Датчик кутових переміщень з електронною схемою визначення кута нахилу
Номер патенту: 50687
Опубліковано: 15.10.2002
Автори: Павленко Юрій Федорович, Галицький Анатолій Петрович
Формула / Реферат
Датчик кутових переміщень, що містить механічну частину, що складається з маятника, підвішеного на, щонайменше, одній балці, двох котушок індуктивності, що входять до складу датчиків відхилення маятника від середнього положення, і двигуна лінійного типу, що має котушку індуктивності, розташовану на маятнику, і два магніти з зустрічно орієнтованими полями, які розташовані з боків котушки і закріплені нерухомо, і електронну частину, що включає в себе дві згадані котушки індуктивності датчиків відхилення, які живляться від генератора, суматор і схему виділення і масштабування вихідного сигналу датчика, який відрізняється тим, що електронна частина додатково містить два резистори і два конденсатори, за допомогою яких утворений міст змінного струму, що включає згадані котушки індуктивності датчиків відхилення, плечі якого з'єднані із суматором, і послідовно включені із суматором підсилювач-обмежувач і фазовий детектор, вихід останнього з яких з'єднаний із котушкою індуктивності двигуна, при цьому керуючий вхід фазового детектора з'єднаний із виходом генератора безпосередньо або через фазозсувний ланцюг.
Текст
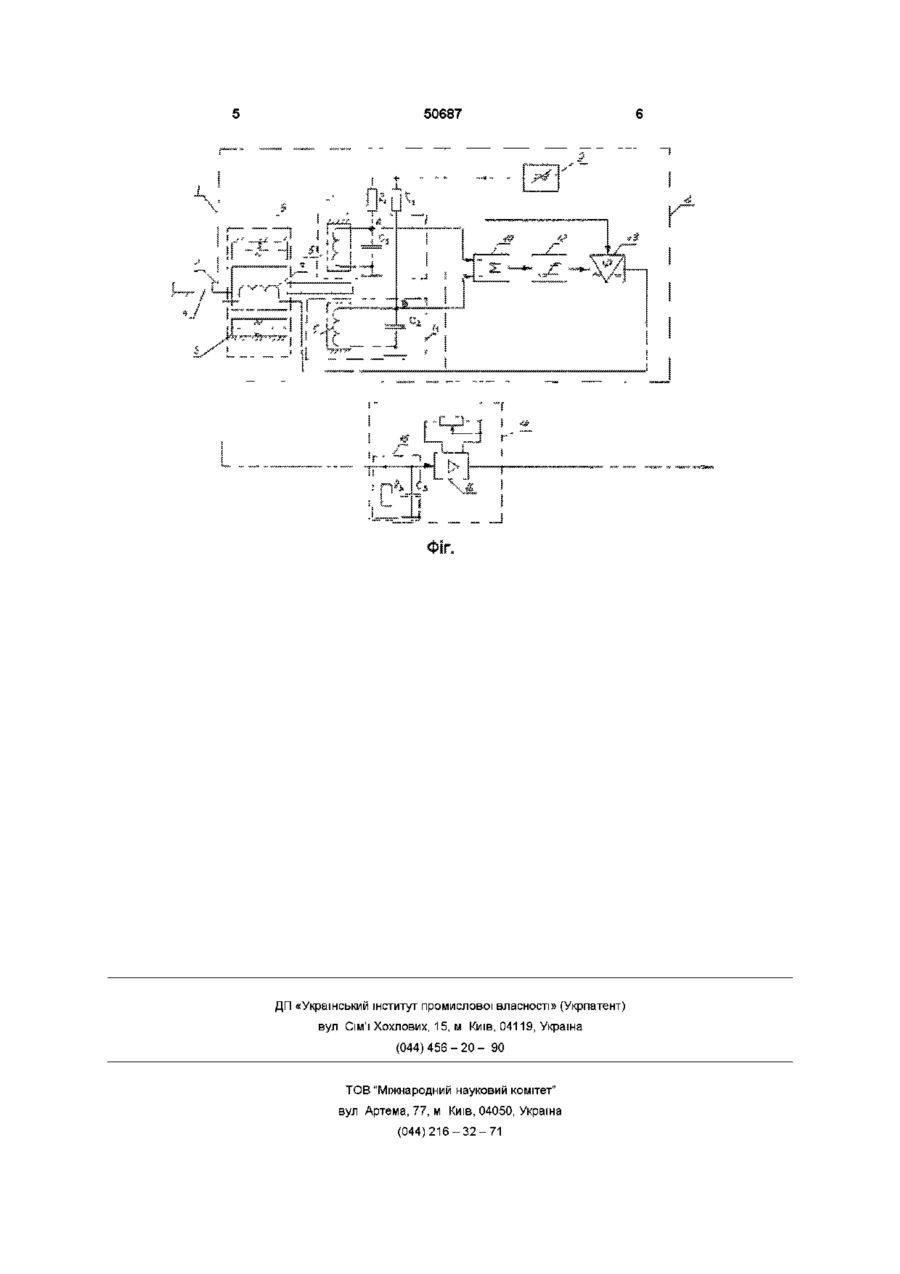
Датчик кутових переміщень, що містить механічну частину, що складається з маятника, підвішеного на, щонайменше, одній балці, двох котушок індуктивності, що входять до складу датчиків відхилення маятника від середнього положення, і двигуна ЛІНІЙНОГО типу, що має котушку індуктивності, розташовану на маятнику, і два магніти з зустрічно орієнтованими полями, які розташовані з боків котушки і закріплені нерухомо, і електронну частину, що включає в себе дві згадані котушки індуктивності датчиків відхилення, які живляться від генератора, суматор і схему виділення і масштабування вихідного сигналу датчика, який відрізняється тим, що електронна частина додатково містить два резистори і два конденсатори, за допомогою яких утворений міст змінного струму, що включає згадані котушки індуктивності датчиків відхилення, плечі якого з'єднані із суматором, і послідовно включені із суматором підсилювач-обмежувач і фазовий детектор, вихід останнього з яких з'єднаний із котушкою індуктивності двигуна, при цьому керуючий вхід фазового детектора з'єднаний із виходом генератора безпосередньо або через фазозсувний ланцюг Винахід відноситься до вимірювальної техніки, призначений для визначення кутових переміщень об'єктів і може бути використаний в різних галузях промисловості, у техніці і приладобудуванні Відомий датчик кутових переміщень, названий у найбільш близькому аналогу акселерометром, що містить механічну частину, яка складається з маятника, підвішеного на пружинному ПІДВІСІ, ЩО має щонайменше одну балку, двох індуктивних датчиків відхилення маятника від середнього положення і двигуна ЛІНІЙНОГО типу, що має котушку, розташовану на маятнику і два магніти з зустрічно орієнтованими полями, які розташовані з боків котушки і закріплені нерухомо, і електронну частину, що включає в себе дві згадані котушки індуктивності датчиків відхилення, заживлений від генератора, і з'єднані через два активних випрямляча з суматором, вихід якого з'єднаний з котушкою індуктивності ЛІНІЙНОГО двигуна, і схему виділення і масштабування вихідного сигналу датчика (див патент на корисну модель UA № 1206, бюл № 4, 2002р) приладу в нульове положення), - низька чутливість, обумовлена слабкою зміною сигналу датчика при ЗМІНІ положення маятника, що викликає необхідність великого посилення на постійному струмі в електронній схемі, що спричиняє збільшення погрішностей, спричинених різними дестабілізуючими факторами (температура, зміна напруги живлення і т п ), - наявність двох паралельних трактів обробки сигналу, що при їхній непогодженості під впливом дестабілізуючих факторів приводить до появи помилки, - складність у виготовленні і налагодженні віброзахисту (м механічної частини) В основу винаходу покладена задача удосконалення електронної частини схеми відомого датчика шляхом використання методу фазової модуляції сигналу, що дозволяє частково або цілком усунути перераховані недоліки Поставлена задача в датчику кутових переміщень, що містить механічну частину, що складається з маятника, підвішеного на щонайменше одній балці, двох котушок індуктивності, що входять до складу датчиків відхилення маятника від середнього положення, і двигуна ЛІНІЙНОГО типу, що має котушку індуктивності, розташовану на маятнику, і два магніти з зустрічне орієнтованими Основними недоліками відомого датчика є - використання амплітудного методу виділення сигналу, - неможливість здійснення електронної юстировки (компенсації зрушення механічної частини 1 00 (О о ю 50687 фази коливань при розладі коливального контуру стосовно резонансної частоти Коливальний контур утворений котушкою 5 індуктивного датчика і ЗОВНІШНІХ конденсаторів Сі чи C-z У даному випадку схема включає 2 контури 11 по числу індуктивних датчиків Зміна резонансної частоти двох описаних вище контурів, а отже і фази коливань, відбувається при відключенні маятника 3 від середнього положення Це еквівалентно переміщенню діамагнітного сердечника в полях котушок 5 індуктивних датчиків і змінюючи їх індуктивність таким чином, що в одному з датчиків створюється позитивне, а в другому негативне зрушення по фазі Це дозволяє створити з двох індуктивних датчиків 11 і резисторів Ri і R2 мостову схему й одержати на и діагоналі (А-В) диференціальний сигнал, що виділяється схемою суматора 10 (диференціального підсилюТакі удосконалення електронної частини датвача) і має подвійну величину фазового зрушення чика кутових переміщень дозволили і велику ЛІНІЙНІСТЬ характеристики Міст живиться - здійснювати обробку сигналу на перемінному перемінним струмом, що надходить від генератострумі, що практично цілком виключило вплив ЗОра, що перестроюється, 9 ВНІШНІХ дестабілізуючих факторів (зміна температури, вологості, напруги живлення і т п ) на помилЗ виходу суматора 10 сигнал надходить на ки, пов'язані зі зміною постійної складової підсилювач-обмежувач 12 для придушення параелектронних елементів, зитної амплітудної модуляції сигналу і далі на фазовий детектор 13, що виділяє сигнал постійного - виконувати електричне компенсування мехаструму пропорційний відхиленню маятника 3 у нічних відхилень, що виникають у процесі зборки зазорі датчиків 5 зі знаком ВІДПОВІДНИМ напрямку датчика, шляхом зміни частоти генератора, що відхилення Цей сигнал подається на котушку 7 дозволяє змінювати фазове співвідношення в рекерування ЛІНІЙНИМ двигуном 6, що повертає маязультуючому сигналі ВІДПОВІДНО фазі генератора, тник 3 приблизно в центр зазору між датчиками 11 - забезпечити за допомогою фазової модуляції Величина відхилення маятника 3 від центра вибільшу стабільність сигналу, зменшивши тим сазначається величиною сигналу датчиків 11, необмим шуми корисного сигналу, хідною для зрівноважування ЛІНІЙНИМ двигуном 6, - значно підвищити чутливість датчика і пракщо виникає в маятнику, моменту Чим менше відтично при дуже малому посиленні в ланцюзі звохилення маятника від центру, тим менше ступінь ротнього зв'язку одержати велику амплітуду вихідвигину підвісу маятника і тем менше вплив гистеного сигналу резиса матеріалу підвісу На приведеному кресленні представлена схеполями, що розташовані з боків котушки і закріплені нерухомо, і електронну, що включає в себе дві згадані котушки індуктивності датчиків відхилення, які заживлені від генератора, суматор і схему виділення і масштабування вихідного сигналу датчика, ВІДПОВІДНО ДО винаходу вирішена шляхом введення в електронну частину додатково двох резисторів і двох конденсаторів, за допомогою яких утворений міст перемінного струму, що включає згадані котушки індуктивності датчиків відхилення, плечі якого з'єднані із суматором, і послідовно включених із суматором підсилювачаобмежувача і фазового детектора, вихід останнього з яких з'єднаний з котушкою індуктивності двигуна, при цьому керуючий вхід фазового детектора з'єднаний з виходом генератора прямо або через фазозрушуючий ланцюг ма датчика кутових переміщень Датчик має механічну 1 і електронну 2 частини Механічна частина 1 складається з маятника З, підвішеного на двох балках 4, двох котушок 5 індуктивності, що входять до складу датчиків відхилення маятника 3 від середнього положення, двигун 6 ЛІНІЙНОГО типу, що має котушку 7 індуктивності, розташовану на маятнику 3, і два магніти 8 із зустрічне орієнтованими полями Електронна частина 2 складається з двох згаданих котушок 5 індуктивності, заживлених від генератора 9, суматора 10, входи якого підключені, ВІДПОВІДНО до коливальних контурів 11, що утворять разом з резисторами Ri і F 2 міст пере? мінного струму, а вихід через підсилювачобмежувач 12 підключений до фазового детектора 13 Вихід фазового детектора 13 підключений до ЛІНІЙНОГО двигуна 6, послідовно з яким включена схема 14 виділення і масштабування, на вході якої включений RC-фільтр 15, який служить для перетворення токового сигналу в потенційний, його згладжування і подачі на масштабуючий підсилювач 16 В основу роботи схеми покладене явище зміни Фазовий метод дозволяє приблизно на порядок збільшити чутливість схеми керування двигуном 6 і тим самим зменшує кут відхилення маятника 3 до декількох кутових хвилин, що дозволяє використовувати більш твердий ПІДВІС маятника і, отже, збільшити МІЦНІСТЬ датчика Сигнал керування фазовим детектором надходить від генератора 9 Настроювання фазового детектора 13 виконується зміною фази керуючого сигналу, яка може виконуватися або перебудовою в деяких межах частоти самого генератора 9 або за допомогою спеціального фазозсуваючого ланцюга Перший варіант є більш кращим, тому що зменшується число вузлів, здатних викликати нестабільність електронної частини схеми Вихідним сигналом схеми є струм що протікає через котушку 7 керування ЛІНІЙНОГО двигуна 6 і пропорційний діючому на маятник моменту, тобто пропорційний синусу кута нахилу маятника 3 (датчика) стосовно горизонту Для одержання потенційного сигналу необхідної величини служить схема 14 виділення і масштабування вихідного сигналу датчика яка містить фільтр 15 нижніх частот з резистора R3 і конденсатора Сз і масштабуючий підсилювач 16 50687 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
Назва патенту англійськоюAngular displacement transducer with electronic circuit for measuring tilt angles
Автори англійськоюPavlenko Yurii Fedorovych
Назва патенту російськоюДатчик угловых перемещений, содержащий электронную схему для определения углов наклона
Автори російськоюПавленко Юрий Федорович
МПК / Мітки
МПК: G01P 15/13
Мітки: датчик, кута, визначення, нахилу, переміщень, кутових, схемою, електронною
Код посилання
<a href="https://ua.patents.su/3-50687-datchik-kutovikh-peremishhen-z-elektronnoyu-skhemoyu-viznachennya-kuta-nakhilu.html" target="_blank" rel="follow" title="База патентів України">Датчик кутових переміщень з електронною схемою визначення кута нахилу</a>
Спосіб визначення відносної зміни висоти і кута нахилу об’єкта
Номер патенту: 32304
Опубліковано: 15.12.2000
Автори: Лютак Зіновій Петрович, Катрич Микола Васильович, Лютак Ігор Зіновійович, Контіала Мікі
Мітки: висоті, зміни, визначення, кута, відносної, нахилу, спосіб, об'єкта
Текст:
...Це призводить до неоднозначності результатів контролю, а отже і низької точності визначення зміни висоти об'єкта контролю. Запропонований спосіб направлений на вирішення задачі визначення величини відносної зміни висоти об'єкта чи земної поверхні з високою точністю, отримання інформації про кут нахилу поверхні об'єкта контролю, визначення динамічних змін об'єкта контролю. Згідно даного способу ємнісні перетворювачі, які знаходяться в...
Двокоординатний датчик кутів нахилу

Номер патенту: 35954
Опубліковано: 16.04.2001
Автори: Мрачковський Олег Дмитрович, Худяков Борис Сергійович
МПК: G01C 9/00
Мітки: нахилу, кутів, двокоординатний, датчик
Формула / Реферат:
1. Двокоординатний датчик кутів нахилу, що містить рухомий електрод, жорстко зв'язаний з контрольованим об'єктом, нерухомий електрод у вигляді грушоподібного маятника і вимірювальну схему, підключену до рухомого електрода, який відрізняється тим, що рухомий електрод виконаний у вигляді порожньої півсфери, в центрі якої підвішено грушоподібний маятник, а сама півсфера поділена на чотири рівних електрично ізольованих один від одного сферичних...
Мікрохвильовий датчик переміщень
Номер патенту: 25479
Опубліковано: 30.10.1998
Автори: Проць Роман Володимирович, Голинський Василь Дмитрович, Сторож Володимир Георгійович
МПК: H02J 3/26
Мітки: переміщень, датчик, мікрохвильовий
Формула / Реферат:
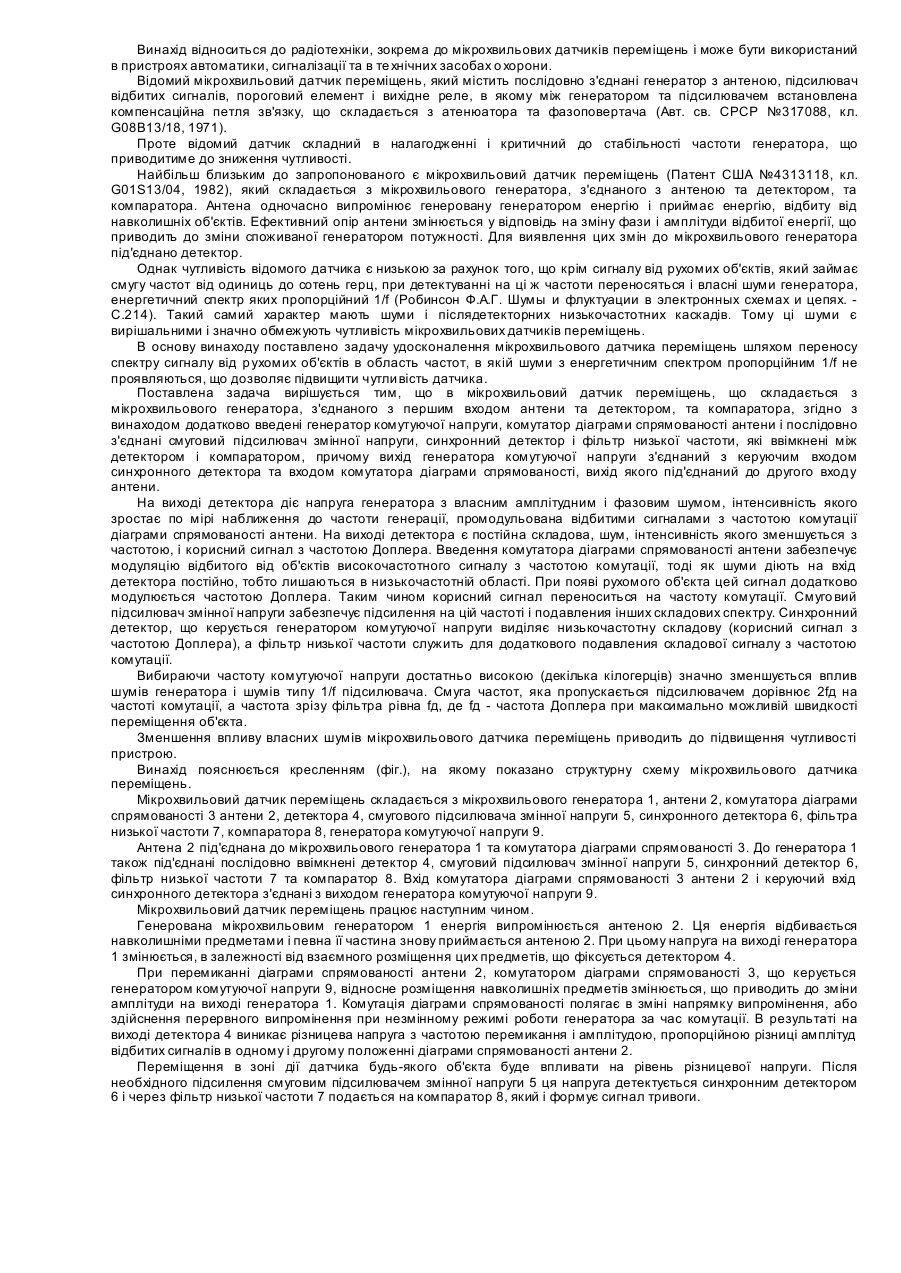
Мікрохвильовий датчик переміщень, що складається з мікрохвильового генератора, з'єднаного з першим входом антени та детектором, та компаратора, який відрізняється тим, що в нього додатково введені генератор комутуючої напруги, комутатор діаграми спрямованості антени і послідовно з'єднані смуговий підсилювач змінної напруги, синхронний детектор і фільтр низької частоти, які ввімкнені між детектором і компаратором, причому вихід генератора...
Спосіб прогнозування скакової здібності коней та пристрій для визначення кута нахилу фаланги тазової кінцівки коня
Номер патенту: 29591
Опубліковано: 15.11.2000
Автор: Кузнецов Євген Іванович
МПК: A01K 29/00
Мітки: прогнозування, пристрій, фаланги, спосіб, кінцівки, коней, визначення, коня, нахилу, кута, скакової, здібності, тазової
Формула / Реферат:
1. Способ прогнозирования скаковой способности лошадей, включающий оценку развития конечностей, отличающийся тем, что у жеребят в шести-семи месячном возрасте измеряют угол наклона фаланги тазовой конечности, при этом жеребята, имеющие угол наклона тазовой конечности равным 44-46°, проявляют во взрослом возрасте высокую скаковую способность, а жеребята, имеющие больший или меньший угол - низкую скаковую способность.2. Приспособление...
Датчик механічних переміщень
Номер патенту: 5723
Опубліковано: 29.12.1994
Автори: Богатиренко Євгеній Федорович, Погиба Віктор Павлович, Лисенко Валентин Сергійович
МПК: G01B 7/00
Мітки: переміщень, датчик, механічних
Формула / Реферат:
Датчик механических перемещений, содержащий первичный преобразователь, выполненный в виде Ш-образного сердечника с размещенными на нем обмоткой возбуждения идвумя измерительными обмотками, тактовый генератор, соединенный с обмоткой возбуждения первичного преобразователя, подвижный элемент, установленный с возможностью перемещения относительно обмоток первичного преобразователя и интегратор, отличающийся тем, что он снабжен (n-1) первичными...
Попередній патент: Пристрій для укладання пляшок в тару
Наступний патент: Ринопневмометр
Випадковий патент: Спосіб та пристрій для надавання декількох рівнів обслуговування для бездротового зв'язку