Вантажозахоплювальний пристрій
Номер патенту: 70813
Опубліковано: 15.10.2004
Автори: Боярченко Леонід Федосійович, Баранов Михайло Григорович, Ірха Віктор Миколайович
Формула / Реферат
1. Вантажозахоплювальний пристрій до підіймальних кранів, що містить траверсу і чотирикутну раму, яка утримує чотири пари лап з горизонтальними підхоплювачами, який відрізняється тим, що оснащений телескопічною рамою, виконаною з можливістю зміни її загального габариту по ширині, причому лапи виконані телескопічними з можливістю повороту навколо своєї осі, а також пристрій оснащений електромагнітом з осердям, що втягується, рейковим зачепленням і пружинами зворотного ходу, а рама пристрою виконана зі змінною шириною за рахунок оснащення її поперечними телескопічними пристроями.
2. Пристрій за п. 1, який відрізняється тим, що лапи виконані телескопічними з можливістю повороту на кут 90°, а їх підхоплювачі у початковому положенні розташовані поперек захопленого вантажу.
3. Пристрій за пп. 1, 2, який відрізняється тим, що телескопічні лапи встановлені на кінцях консолі телескопічної рами.
Текст
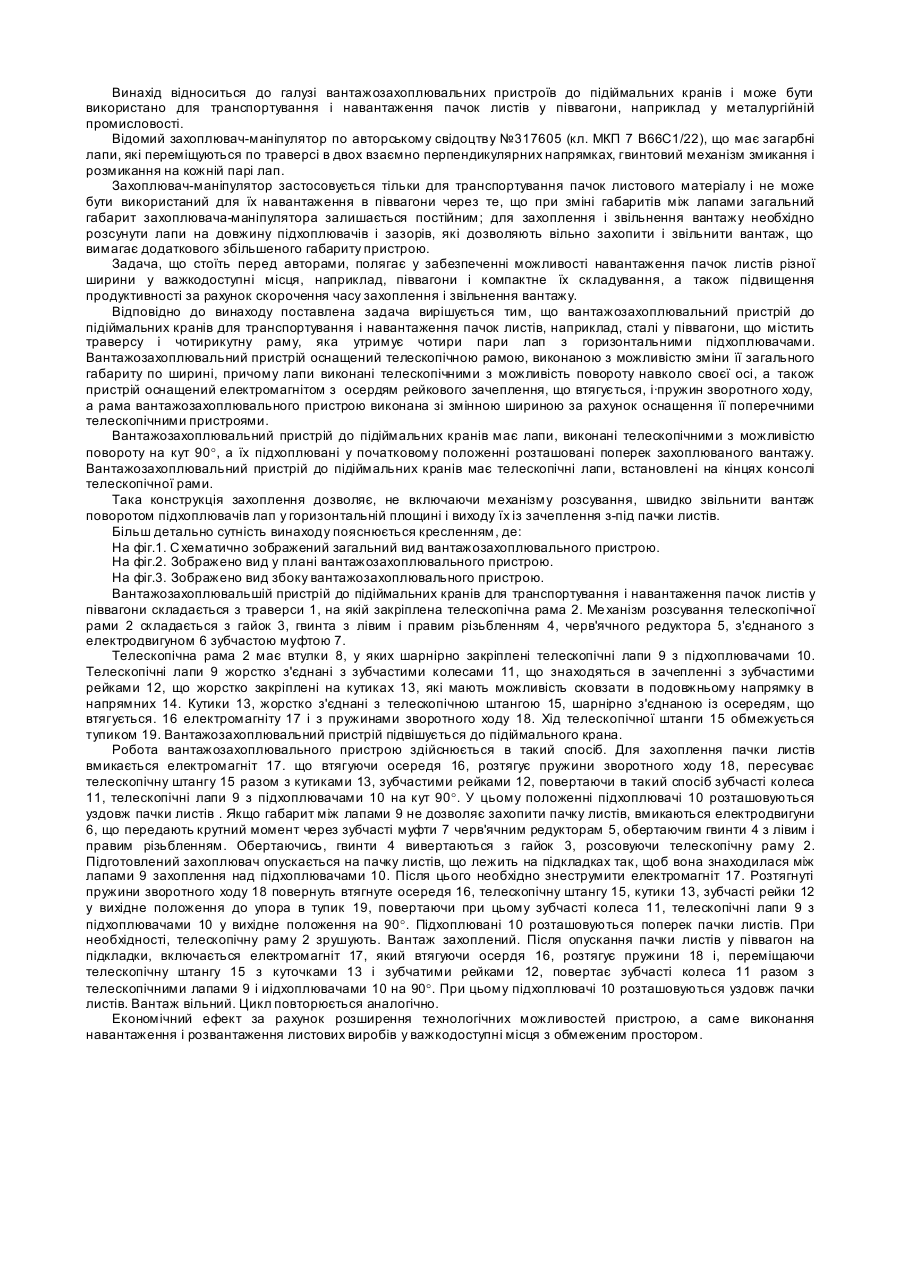
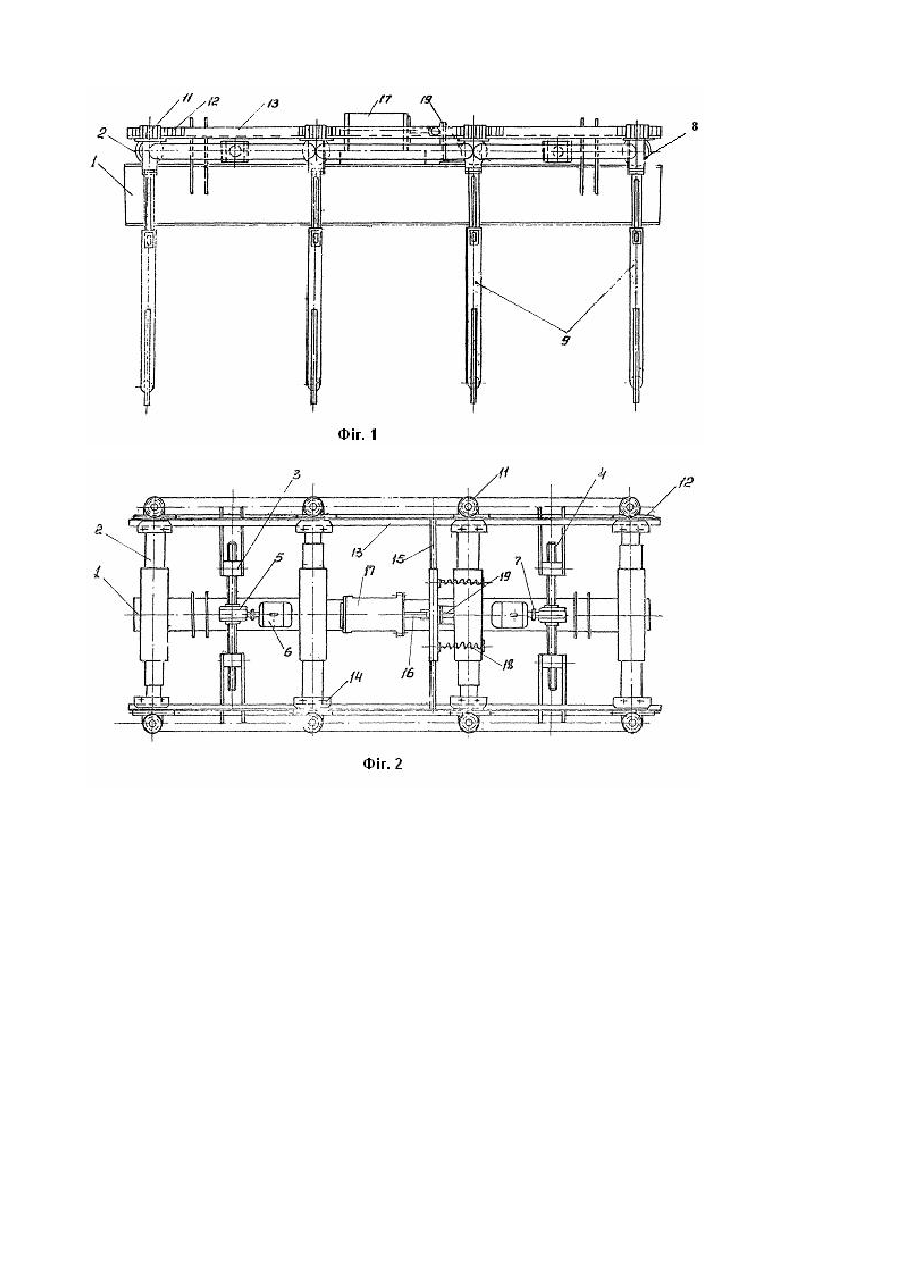
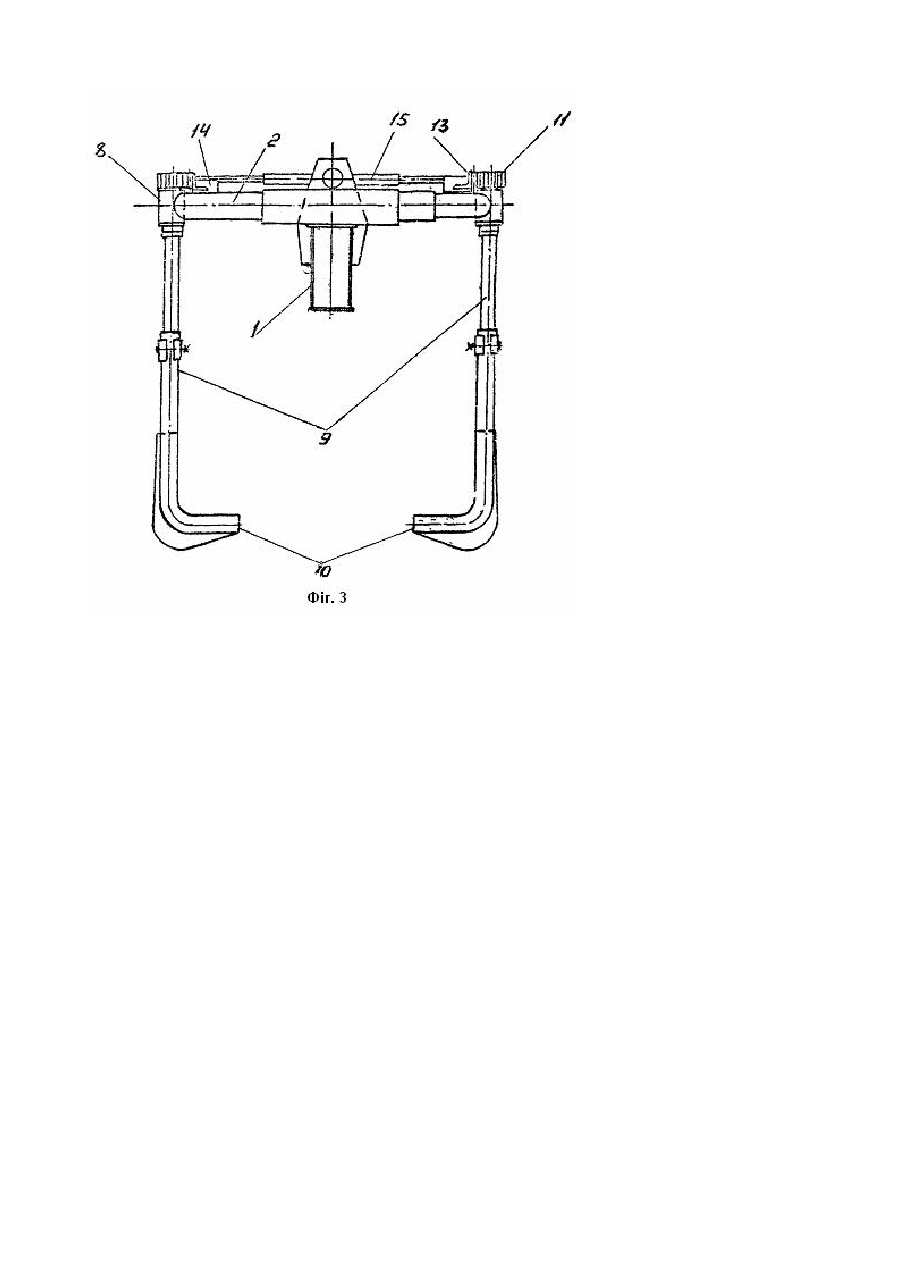
Винахід відноситься до галузі вантажозахоплювальних пристроїв до підіймальних кранів і може бути використано для транспортування і навантаження пачок листів у піввагони, наприклад у металургійній промисловості. Відомий захоплювач-маніпулятор по авторському свідоцтву №317605 (кл. МКП 7 В66С1/22), що має загарбні лапи, які переміщуються по траверсі в двох взаємно перпендикулярних напрямках, гвинтовий механізм змикання і розмикання на кожній парі лап. Захоплювач-маніпулятор застосовується тільки для транспортування пачок листового матеріалу і не може бути використаний для їх навантаження в піввагони через те, що при зміні габаритів між лапами загальний габарит захоплювача-маніпулятора залишається постійним; для захоплення і звільнення вантажу необхідно розсунути лапи на довжину підхоплювачів і зазорів, які дозволяють вільно захопити і звільнити вантаж, що вимагає додаткового збільшеного габариту пристрою. Задача, що стоїть перед авторами, полягає у забезпеченні можливості навантаження пачок листів різної ширини у важкодоступні місця, наприклад, піввагони і компактне їх складування, а також підвищення продуктивності за рахунок скорочення часу захоплення і звільнення вантажу. Відповідно до винаходу поставлена задача вирішується тим, що вантажозахоплювальний пристрій до підіймальних кранів для транспортування і навантаження пачок листів, наприклад, сталі у піввагони, що містить траверсу і чотирикутну раму, яка утримує чотири пари лап з горизонтальними підхоплювачами. Вантажозахоплювальний пристрій оснащений телескопічною рамою, виконаною з можливістю зміни її загального габариту по ширині, причому лапи виконані телескопічними з можливість повороту навколо своєї осі, а також пристрій оснащений електромагнітом з осердям рейкового зачеплення, що втягується, і·пружин зворотного ходу, а рама вантажозахоплювального пристрою виконана зі змінною шириною за рахунок оснащення її поперечними телескопічними пристроями. Вантажозахоплювальний пристрій до підіймальних кранів має лапи, виконані телескопічними з можливістю повороту на кут 90°, а їх підхоплювані у початковому положенні розташовані поперек захоплюваного вантажу. Вантажозахоплювальний пристрій до підіймальних кранів має телескопічні лапи, встановлені на кінцях консолі телескопічної рами. Така конструкція захоплення дозволяє, не включаючи механізму розсування, швидко звільнити вантаж поворотом підхоплювачів лап у горизонтальній площині і виходу їх із зачеплення з-під пачки листів. Більш детально сутність винаходу пояснюється кресленням, де: На фіг.1. С хематично зображений загальний вид вантажозахоплювального пристрою. На фіг.2. Зображено вид у плані вантажозахоплювального пристрою. На фіг.3. Зображено вид збоку вантажозахоплювального пристрою. Вантажозахоплювальшій пристрій до підіймальних кранів для транспортування і навантаження пачок листів у піввагони складається з траверси 1, на якій закріплена телескопічна рама 2. Ме ханізм розсування телескопічної рами 2 складається з гайок 3, гвинта з лівим і правим різьбленням 4, черв'ячного редуктора 5, з'єднаного з електродвигуном 6 зубчастою муфтою 7. Телескопічна рама 2 має втулки 8, у яких шарнірно закріплені телескопічні лапи 9 з підхоплювачами 10. Телескопічні лапи 9 жорстко з'єднані з зубчастими колесами 11, що знаходяться в зачепленні з зубчастими рейками 12, що жорстко закріплені на кутиках 13, які мають можливість сковзати в подовжньому напрямку в напрямних 14. Кутики 13, жорстко з'єднані з телескопічною штангою 15, шарнірно з'єднаною із осередям, що втягується. 16 електромагніту 17 і з пружинами зворотного ходу 18. Хід телескопічної штанги 15 обмежується тупиком 19. Вантажозахоплювальний пристрій підвішується до підіймального крана. Робота вантажозахоплювального пристрою здійснюється в такий спосіб. Для захоплення пачки листів вмикається електромагніт 17. що втягуючи осередя 16, розтягує пружини зворотного ходу 18, пересуває телескопічну штангу 15 разом з кутиками 13, зубчастими рейками 12, повертаючи в такий спосіб зубчасті колеса 11, телескопічні лапи 9 з підхоплювачами 10 на кут 90°. У цьому положенні підхоплювачі 10 розташовуються уздовж пачки листів . Якщо габарит між лапами 9 не дозволяє захопити пачку листів, вмикаються електродвигуни 6, що передають крутний момент через зубчасті муфти 7 черв'ячним редукторам 5, обертаючим гвинти 4 з лівим і правим різьбленням. Обертаючись, гвинти 4 вивертаються з гайок 3, розсовуючи телескопічну раму 2. Підготовлений захоплювач опускається на пачку листів, що лежить на підкладках так, щоб вона знаходилася між лапами 9 захоплення над підхоплювачами 10. Після цього необхідно знеструмити електромагніт 17. Розтягнуті пружини зворотного ходу 18 повернуть втягнуте осередя 16, телескопічну штангу 15, кутики 13, зубчасті рейки 12 у вихідне положення до упора в тупик 19, повертаючи при цьому зубчасті колеса 11, телескопічні лапи 9 з підхоплювачами 10 у вихідне положення на 90°. Підхоплювані 10 розташовуються поперек пачки листів. При необхідності, телескопічну раму 2 зрушують. Вантаж захоплений. Після опускання пачки листів у піввагон на підкладки, включається електромагніт 17, який втягуючи осердя 16, розтягує пружини 18 і, переміщаючи телескопічну штангу 15 з куточками 13 і зубчатими рейками 12, повертає зубчасті колеса 11 разом з телескопічними лапами 9 і иідхоплювачами 10 на 90°. При цьому підхоплювачі 10 розташовуються уздовж пачки листів. Вантаж вільний. Цикл повторюється аналогічно. Економічний ефект за рахунок розширення технологічних можливостей пристрою, а саме виконання навантаження і розвантаження листових виробів у важкодоступні місця з обмеженим простором.
ДивитисяДодаткова інформація
Назва патенту англійськоюLoad gripping device
Автори англійськоюBoiarchenko Leonid Fedosiovych, Irkha Viktor Mykolaiovych
Назва патенту російськоюГрузозахватное приспособление
Автори російськоюБоярченко Леонид Федосьевич, Ирха Виктор Николаевич
МПК / Мітки
МПК: B66C 1/22
Мітки: вантажозахоплювальний, пристрій
Код посилання
<a href="https://ua.patents.su/3-70813-vantazhozakhoplyuvalnijj-pristrijj.html" target="_blank" rel="follow" title="База патентів України">Вантажозахоплювальний пристрій</a>
Вантажозахоплювальний механізм
Номер патенту: 429
Опубліковано: 12.11.1999
Автори: Власенко Віктор Іванович, Омельченко Володимир Іванович, Карпов Володимир Петрович, Анохін Юрій Олександрович
Мітки: вантажозахоплювальний, механізм
Формула / Реферат:
1. Вантажозахоплювальний механізм, що містить два шарнірно сполучених важелі з вантажозахоплювальними кінцями, який відрізняється тим, що один із важелів виконаний із вушком з боку, протилежному вантажозахоплювальному кінцю цього важеля, з можливістю-з'єднання з вантажопідйомним механізмом, а другий важіль постачений регульованим фіксатором відносного кута повороту зазначених важелів у їхньому шарнірному з'єднанні.2....
Пристрій для підйому вантажів з грунту водойм
Номер патенту: 23686
Опубліковано: 02.06.1998
Автор: Квач Дмитро Петрович
МПК: B63C 7/20
Мітки: грунту, пристрій, підйому, водойм, вантажів
Формула / Реферат:
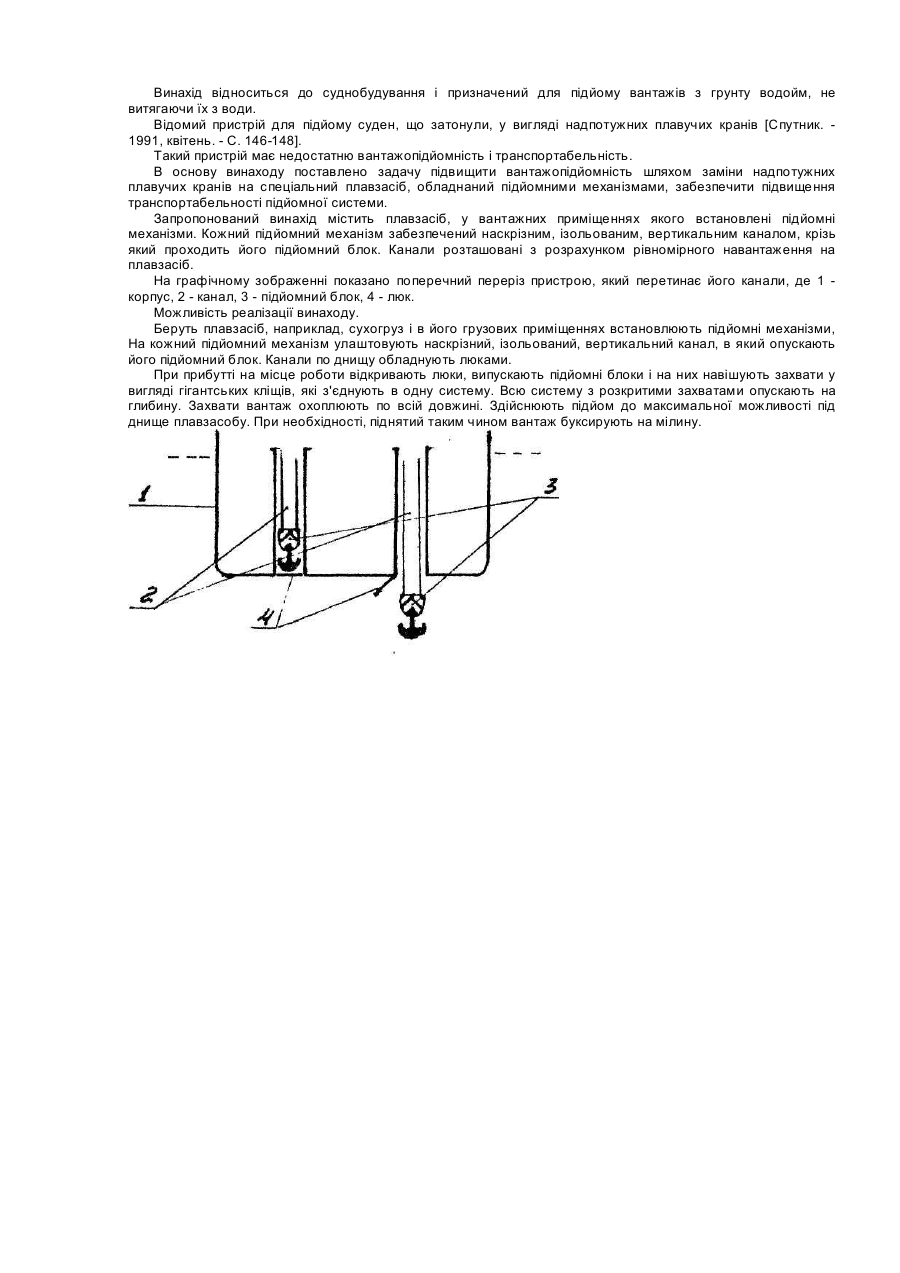
Пристрій для підйому вантажів з грунту водойм, не витягаючи їх з води, що містить плавзасіб і не менше двох підйомних механізмів, який відрізняється тим, що у вантажних приміщеннях плавзасобу виконані наскрізні, ізольовані, вертикальні канали на кожний підйомний механізм.
Буферний пристрій
Номер патенту: 53300
Опубліковано: 15.01.2003
Автори: Турушин Володимир Олександрович, Клімчук Олександр Сергійович, Нікішкін Юрій Анатолійович
МПК: B66C 7/00
Формула / Реферат:
Буферний пристрій, що містить шток і пружину, встановлені на верхніх частинах торців кінцевих балок двох кранів, який відрізняється тим, що шток, виконаний у вигляді клина, закріпленого нерухомо і консольно на верхній горизонтальній площині кінцевої балки одного крана уздовж подовжньої осі підкранової рейки, взаємодіє зі штоком іншого крана, виконаним у вигляді двох важелів, одні кінці яких є розвідними, а інші змонтовано шарнірно на...
Сортувальний пристрій коливального типу
Номер патенту: 63309
Опубліковано: 15.01.2004
Автор: Хомусько Тетяна Олександрівна
Мітки: коливального, типу, сортувальний, пристрій
Формула / Реферат:
1. Сортувальний пристрій коливального типу, що містить короб з розміщеним у ньому решітчастим полотном, шарнірно підвішений на штангах, і кінематично зв'язаний з коливальною системою, що включає ексцентриковий вібратор, взаємодіючий за допомогою шатунів з коробом, який відрізняється тим, що під коробом встановлено додатковий короб з решітчастим полотном, короби підвішені на відстані один від одного, більшій ніж амплітуда коливання коробів, що...
Пристрій для обробітку грунту в ряду рослин
Номер патенту: 67583
Опубліковано: 15.06.2004
Автори: Фришев Сергій Георгійович, Шатров Руслан Володимирович, Демидко Михайло Омелянович
МПК: A01B 39/00
Мітки: рослин, пристрій, ряду, обробітку, грунту
Формула / Реферат:
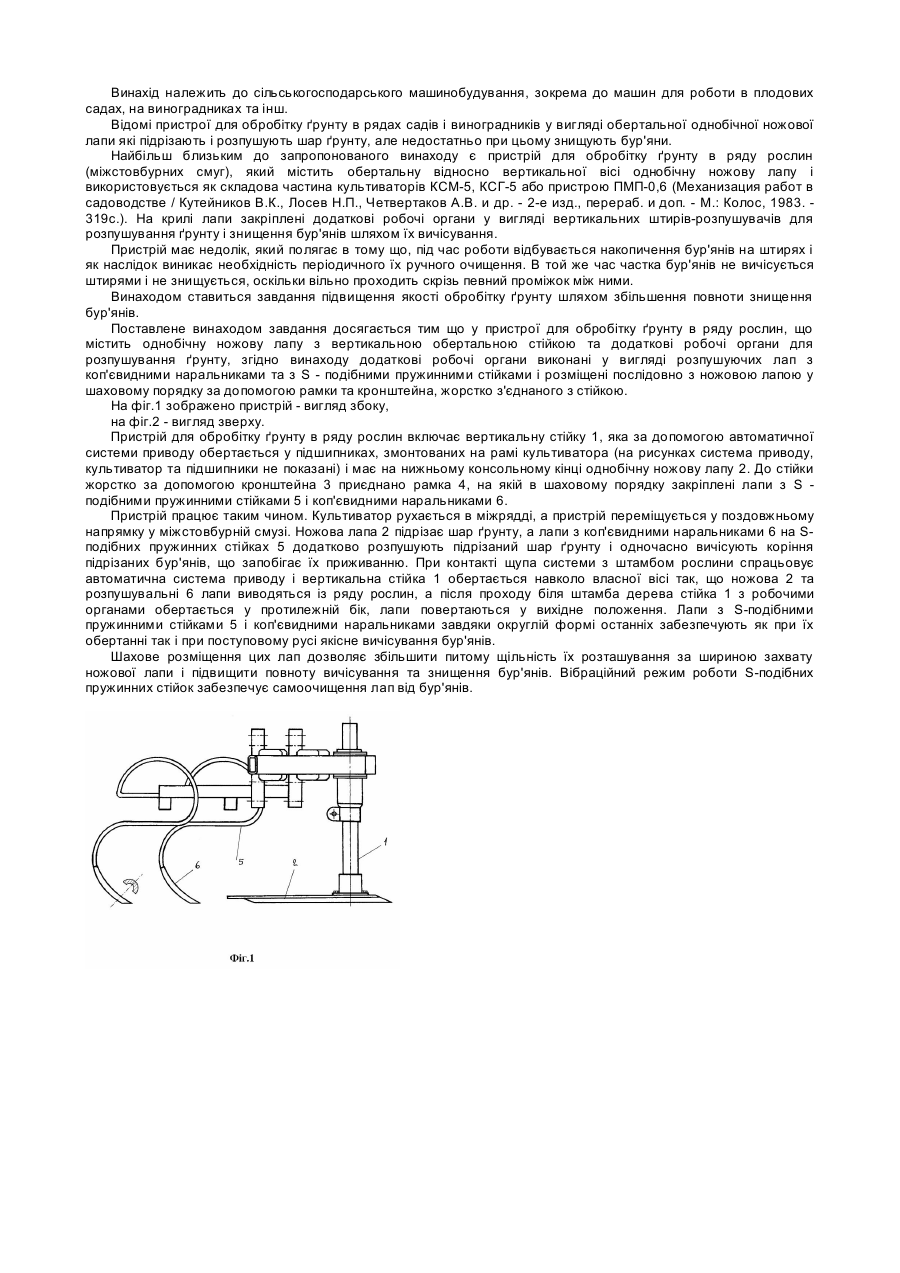
Пристрій для обробітку грунту в ряду рослин, що містить однобічну ножову лапу з вертикальною обертальною стійкою та додаткові робочі органи для розпушування грунту, який відрізняється тим, що додаткові робочі органи виконані у вигляді розпушуючих лап з списоподібними наральниками та з S-подібними пружинними стійками і розміщені послідовно з ножовою лапою у шаховому порядку за допомогою рамки та кронштейна, жорстко з'єднаного з стійкою.
Попередній патент: Кліщовий розвантажувальний пристрій
Наступний патент: Карусельне вітроколесо
Випадковий патент: Поліметалевий каталізатор риформінгу та спосіб його одержання