Спосіб корекції нестаціонарної динамічної системи
Номер патенту: 13004
Опубліковано: 15.03.2006
Автори: Долгін Володимир Прохорович, Долгін Ігор Володимирович
Формула / Реферат
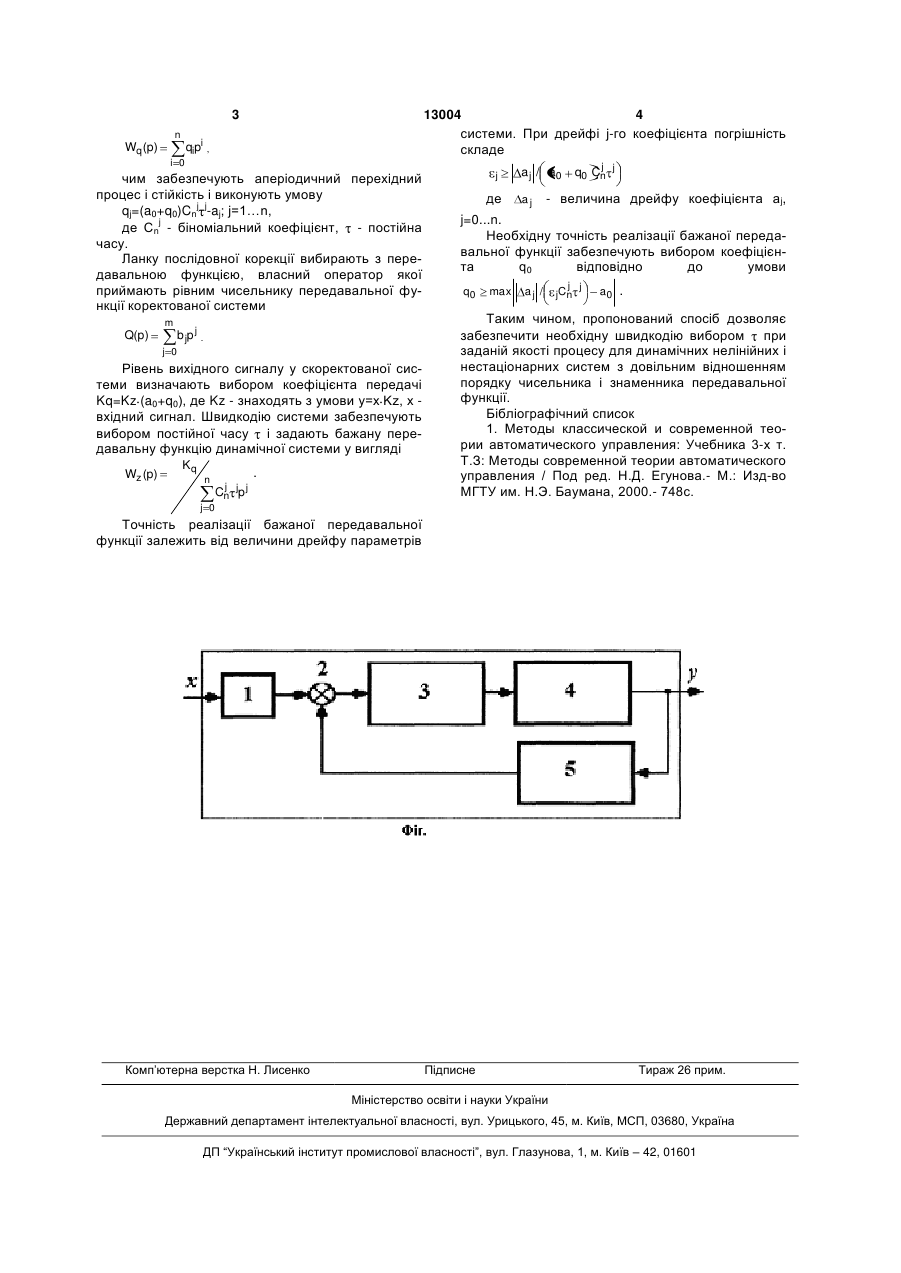
Спосіб корекції нестаціонарної динамічної системи, заснований на введенні ланок масштабування, корекції і зворотного зв'язку, який відрізняється тим, що вводять ланку послідовної корекції і задають її передавальну функцію, рівну зворотному значенню чисельника передавальної функції коректованої системи, яку охоплюють разом з коректованою системою ланкою зворотного зв'язку, що є форсуючою ланкою, порядок якої вибирають рівним порядку знаменника передавальної функції коректованої системи, причому значення її коефіцієнтів визначають на основі коефіцієнта передачі масштабувальної ланки і бажаних властивостей скоректованої системи.
Текст
Спосіб корекції нестаціонарної динамічної системи, заснований на введенні ланок масштабування, корекції і зворотного зв'язку, який відрізня 3 n 13004 4 системи. При дрейфі j-го коефіцієнта погрішність складе qipi , Wq (p) i 0 чим забезпечують аперіодичний перехідний процес і стійкість і виконують умову j j qj=(a0+q0)Cn -aj; j=1…n, j де Сn - біноміальний коефіцієнт, - постійна часу. Ланку послідовної корекції вибирають з передавальною функцією, власний оператор якої приймають рівним чисельнику передавальної функції коректованої системи m Q(p) b jp j . j 0 Рівень вихідного сигналу у скоректованої системи визначають вибором коефіцієнта передачі Kq=Kz (a0+q0), де Kz - знаходять з умови у=x Kz, х вхідний сигнал. Швидкодію системи забезпечують вибором постійної часу і задають бажану передавальну функцію динамічної системи у вигляді Wz (p) Kq n . j Cn jp j j 0 j де a j / a0 aj j q0 Cn j - величина дрейфу коефіцієнта аj, j=0...n. Необхідну точність реалізації бажаної передавальної функції забезпечують вибором коефіцієнта q0 відповідно до умови q0 max aj / j j jCn a0 . Таким чином, пропонований спосіб дозволяє забезпечити необхідну швидкодію вибором при заданій якості процесу для динамічних нелінійних і нестаціонарних систем з довільним відношенням порядку чисельника і знаменника передавальної функції. Бібліографічний список 1. Методы классической и современной теории автоматического управления: Учебника 3-х т. Т.З: Методы современной теории автоматического управления / Под ред. Н.Д. Егунова.- М.: Изд-во МГТУ им. Н.Э. Баумана, 2000.- 748с. Точність реалізації бажаної передавальної функції залежить від величини дрейфу параметрів Комп’ютерна верстка Н. Лисенко Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for correcting a non-stationary dynamic control system
Автори англійськоюDolhin Volodymyr Prohorovych, Dolhin Ihor Volodymyovych
Назва патенту російськоюСпособ коррекции нестационарной динамической системы управления
Автори російськоюДолгин Владимир Прохорович, Долгин Игорь Владимирович
МПК / Мітки
МПК: G05B 11/01
Мітки: спосіб, нестаціонарної, корекції, системі, динамічної
Код посилання
<a href="https://ua.patents.su/2-13004-sposib-korekci-nestacionarno-dinamichno-sistemi.html" target="_blank" rel="follow" title="База патентів України">Спосіб корекції нестаціонарної динамічної системи</a>
Пристрій для динамічної корекції рухів людини
Номер патенту: 66873
Опубліковано: 15.06.2004
Автори: Козявкін Володимир Ілліч, Волошин Богдан Дмитрович, Гордієвич Степан Михайлович, Котеляк Оксана Зенонівна
МПК: A61F 5/01, A63B 21/02
Мітки: людини, динамічної, пристрій, корекції, рухів
Формула / Реферат:
1. Пристрій для динамічної корекції руху людини у вигляді опорних елементів плечового пояса, таза, ліктів, стоп, колін, еластичних тяг, фіксуючих елементів, який відрізняється тим, що опорний елемент плечового пояса виготовлений у вигляді жилета, поверхні опорних елементів та еластичних пружних тяг виконані із матеріалу, липучого з однієї сторони, здатного до закріплення кожної еластичної пружної тяги в довільній точці опорних елементів ,...
Спосіб побудови моделі нелінійної динамічної системи
Номер патенту: 41143
Опубліковано: 15.08.2001
Автори: Горєлов Олександр Сергійович, Серков Олександр Анатолійович, Зєліков Всеволод Ілліч, Зубко Олег Олександрович, Нащанський Олександр Анатолійович, Гуртов Олександр Олександрович
МПК: G05B 23/02
Мітки: моделі, спосіб, нелінійної, системі, динамічної, побудови
Формула / Реферат:
Спосіб побудови моделі нелінійної динамічної системи, що включає до свого складу подачу тестуючих імпульсів, визначення реакції на тестуючий імпульс, який відрізняється тим, що додаткове тестування відбувається пакетом імпульсів, кількість яких у пакеті та часова відстань між ними змінюєтся під час тестування.
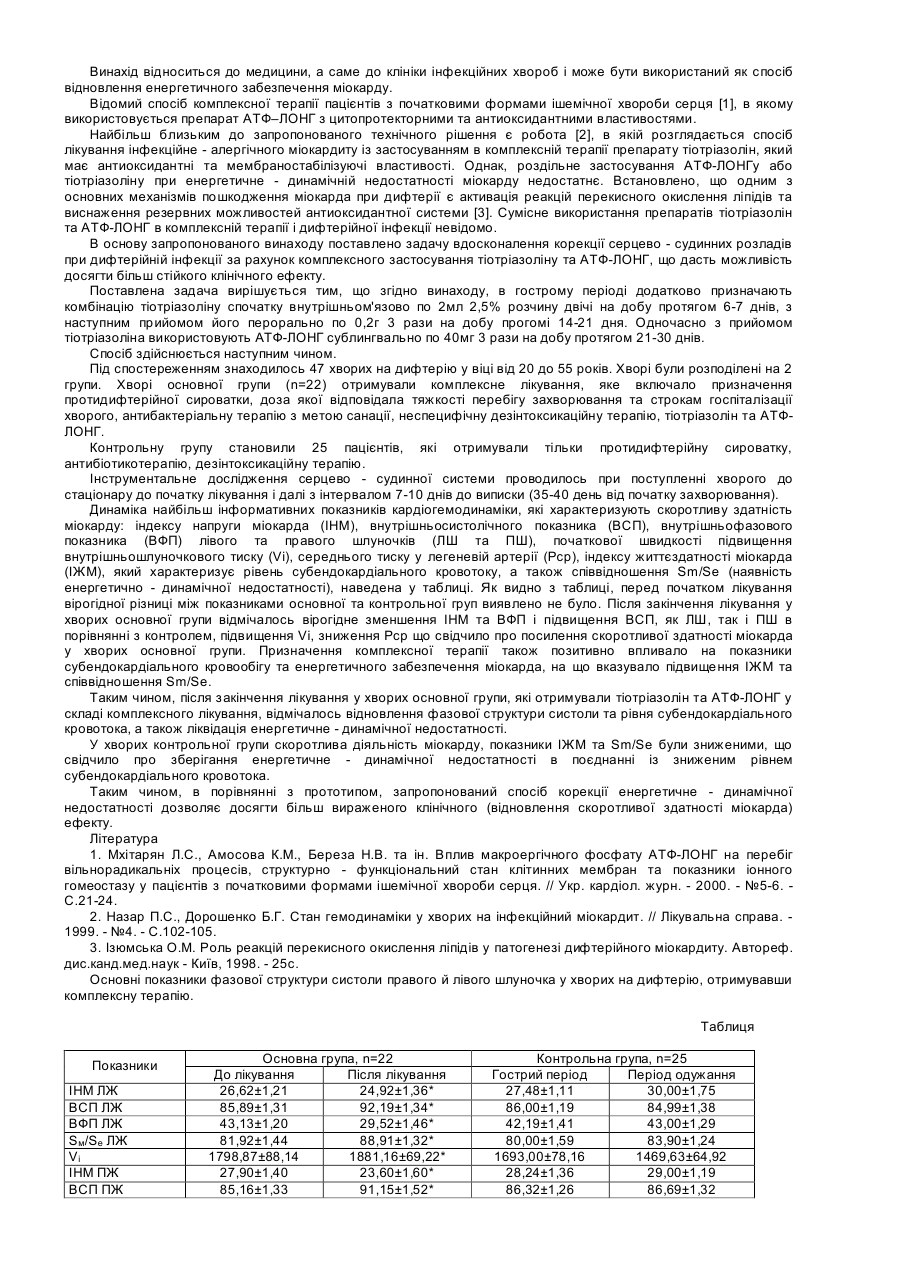
Спосіб корекції енергетично-динамічної недостатності міокарда при дифтерійній інфекції
Номер патенту: 64650
Опубліковано: 16.02.2004
Автор: Савчук Антоніна Іванівна
МПК: A61K 31/00
Мітки: спосіб, інфекції, міокарда, дифтерійний, корекції, недостатності, енергетично-динамічної
Формула / Реферат:
Спосіб корекції енергетично-динамічної недостатності міокарда при дифтерійній інфекції в гострому періоді шляхом комплексної комбінації протидифтерійної сироватки, антибіотика групи пеніциліну та дезінтоксикаційної терапії, який відрізняється тим, що додатково призначають комбінацію тіотриазоліну спочатку внутрішньом`язово по 2 мл 2,5% розчину двічі на добу протягом 6-7 днів, з наступним прийомом його перорально по 0,2 г 3 рази на добу...
Спосіб діагностично-прогностичної оцінки гормональної корекції статевої системи кобил при анафродизії
Номер патенту: 10243
Опубліковано: 15.11.2005
Автори: Подвалюк Дмитро Васильович, Харута Григорій Григорович
МПК: A61D 19/00
Мітки: кобил, статевої, анафродизії, системі, діагностично-прогностичної, оцінки, спосіб, корекції, гормональної
Формула / Реферат:
Спосіб діагностично-прогностичної оцінки гормональної корекції статевої системи кобил при анафродизії, який відрізняється тим, що визначення морфофункціональної активності статевих залоз та ефективності дії гормонального препарату проводиться за значенням інтегрального показника розмірів яєчників.
Спосіб корекції дисфункції імунної системи у хворих ендометріозом
Номер патенту: 31736
Опубліковано: 15.12.2000
Автори: Щербина Микола Олександрович, Грищенко Валентин Іванович, Попов Микола Миколаєвич, Потапова Лілія Вікторівна, Прокопюк Ольга Степанівна
МПК: A61B 17/42, A61P 15/00, A61K 35/55
Мітки: хворих, системі, спосіб, корекції, імунної, ендометріозом, дисфункції
Формула / Реферат:
Спосіб корекції дисфункції імунної системи у хворих на ендометріоз шляхом введення в організм клітин тканини вилочкової залози, який відрізняється тим, що здійснюють імплантацію кріоконсервованої тканини фетальної вилочкової залози у верхній зовнішній квадрант сідниці.
Попередній патент: Міст крана електричного однобалкового
Наступний патент: Електромагнітний трал
Випадковий патент: Пристрій для розточування отворів