Електромагнітний датчик для контролю величини і напрямку нахилу конструкцій
Номер патенту: 77761
Опубліковано: 15.01.2007
Автори: Шокарев Віктор Семенович, Хілько Сергій Володимирович, Чаплигін Валерій Іванович
Формула / Реферат
Електромагнітний датчик для контролю величини і напрямку нахилу конструкцій, який складається із герметичного корпусу з закріпленою в ньому на верхній основі підвіскою з феромагнітним циліндричним маятником чотирьох стержневих індуктивних перетворювачів, розташованих в одній площині в двох взаємно перпендикулярних напрямках до поверхні маятника, підключених виходами до пристрою обробки, вимірювання і відображення величини індуктивності перетворювачів, який відрізняється тим, що поверхневий шар матеріалу маятника має товщину
![]()
де
δ- глибина проникнення електромагнітного поля в матеріал маятника;
![]() - відповідно магнітна проникність і електропровідність поверхневого шару матеріалу маятника;
- відповідно магнітна проникність і електропровідність поверхневого шару матеріалу маятника;
![]() - магнітна проникність вакууму;
- магнітна проникність вакууму;
f - частота струму збудження індуктивних перетворювачів;
![]() - константа, має постійну магнітну проникність
- константа, має постійну магнітну проникність ![]() .
.
Текст
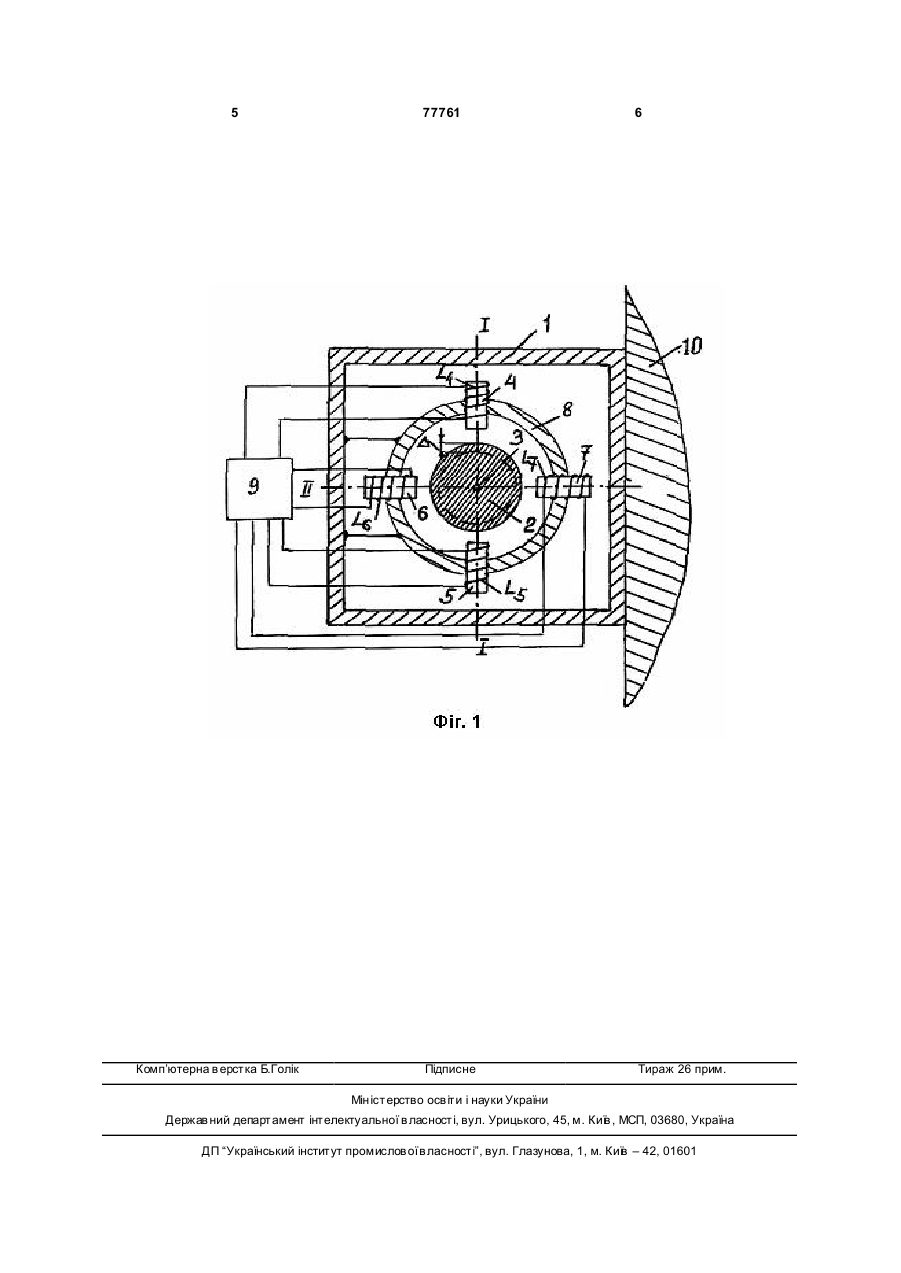
Електромагнітний датчик для контролю величини і напрямку нахилу конструкцій, який складається із герметичного корпусу з закріпленою в ньому на верхній основі підвіскою з феромагнітним циліндричним маятником чотирьох стержневих індуктивних перетворювачів, розташованих в одній площині в двох взаємно перпендикулярних напря мках до поверхні маятника, підключених виходами до пристрою обробки, вимірювання і відображення величини індуктивності перетворювачів, який відрізняється тим, що поверхневий шар матеріалу маятника має товщин у Винахід відноситься до області вимірювальної техніки і може бути використаний для контролю величини і напряму нахилу конструкцій. Відомий магнітний датчик нахилу, який містить корпус, заповнений магнітною речовиною, в яку занурено постійний магніт, з зовнішньої сторони корпусу закріплено чутливий елемент, який реагує на зміну магнітного потоку. [Патент 4803426, США, МКІ 4 C0ІB 7/14. Реферативний журнал. ВИНИТИ № 1, 1990, стр. 83]. При використанні датчик закріплюють на об'єкті, що контролюється, при його нахилі магніт зміщується відносно чутливого елементу, величина магнітного потоку, зчепленого з чутливим елементом змінюється, змінюється і сигнал з елементу, по величині зміни сигналу визначають кут нахилу. Відомий магнітний датчик нахилу має недопік: недостатню точність контролю кутів нахилу, так як щільність окладу ферорідини з бігом часу змінюється, крім того, датчик має обмежене застосування, він не дозволяє визначити напрям нахилу. Найбільш близький по конструктивному виконанню і принципу роботи електромагнітний датчик для контролю величини і напряму нахилу конструкцій, який складається із герметичного корпусу з закріпленою у ньому на верхній основі підвіскою з феромагнітним циліндричним маятником чотирьох стержневих індуктивних перетворювачів, розташованих по периметру в одній площині в двох взаємно перпендикулярних напрямках до поверхні маятника, підключених ви ходами до пристрою обробки .вимірювання і відображення величини індуктивності перетворювачів, [УДК 622 06. Збірник наукових праць НГА України № 9, Том 2. 1 m D g D mo fp (19) UA (11) 77761 (13) де δ- глибина проникнення електромагнітного поля в матеріал маятника; m D ; g D - відповідно магнітна проникність і електропровідність поверхневого шару матеріалу маятника; m o - магнітна проникність вакууму; f - частота стр уму збудження індуктивних перетворювачів; p - константа, має постійну магнітну проникність mD . C2 D³ d= 3 77761 4 Дніпропетровськ: РИК НГА України, 2000.- 227 с., Електромагнітний датчик для контролю велистр. 10. Прототип]. чини і напряму нахилу конструкцій [фіг. 1] складаПри використанні електромагнітний датчик зається із герметичного корпусу 1, наприклад, який кріплюють на об'єкті, кут нахилу якого контролюмає по периметру форму квадрата в площині пеється. Всі вимірювальні перетворювачі розташорерізу, перпендикулярної до вертикальної осі її вують симетрично відносно маятника на одній симетрії, підвіски 2 з феромагнітним циліндричним відстані, з їх ви ходів знімаються одинакові сигнамаятником 3, закріпленої до верхньої основи [на ли. При змінюванні величини відстані між перефіг.1 не показане] корпусу 1, стержневі індуктивні творювачами і маятником за рахунок нахилу об'єкперетворювачі 4, 5, 6, 7, розташованих в одній та сигнали з перетворювачів змінюються, аналіз площині в двох взаємно перпендикулярних напрявеличин сигналів і характеру їх зміни дозволяє мках 1, 11 до поверхні маятника 3, виходом підпісля обробки в пристою вимірювання і відобраключених до пристрою обробки, вимірювання і ження результатів визначити величину і напрям відображення величини індуктивності перетворюнахилу конструкцій. вачів, поверхневий шар матеріалу маятника, 3 Недоліком електромагнітного датчика явля1 ється то, що функція його перетворення не постійтовщиною D ³ d = , де d - глибина m D g Dm 0 fp на, так як феромагнітний маятник при виконанні проникнення електромагнітного поля в матеріал партії датчиків має великі розбіжності електромагнітних властивостей : магнітної проникності і струмаятника 3; m D ; g D - відповідно магнітна проникктури поверхневого шару. Це обмежує область ність і електропровідність поверхневого шару майого практичного застосування, наприклад, він не теріалу маятника 3; m 0 - магнітна проникність ваможе бути використаний в вимірювальних інформаційних системах, коли використовуються сотні датчиків, що установлюються на одному об'єкті. Задача винаходу - досягнення технічного результату, який приводить до підвищення точності контролю електромагнітним датчиком і поширення області його практичного застосування. Технічний результат досягається тим, що в конструкції електромагнітного датчика використовується маятник, поверхневий шар матеріалу якого товщиною D ³ d = 1 , де d - глибина m D g D f pm 0 проникнення електромагнітного поля; m D ; g D відповідно магнітна проникність і електропровідність поверхневого шару матеріалу маятника; m 0 магнітна проникність вакууму; f - частота стр уму збудження індуктивних перетворювачів; p - константа, має постійну магнітну проникність m D . Порівнювальний аналіз технічного рішення, що заявляється, з прототипом показує, що воно відрізняється тим, що містить маятник, поверхневий шар матеріалу якого товщиною D ³= d 1 , d - глибина проникнення елеm D g Dm 0 fp ктромагнітного поля, m D ; g D - відповідно магнітна проникність і електропровідність поверхневого шару матеріалу маятника, m 0 - магнітна проникність вакууму, f - частота струму збудження індуктивних перетворювачів; p - константа, має постійну магнітну проникність m D . Це дозволяє вважати, що розроблене технічне рішення містить елемент новизни. При пошуках по науково-технічним і патентним джерелам не виявлені технічні рішення, які містять відрізняючу ознаку заявляємого рішення, тобто воно має істотні відміни. На фіг.1 показана конструкція розробленого електромагнітного датчика контролю величини і напряму нахилу конструкції. куум у; f - часто та стр уму збудження індуктивних перетворювачів 4; 5; 6; 7; p - константа, має постійну магнітну проникність m D . При використанні електромагніного датчика він закріплюється корпусом 1 до конструкції 10 так, щоб його вертикальна ось симетрії співпадала з напрямом гравітаціонної вертикалі, тобто підвіски 2. Вимірюють пристроєм 9 початкові значення індуктивностей L4; L5; L6; L7 індуктивних перетворювачів 4, 5, 6, 7. При виникненні нахилу конструкції значення початкових індуктивностей L4; L5; L6; L7 зміниться на величину DL 4 , DL 5 , D L 6 , D L7 , при цьому в залежності від характеру нахилу конструкції і його напряму значення DL 4 , DL 5 , D L6 , D L 7 відрізняються по величині і знаку, що дозволяє визначити напрям і величину нахилу конструкції 10 пристроєм 9 з використання програми розрахунку. Особливістю розробленої конструкції електромагнітного датчика являється то, що його поверхневий шар матеріалу має постійну магнітну проникність , що досягається зміцненням його поверхневого шару механічною або другою технологічною операцією [см. А. С. № 1435543 , Бюл. № 41 , 1988]. Це дозволяє при виготовленні електромагнітних датчиків здобути практично постійної їх функції перетворення, тобто в залежності зміни індуктивностей перетворювачів 4, 5, 6, 7 від зміни відстані між їх полюсами і поверхнею маятника. Це підвищує точність розрахунку величини і напряму нахилу при визначенні величини і напряму нахилу конструкції на основі розробленого електромагнітного датчика. Крім того значно поширюється область практичного застосування електромагнітного датчика за рахунок можливості його використання в вимірювальне інформаційних системах. 5 Комп’ютерна в ерстка Б.Голік 77761 6 Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюElectromagnetic transducer for monitoring the magnitude and direction of inclination of a construction structure
Автори англійськоюShokarev Viktor Semenovych, Shokariev Viktor Semenovych, Chaplyhin Valerii Ivanovych, Khilko Serhii Volodymyrovych
Назва патенту російськоюЭлектромагнитный датчик для контроля величины и направления наклона строительной конструкции
Автори російськоюШокарев Виктор Семенович, Чаплыгин Валерий Иванович, Хилько Сергей Владимирович
МПК / Мітки
МПК: G01B 21/00, G01B 7/14
Мітки: датчик, контролю, величини, нахилу, напрямку, конструкцій, електромагнітний
Код посилання
<a href="https://ua.patents.su/3-77761-elektromagnitnijj-datchik-dlya-kontrolyu-velichini-i-napryamku-nakhilu-konstrukcijj.html" target="_blank" rel="follow" title="База патентів України">Електромагнітний датчик для контролю величини і напрямку нахилу конструкцій</a>
Датчик кутових переміщень з електронною схемою визначення кута нахилу
Номер патенту: 50687
Опубліковано: 15.10.2002
Автори: Павленко Юрій Федорович, Галицький Анатолій Петрович
МПК: G01P 15/13
Мітки: електронною, кутових, датчик, переміщень, кута, схемою, визначення, нахилу
Формула / Реферат:
Датчик кутових переміщень, що містить механічну частину, що складається з маятника, підвішеного на, щонайменше, одній балці, двох котушок індуктивності, що входять до складу датчиків відхилення маятника від середнього положення, і двигуна лінійного типу, що має котушку індуктивності, розташовану на маятнику, і два магніти з зустрічно орієнтованими полями, які розташовані з боків котушки і закріплені нерухомо, і електронну частину, що включає...
Магнітометричний датчик кута нахилу

Номер патенту: 11920
Опубліковано: 16.01.2006
Автори: Садовникова Олександра Володимирівна, Пономарьова Олена Анатоліївна, Ковшов Генадій Миколайович
МПК: G01C 9/00
Мітки: нахилу, датчик, магнітометричний, кута
Формула / Реферат:
Магнітометричний датчик кута нахилу, що містить корпус, котушку індуктивності, осердя, яке являє собою чутливий елемент датчика і має вигляд тонкої берилієвої струни з пермалоєвим покриттям, який відрізняється тим, що один кінець осердя закріплений, а другий - вільний.
Двокоординатний датчик кутів нахилу

Номер патенту: 35954
Опубліковано: 16.04.2001
Автори: Мрачковський Олег Дмитрович, Худяков Борис Сергійович
МПК: G01C 9/00
Мітки: кутів, датчик, двокоординатний, нахилу
Формула / Реферат:
1. Двокоординатний датчик кутів нахилу, що містить рухомий електрод, жорстко зв'язаний з контрольованим об'єктом, нерухомий електрод у вигляді грушоподібного маятника і вимірювальну схему, підключену до рухомого електрода, який відрізняється тим, що рухомий електрод виконаний у вигляді порожньої півсфери, в центрі якої підвішено грушоподібний маятник, а сама півсфера поділена на чотири рівних електрично ізольованих один від одного сферичних...
Електромагнітний спосіб визначення напрямку дії головних механічних напружень в поверхневому шарі феромагнітних матеріалів
Номер патенту: 7731
Опубліковано: 15.07.2005
Автори: Болотов Юрій Костянтинович, Чаплигін Валерій Іванович
МПК: G01L 1/12, G01N 27/00
Мітки: напружень, визначення, електромагнітний, шарі, спосіб, феромагнітних, поверхневому, дії, матеріалів, напрямку, головних, механічних
Формула / Реферат:
Електромагнітний спосіб визначення напрямку дії головних механічних напружень в поверхневому шарі феромагнітних матеріалів, який полягає в тому, що вводять у взаємодію з ділянкою матеріалу, яка контролюється, електромагнітний датчик, що містить скріплені один над одним під кутом 90° два Π-подібних магнітопроводи, збуджуючий магнітопровід з обмоткою збудження, підключеною до джерела змінного струму, і вимірювальний магнітопровід з...
Електромагнітний спосіб визначення магнітної проникності в матеріалах конструкцій
Номер патенту: 77655
Опубліковано: 15.01.2007
Автори: Рудик Борис Андрійович, Дубовець Микола Оксентійович, Шокарев Віктор Семенович, Чаплигін Валерій Іванович
МПК: G01R 1/02, G01N 27/80
Мітки: визначення, матеріалах, конструкцій, проникності, спосіб, електромагнітний, магнітної
Формула / Реферат:
Електромагнітний спосіб визначення магнітної проникності в матеріалах конструкцій, який полягає в тому, що в матеріалі збуджують електромагнітне поле датчиком, який містить три скріплених паралельно один одному двополюсних магнітопроводи з розташованими на них обмотками збудження, який відрізняється тим, що використовують датчик, всі магнітопроводи якого виконані в формі частини кільця, обмотки збудження на крайніх магнітопроводах...
Попередній патент: Механізм хитання кристалізатора
Наступний патент: Електророзрядна ультрафіолетова лампа
Випадковий патент: Спосіб захисту та ремонту залізобетонних конструкцій