Спосіб автоматичної передачі інформації з обертової частини об’єкта на нерухому
Номер патенту: 68812
Опубліковано: 15.09.2005
Автори: Кондратець Василь Олександрович, Кирилюк Марина Олександрівна


Формула / Реферат
Засіб для лікування мікозного ураження слизової оболонки ротової порожнини, який відрізняється тим, що крім етилового спирту, діетилового етеру, прополісу, додатково включено етерової олії чебрецю, настойки чистотілу, етерової олії сухоцвіту мочару, етерової олії перстачу прямостоячого та екстракту сухого солодкого кореня у такому співвідношенні компонентів, мас.%:
прополіс
28,00-26,00
етиловий спирт
30,50-31,50
етер діетиловий
21,50-22,50
етерова олія чебрецю
8,00-6,00
настойка чистотілу
3,00-4,00
етерова олія сухоцвіту мочару
2,00-3,00
етерова олія перстачу прямостоячого
4,00-2,00
екстракт сухий солодкого кореня
3,00-5,00
Текст
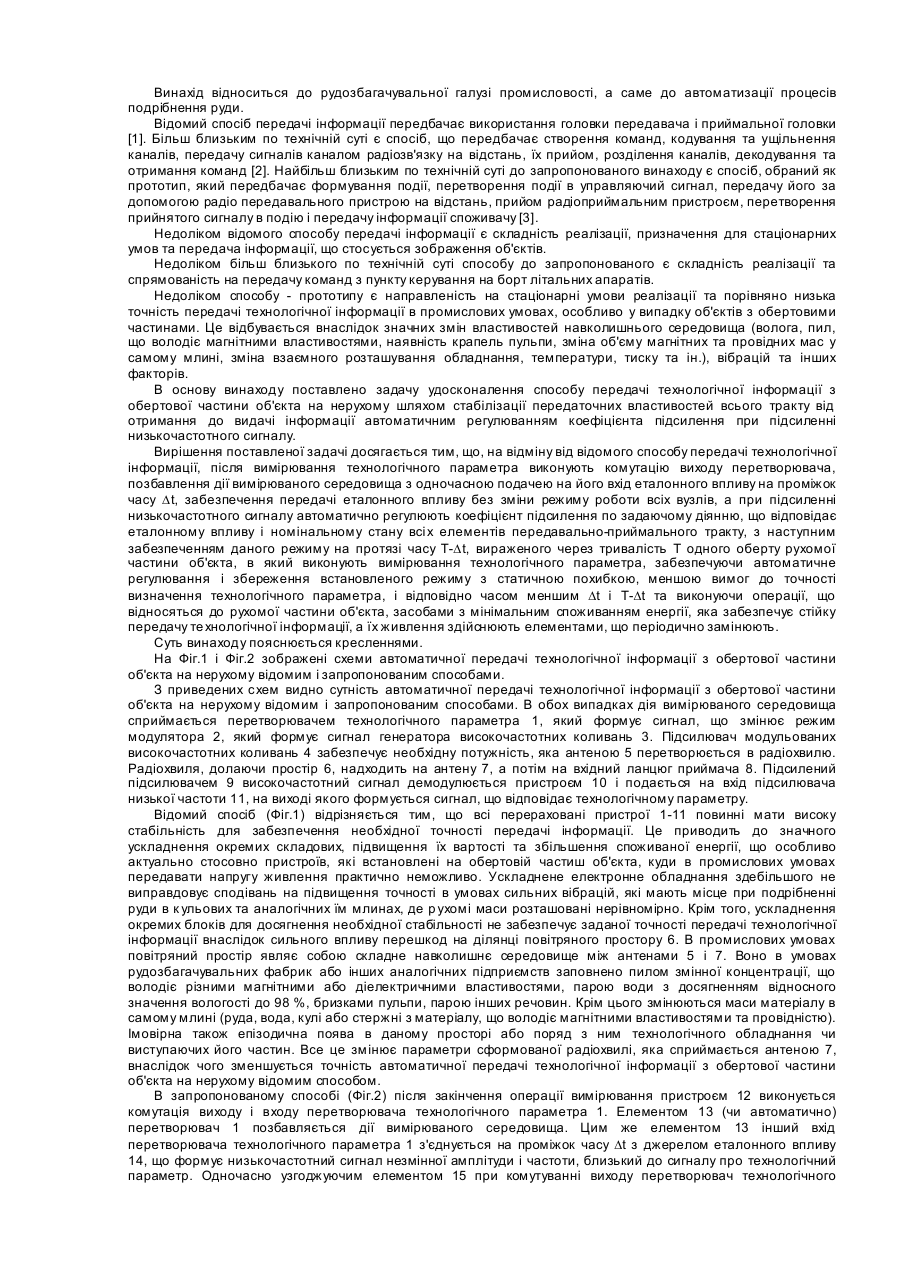
Винахід відноситься до рудозбагачувальної галузі промисловості, а саме до автоматизації процесів подрібнення руди. Відомий спосіб передачі інформації передбачає використання головки передавача і приймальної головки [1]. Більш близьким по технічній суті є спосіб, що передбачає створення команд, кодування та ущільнення каналів, передачу сигналів каналом радіозв'язку на відстань, їх прийом, розділення каналів, декодування та отримання команд [2]. Найбільш близьким по технічній суті до запропонованого винаходу є спосіб, обраний як прототип, який передбачає формування події, перетворення події в управляючий сигнал, передачу його за допомогою радіо передавального пристрою на відстань, прийом радіоприймальним пристроєм, перетворення прийнятого сигналу в подію і передачу інформації споживачу [3]. Недоліком відомого способу передачі інформації є складність реалізації, призначення для стаціонарних умов та передача інформації, що стосується зображення об'єктів. Недоліком більш близького по технічній суті способу до запропонованого є складність реалізації та спрямованість на передачу команд з пункту керування на борт літальних апаратів. Недоліком способу - прототипу є направленість на стаціонарні умови реалізації та порівняно низька точність передачі технологічної інформації в промислових умовах, особливо у випадку об'єктів з обертовими частинами. Це відбувається внаслідок значних змін властивостей навколишнього середовища (волога, пил, що володіє магнітними властивостями, наявність крапель пульпи, зміна об'єму магнітних та провідних мас у самому млині, зміна взаємного розташування обладнання, температури, тиску та ін.), вібрацій та інших факторів. В основу винаходу поставлено задачу удосконалення способу передачі технологічної інформації з обертової частини об'єкта на нерухому шляхом стабілізації передаточних властивостей всього тракту від отримання до видачі інформації автоматичним регулюванням коефіцієнта підсилення при підсиленні низькочастотного сигналу. Вирішення поставленої задачі досягається тим, що, на відміну від відомого способу передачі технологічної інформації, після вимірювання технологічного параметра виконують комутацію виходу перетворювача, позбавлення дії вимірюваного середовища з одночасною подачею на його вхід еталонного впливу на проміжок часу Dt, забезпечення передачі еталонного впливу без зміни режиму роботи всіх вузлів, а при підсиленні низькочастотного сигналу автоматично регулюють коефіцієнт підсилення по задаючому діянню, що відповідає еталонному впливу і номінальному стану всі х елементів передавально-приймального тракту, з наступним забезпеченням даного режиму на протязі часу Т-Dt, вираженого через тривалість Τ одного оберту рухомої частини об'єкта, в який виконують вимірювання технологічного параметра, забезпечуючи автоматичне регулювання і збереження встановленого режиму з статичною похибкою, меншою вимог до точності визначення технологічного параметра, і відповідно часом меншим Dt і Т-Dt та виконуючи операції, що відносяться до рухомої частини об'єкта, засобами з мінімальним споживанням енергії, яка забезпечує стійку передачу те хнологічної інформації, а їх живлення здійснюють елементами, що періодично замінюють. Суть винаходу пояснюється кресленнями. На Фіг.1 і Фіг.2 зображені схеми автоматичної передачі технологічної інформації з обертової частини об'єкта на нерухому відомим і запропонованим способами. З приведених схем видно сутність автоматичної передачі технологічної інформації з обертової частини об'єкта на нерухому відомим і запропонованим способами. В обох випадках дія вимірюваного середовища сприймається перетворювачем технологічного параметра 1, який формує сигнал, що змінює режим модулятора 2, який формує сигнал генератора високочастотних коливань 3. Підсилювач модульованих високочастотних коливань 4 забезпечує необхідну потужність, яка антеною 5 перетворюється в радіохвилю. Радіохвиля, долаючи простір 6, надходить на антену 7, а потім на вхідний ланцюг приймача 8. Підсилений підсилювачем 9 високочастотний сигнал демодулюється пристроєм 10 і подається на вхід підсилювача низької частоти 11, на виході якого формується сигнал, що відповідає технологічному параметру. Відомий спосіб (Фіг.1) відрізняється тим, що всі перераховані пристрої 1-11 повинні мати високу стабільність для забезпечення необхідної точності передачі інформації. Це приводить до значного ускладнення окремих складових, підвищення їх вартостіта збільшення споживаної енергії, що особливо актуально стосовно пристроїв, які встановлені на обертовій частиш об'єкта, куди в промислових умовах передавати напругу живлення практично неможливо. Ускладнене електронне обладнання здебільшого не виправдовує сподівань на підвищення точності в умовах сильних вібрацій, які мають місце при подрібненні руди в к ульових та аналогічних їм млинах, де р ухомі маси розташовані нерівномірно. Крім того, ускладнення окремих блоків для досягнення необхідної стабільності не забезпечує заданої точності передачі технологічної інформації внаслідок сильного впливу перешкод на ділянці повітряного простору 6. В промислових умовах повітряний простір являє собою складне навколишнє середовище між антенами 5 і 7. Воно в умовах рудозбагачувальних фабрик або інших аналогічних підприємств заповнено пилом змінної концентрації, що володіє різними магнітними або діелектричними властивостями, парою води з досягненням відносного значення вологості до 98 %, бризками пульпи, парою інших речовин. Крім цього змінюються маси матеріалу в самому млині (руда, вода, кулі або стержні з матеріалу, що володіє магнітними властивостями та провідністю). Імовірна також епізодична поява в даному просторі або поряд з ним технологічного обладнання чи виступаючих його частин. Все це змінює параметри сформованої радіохвилі, яка сприймається антеною 7, внаслідок чого зменшується точність автоматичної передачі технологічної інформації з обертової частини об'єкта на нерухому відомим способом. В запропонованому способі (Фіг.2) після закінчення операції вимірювання пристроєм 12 виконується комутація виходу і входу перетворювача технологічного параметра 1. Елементом 13 (чи автоматично) перетворювач 1 позбавляється дії вимірюваного середовища. Цим же елементом 13 інший вхід перетворювача технологічного параметра 1 з'єднується на проміжок часу Dt з джерелом еталонного впливу 14, що формує низькочастотний сигнал незмінної амплітуди і частоти, близький до сигналу про технологічний параметр. Одночасно узгоджуючим елементом 15 при комутуванні виходу перетворювач технологічного параметра з'єднується з входом модулятора 2. Стандартизований сигнал, що відповідає еталонному впливу, формує коливання генератора високочастотних коливань 3, які підсилюються підсилювачем 4 і випромінюються антеною 5. Долаючи простір 6, високочастотні коливання у ви гляді радіохвилі надходять на антену 7 і сприймаються вхідним ланцюгом приймача 8, підсилюються підсилювачем високочастотного сигналу 9, демодулюються пристроєм 10 і подаються на вхід підсилювача низькочастотного сигналу 11. На виході підсилювача низькочастотного сигналу 11 отримують напругу Uтп про значення технологічного параметра. Якщо всі елементи 1-11, включаючи і простір 6, будуть мати номінальні характеристики, на виході підсилювача низькочастотного сигналу 11 отримаємо напругу Uтп, яка відповідає значенню еталонного впливу на вході. Зміна передаточних властивостей будь-якого елемента призведе до відхилення напруги Uтп від даного значення. Це значення Uтп можна відновити відповідною зміною передаточних властивостей будьякого елемента. Найбільш зручно це зробити зміною коефіцієнта підсилення підсилювача низькочастотного сигналу 11. Дана дія виконується автоматично. Напруга Uтп, що відповідає номінальним характеристикам всіх елементів і еталонному діянню, задається здавачем 16, який виробляє таке ж значення сигналу. Задаюче діяння поступає на додатковий вхід елемента порівняння 17, на від'ємний вхід якого надходить значення U тп з виходу підсилювача низькочастотного сигналу 11. Сигнал непогодження з виходу елемента порівняння 17 подається на вхід підсилювача 18, виконавчого елемента 19, регулюючого органа 20 і запам'ятовуючого пристрою 21, який за час, менший Dt, виконує зміну коефіцієнта підсилення в підсилювачі низькочастотного сигналу 11 та збереження встановленого режиму роботи на протязі часу Τ-Dt, де Τ - час одного оберту рухомої частини об'єкта. Автоматичне регулювання та збереження режиму роботи підсилювача низькочастотного сигналу виконують з статичною помилкою, яка не перевищує вимог до точності визначення технологічного параметра. При цьому передаточні властивості всього передавально-приймального тракту відновлюються і відбувається на відрізку часу Т-Dt вимірювання і передача технологічної інформації. Такий процес відбувається при кожному оберті рухомої частини об'єкта, що забезпечує високу точність передачі технологічної інформації. Підвищенню точності передачі технологічної інформації сприяє також і те, що вимірювання технологічного параметра, комутування виходу і входу перетворювача, позбавлення впливу на нього вимірюваного середовища, подачу еталонного впливу, генерування, модулювання, підсилення високочастотних коливань та перетворення їх у радіохвилю виконують засобами з мінімальним споживанням енергії, яка забезпечує стійку передачу технологічної інформації, а їх живлення здійснюють елементами, що періодично замінюють. Такі заходи зменшують дію власних перешкод в ланках генерування сигналів. Водночас це розв'язує проблему передачі енергії на обертові частини технологічних об'єктів. Запропонований спосіб автоматичної передачі технологічної інформації з обертової частини об'єкта на нерухому відрізняється від відомого значним підвищенням точності в даних умовах. Крім того, він розрахований на найбільш прості варіанти реалізації функціональних вузлів, що спрощує конструкцію, зменшує вартість та підвищує надійність апаратури. Для отримання порівняльних даних проводились дослідження двох варіантів апаратури. Конструктивно апаратура виконувалась у вигляді двох блоків: блок вимірювання технологічного параметра і блок передавача (призначений для встановлення на обертовій частині об'єкта). Блок передавача живиться від елементів, що періодично замінюються. Блок приймача встановлювався стаціонарно і живився від мережі змінного струму. Два варіанта апаратури, що реалізують відомий і запропонований спосіб, конструктивно являли собою одне ціле - два вказаних блоки. При реалізації відомого способу відмикалась комутація в блоці вимірювання технологічного параметра І передавача, а в блоці приймача роз'єднувався контур автоматичного регулювання коефіцієнта підсилення підсилювача низькочастотного сигналу. При реалізації запропонованого способу відновлювалась комутація виходу і входу перетворювача технологічного параметра та контур автоматичного регулювання коефіцієнта підсилення підсилювача низькочастотного сигналу. Вузли апаратури мали звичайні схемні рішення. В апаратурі був реалізований найбільш простий спосіб амплітудної модуляції високочастотного сигналу. Час регулювання системи автоматичного регулювання коефіцієнта підсилення підсилювача низькочастотного сигналу був забезпечений меншим Dt, а статична похибка регулювання - 1,5%. Така ж похибка забезпечувалась пристроєм збереження режиму роботи підсилювача низькочастотного сигналу на протязі часу Т-Dt, де Τ=0,28с. Те хнологічний параметр задавався в межах можливих змін у виробничих умовах. Простір між антенами змінювався в широких межах утримання можливих складових. Порівняльні експериментальні показники для способів автоматичної передачі технологічної інформації з обертової частини об'єкта на нерухому наведені у таблиці. Таблиця Спосіб автоматичної передачі технологічної інформації з Температури обертової частини об'є кта на нав колишнього нерухому середов ища, °С 1. Існуючий +5...+45 2. 3апропонов аний +5...+45 Діапазони зміни Запиленості Відносної нав колишнього в ологості 3 середов ища, мг/м пов ітря, % до 10 50...98 до 10 50...98 Наближення металев их мас, людини, м 0,5...2,5 0,5...2,5 Відносна похибка передачі технологічної інформації, % ±14,87 ±2,71 Як видно з таблиці, запропонований спосіб автоматичної передачі технологічної інформації з обертової частини об'єкта на нерухому дозволяє значно підвищити точність в умовах широких змін дестабілізуючих факторів. Література 1. Основы радио и электроники / Под ред. В.Л.Эверитта. Пер. с англ. -М.: Профтехиздат, 1962. -804с. 2. Основы радиоуправления / Под ред. В.А.Вейцеля и В.Н.Типугина -М.: Сов. радио, 1973.-464с. 3. Нефедов Е.И. Радиоэлектроника наших дней - М: Наука, 1986. -192с. - (Серия "Наука и технический прогресс").
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for automatic transmission of technological information from rotary part of the object to immovable part
Автори англійськоюKondratets Vasyl Oleksandrovych
Назва патенту російськоюСпособ автоматической передачи информации с вращающейся части объекта на неподвижную
Автори російськоюКондратец Василий Александрович
МПК / Мітки
МПК: G08C 17/00, E02F 3/18, E02F 3/88
Мітки: автоматичної, частини, обертової, інформації, передачі, спосіб, нерухому, об'єкта
Код посилання
<a href="https://ua.patents.su/3-68812-sposib-avtomatichno-peredachi-informaci-z-obertovo-chastini-obehkta-na-nerukhomu.html" target="_blank" rel="follow" title="База патентів України">Спосіб автоматичної передачі інформації з обертової частини об’єкта на нерухому</a>
Спосіб передачі дискретної інформації в умовах широкосмугової модуляції
Номер патенту: 5439
Опубліковано: 15.03.2005
Автори: Кривогубченко Денис Сергійович, Зралко Олег Гальфонович, Кулик Анатолій Ярославович
МПК: H03M 13/00
Мітки: інформації, спосіб, дискретної, умовах, передачі, широкосмугової, модуляції
Формула / Реферат:
Спосіб передачі дискретної інформації в умовах широкосмугової модуляції, що включає зчитування байтів дискретної інформації з носія, перетворення його на послідовний код і передання до каналу зв'язку, який відрізняється тим, що на передавальному боці сигнал логічної одиниці перетворюють на кодову комбінацію функції Хаара, а на приймальному ідентифікують прийняту з каналу передачі інформації кодову комбінацію; порівнюють отриману кодову...
Спосіб високошвидкісної багатоканальної передачі інформації з адаптацією смуги частот передаваного сигналу по цифрових абонентських лініях
Номер патенту: 37602
Опубліковано: 15.05.2001
Автори: Панфілов Іван Павлович, Ляховецький Леонід Михайлович, Балашов Віталій Олександрович
МПК: H04K 1/10
Мітки: передаваного, частот, передачі, багатоканальної, цифрових, лініях, смуги, спосіб, сигналу, високошвидкісної, абонентських, адаптацією, інформації
Формула / Реферат:
Спосіб високошвидкісної багатоканальної передачі інформації з адаптацією смуги частот сигналу, що передається по цифрових абонентських лініях, який полягає в оптимальному розподілі інформації, що передається по каналах багатоканального модему, і у виборі смуги частот групового сигналу за результатами вимірювань коефіцієнтів передачі та потужності адитивних завад у каналах модему, який відрізняється тим, що оптимальний розподіл інформації, що...
Спосіб передачі інформації по радіоканалу зі змінною швидкістю
Номер патенту: 56610
Опубліковано: 15.05.2003
Автор: Загорулько Олександр Миколайович
МПК: H04B 7/00
Мітки: спосіб, інформації, швидкістю, змінною, передачі, радіоканалу
Формула / Реферат:
Спосіб передачі інформації по радіоканалу зі змінною швидкістю в радіолініях космічних систем, обладнаних автономними системами навігації, який відрізняється тим, що сигнали від джерела інформації до передавального пристрою проходять через керований буферний запам’ятовуючий пристрій, зчитування інформації з якого здійснюється зі змінною, в залежності від довжини радіолінії, оптимальною з точки зору енергетичних характеристик сигналу на вході...
Спосіб збору і передачі супутникової інформації
Номер патенту: 68962
Опубліковано: 16.08.2004
Автори: Богом'я Володимир Іванович, Козелков Сергій Вікторович, Ставицький Сергій Дмитрович, Явтушенко Анатолій Миколайович
МПК: B64G 1/24
Мітки: спосіб, збору, супутникової, інформації, передачі
Формула / Реферат:
Спосіб збору і передачі супутникової інформації, при якому завантажують у базу даних цифрової обчислювальної машини отриману заявку на збір супутникової інформації, розраховують значення прогнозу руху штучного супутника Землі, розраховують значення обмежень за станом бортової апаратури, розраховують значення обмежень за технологічними даними наземної станції, розраховують значення зони огляду наземної станції, створюють програму граничного...
Спосіб формування, передачі та приймання додаткової інформації у системі телезв’язку pal
Номер патенту: 47610
Опубліковано: 15.07.2002
Автор: Яцун Андрій Михайлович
МПК: H04N 15/00
Мітки: інформації, спосіб, передачі, додаткової, формування, приймання, системі, телезв'язку
Формула / Реферат:
Спосіб формування, передачі та приймання додаткової інформації у системі телезв'язку PAL, який заснований на тому, що у спектрі піднесучої сигналу яскравості одного з зображень стереоскопічної пари одночасно формуються та передаються основні червоний і синій хроматичні сигнали цього ж зображення стереоскопічної пари та додаткові зелений і червоний сигнали кольору іншого зображення стереоскопічної пари, який відрізняється тим, що у...
Попередній патент: Пристрій для підводного збирання і видалення забруднюючих речовин
Наступний патент: Спосіб виготовлення карбідокремнієвих виробів на алюмосилікатній зв’язці
Випадковий патент: Композиція для лікування цукрового діабету 2 типу