G05B 11/01 — електричні
Пристрій ідентифікації діяльності оператора автоматизованої системи керування із під-регулятором
Номер патенту: 118161
Опубліковано: 25.07.2017
Автори: Олійник Ольга Юріївна, Тараненко Юрій Карлович, Різун Ніна Олегівна
МПК: G05B 11/01, G06F 7/00
Мітки: ідентифікації, діяльності, пристрій, під-регулятором, оператора, керування, системі, автоматизованої
Формула / Реферат:
Пристрій ідентифікації діяльності оператора автоматизованої системи керування із ПІД-регулятором зі змінними коефіцієнтами настроювання, який містить задавач завдання, елемент віднімання, пропорційну, інтегральну, диференціальну складові, суматор та ПІД-регулятор, обладнаний системою вибору одного із двох можливих коефіцієнтів пропорційної, інтегральної та диференціальної складових, який відрізняється тим, що вибір можливих коефіцієнтів...
Позиційна система керування з частотнорегульованим електроприводом
Номер патенту: 102319
Опубліковано: 26.10.2015
Автори: Мартиненко Олександр Віталійович, Калінов Андрій Петрович
МПК: G01R 27/08, G05B 11/01
Мітки: частотнорегульованим, керування, система, позиційна, електроприводом
Формула / Реферат:
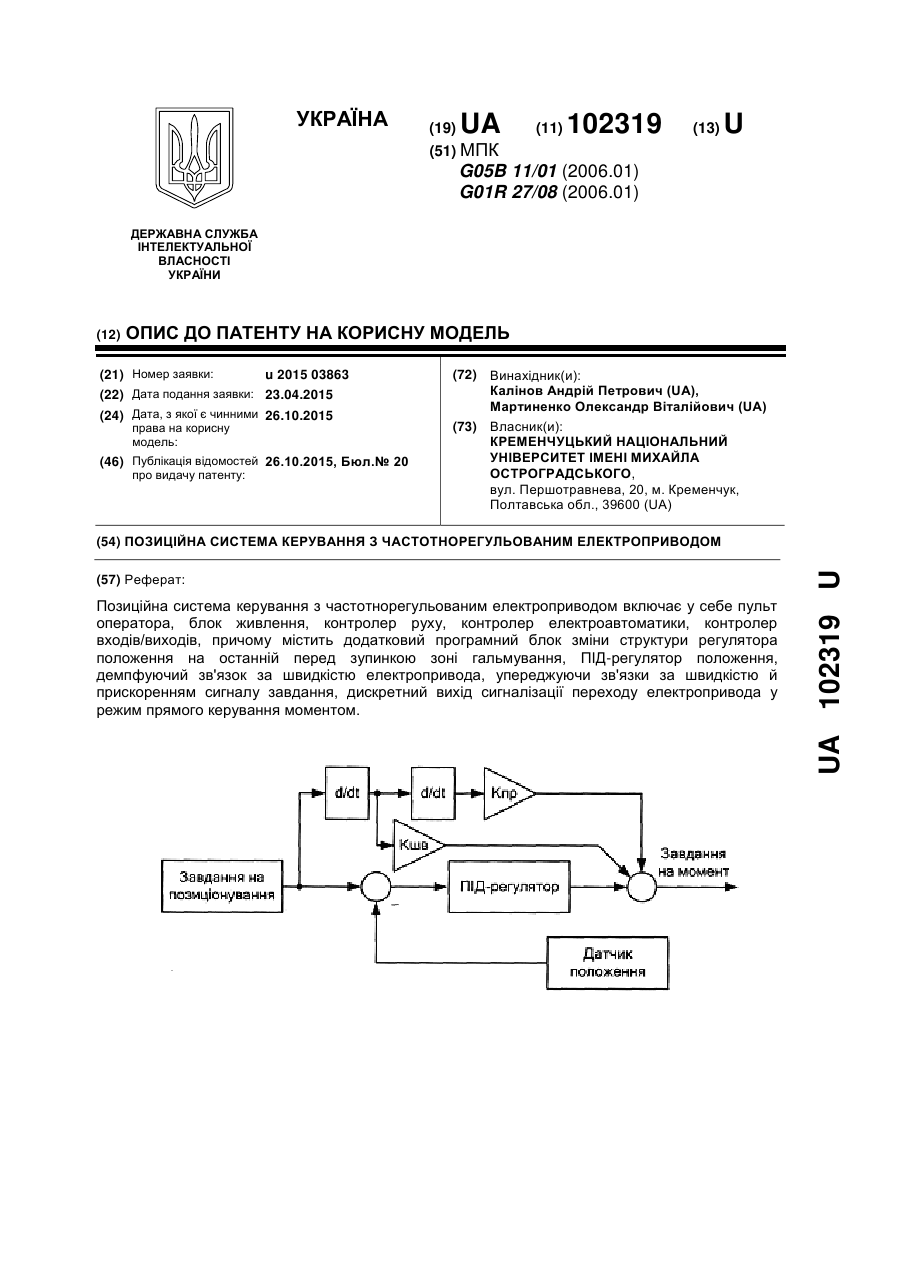
Позиційна система керування з частотнорегульованим електроприводом, яка включає у себе пульт оператора, блок живлення, контролер руху, контролер електроавтоматики, контролер входів/виходів, яка відрізняється тим, що містить додатковий програмний блок зміни структури регулятора положення на останній перед зупинкою зоні гальмування, ПІД-регулятор положення, демпфуючий зв'язок за швидкістю електропривода, упереджуючи зв'язки за швидкістю й...
Спосіб та цифрова система спостереження для визначення та компенсації впливів неврівноваженості навантаження на роботу систем спостереження та приводів
Номер патенту: 108845
Опубліковано: 25.06.2015
Автори: Лєднік Гєннадій Васільєвіч, Ботєновскій Сєргєй Лєонідовіч, Гончарук Ігорь Анатольєвіч, Шихов Алєксєй Алєксандровіч, Стріжнєв Алєксандр Гавріловіч, Кірячок Гєннадій Вітальєвіч, Віноградов Сєргєй Міхайловіч
МПК: G05B 11/01
Мітки: неврівноваженості, впливів, цифрова, спосіб, спостереження, навантаження, компенсації, систем, система, визначення, приводів, роботу
Формула / Реферат:
1. Спосіб визначення та компенсації впливів неврівноваженості навантаження на точність роботи систем спостереження чи приводів, згідно з яким для визначення зазначених впливів використовують систему, яку переводять у тестовий режим спостереження, на вхід подають лінійно-змінні з постійною малою швидкістю по всьому діапазону робочих кутів для двох напрямків руху навантаження перевірні керуючі сигнали, в процесі функціонування оцінюють вплив...
Цифрова система спостереження

Номер патенту: 108844
Опубліковано: 25.06.2015
Автори: Віноградов Сєргєй Міхайловіч, Шихов Алєксєй Алєксандровіч, Лєднік Гєннадій Васільєвіч, Стріжнєв Алєксандр Гавріловіч, Ботєновскій Сєргєй Лєонідовіч, Гончарук Ігорь Анатольєвіч
МПК: G05B 11/01
Мітки: цифрова, спостереження, система
Адаптивна система багатопараметричного регулювання
Номер патенту: 97184
Опубліковано: 10.03.2015
Автори: Наку Сергій Олегович, Кишенько Василь Дмитрович, Ладанюк Анатолій Петрович
МПК: G05B 11/01, G05B 13/02
Мітки: адаптивна, регулювання, багатопараметричного, система
Формула / Реферат:
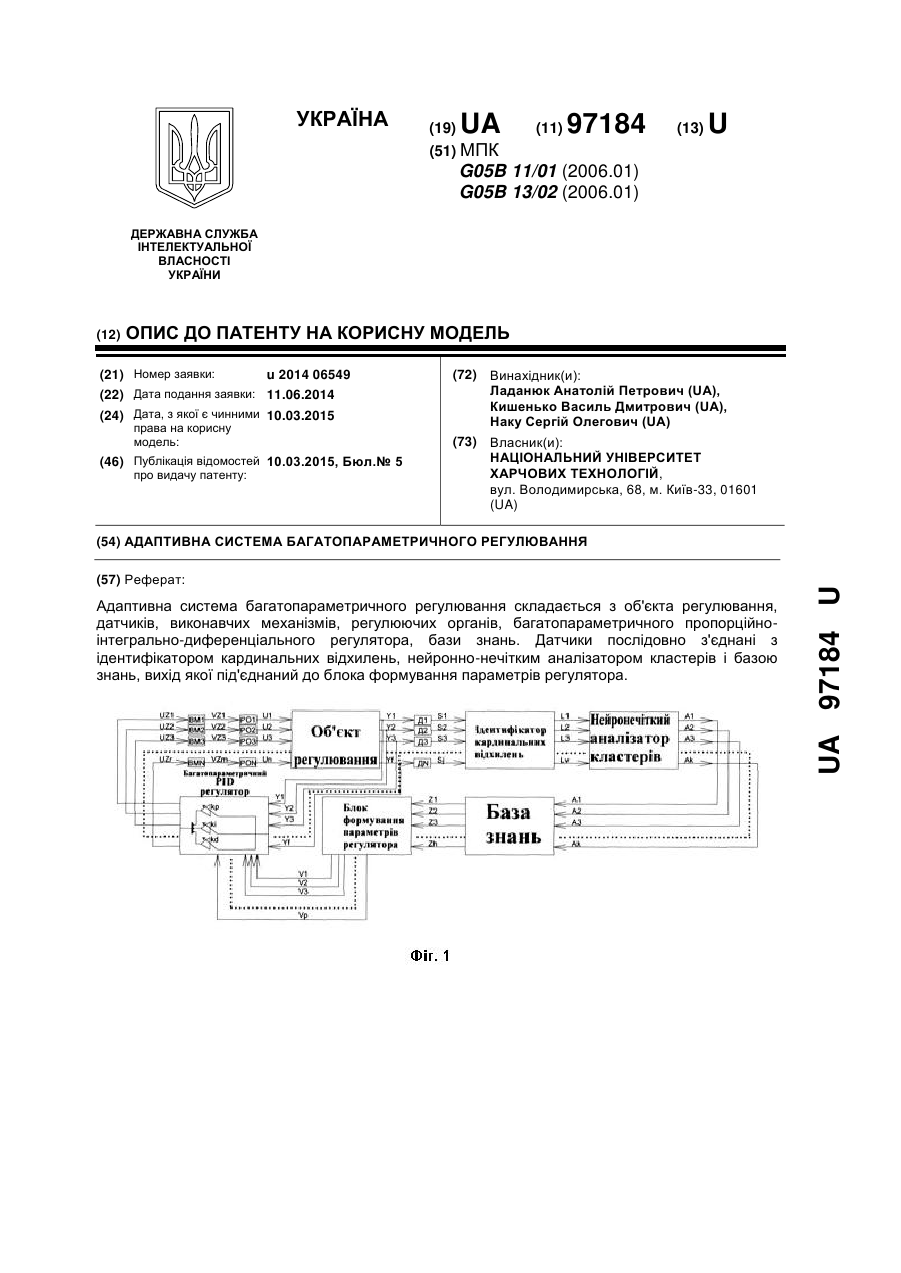
Адаптивна система багатопараметричного регулювання, що складається з об'єкта регулювання, датчиків, виконавчих механізмів, регулюючих органів, багатопараметричного пропорційно-інтегрально-диференціального регулятора, бази знань, яка відрізняється тим, що датчики послідовно з'єднані з ідентифікатором кардинальних відхилень, нейронно-нечітким аналізатором кластерів і базою знань, вихід якої під'єднаний до блока формування параметрів...
Спосіб автоматичного керування на основі зворотного зв’язку по відхиленню величини та фазового запізнення вихідного сигналу об’єкта керування
Номер патенту: 103548
Опубліковано: 25.10.2013
Автор: Агамалов Олег Миколайович
МПК: G05B 13/02, G05B 11/01
Мітки: величини, сигналу, автоматичного, відхиленню, запізнення, зв'язку, основі, фазового, спосіб, керування, об'єкта, зворотного, вихідного
Формула / Реферат:
Спосіб автоматичного керування (САУ) на основі зворотного зв'язку по відхиленню величини та фазового запізнення вихідного сигналу об'єкта керування, в якому зворотній зв'язок по відхиленню величини та фазового запізнення вихідного сигналу об'єкта керування використовують для формування сигналу керування об’єктом керування, в якому використовують різницю величин між заданим значенням r та вихідним значенням сигналу об'єкта керування у, який...
Спосіб регулювання параметра зовнішнього контуру з обмеженням параметра внутрішнього контуру при підпорядкованому регулюванні параметрів в системі автоматичного регулювання
Номер патенту: 103128
Опубліковано: 10.09.2013
Автор: Чепкунов Роман Анатолійович
МПК: G05B 13/02, G05B 11/32, G05B 11/01 ...
Мітки: автоматичного, регулюванні, системі, підпорядкованому, внутрішнього, обмеженням, контуру, спосіб, регулювання, зовнішнього, параметрів, параметра
Формула / Реферат:
Спосіб регулювання параметра зовнішнього контуру з обмеженням параметра внутрішнього контуру при підпорядкованому регулюванні параметрів у системі автоматичного регулювання, який полягає в тому, що значення сигналу регульованого параметра зовнішнього контуру віднімають від його заданого значення, одержану різницю подають на вхід регулятора зовнішнього контуру, із вихідного сигналу обмежувача сигналу задання внутрішнього контуру віднімають...
Спосіб регулювання параметра зовнішнього контуру з обмеженням параметра внутрішнього контуру при підпорядкованому регулюванні параметрів в системі автоматичного регулювання
Номер патенту: 76245
Опубліковано: 25.12.2012
Автор: Чепкунов Роман Анатолійович
МПК: G05B 11/01, H02P 5/00
Мітки: спосіб, зовнішнього, системі, внутрішнього, обмеженням, контуру, регулюванні, підпорядкованому, регулювання, параметра, параметрів, автоматичного
Формула / Реферат:
Спосіб регулювання параметра зовнішнього контуру з обмеженням параметра внутрішнього контуру при підпорядкованому регулюванні параметрів в системі автоматичного регулювання, який полягає в тому, що регульований параметр зовнішнього контуру віднімають із його заданого значення, одержану різницю подають на вхід регулятора зовнішнього контуру, із вихідного сигналу обмежувача сигналу задання внутрішнього контуру віднімають регульований параметр...
Астатична система керування з заданою динамічною похибкою та скороченою тривалістю перехідного процесу

Номер патенту: 74965
Опубліковано: 12.11.2012
Автори: Олійник Павло Борисович, Іванов Сергій Вікторович, Тєут Василь Михайлович
МПК: G05B 11/01, G05D 1/02
Мітки: керування, система, скороченою, динамічною, астатична, заданою, процесу, тривалістю, похибкою, перехідного
Формула / Реферат:
Астатична система автоматичного керування з заданою величиною динамічної похибки та скороченою тривалістю перехідного процесу, зі змінною структурою з перемиканням між двома регуляторами, що містить задавальний пристрій, блок порівняння, до прямого входу якого приєднано вихід задавального пристрою, об'єкт керування, датчик вихідного сигналу об'єкта керування, вхід якого приєднано до виходу об'єкта керування, а вихід - до інверсного входу...
Система автоматичного супроводу по напрямку повітряних об’єктів з диференціальним зв’язком
Номер патенту: 99368
Опубліковано: 10.08.2012
Автори: Градобоєва Неля Вікторівна, Зайцев Григорій Фролович, Булгач Віктор Леонардович, Кривуца Володимир Георгійович
МПК: G05B 11/01
Мітки: повітряних, автоматичного, диференціальним, зв'язком, напрямку, супроводу, об'єктів, система
Формула / Реферат:
Система автоматичного супроводу по напрямку азимуту/куту місця повітряних об'єктів з диференціальним зв'язком, що складається з послідовного з'єднання пеленгаційного пристрою, що містить на вході антену, а на виході фазовий детектор, послідовного коригувального пристрою, а також послідовно з'єднаних підсилювача постійного струму, електромашинного підсилювача, виконавчого двигуна, через редуктор з'єднаного з антеною пеленгаційного пристрою,...
Триквей

Номер патенту: 62999
Опубліковано: 26.09.2011
Автори: Тугаєнко Юрій Павлович, Попов Олексій Васильович, Бриль Володимир Вікторович, Самков Олександр Всеволодович, Козаченко Георгій Георгійович, Павлов Віктор Борисович, Павленко Володимир Євдокимович
МПК: G05B 11/01, B60K 1/00
Мітки: триквей
Формула / Реферат:
Триквей, що містить корпус, у якому розміщені електродвигуни, приєднані через редуктори, ремінні або ланцюгові передачі до двох ведучих коліс, прикріплених до передньої частини корпусу, система керування та акумуляторна батарея, а також кермову колонку, яка установлена на корпусі між ведучими колесами, який відрізняється тим, що додаткове колесо приєднане до задньої частини корпусу за допомогою нахиленого шарніра й поворотної скоби,...
Автономний робот
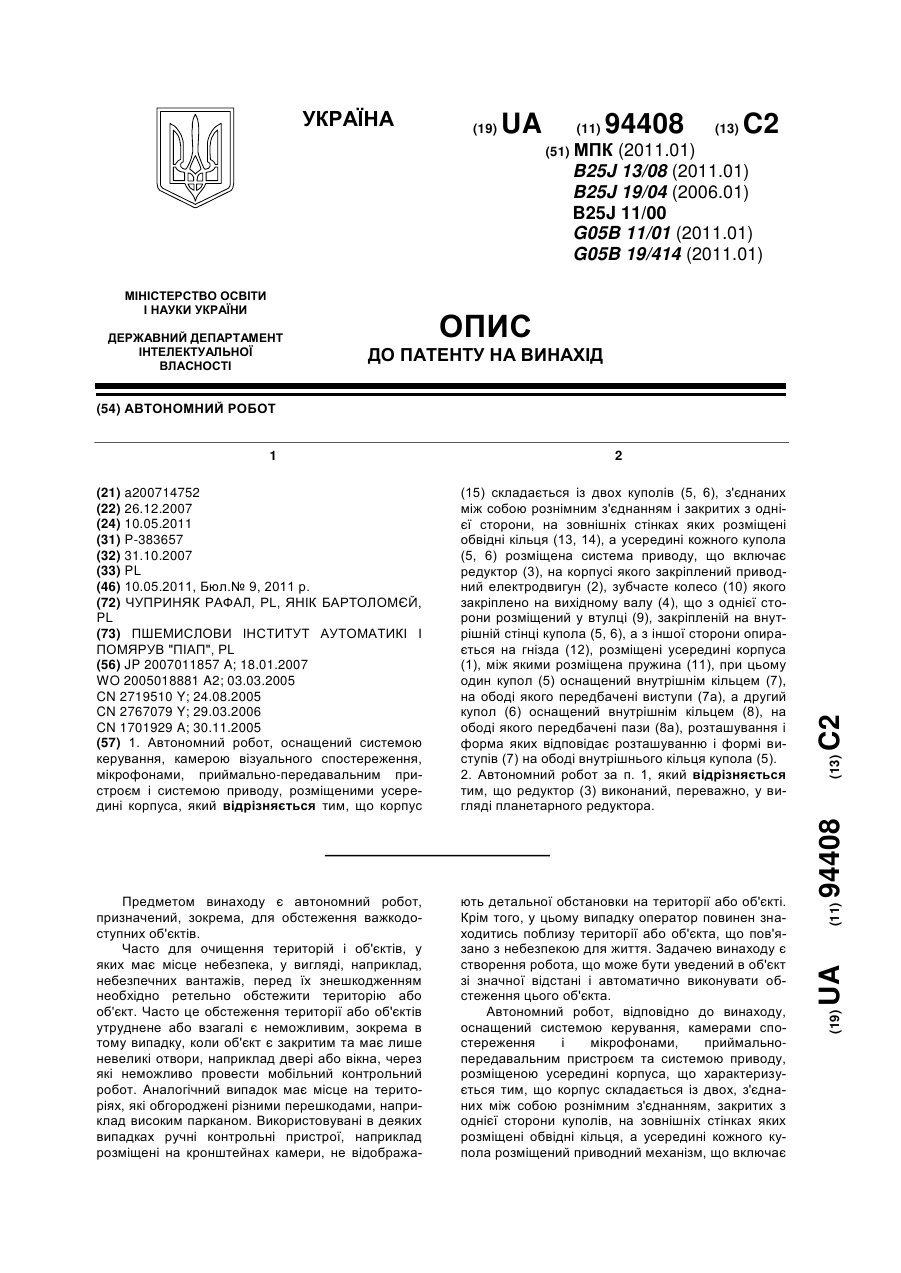
Номер патенту: 94408
Опубліковано: 10.05.2011
Автори: Чуприняк Рафал, Янік Бартоломєй
МПК: B25J 19/00, B25J 11/00, B25J 13/08 ...
Мітки: автономний, робот
Формула / Реферат:
1. Автономний робот, оснащений системою керування, камерою візуального спостереження, мікрофонами, приймально-передавальним пристроєм і системою приводу, розміщеними усередині корпуса, який відрізняється тим, що корпус (15) складається із двох куполів (5, 6), з'єднаних між собою рознімним з'єднанням і закритих з однієї сторони, на зовнішніх стінках яких розміщені обвідні кільця (13, 14), а усередині кожного купола (5, 6) розміщена система...
Система керування технологічним об’єктом з використанням багатопараметричного регулятора на основі нечіткої логіки
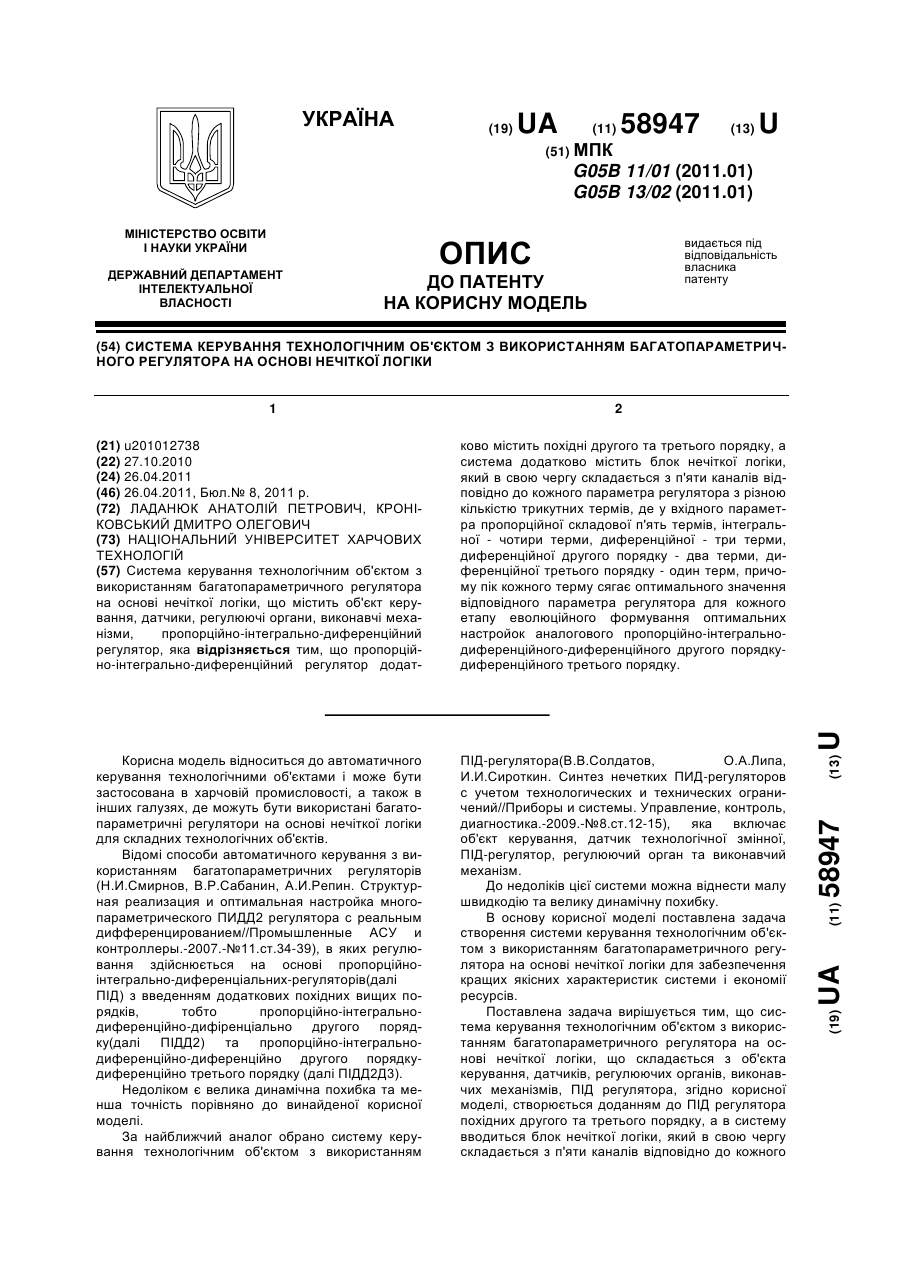
Номер патенту: 58947
Опубліковано: 26.04.2011
Автори: Ладанюк Анатолій Петрович, Кроніковський Дмитро Олегович
МПК: G05B 11/01, G05B 13/02
Мітки: об'єктом, основі, система, логіки, нечіткої, використанням, регулятора, керування, багатопараметричного, технологічним
Формула / Реферат:
Система керування технологічним об'єктом з використанням багатопараметричного регулятора на основі нечіткої логіки, що містить об'єкт керування, датчики, регулюючі органи, виконавчі механізми, пропорційно-інтегрально-диференційний регулятор, яка відрізняється тим, що пропорційно-інтегрально-диференційний регулятор додатково містить похідні другого та третього порядку, а система додатково містить блок нечіткої логіки, який в свою чергу...
Спосіб робастного керування багатовимірним динамічним об’єктом

Номер патенту: 57100
Опубліковано: 10.02.2011
Автори: Кондратенко Юрій Пантелійович, Кукліна Катерина Олексіївна, Тимченко Віктор Леонідович
МПК: G05B 11/01
Мітки: робастного, спосіб, динамічним, об'єктом, керування, багатовимірним
Формула / Реферат:
Спосіб робастного керування багатовимірним динамічним об'єктом, згідно з яким керування об'єктом за допомогою системи керування полягає у формуванні сигналу, відповідного вектору керування, на основі суми вихідних сигналів динамічного об'єкта керування та блока формування заданої траєкторії, які надсилають до блока формування обмеження векторної функції відхилень від заданої траєкторії, до якого також з блока оптимізації надсилають сигнал...
Спосіб керування багатовимірним динамічним об’єктом
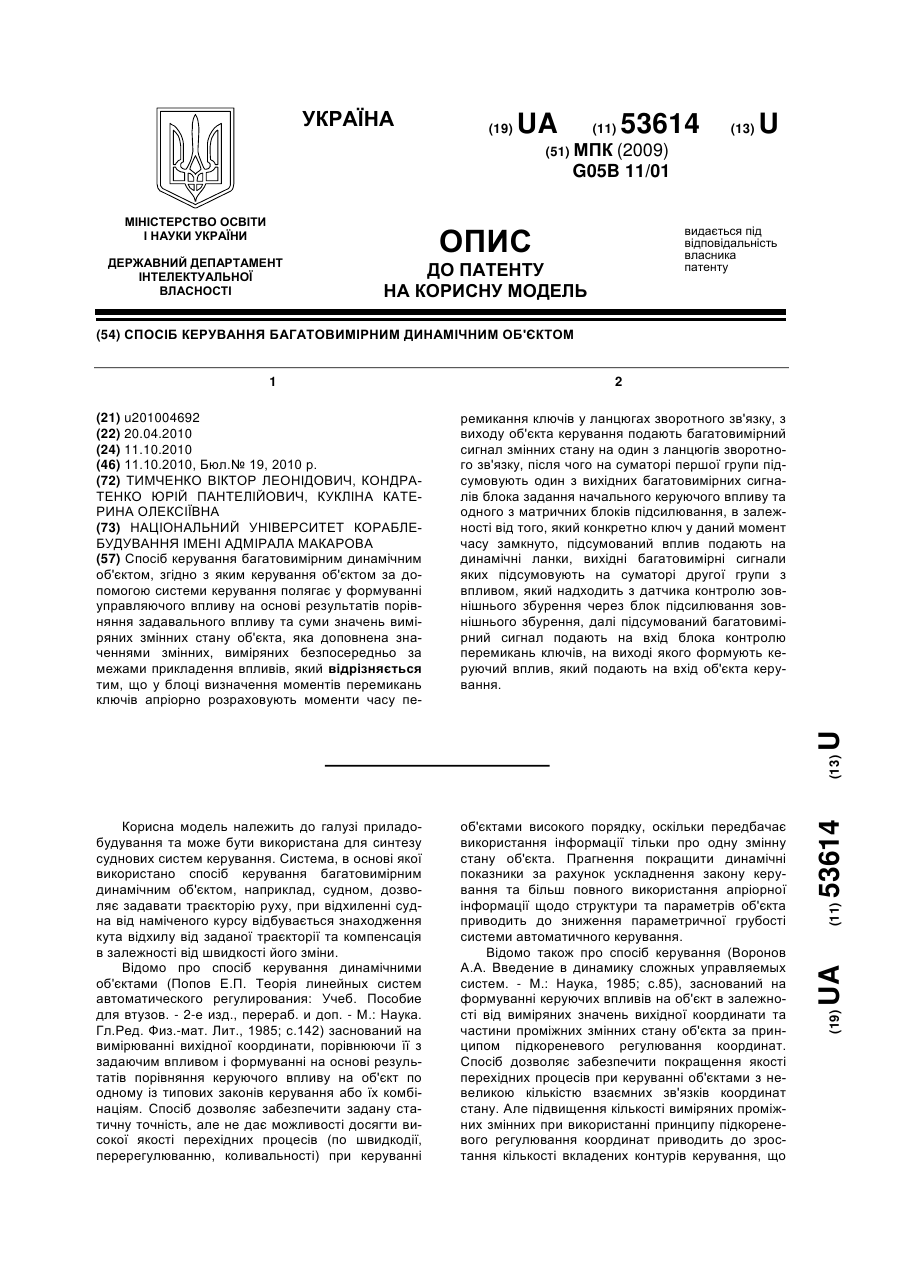
Номер патенту: 53614
Опубліковано: 11.10.2010
Автори: Кукліна Катерина Олексіївна, Тимченко Віктор Леонідович, Кондратенко Юрій Пантелійович
МПК: G05B 11/01
Мітки: об'єктом, динамічним, спосіб, багатовимірним, керування
Формула / Реферат:
Спосіб керування багатовимірним динамічним об'єктом, згідно з яким керування об'єктом за допомогою системи керування полягає у формуванні управляючого впливу на основі результатів порівняння задавального впливу та суми значень виміряних змінних стану об'єкта, яка доповнена значеннями змінних, виміряних безпосередньо за межами прикладення впливів, який відрізняється тим, що у блоці визначення моментів перемикань ключів апріорно розраховують...
Спосіб автоматичного регулювання об’єктом на основі обчислення векторної похибки автоматичного регулювання

Номер патенту: 91398
Опубліковано: 26.07.2010
Автор: Агамалов Олег Миколайович
МПК: G05B 13/02, G05B 11/01
Мітки: об'єктом, регулювання, похибки, основі, спосіб, обчислення, автоматичного, векторної
Формула / Реферат:
Спосіб автоматичного регулювання об'єктом регулювання на основі обчислення векторної похибки автоматичного регулювання, в якому вихідний сигнал об'єкта регулювання регулюють шляхом зміни сигналу на виході регулятора, який відрізняється тим, що вихідний сигнал об'єкта регулювання y визначають як вектор з врахуванням фазового (або часового) зсуву відносно сигналу на вході (або сигналу заданої уставки) об'єкта регулювання, визначають...
Електропривод

Номер патенту: 51680
Опубліковано: 26.07.2010
Автор: Муріков Дмитро Володимирович
МПК: G05B 11/01
Мітки: електропривод
Формула / Реферат:
1. Електропривод, що містить послідовно з'єднані: елемент порівняння, вхід якого є входом самого електропривода; регулятор швидкості; електродвигун; виконавчий механізм, пов'язаний з датчиком навантаження; регульований інтегрувальний блок; два регульованих порогових пристрої й два підсилювачі, вихід другого з них з'єднаний із піднімальним входом елемента порівняння, а вхід першого регульованого порогового пристрою - з виходом датчика...
Під-регулятор із змінними коефіцієнтами настроювання
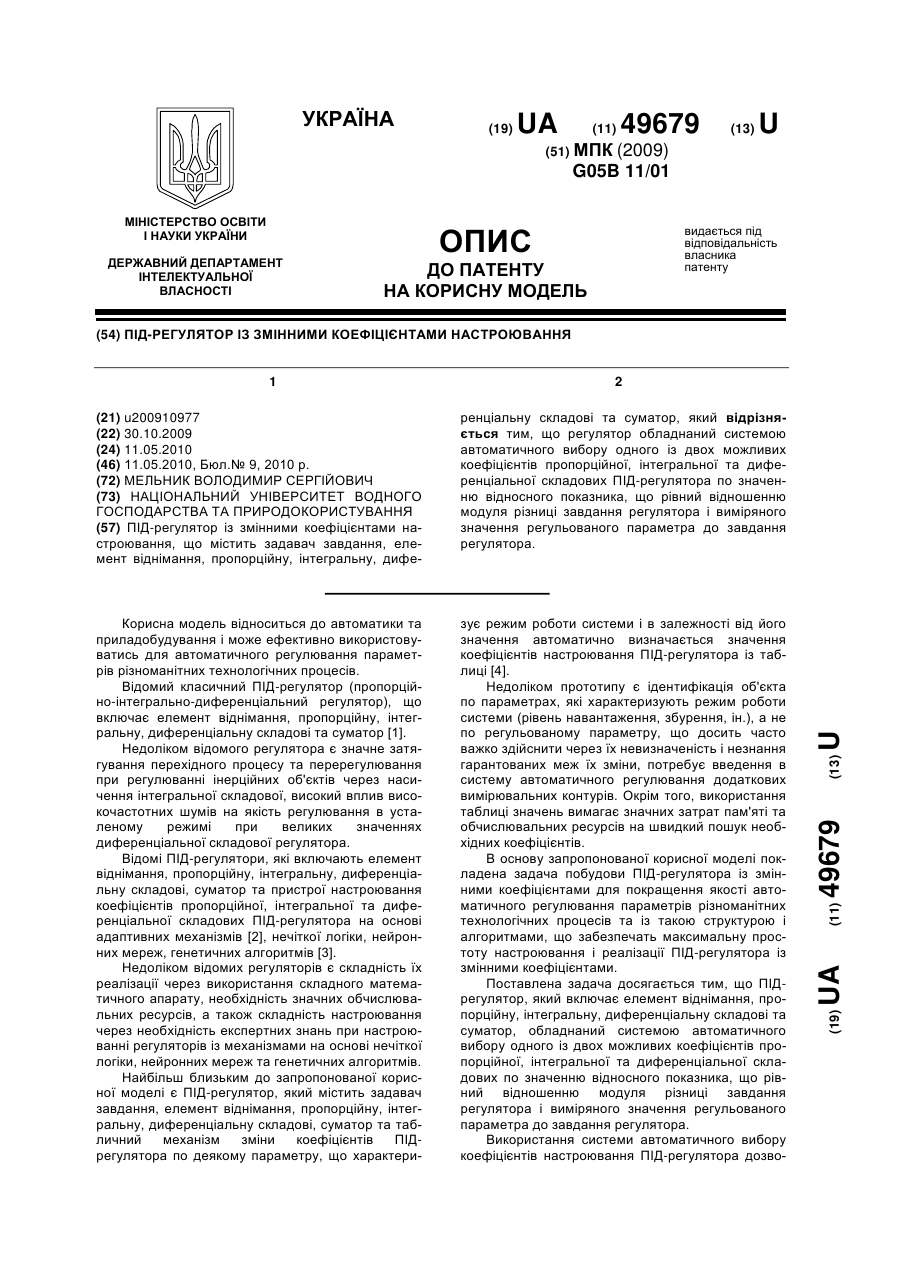
Номер патенту: 49679
Опубліковано: 11.05.2010
Автор: Мельник Володимир Сергійович
МПК: G05B 11/01
Мітки: настроювання, змінними, коефіцієнтами, під-регулятор
Формула / Реферат:
ПІД-регулятор із змінними коефіцієнтами настроювання, що містить задавач завдання, елемент віднімання, пропорційну, інтегральну, диференціальну складові та суматор, який відрізняється тим, що регулятор обладнаний системою автоматичного вибору одного із двох можливих коефіцієнтів пропорційної, інтегральної та диференціальної складових ПІД-регулятора по значенню відносного показника, що рівний відношенню модуля різниці завдання регулятора і...
Комбінована кореляційна диференційна система вирівнювання часових запізнювань сигналів
Номер патенту: 88528
Опубліковано: 26.10.2009
Автори: Булгач Віктор Леонардович, Градобоєва Неля Вікторівна, Зайцев Григорій Фролович, Кривуца Владимир Георгійович
МПК: G05B 11/01, G06F 11/00
Мітки: сигналів, запізнювань, диференційна, кореляційна, система, часових, комбінована, вирівнювання
Формула / Реферат:
Комбінована кореляційна диференціальна система вирівнювання часових запізнювань сигналів, що надходять від одного джерела по двох каналах, перший з яких містить блок постійної затримки, вихід якого з'єднаний через перший блок часової затримки на Dt з першим входом першого корелятора і безпосередньо - з першим входом другого корелятора, при цьому перший і другий корелятори складаються з послідовно з'єднаних перемножувача і згладжувального...
Система корекції нестаціонарного динамічного об’єкта
Номер патенту: 83619
Опубліковано: 11.08.2008
Автор: Долгін Володимир Прохорович
МПК: G05B 11/01
Мітки: система, об'єкта, нестаціонарного, динамічного, корекції
Формула / Реферат:
Система корекції нестаціонарного динамічного об'єкта, яка складається з блока масштабування, з'єднаного з входом блока порівняння, вихід якого з'єднаний з входом блока послідовної корекції, вихід якого з'єднаний з об'єктом, і блока зворотного зв'язку, що з'єднує вихід об'єкта і вхід блока порівняння, яка відрізняється тим, що блок послідовної корекції виконаний з можливістю реалізації рекурентної процедури і складається з декількох...
Спосіб оптимізації перехідного процесу в системі автоматичного регулювання та пристрій для його реалізації
Номер патенту: 81526
Опубліковано: 10.01.2008
Автори: Стеба Олександр Михайлович, Мотуз Георгій Іванович, Кралін Володимир Всеволодович, Корсун Валентин Петрович
МПК: G05B 11/01
Мітки: пристрій, реалізації, автоматичного, перехідного, регулювання, спосіб, системі, процесу, оптимізації
Формула / Реферат:
1. Спосіб оптимізації перехідного процесу в системі автоматичного регулювання, що базується на формуванні коректуючого сигналу за умов стрибкоподібної зміни координати вхідної дії, який відрізняється тим, що формують перший сигнал, пропорційний різниці похідних вхідної і вихідної дії системи автоматичного регулювання, та другий сигнал, пропорційний модулю різниці похідних вхідної і вихідної дії системи автоматичного регулювання, та сигнал,...
Система динамічної корекції нестаціонарного об’єкта
Номер патенту: 79959
Опубліковано: 10.08.2007
Автор: Долгін Володимир Прохорович
МПК: G05B 11/01, G05B 13/02
Мітки: об'єкта, динамічної, нестаціонарного, система, корекції
Формула / Реферат:
Система динамічної корекції нестаціонарного об'єкта, яка складається з блока масштабування, блока порівняння, блока послідовної корекції, об’єкта керування і зворотного зв'язку, що охоплює блок послідовної корекції і об'єкт керування, яка відрізняється тим, що зворотний зв'язок складається з суматора з підключеними до його входів масштабуючими підсилювачами, входи яких сполучені з виходами диференційних підсилювачів з коефіцієнтом підсилення,...
Слідкуюча система
Номер патенту: 79546
Опубліковано: 25.06.2007
Автори: Корсун Валентин Петрович, Стефанович Віктор Тарасович, Мотуз Георгій Іванович, Стеба Олександр Михайлович, Кралін Володимир Всеволодович
МПК: G05B 11/00, G05B 11/01
Формула / Реферат:
Слідкуюча система, яка включає вимірювач неузгодженості, перший і другий суматори, перший і другий перетворювачі "код-напруга", підсилювач, двигун, датчик кута, функціональний кодуючий перетворювач і коректуючий блок, до складу якого входять блок масштабуючого коефіцієнта, перший і другий випрямляючі модулі, пороговий компаратор і блок множення, при цьому вихід першого суматора через перший перетворювач «код-напруга» підключений до...
Слідкуюча система
Номер патенту: 78405
Опубліковано: 15.03.2007
Автори: Мотуз Георгій Іванович, Кралін Володимир Всеволодович, Стефанович Віктор Тарасович, Стеба Олександр Михайлович, Корсун Валентин Петрович
МПК: G05B 11/00, G05B 11/01
Формула / Реферат:
Слідкуюча система, яка включає вимірювач неузгодженості, перший суматор, перший і другий перетворювачі "код-напруга", підсилювач, двигун, датчик кута, функціональний кодуючий перетворювач і коректуючий блок, до складу якого входять другий суматор, випрямний модуль і пороговий компаратор, при цьому вихід першого перетворювача "код-напруга" з'єднаний з неінвертуючим першим входом першого суматора, вихід якого через...
Пристрій автоматичного захисту молотильного апарата і силової установки зернозбирального комбайна
Номер патенту: 76801
Опубліковано: 15.09.2006
Автори: Буряченко Володимир Іванович, Шамановський Олександр Дмитрович, Качан Володимир Тимофійович, Шляховер Віктор Якович, Макаров Сергій Миколайович, Шляховер Сергій Вікторович, Шамановський Анатолій Дмитрович, Митрофанов Олександр Петрович
МПК: G05B 11/01, A01F 12/18
Мітки: пристрій, апарата, автоматичного, силової, установки, молотильного, комбайна, зернозбирального, захисту
Формула / Реферат:
Пристрій автоматичного захисту молотильного апарата і силової установки зернозбирального комбайна, що містить датчик частоти обертання вала, який відрізняється тим, що датчик частоти обертання вала встановлено на валу силової установки, додатково встановлено датчик частоти обертання коліс моста та датчик частоти обертання вала робочого органа, наприклад вітрорешітної системи очищення або соломовідокремлюючого пристрою, причому всі датчики...
Спосіб частотного регулювання психічного стану людини “квант”
Номер патенту: 15432
Опубліковано: 17.07.2006
Автор: Гончаренко Микола Якович
МПК: G05B 11/01
Мітки: людини, психічного, стану, регулювання, квант-2, частотного, спосіб
Формула / Реферат:
Спосіб частотного регулювання психічного стану людини, що полягає в застосуванні впливу темпу і ритму зовнішнього джерела частот на психофізичний стан людини, який відрізняється тим, що гармонізація самопочуття користувача досягається шляхом впливу на усі слухові та зорові рецептори-аналізатори світовими та звуковими сигналами повного спектра та повної октави, початкова частота яких співпадає з початковою частотою пульсу людини, і за...
Спосіб корекції нестаціонарної динамічної системи
Номер патенту: 13004
Опубліковано: 15.03.2006
Автори: Долгін Володимир Прохорович, Долгін Ігор Володимирович
МПК: G05B 11/01
Мітки: корекції, системі, динамічної, нестаціонарної, спосіб
Формула / Реферат:
Спосіб корекції нестаціонарної динамічної системи, заснований на введенні ланок масштабування, корекції і зворотного зв'язку, який відрізняється тим, що вводять ланку послідовної корекції і задають її передавальну функцію, рівну зворотному значенню чисельника передавальної функції коректованої системи, яку охоплюють разом з коректованою системою ланкою зворотного зв'язку, що є форсуючою ланкою, порядок якої вибирають рівним порядку знаменника...
Пристрій для контролю оптичної зі зворотним зв`язком слідкуючої системи для позиціювання об`єкта

Номер патенту: 12819
Опубліковано: 15.03.2006
Автори: Парняков Євген Серафимович, Мохамад Рашик Улла Бейг Мирза
МПК: G05B 11/01
Мітки: позиціювання, контролю, оптично, об'єкта, зв'язком, системі, зворотним, слідкуючої, пристрій
Формула / Реферат:
Пристрій для контролю оптичної зі зворотним зв'язком слідкуючої системи для позиціювання об'єкта, що містить два теодоліти, дзеркальну підкладку, який відрізняється тим, що він містить у собі двосторонню дзеркальну насадку з паспортизованим кутом між її відбиваючими поверхнями, розміщену на корпусі автоколімаційної зорової труби першого теодоліта, і додатковий дзеркально-відбиваючий елемент, встановлений на слідкуючому корпусі зазначеної...
Квазінейрорегулятор для електромеханічної системи
Номер патенту: 12362
Опубліковано: 15.02.2006
Автори: Полянська Ірина Сергіївна, Руденко Андрій Валентинович, Клепіков Володимир Борисович, Колотіло Віталій Іванович
МПК: G05B 11/01, G05B 5/00
Мітки: електромеханічної, системі, квазінейрорегулятор
Формула / Реферат:
1. Квазінейрорегулятор для електромеханічної системи, виконаний по архітектурі найпростішої нейронної мережі, що містить кілька елементів затримки, кілька вхідних нейронів і один вихідний, який відрізняється тим, що число вхідних нейронів вибирається не довільно, а визначається на одиницю більшим за порядок характеристичного полінома системи, коефіцієнти ваги визначаються із співвідношень, отриманих шляхом синтезу модального регулятора для...
Слідкуючий електропривід верстатів з чпу
Номер патенту: 74967
Опубліковано: 15.02.2006
Автори: Просянов Олег Федорович, Квасницький Вячеслав Федорович, Романовський Георгій Федорович, Верещаго Євген Миколайович
МПК: G05B 13/00, G05B 11/01
Мітки: слідкуючий, електропривід, верстатів, чпу
Формула / Реферат:
Слідкуючий електропривід верстатів з ЧПУ, що містить силову частину у вигляді двигуна постійного струму з незалежним збудженням, який живиться від транзисторного перетворювача, з'єднаного через редуктор з виконавчим механізмом, а також з’єднаного зворотним зв'язком з датчиками швидкості і положення, та керуючу частину у вигляді контуру регулювання положення, який складається з датчика положення, першого суматора, перший вхід якого...
Нечіткий регулятор змінних діапазонів

Номер патенту: 74706
Опубліковано: 16.01.2006
Автори: Яременко Володимир Миколайович, Гостєв Володимир Іванович
МПК: G05B 11/36, G05B 11/01
Мітки: нечіткий, діапазонів, змінних, регулятор
Формула / Реферат:
Нечіткий регулятор змінних діапазонів, що містить блок оцінки похідних помилки, перший, другий та третій виходи якого з'єднані відповідно з першим, другим та третім входами блока фазування, перший, другий та третій виходи якого з'єднані відповідно з першим, другим та третім входами блока формування логічного рішення, а блок формування логічного рішення з'єднаний з першим входом блока дефазування, який відрізняється тим, що він додатково...
Слідкуюча система
Номер патенту: 63756
Опубліковано: 15.08.2005
Автори: Кралін Володимир Всеволодович, Старков Юрій Володимирович, Корсун Валентин Петрович, Мотуз Георгій Іванович, Стеба Олександр Михайлович, Орляк Микола Васильович, Стефанович Віктор Тарасович
МПК: G05B 11/01, G05B 11/00
Формула / Реферат:
Лінійний хвильовий п'єзоелектричний двигун, що містить дві притиснуті одна до одної однією або двома плоскими фрикційними поверхнями дві частини з можливістю їх взаємного зміщення, одна з яких є п'єзоелемент у формі бруска з трьома парами електродів на плоских протилежних поверхнях, крайні з яких перехресно з'єднані між собою, між якими розміщена третя пара електродів, який відрізняється тим, що брусок виконаний з одного матеріалу постійного...
Спосіб оптимізації перехідного процесу у системі автоматичного регулювання та пристрій для його реалізації
Номер патенту: 62734
Опубліковано: 15.08.2005
Автори: Мотуз Георгій Іванович, Кралін Володимир Всеволодович, Корсун Валентин Петрович, Старков Юрій Володимирович, Демченко Леонтій Іванович
МПК: G05B 11/01, G05B 11/00
Мітки: спосіб, процесу, оптимізації, регулювання, пристрій, автоматичного, перехідного, системі, реалізації
Формула / Реферат:
Засіб для лікування і профілактики гострих респіраторних хвороб молодняку сільськогосподарських тварин містить тримекаїн, наповнювач, розчинник. Додатково засіб містить тимол, хладон, як наповнювач - гліцерин, як розчинник- спирт етиловий.
Пристрій для керування приводом запірного органа
Номер патенту: 49401
Опубліковано: 15.06.2005
Автори: Золотарьов Олексій Михайлович, Виродов Валерій Олександрович, Беккер Михайло Вікторович, Старовойтов Володимир Гербертович, Волчков Іван Іванович, Бантюков Євген Миколайович, Пітірімов Олександр Вікторович, Колодяжний Валерій Васильович, Коток Валерій Борисович, Гордієнко Ігор Анатолієвич, Нєстєрцов Юрій Євгенович
МПК: H01H 47/00, G05B 11/01
Мітки: органа, запірного, керування, приводом, пристрій
Формула / Реферат:
Пристрій для керування приводом запірного органа, що містить мережну шину, формувач імпульсів, блок контролю витоку, блок місцевого керування, блок керування, до перших входів-виходів якого підключена мережна шина, до других входів - виходи формувача імпульсів, до третього входу - вихід блока контролю витоку, до четвертих входів - виходи блока місцевого керування, перший, другий і третій ключі, вхід кожного з яких з'єднаний з відповідним...
Пристрій для керування приводом запірного органа
Номер патенту: 69022
Опубліковано: 16.08.2004
Автори: Саркісов Володимир Олександрович, Бантюков Євген Миколайович, Лінчевський Михайло Петрович, Колодяжний Валерій Васильович, Старовойтов Володимир Гербертович, Лопатін Володимир Олексійович, Коломєєв Валентин Миколайович, Золотарьов Олексій Михайлович, Пітірімов Олександр Вікторович, Волчков Іван Іванович, Коток Валерій Борисович
МПК: H01H 47/00, G05B 11/01
Мітки: запірного, органа, пристрій, керування, приводом
Формула / Реферат:
Пристрій для керування приводом запірного органа, що містить формувач імпульсів, блок контролю витоку, блок місцевого керування, запам'ятовуючий пристрій, блок керування, до других входів якого підключені виходи формувача імпульсів, до третього - вихід блока контролю витоку, до четвертих - виходи блока місцевого керування, до шостих - входи-виходи запам'ятовуючого пристрою, перший, другий і третій ключі, вхід кожного з яких з'єднаний з...
Слідкуюча система
Номер патенту: 62671
Опубліковано: 15.12.2003
Автори: Соколов Юрий Миколайович, Субота Анатолій Максимович, Мухлаєв Сергій Вікторович, Клименко Віталій Валерійович
МПК: F15B 9/00, G05B 19/02, G05B 11/01 ...
Формула / Реферат:
Слідкуюча система, що містить датчик положення вхідного вала, датчик положення вихідного вала, вимірювач неузгодження, підсилювач, привід навантаження, яка відрізняється тим, що додатково містить мікроконтролер, який через узгоджуючий інтерфейс з'єднаний з входом крокового двигуна, вихідний вал якого через редуктор і кінематичний зв'язок з'єднаний з ротором датчика положення вхідного вала, вихід якого через перший підсилювач з'єднаний з одним...
Спосіб компенсації амплітудно-фазових викривлень у системі керування обертової ракети
Номер патенту: 49095
Опубліковано: 16.09.2002
Автори: Кузьмін В'ячеслав Павлович, Доценко Борис Іванович, Косовенко Євген Вікторович, Коростельов Олег Петрович, Семенов Леонід Антонович
МПК: G05B 11/01, F42B 15/01
Мітки: ракети, компенсації, амплітудно-фазових, керування, системі, обертової, спосіб, викривлень
Формула / Реферат:
Спосіб компенсації амплітудно-фазових викривлень у системі керування обертової ракети, заснований на вимірі динамічних викривлень, внесених елементами системи керування в модульований за допомогою синусно-косинусного перетворювача і гіроскопічного датчика кута крену управляючий сигнал, подачі на вхід слідкуючого приводу скоригованого сигналу, який відрізняється тим, що для компенсації амплітудних і фазових викривлень вхідний сигнал на привід...
Слідкуючий електропривід зі змінним моментом інерції

Номер патенту: 36098
Опубліковано: 16.04.2001
Автори: Аркадьєв Віктор Юрійович, Боярчук Володимир Петрович, Балін Генадій Миколайович, Пекеліс Дмитро Аркадійович, Лебеденко Юрій Олександрович
МПК: G05B 11/01, G05B 13/02
Мітки: інерції, слідкуючий, змінним, електропривід, моментом
Текст:
...зміна сигналу з виходу функціонального регулятора 12, що еквівалентно зміні параметрів самоналагоджуваного регулятору 9 швидкості. Сигнал джерела 14 опорного струму, пропорційний статичному струму ІС електродвигуна, й дат чика 7 струму якорю ІЯ, електродвигуна 2, просумовані суматором 15, формують на його виході сигнал динамічного моменту електроприводу Мдин Сm(ІЯ-ІС), де Сm - конструктивна постійна еле= ктродвигуна, яка установлює...
Пристрій управління транспортною системою
Номер патенту: 33406
Опубліковано: 15.02.2001
Автори: Заміховський Леонід Михайлович, Долішній Богдан Семенович
МПК: G05B 11/01
Мітки: пристрій, транспортною, управління, системою
Текст:
...шина 17 — шиною подачі сигналу на попередню ступінь рольганга, друга вихідна шина 18 — шиною подачі сигналу включення двигуна рольганга транспортної системи Введені елементи блокування СІ та С2, дозволяють підтримувати номінальне навантаження рольгангів за рахунок затримки сигнал> при переключенні першого та другого елементів "І" 1, 5 з логічної "1" в "0" Замша RS-трігера реверсивним лічильником "СТ2/10" 3 з супутними логічними...
Пристрій для автоматичного управління насосним агрегатом
Номер патенту: 27851
Опубліковано: 16.10.2000
Автори: Матвієнко Микола Павлович, Захарюгін Олександр Дмитрович
МПК: G05B 11/01, F04B 49/00
Мітки: управління, автоматичного, агрегатом, пристрій, насосним
Текст:
...работает следующим образом: В исходной состоянии конденсатор 65 R-C цепочки зашунтирован открытым выходным транзистором программируемой логической матрицы 15 и на выходы таймера поддерживается высокий потенциал. При закрытии выходного транзистора программируемой логической матрицы 15, конденсатор 65 начинает заряжаться через резисторы 63,64 й на выходе 3 таймера появится низкий уровень потенциала с задержкой равной постоянной времени R-C...