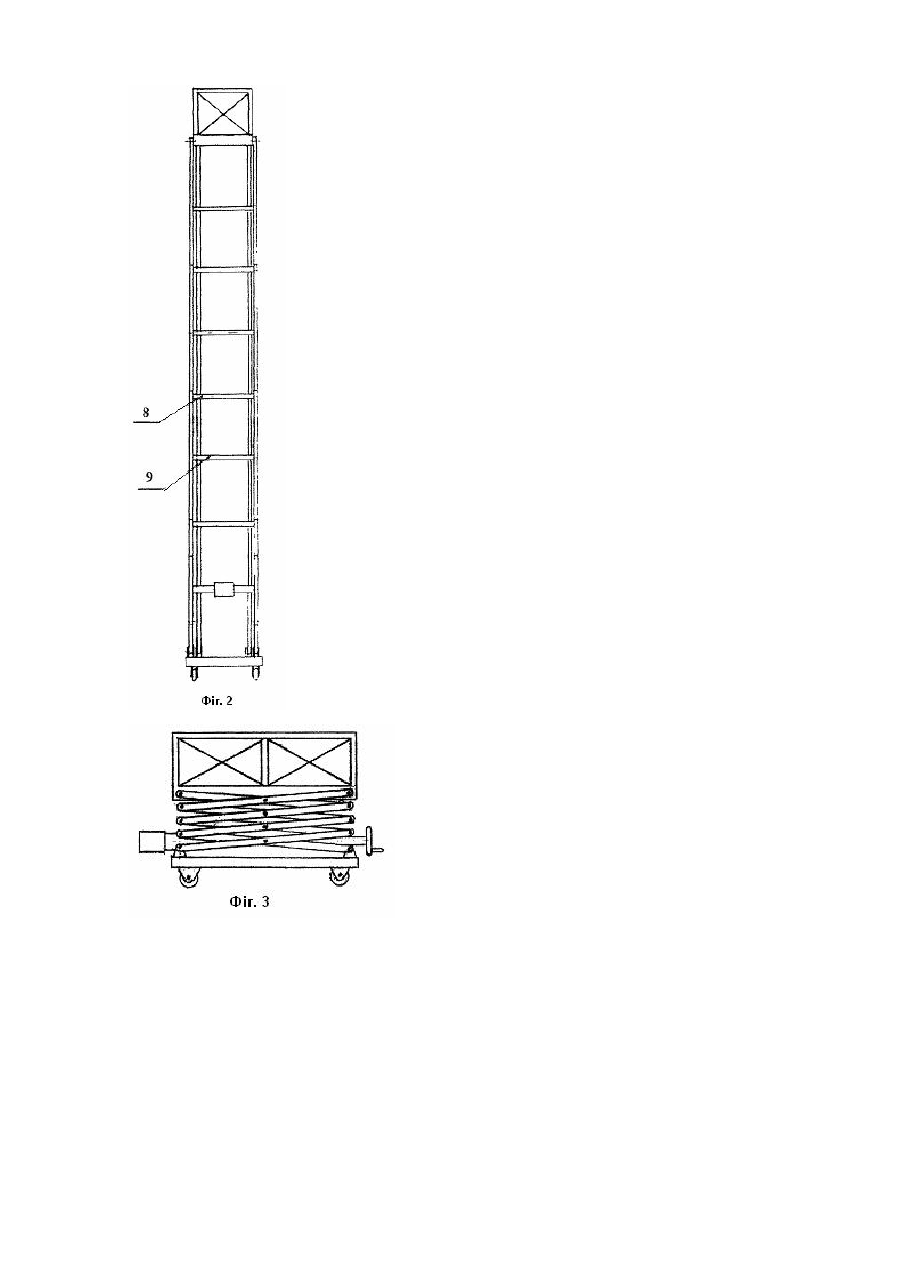
Винахід відноситься до пристроїв для виконання будівельно-монтажних, електромонтажних та оздоблювальних робіт. Відомий підйомник для виконання будівельно-монтажних робіт (див. Патент РФ №20454470 С1 МК В66F3/22 опубл. 10.10.95 Бюл. №28) шарнірно-важільного типу з гідравлічним приводом, обладнаний стабілізаторами стійкості. Найбільш близький по суті та ефекту, що досягається, до рішення, що заявляється є підйомна платформа (див. А. с. СРСР №1730023А1 МК В66F3/22, 9/12 опубл. 30.04.92 Бюл. №16), яка містить раму з колесами та підйомну площадку, шарнірно зв'язані між собою кінцівками верхніх та нижніх важелів шарнірно-важільного механізму, виконаного у вигляді кількох пар перехрещених важелів типу нюрбергських ножиць, встановлених послідовно одне на одне та шарнірно зв'язаних відповідними кінцями кожної пари важелів проміж суміжними парами важелів з утворенням механізму пантографа, одні кінці важелів пантографа розташовані у горизонтальних напрямних підйомної площадки та рами відповідно з можливістю поступального руху, та приводу підйому підйомної площадки. Відомі пристрої мають недостатню стійкість, причому при підйомі площадки стійкість пристрою зменшується за рахунок зменшення відстані між точками опори площадки. Ця обставина звужує потенційні можливості механізму пантографа по висоті підйому, змушує вводити додаткові заходи щодо стабілізації пристрою та призводить до збільшення габаритних та вагових характеристик пристрою. Запропонований винахід вирішує задачу створення компактного, стійкого та надійного підйомного пристрою. Поставлена задача вирішується тим, що підйомна платформа включає раму та підйомну площадку, з'єднані між собою шарнірно-важільною системою, яка має три або чотири паралельно розташовані пантографи, виконані у вигляді кількох пар перехрещених важелів. При цьому кожен пантограф має три вільних кінця важелів: один верхній - шарнірно з'єднаний з підйомною площадкою; та два нижніх - один з них шарнірно зв'язаний з рамою, а інший з горизонтальною напрямною, вбудованою в раму. При цьому шарніри верхнього та нижнього важелів пантографа, які закріплені на рамі та площадці відповідно, розташовані на одній вертикалі, а усі нижні важелі зв'язані механічною передачею з приводом, що забезпечує синхронне переміщення важелів пантографів. Суть винаходу полягає в такому. Підйом площадки здійснюється синхронним підйомом опор-пантографів, при цьому необхідна стійкість конструкції забезпечується опорою площадки на шарніри верхніх важелів пантографів, які здійснюють точно вертикальне переміщення, а надійність пристрою забезпечується механізмом приводу площадки за рахунок незалежного приводу важелів пантографів самогальмівними механізмами. Для усунення "мертвої точки" пантографа у складеному стані пристрою, зусилля приводу на важелі пантографа прикладається зі зміщенням відносно вісі важеля пантографа. Таким чином досягається точно вертикальний підйом площадки зі збереженням постійної опорної бази площадки, а також підвищення надійності конструкції за рахунок жорсткої фіксації пантографів у процесі підйому. На фіг.1 та фіг.2 наведені два види підйомної платформи у робочому стані; на фіг.3 - пристрій у складеному стані. Підйомна платформа містить (фіг.1) раму 1 з колесами 2 та відкидними упорами 3, яка зв'язана шарнірноважільною системою з підйомною площадкою 4. Шарнірно-важільна система має кілька пантографів 20, наприклад -чотири, що утворені декількома парами шарнірно-пов'язаних перехрещених важелів 21. Кожен пантограф має один верхній 5 та два нижніх 6 та 7 вільних кінців. Верхній 5 та нижній 6 кінці вільних важелів шарнірно з'єднані відповідно з підйомною площадкою та рамою і розташовані на одній вертикальній вісі. Другій нижній вільний кінець 7 важеля пантографа має можливість пересування по горизонтальній напрямній рами. Пантографи розміщені паралельно та шарнірно закріплені в кутах рами та підйомної площадки, утворюючи чотири опори, які з'єднують раму і підйомну площадку. Пантографи з'єднані попарно за допомогою спільних вісей 8 та 9 центральних та зовнішніх шарнірів важелів, причому одна пара пантографів у складеному стані розташована в середині другої пари. Обидві пари пантографів зв'язані між собою самогальмівною механічною передачею, наприклад гвинтовою, яка містить: ходовий гвинт 10 з лівою та правою різьбою та дві ходові гайки - з лівою та правою різьбами відповідно, які зв'язані з центральними шарнірами нижніх важелів 11 і 12, опорні втулки 13 і 14, які шарнірно з'єднані за допомогою важелів 15 і 16 з важелями пантографів 6 і 7. З метою усунення заклинювання пантографа при складених важелях, шарніри, які з'єднують додаткові важелі з важелями пантографів, зміщені відносно вісей пантографів на відстань Н. Привід ходового гвинта здійснюється електроприводом 17 або маховиком 18. Пристрій працює таким чином. У початковому положенні (фіг.3) важелі пантографів складені і вся конструкція укладена на раму 1. Перед підйомом площадки 4 рама за допомогою відкидних упорів 3 виставляється горизонтально. Підйом здійснюється за допомогою електроприводу 17 (або маховиком 18 при відключеному електроприводі), який обертає ходовий гвинт 10. При обертанні гвинта ходові гайки 11 та 12 зміщуються вздовж гвинта у різних напрямках за рахунок правої та лівої нарізки різьби на ходовому гвинті. При пересуванні гайка 11 приводить до руху середини важелів 6 і 7. При пересуванні важелі 6 і 7 упираються через важелі 15 та 16 в упорну втулку 14 та повертаються один відносно одного. При цьому нижній кінець важеля 6 провертається відносно рами 1, а нижній кінець важеля 7, на якому встановлено колесо 19, зміщується по напрямній, що виконана на рамі. Пантограф приводиться у рух і верхній кінець важеля 5 здійснює вертикальне переміщення. Аналогічно працює друга пара пантографів при переміщенні гайки 12. Таким чином, при обертанні ходового гвинта 10 здійснюється синхронний рух обох пар пантографів і підйомна площадка рухається вверх. Спуск площадки здійснюється обертанням ходового гвинта у протилежному напрямку. Виконання механізму підйому площадки у вигляді двох пар пантографів (або пари пантографів та одного пантографа), зв'язаних між собою механічною передачею, яка забезпечує синхронний рух усіх пантографів, дозволяє реалізувати стійку та надійну конструкцію з хорошими ваговими характеристиками. Підйомний пристрій може бути використаний для виконання монтажних та оздоблювальних робіт, а також для робіт з експлуатаційного обслуговування обладнання розташованого на висоті.
ДивитисяДодаткова інформація
Назва патенту англійськоюLifting platform
Автори англійськоюRadchenko Heorhii Fedorovych
Назва патенту російськоюПодъемная платформа
Автори російськоюРадченко Георгий Федорович
МПК / Мітки
МПК: B66F 3/00
Код посилання
<a href="https://ua.patents.su/3-66537-pidjjomna-platforma.html" target="_blank" rel="follow" title="База патентів України">Підйомна платформа</a>
Багатоланцюгова підйомна установка
Номер патенту: 38248
Опубліковано: 15.05.2001
Автори: Білоброва Олена Аркадійовна, Дзензерський Віктор Олександрович, Білобров Віктор Іванович
МПК: B66B 15/00
Мітки: установка, багатоланцюгова, підйомна
Текст:
...ланцюгів, швидко і точно установити одну підйомну посудину на місце для завантаження, другу - на розвантаження і вирівняти сили в усі х ланцюга х. За наявними у авторів відомостями суттєві ознаки, що пропонуються і характеризують сут 2 38248 ність винаходу, невідомі з рівня техніки, отже, винахід відповідає критерію "новизна". Сутність запропонованого винаходу не виникає для фахівця явним чином з відомого рівня техніки. Сукупність ознак,...
Аеростатна платформа для зв’язку та мовлення
Номер патенту: 56782
Опубліковано: 15.05.2003
Автори: Наритник Теодор Миколайович, Тян Едуард Борисович, Бабак Віталій Павлович, Ударцев Євген Павлович
МПК: B64B 1/50
Мітки: зв'язку, аеростатна, мовлення, платформа
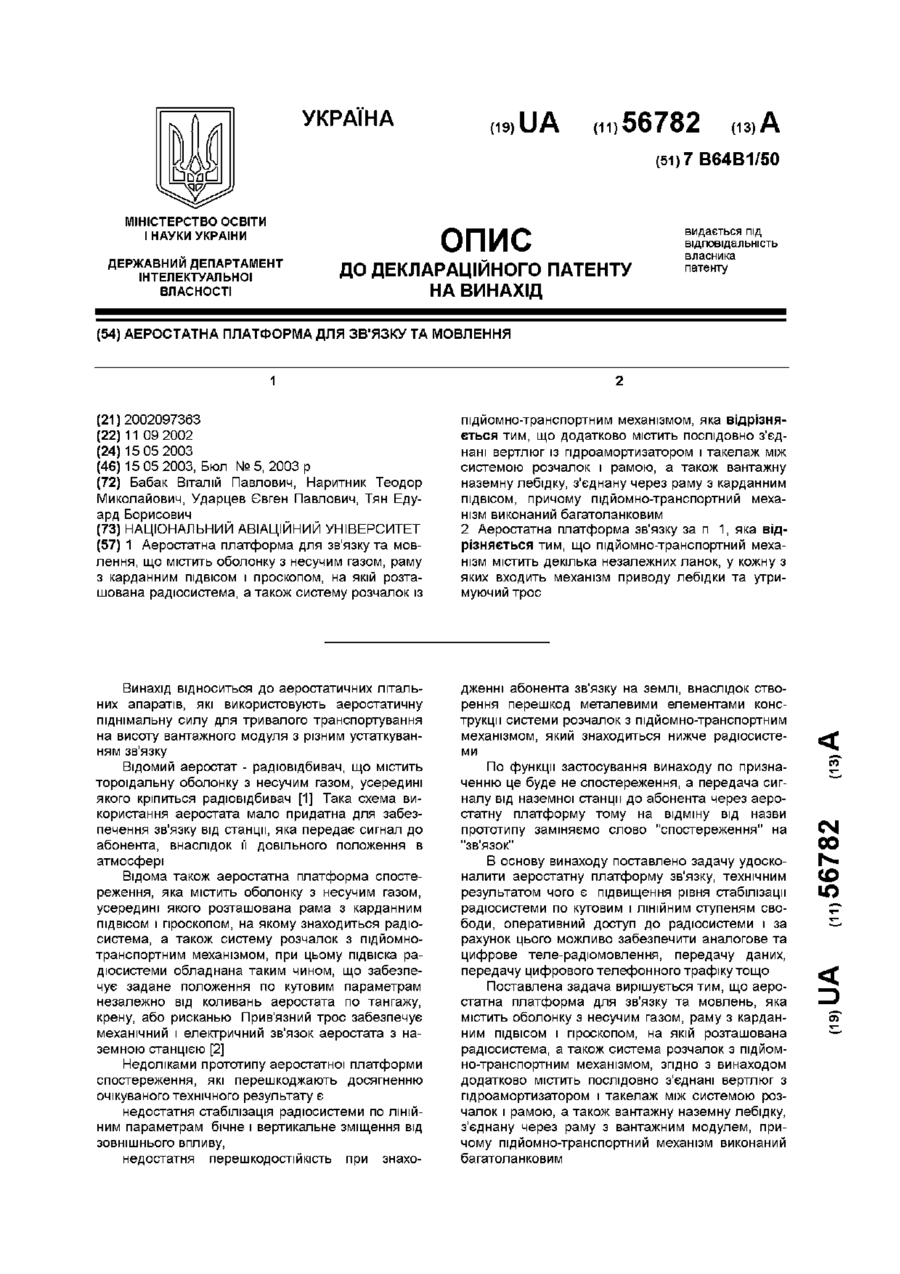
Формула / Реферат:
1. Аеростатна платформа для зв'язку та мовлення, що містить оболонку з несучим газом, раму з карданним підвісом і гіроскопом, на якій розташована радіосистема, а також систему розчалок із підйомно-транспортним механізмом, яка відрізняється тим, що додатково містить послідовно з'єднані вертлюг із гідроамортизатором і такелаж між системою розчалок і рамою, а також вантажну наземну лебідку, з'єднану через раму з карданним підвісом, причому...
Платформа для контейнерів та колісної техніки
Номер патенту: 26247
Опубліковано: 19.07.1999
Автори: Барбашов Валентин Михайлович, Воронович Віктор Петрович, Андрюшин Іван Сергійович, Дьомін Юрій Васильович, Кирпа Георгій Миколайович, Савчук Орест Макарович, Приходько Володимир Іванович, Кисельов Володимир Миколайович, Плютін Іван Іванович
Мітки: техніки, колісної, платформа, контейнерів
Формула / Реферат:
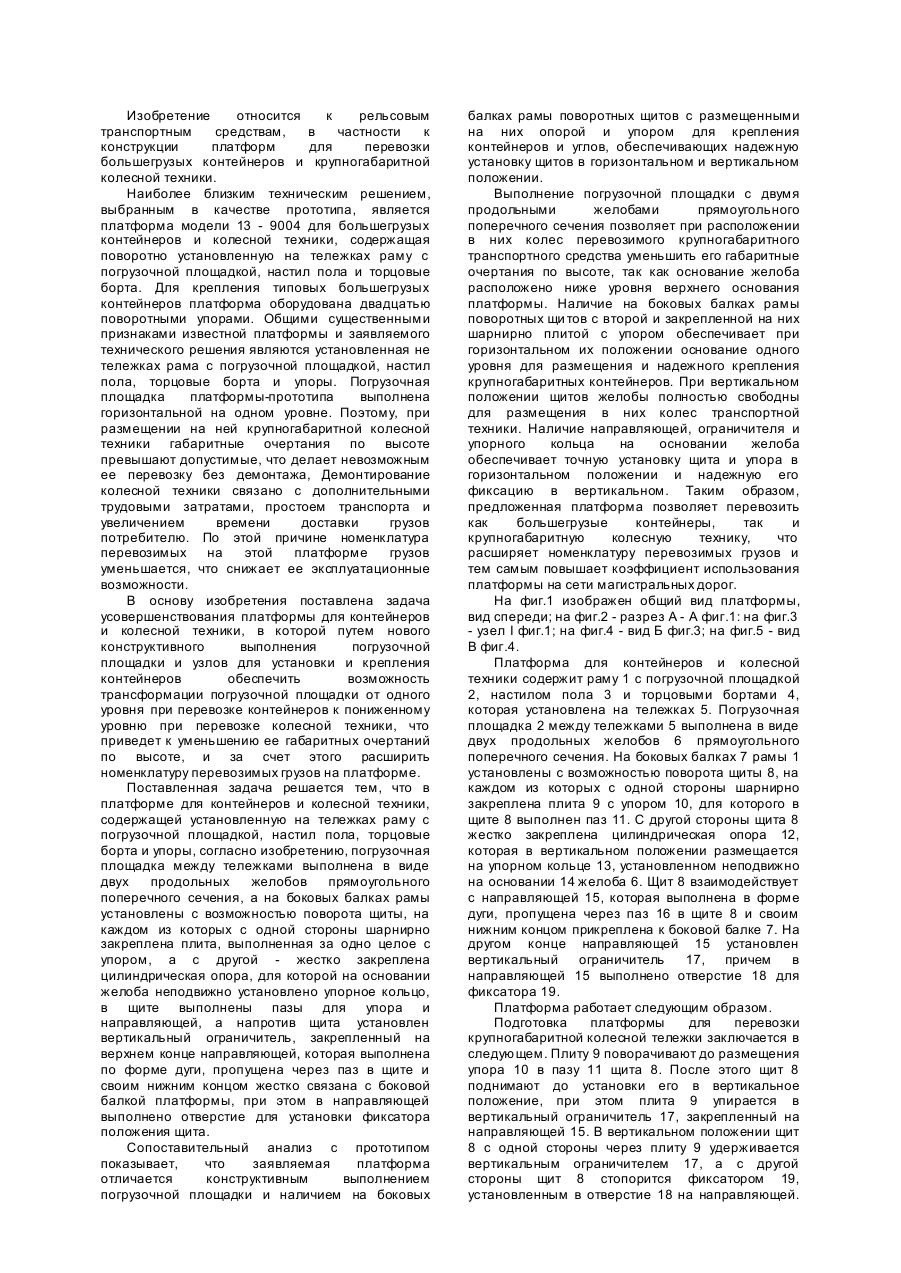
Платформа для контейнеров и колесной техники, содержащая установленную на тележках раму с погрузочной площадкой, настил пола, торцовые борта и упоры, отличающаяся тем, что погрузочная площадка между тележками выполнена в виде двух продольных желобов прямоугольного поперечного сечения, а на боковых балках рамы установлены с возможностью поворота щиты, на каждом из которых с одной стороны шарнирно закреплена плита, выполненная за одно целое с...
Залізнична універсальна платформа
Номер патенту: 6289
Опубліковано: 29.12.1994
Автори: Дузік Микола Прокопович, Жовтобрюх Григорій Дем'янович, Дураченко Михайло Іванович, Осадчук Григорій Іванович, Петруша Василь Іванович, Кузьміч Леонід Дмитрович
МПК: B61D 3/00
Мітки: залізнична, універсальна, платформа
Формула / Реферат:
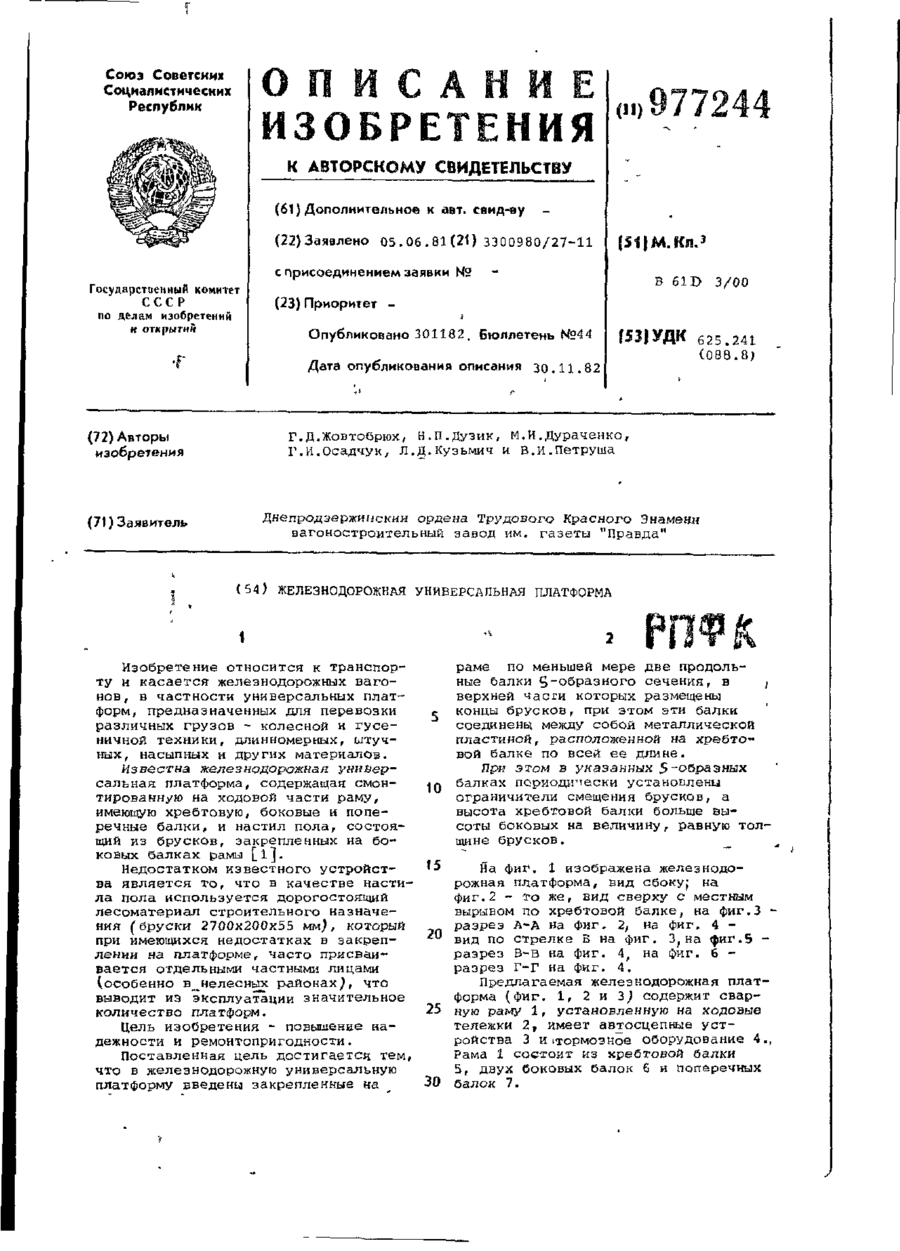
1. Железнодорожная универсальная платформа, содержащая смонтированную на ходовой части раму, имеющую хребтовую, боковые и поперечные балки, и настил пола, состоящий из брусков, закрепленных на боковых балках рамы, отличающаяся тем, что, с целью повышения надежности и ремонтопригодности, она снабжена закрепленными на раме по меньшей мере двумя продольными балками 5-образного сечения, в верхней части которых размещены концы брусков, при...
Підйомна установка
Номер патенту: 5286
Опубліковано: 28.12.1994
Автори: Псарьов Сєргєй Дмітрієвіч, Попов Микола Олександрович, Мостовий Олег Григорович, Наумов Віктор Ільіч
МПК: B66B 15/00
Формула / Реферат:
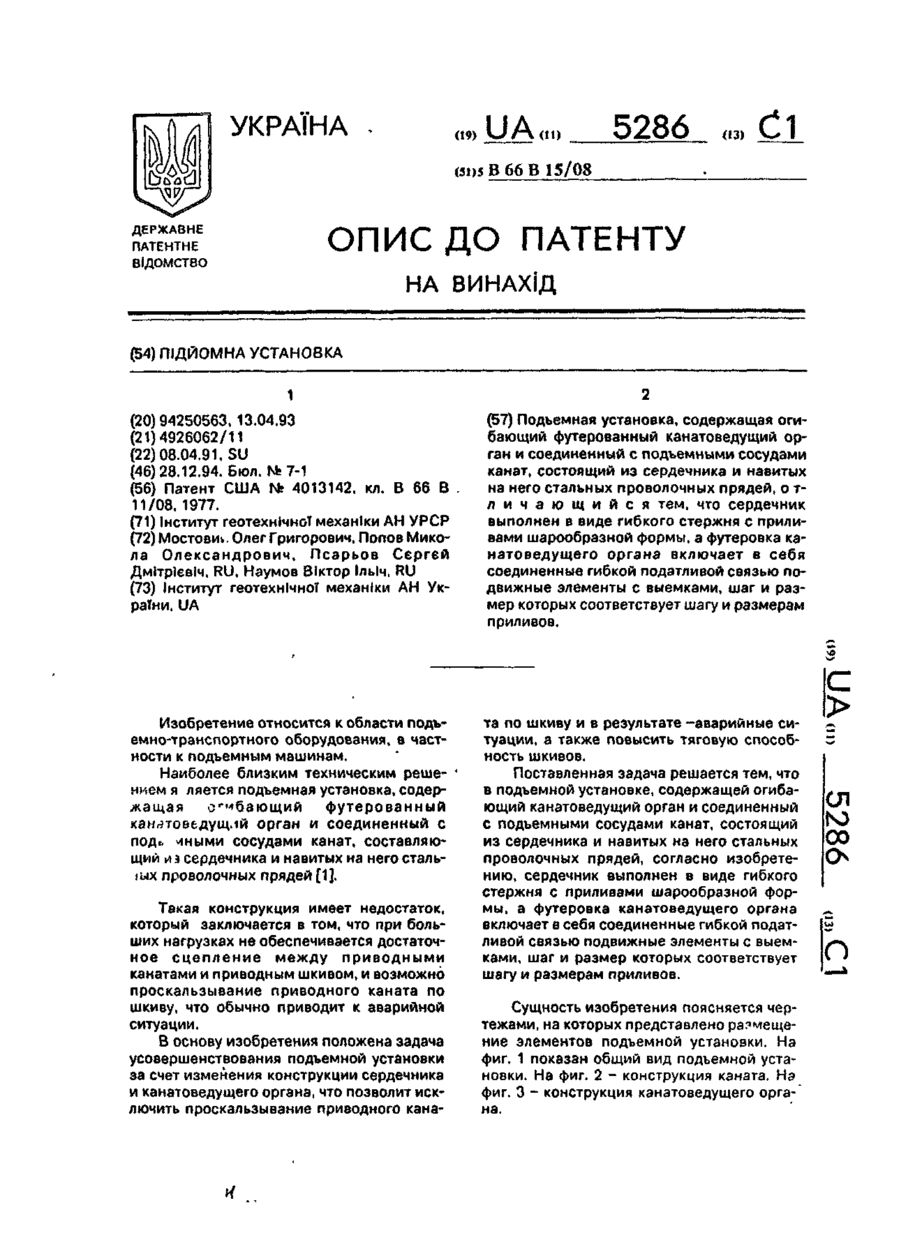
(57) Подъемная установка, содержащая огибающий футерованный канатоведущий орган и соединенный с подъемными сосудами канат, состоящий из сердечника и навитых на него стальных проволочных прядей, отличающийся тем, что сердечник выполнен в виде гибкого стержня с приливами шарообразной формы, а футеровка канатоведущего органа включает в себя соединенные гибкой податливой связью подвижные элементы с выемками, шаг и размер которых соответствует...
Попередній патент: Спосіб виявлення дефектів інтегральних схем
Наступний патент: Торцеве ущільнення
Випадковий патент: Оптичний германій