Система корекції нестаціонарного динамічного об’єкта
Формула / Реферат
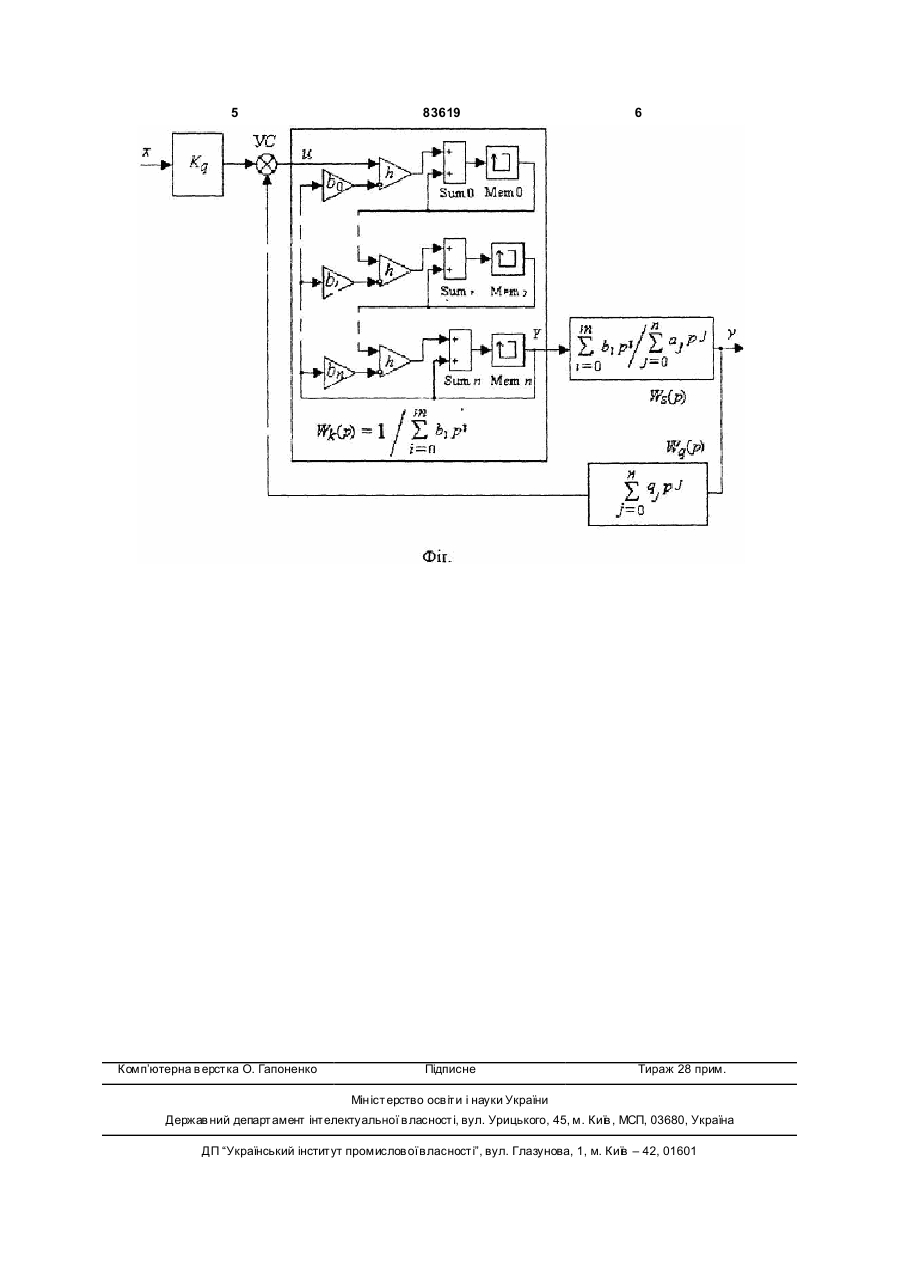
Система корекції нестаціонарного динамічного об'єкта, яка складається з блока масштабування, з'єднаного з входом блока порівняння, вихід якого з'єднаний з входом блока послідовної корекції, вихід якого з'єднаний з об'єктом, і блока зворотного зв'язку, що з'єднує вихід об'єкта і вхід блока порівняння, яка відрізняється тим, що блок послідовної корекції виконаний з можливістю реалізації рекурентної процедури і складається з декількох послідовних ланок, кожна з яких складається з помножувача на коефіцієнт, що дорівнює кроку дискретизації, диференційного підсилювача, суматора та елемента пам'яті, де перший вхід суматора підключений до виходу елемента пам'яті проміжного сигналу з приростом, а значення приросту сигналу надходить на другий вхід суматора з диференційного підсилювача, перший вхід якого з'єднаний з виходом елемента пам'яті попереднього проміжного сигналу, а на другий вхід якого надходить сигнал з помножувача, виконаний з можливістю множення поточного сигналу, який надходить з виходу елемента пам'яті проміжного сигналу, на коефіцієнт, рівний кроку дискретизації, вихід блока послідовної корекції є виходом елемента пам'яті останньої ланки, а вхід блока послідовної корекції є першим входом диференційного підсилювача першої ланки.
Текст
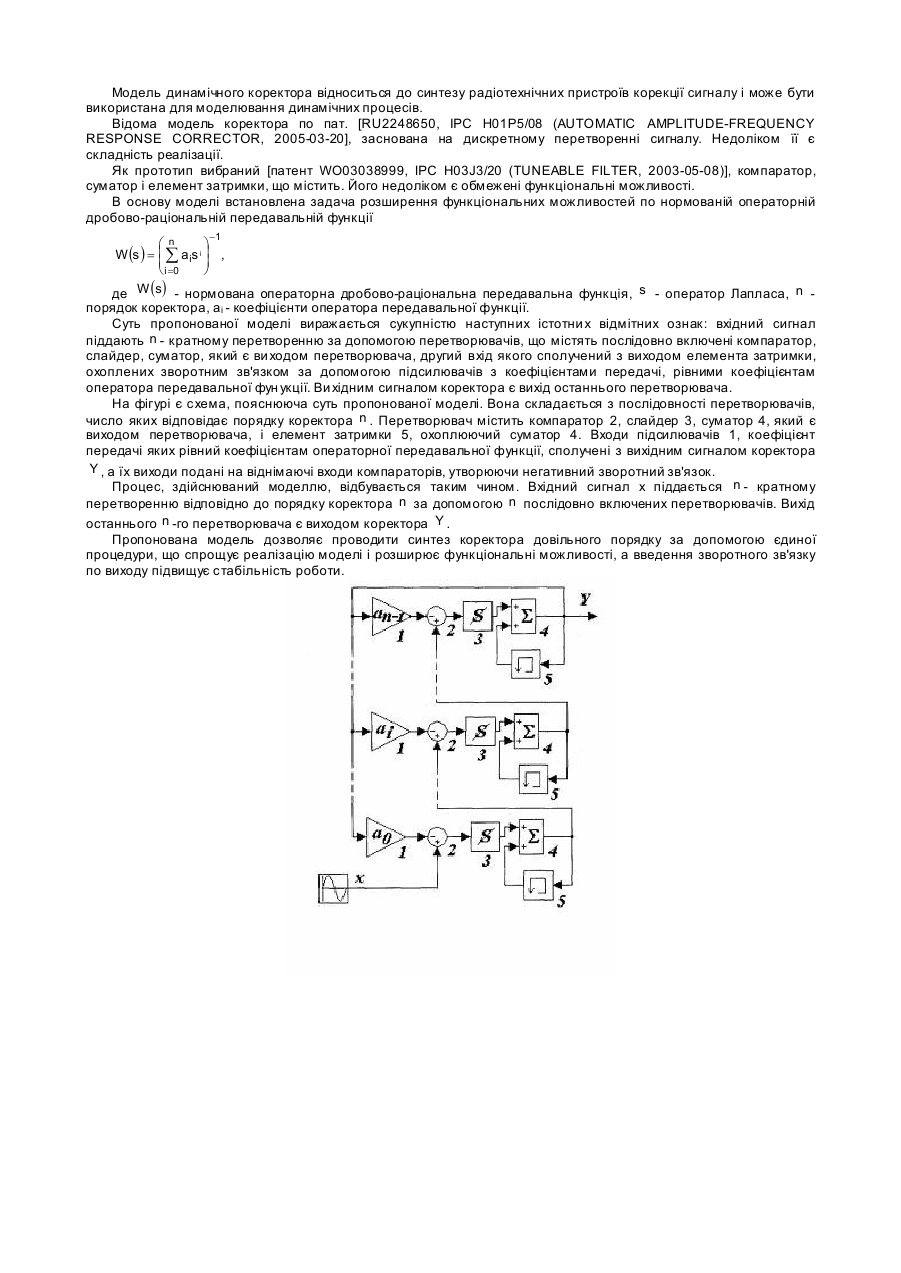
Система корекції нестаціонарного динамічного об'єкта, яка складається з блока масштабування, з'єднаного з входом блока порівняння, вихід якого з'єднаний з входом блока послідовної корекції, вихід якого з'єднаний з об'єктом, і блока зворотного зв'язку, що з'єднує ви хід об'єкта і вхід блока порівняння, яка відрізняється тим, що блок послідовної корекції виконаний з можливістю реалі 3 Wq (p) = 83619 n å qipi (2) i=0 що забезпечує аперіодичний перехідний процес і стійкість при умові j q j = (a0 + q0 )Cnt j - a j m å bjp j (3) j= 0 знаменником якої є чисельник передавальної функції об'єкту. Рівень вихідного сигналу у після введення корекції визначається вибором коефіцієнта передачі Kq =Kz·(a0+q0), де Kz - знаходиться з умови у=x·Kz , х - вхідний сигнал. Швидкодія системи корекції забезпечується вибором постійної часу t. При вказаному виборі і введенні елементів корекції бажана передавальна функція системи має вигляд Wz (p) = Kq n j å Cn t jpj j= 0 . Точність реалізації бажаної передавальної функції залежить від величини дрейфу параметрів об'єкту. При дрейфі j-го коефіцієнта похибка складе e j ³ Da j ((a 0 j + q 0 )C nt j ), де Daj - величина дрейфу коефіцієнта aj (j=0...n) передавальної функції об'єкту. Необхідна точність реалізації бажаної передавальної функції забезпечується вибором коефіцієнта q0 відповідно до умови q0 ³ max Da j ; j=1…n, Cj де n - біноміальний коефіцієнт, t - постійна часу. Ланка послідовної корекції має передавальну функцію Wk (p) = 1 4 (e C t ) . j j j n Опис реакції ланки послідовної корекції з операторною передавальною функцією (3) можна представити рекурентнім виразом Yk=Yk-1+(un-1,k-1-bk- 1 Yk)h, де Yk - ви хідний сигнал ланки, uj,k - проміжний сигнал, h- крок дискретизації, k - номер кроку. Реалізація (Фiг.) ланки послідовної корекції Wk(p) є рекурентною процедурою, що проводить підсумовування (Sum j, j=0.n) попереднього значення, що фіксується елементом пам'яті (Mem j, j=0.n) проміжного сигналу, з його приростом. Приріст проміжного сигналу обчислюється за допомогою диференціального підсилювача з коефіцієнтом, рівним кроку дискретизації, на вхід якого подана різниця попереднього значення проміжного сигналу і поточного значення сигналу ланки послідовної корекції, помноженої на коефіцієнт передавальної функції. Пропонована система корекції дозволяє забезпечити необхідну швидкодію при заданій якості процесу для динамічних нелінійних і нестаціонарних об'єктів з довільним відношенням порядку чисельника і знаменника передавальної функції. Бібліографічний список 1. Методы классической и современной теории автоматического управления: Учебник в 3-х т. Т.3: Методы современной теории автоматического управления / Под ред. Н.Д. Егунова. - M.: Изд-во МГТУ им. Н.Э. Бумана, 2000. - 748с. 5 Комп’ютерна в ерстка О. Гапоненко 83619 6 Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem of correction of non-stationary dynamical object
Автори англійськоюDolhin Volodymyr Prohorovych
Назва патенту російськоюСистема коррекции нестационарного динамического объекта
Автори російськоюДолгин Владимир Прохорович
МПК / Мітки
МПК: G05B 11/01
Мітки: нестаціонарного, система, корекції, динамічного, об'єкта
Код посилання
<a href="https://ua.patents.su/3-83619-sistema-korekci-nestacionarnogo-dinamichnogo-obehkta.html" target="_blank" rel="follow" title="База патентів України">Система корекції нестаціонарного динамічного об’єкта</a>
Система динамічної корекції нестаціонарного об’єкта
Номер патенту: 79959
Опубліковано: 10.08.2007
Автор: Долгін Володимир Прохорович
МПК: G05B 11/01, G05B 13/02
Мітки: об'єкта, нестаціонарного, корекції, система, динамічної
Формула / Реферат:
Система динамічної корекції нестаціонарного об'єкта, яка складається з блока масштабування, блока порівняння, блока послідовної корекції, об’єкта керування і зворотного зв'язку, що охоплює блок послідовної корекції і об'єкт керування, яка відрізняється тим, що зворотний зв'язок складається з суматора з підключеними до його входів масштабуючими підсилювачами, входи яких сполучені з виходами диференційних підсилювачів з коефіцієнтом підсилення,...
Спосіб корекції нестаціонарної динамічної системи
Номер патенту: 13004
Опубліковано: 15.03.2006
Автори: Долгін Володимир Прохорович, Долгін Ігор Володимирович
МПК: G05B 11/01
Мітки: динамічної, системі, корекції, нестаціонарної, спосіб
Формула / Реферат:
Спосіб корекції нестаціонарної динамічної системи, заснований на введенні ланок масштабування, корекції і зворотного зв'язку, який відрізняється тим, що вводять ланку послідовної корекції і задають її передавальну функцію, рівну зворотному значенню чисельника передавальної функції коректованої системи, яку охоплюють разом з коректованою системою ланкою зворотного зв'язку, що є форсуючою ланкою, порядок якої вибирають рівним порядку знаменника...
Модель динамічного коректора
Номер патенту: 23290
Опубліковано: 25.05.2007
Автори: Долгін Ігор Володимирович, Долгін Володимир Прохорович
МПК: H03J 3/00
Мітки: динамічного, коректора, модель
Формула / Реферат:
Модель динамічного коректора з нормованою операторною дробово-раціональною передавальною функцієюде W(s) - нормована операторна дробово-раціональна передавальна функція, s - оператор Лапласа, n - порядок коректора, ai - коефіцієнти оператора передавальної функції, яка містить компаратор, суматор і елемент затримки, яка відрізняється тим, що вхідний сигнал...
Пристрій динамічної корекції

Номер патенту: 23336
Опубліковано: 25.05.2007
Автори: Долгін Ігор Володимирович, Долгін Володимир Прохорович
МПК: H03J 3/00
Мітки: пристрій, корекції, динамічної
Формула / Реферат:
Пристрій динамічної корекції з нормованою операторною дробово-раціональною передавальною функцією,де W(s) - нормована операторна дробово-раціональна передавальна функція, s - оператор Лапласа, n - порядок коректора, - коефіцієнти оператора передавальної...
Пристрій дискретної корекції

Номер патенту: 12458
Опубліковано: 15.02.2006
Автори: Долгін Ігор Володимирович, Долгін Володимир Прохорович
МПК: G05B 21/00
Мітки: пристрій, корекції, дискретної
Формула / Реферат:
Пристрій дискретної корекції, який містить підсилювач 1, вхід якого є входом пристрою, і суматор 5, вихід якого є виходом пристрою, який відрізняється тим, що введені операційні підсилювачі 2 і 3, суматор 4 і елемент пам'яті 6, операційні підсилювачі 1, 2 і 3 мають коефіцієнти передачі b0, a0 і h/a1 відповідно, де h - крок дискретизації, причому підсилювач 1 виконує перемножування вхідного сигналу з коефіцієнтом чисельника b0, підсилювач 2...
Попередній патент: Пристрій для визначення запобіжних властивостей вибухових речовин у вибухонебезпечному середовищі
Наступний патент: Заміщені бензоксазоли та їх аналоги як естрогенні агенти
Випадковий патент: Передача мімо з перестановкою рівнів у системі безпровідного зв'язку