Електромагнітний спосіб визначення напрямку дії головних механічних напружень в поверхневому шарі феромагнітних матеріалів
Номер патенту: 7731
Опубліковано: 15.07.2005
Автори: Чаплигін Валерій Іванович, Болотов Юрій Костянтинович

Формула / Реферат
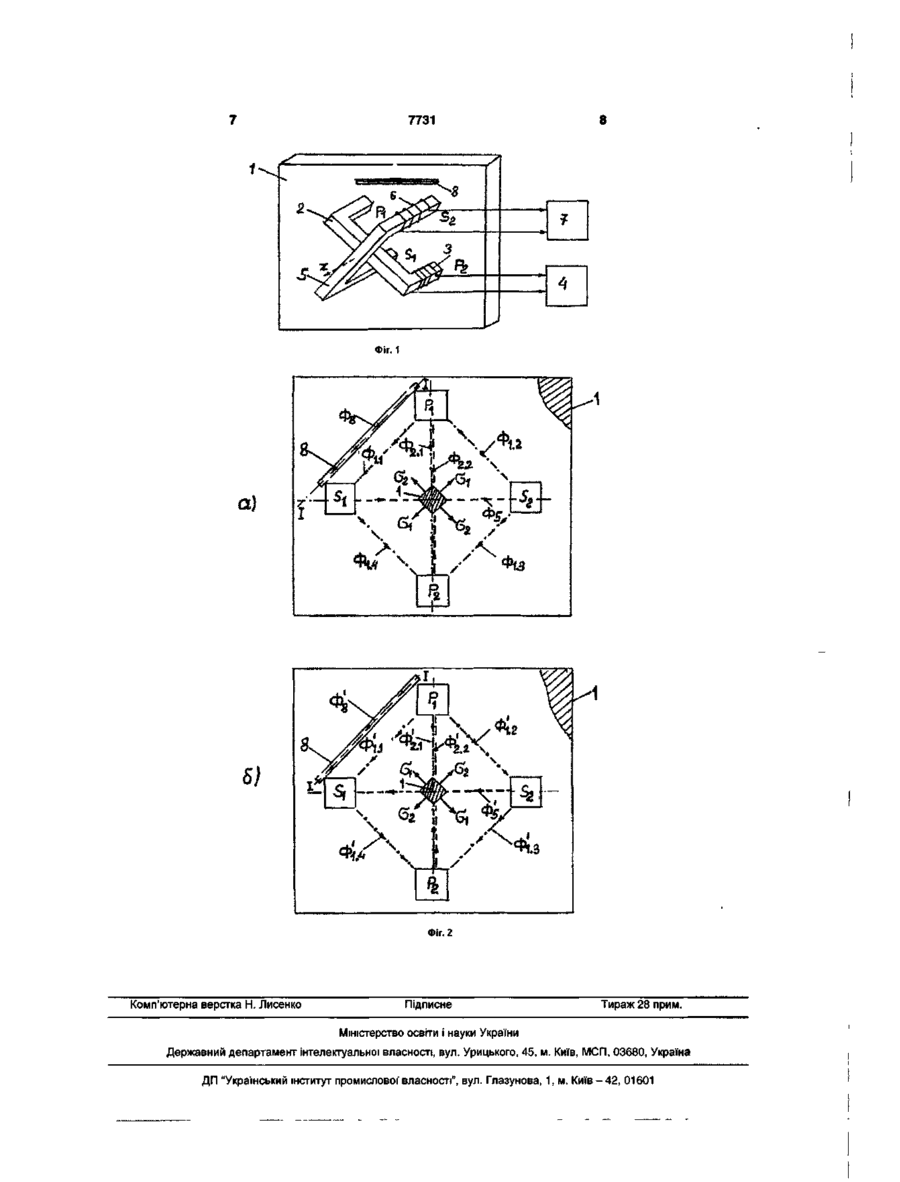
Електромагнітний спосіб визначення напрямку дії головних механічних напружень в поверхневому шарі феромагнітних матеріалів, який полягає в тому, що вводять у взаємодію з ділянкою матеріалу, яка контролюється, електромагнітний датчик, що містить скріплені один над одним під кутом 90° два Π-подібних магнітопроводи, збуджуючий магнітопровід з обмоткою збудження, підключеною до джерела змінного струму, і вимірювальний магнітопровід з вимірювальною обмоткою, підключеною до пристрою вимірювання вихідного сигналу, повертають датчик полюсами по поверхні матеріалу навколо його вертикальної осі симетрії, вимірюють при повороті максимальну величину Umax, вихідного сигналу, фіксують положення датчика, який відрізняється тим, що замикають поряд розташовані полюс збуджуючого і полюс вимірювального магнітопроводу феромагнітним шунтом з поперечним перерізом в формі квадрата, сторона якого а ≤ б, де б - глибина проникнення електромагнітного поля в матеріал шунта, вимірюють повторно величину максимального сигналу Umax2, якщо Umax2>Umax1, то напрям максимального головного механічного напруження співпадає з напрямом подовжньої осі шунта, а напрям мінімальної головної механічної напруги буде перпендикулярний до подовжньої осі шунта, якщо Umax2<Umax1, то напрям, перпендикулярний до подовжньої осі шунта, визначає напрям дії головної максимальної механічної напруги, а напрям мінімальної головної напруги співпадає з напрямом подовжньої осі шунта.
Текст
Електромагнітний спосіб визначення напрямку дії головних механічних напружень в поверхневому шарі феромагнітних матеріалів, який полягає в тому, що вводять у взаємодію з ділянкою матеріалу, яка контролюється, електромагнітний датчик, що містить скріплені один над одним під кутом 90° два П-подібних магнітопроводи, збуджуючий магнітопровід з обмоткою збудження, підключеною до джерела змінного струму, і вимірювальний магнітопровід з вимірювальною обмоткою, підключеною до пристрою вимірювання вихідного сигналу, повертають датчик полюсами по поверхні матеріалу Корисна модель відноситься до області вимірювальної техніки, і може бути використаний для неруинівного електромагнітного контролю напряму дії головних механічних напруг в поверхневому шарі матеріалів метало конструкцій. Відомий електромагнітний спосіб визначення напряму дії механічних напруг, який полягає в тому, що вводять у взаємодію з ділянкою матеріалу електромагнітний датчик, який містить П-образний магнітопровід, що складається із трьох П-образних частин з розташованою на них обмоткою збудження, підключене» до джерела змінного струму і вимірювальною, розташованою на середній Побразній частині і виходом підключеної до пристрою вимірювання, повергають датчик полюсами по поверхні матеріалу навкруги Його вертикальної осі симетрії, фіксують з вимірювальної обмотки максимальне значення вихідного сигналу і його розташування на матеріалі, визначають напрям дії головної максимальної механічної напруги, яка співпадає з напрямом лінії, яка проходить через центри полюсів датчика, визначають напрям голо навколо його вертикальної осі симетрії, вимірюють При ПОВОРОТІ Максимальну ВеЛИЧИНу Umax, ВИХІДНОГО сигналу, фіксують положення датчика, який відрізняється тим, що замикають поряд розташовані полюс збуджуючого і полюс вимірювального магнітопроводу феромагнітним шунтом з поперечним перерізом в формі квадрата, сторона якого аUmax1, TO НЭПрЯМ МЭКСИМЭЛЬНОГО ГОЛОВНОГО механічного напруження співпадає з напрямом подовжньої осі шунта, а напрям мінімальної головної механічної напруги буде перпендикулярний до подовжньої осі шунта, якщо Umax2ФБ які проходять ВІДПОВІДНО по збуджуючому 2 і по вимірювальному 5 магніто-проводу Із фіг 2а і фіг 26 виходить, що для двох варіантів плоского напруженого стану схема розподілу магнітного потоку Фг однакова, а тому одній величині максимального сигналу Umaxi буде відповідати одночасно два варіанта напрямів головних напруг Gi, G2 тобто визначити напрям напруг Gi, G2 не удається Цей результат і можливо здобути із аналізу РОЗПОДІЛУ МаГНІТНИХ ПОТОКІВ Ф2 2>Ф'2 2 (ФіГ 2 а , б ) ,при відсутності феромагнітного шунта 8 із аналізу виходить, Ф5=Фі1"Фі2 Ф'б = Ф'і 2—Фі 1 (2) (3) Магнітні потоки Фі2>Ф'і 1> які проходять в напрямку дії головних мінімальних механічних напруг G2 значно меньше магнітних потоків ,які проходять в напрямку головних максимальних напруг «Тому для максимальних вихідних сигналів Umaxi, U'maxi (4) ~ U max1 никність матеріалу і магнітна проникність при ди механічної напруги G, ^ - коефіцієнт магнітострикції контрольованого матеріалу, 71 - константа Так як в області слабких електромагнітних полів Я = const [Белов К Магнітострикційні явища та їх технічний додаток -М Наука Гол, ред фіз мат літ, 1987 -160с, с52], то із формули (1) виходить, що величина зміни магнітної проникності Дц , буде визначатися тільки зміною механічної напруги G Відомо, ЩО напрям ди максимальної головної напруги Gi є і напрямом легкого намагнічування контрольованого матеріалу [Белов К Магнітострикційні явища та їх практичні застосування Додаток - М Наука Гол ред фіз мат, літ,, 1987 -160с, с ЗО], тому максимальний сигнал з вимірювальної обмотки б електромагнітного датчика (Фіг 10 буде зафіксований пристроєм вимірювання 7, в тому випадку, коли одна пара полюсів наприклад, Pi, Si або Рг, Эг буде розташована в напрямку ди максимальної механічної напруги Gi (Фіг 2а, б) Розглянемо розподіл магнітного потоку в СПІЛЬНІЙ магнітній низці датчик контрольований матеріал 1 для двох випадків плоского напруженого стану з різним напрямком дії головної максимальної Gi і головної мінімальної G2 напруги в контрольованому матеріалі І (Фіг 2а, б) коли пара полюсів Pi, Si датчика співпадає з напрямком напруги Gi Магнітний потік фг і , створений обмоткою збудження 3 розподіляється на декілька магнітних потоків потоки Фі і ~Фі 4> Ф2 1, які проходять в контрольованому матеріалі І і магнітні потоки 6 вимірювальної обмотки 6 з врахуванням формул Ф'5 \N e (5) де W6 - число витків вимірювальної обмотки 6 Із формул (4) і (5) видно , що сигнали U ma xi, U'maxi ДЛЯ ОбОХ ВИПЭДК1В рОЗПОДІЛу ГОЛОВНИХ НЭПруГ G-і, G2 одинакові, тому по величині максимального сигналу Umaxi ви значити напрям ди головних напруг G-і, G2 неможливо Визначити напрям дії головних напруг Gi, G2 можливо шляхом замикання одної пари полюсів датчика, наприклад, Pi, Si або Рг, S2 феромагнітним шунтом 8, який зменшує магнітний опір паралельно з'єднаних опорів ділянки матеріалу під парою полюсів Pi, Si і магнітного шунта 8 Згідно схемам розподілу магнітних потоків 4л,фаа приведеним на фіг 2 а, б можемо записати для магнітних потоків Фг2>Ф'2 2 , які проходять через вимірювальну обмотку 6 Фб =Фв +Фі 1 ~Фі 2 (6) де ф 1 2 « Ф і і 1-Ф'в ДЄ ф'-, - « ф'-, , (7) 2 ВІДПОВІДНО З формулами (6) і (7J значення ма ксимальних ВеЛИЧИН ВИХІДНИХ СИГНаЛІВ U m a x 2, U'max2 будуть рівні И
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determining the direction of main stresses in the surface layer of ferromagnetic material by using an electromagnetic detector
Автори англійськоюChaplyhin Valerii Ivanovych
Назва патенту російськоюСпособ определения направления действия основных механических напряжений в поверхностном слое ферромагнитного материала с помощью электромагнитного датчика
Автори російськоюЧаплыгин Валерий Иванович
МПК / Мітки
МПК: G01N 27/00, G01L 1/12
Мітки: головних, визначення, шарі, матеріалів, феромагнітних, електромагнітний, напружень, механічних, спосіб, дії, поверхневому, напрямку
Код посилання
<a href="https://ua.patents.su/4-7731-elektromagnitnijj-sposib-viznachennya-napryamku-di-golovnikh-mekhanichnikh-napruzhen-v-poverkhnevomu-shari-feromagnitnikh-materialiv.html" target="_blank" rel="follow" title="База патентів України">Електромагнітний спосіб визначення напрямку дії головних механічних напружень в поверхневому шарі феромагнітних матеріалів</a>
Спосіб визначення напружень в поверхневому шарі металевого виробу і пристрій для його реалізації
Номер патенту: 30516
Опубліковано: 15.11.2000
Автори: Палаш Володимир Миколайович, Дзюбик Андрій Романович, Юськів Василь Миколайович
МПК: G01L 1/20, H01L 35/32, H01L 35/28
Мітки: металевого, напружень, поверхневому, виробу, реалізації, спосіб, шарі, пристрій, визначення
Формула / Реферат:
1. Спосіб визначення напружень в поверхневому шарі металевого виробу, згідно якого вимірюють значення контактної термоелектрорушійної сили, в залежності від величини якої визначають напруження, відрізняється тим, що в еталонному зразку вільному від напружень, з того ж матеріалу, що і металевий виріб, визначають термоелектрорушійну силу, яка виникає при контакті нагрітого термозонду з поверхнею зразка, створюють напружений стан і змінюючи...
Спосіб визначення напружень в поверхневому шарі металевого виробу і пристрій для його реалізації
Номер патенту: 68991
Опубліковано: 16.08.2004
Автори: Палаш Роман Володимирович, Кузьо Ігор Володимирович, Дзюбик Андрій Романович
МПК: H01L 35/28, G01L 1/20, H01L 35/32
Мітки: металевого, шарі, виробу, поверхневому, визначення, напружень, спосіб, пристрій, реалізації
Формула / Реферат:
1. Спосіб визначення напружень в поверхневому шарі металевого виробу, згідно з яким у вільному від напружень еталонному зразку з того ж матеріалу, що і металевий виріб, визначають термоелектрорушійну силу (ТЕРС), яка виникає при контакті нагрітого термозонда з поверхнею зразка, створюють напружений стан, і ступенево змінюючи його, кожен раз вимірюють значення ТЕРС, за якими будують градуйовану залежність величини ТЕРС від величини напружень в...
Спосіб визначення механічних напруг у виробах з феромагнітних матеріалів та пристрій для його реалізації
Номер патенту: 17181
Опубліковано: 18.03.1997
Автори: Мінаков Сергій Миколайович, Фомічов Сергій Костянтинович, Степаненко Олександр Іванович, Кульков Анатолій Миколайович, Зарицький Сергій Петрович, Недосєка Анатолій Якович, Яременко Михайло Андрійович, Ланчаков Григорій Олександрович
МПК: G01L 1/12
Мітки: визначення, спосіб, реалізації, виробах, матеріалів, феромагнітних, пристрій, напруг, механічних
Формула / Реферат:
1. Способ определения механических напряжений в изделиях из ферромагнитных материалов, заключающийся в определении измеряемой величины сигнала путем фазочувствительного измерения сигнала, поданного на намагничивающий электромагнит преобразователя, установленного на контролируемое изделие, и снятого с измерительного электромагнита преобразователя преобразованного сигнала, и определении по значению измеряемой величины сигнала механических...
Спосіб визначення механічних напружень статичного характеру в рейці
Номер патенту: 6123
Опубліковано: 15.04.2005
Автори: Арбузов Максим Анатолійович, Рибкін Віктор Васильович
МПК: G01N 27/00, G01L 1/12
Мітки: статичного, механічних, характеру, рейці, напружень, спосіб, визначення
Формула / Реферат:
Спосіб визначення механічних напружень статичного характеру в рейці, при якому зразок рейки закріплюють в захоплювачі навантажувального пристрою, встановлюють на зразок магнітопружний датчик з ортогонально розміщеними намагнічувальним та вимірювальним магнітопроводами та обмотками на них, повертають магнітопружний датчик навколо осі, що перпендикулярна площині полюсів магнітопроводів, на кут α, вимірюють вихідний сигнал на вимірювальній...
Пристрій визначення величини зміни контактної локальної термоелектрорушійної сили в поверхневому шарі металевого виробу
Номер патенту: 31476
Опубліковано: 15.12.2000
Автори: Юськів Василь Миколайович, Дзюбик Андрій Романович, Палаш Володимир Миколайович
МПК: H01L 35/00
Мітки: величини, контактної, шарі, локальної, зміни, сили, поверхневому, визначення, термоелектрорушійної, пристрій, виробу, металевого
Текст:
...силою в місці контакту першого термозонду з поверхнею досліджуваного зиробу, і контактною локальною термоелектрорушійною силою в місці контакту другого термозонду з поверхнею еталонного зразка. Така різниця компенсує вплив навколишнього середояища, а о*ґже, зміну основних властивостей досліджуваного виробу, як наслідок, підвищується точність вимірювань контактної локальної термоелектрорушійної сили. Амперметр забезпечує...
Попередній патент: Тепличне покриття
Наступний патент: Упаковка для супутніх харчових продуктів
Випадковий патент: Асоціація мікроорганізмів medusomyces gisevii v для одержання безалкогольних напоїв бродіння