Система динамічної корекції нестаціонарного об’єкта
Формула / Реферат
Система динамічної корекції нестаціонарного об'єкта, яка складається з блока масштабування, блока порівняння, блока послідовної корекції, об’єкта керування і зворотного зв'язку, що охоплює блок послідовної корекції і об'єкт керування, яка відрізняється тим, що зворотний зв'язок складається з суматора з підключеними до його входів масштабуючими підсилювачами, входи яких сполучені з виходами диференційних підсилювачів з коефіцієнтом підсилення, рівним зворотній величині кроку дискретизації, на прямі входи яких подані поточні значення сигналу, а на інверсні входи подані попередні значення на один порядок молодших похідних значень сигналу з виходів елементів пам’яті, причому вихід об’єкта керування підключений до блока порівняння через зворотний зв’язок.
Текст
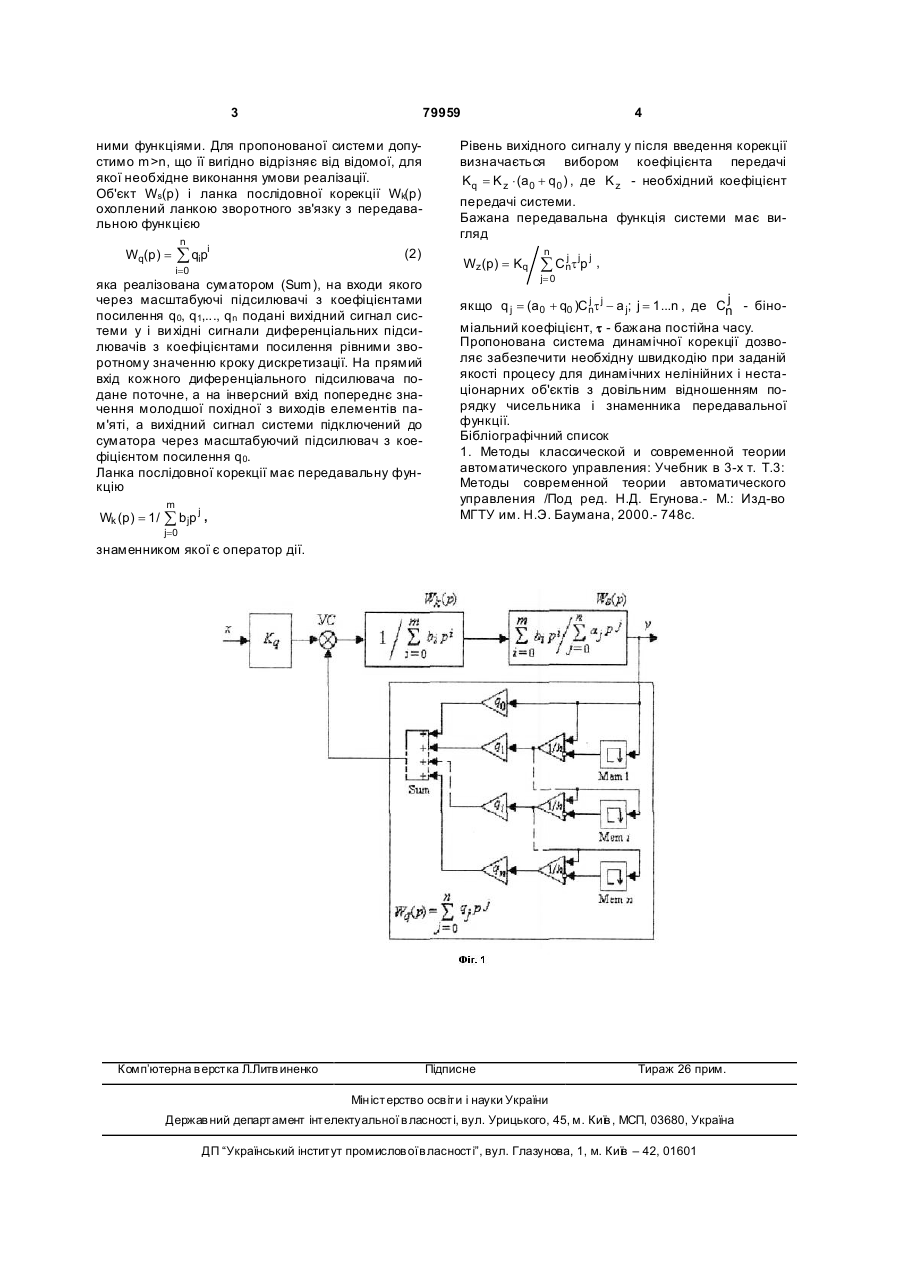
Система динамічної корекції нестаціонарного об'єкта, яка складається з блока масштабування, блока порівняння, блока послідовної корекції, 3 79959 ними функціями. Для пропонованої системи допустимо m>n, що її вигідно відрізняє від відомої, для якої необхідне виконання умови реалізації. Об'єкт Ws(p) і ланка послідовної корекції Wk(p) охоплений ланкою зворотного зв'язку з передавальною функцією n Wq(p) = å qipi (2) i=0 яка реалізована суматором (Sum), на входи якого через масштабуючі підсилювачі з коефіцієнтами посилення q0, q1,..., qn подані вихідний сигнал системи у і ви хідні сигнали диференціальних підсилювачів з коефіцієнтами посилення рівними зворотному значенню кроку дискретизації. На прямий вхід кожного диференціального підсилювача подане поточне, а на інверсний вхід попереднє значення молодшої похідної з виходів елементів пам'яті, а вихідний сигнал системи підключений до суматора через масштабуючий підсилювач з коефіцієнтом посилення q0. Ланка послідовної корекції має передавальну функцію Wk (p ) = 1 / m å bjp j , 4 Рівень вихідного сигналу у після введення корекції визначається вибором коефіцієнта передачі Kq= K z × (a 0 + q 0 ) , де K z - необхідний коефіцієнт передачі системи. Бажана передавальна функція системи має вигляд Wz (p ) = Kq n j j j å Cnt p , j= 0 j j якщо q j = (a0 + q0 )Cnt j - a j; j = 1...n , де Cn - біноміальний коефіцієнт, t - бажана постійна часу. Пропонована система динамічної корекції дозволяє забезпечити необхідну швидкодію при заданій якості процесу для динамічних нелінійних і нестаціонарних об'єктів з довільним відношенням порядку чисельника і знаменника передавальної функції. Бібліографічний список 1. Методы классической и современной теории автоматического управления: Учебник в 3-х т. Т.3: Методы современной теории автоматического управления /Под ред. Н.Д. Егунова.- М.: Изд-во МГТУ им. Н.Э. Баумана, 2000.- 748с. j=0 знаменником якої є оператор дії. Комп’ютерна в ерстка Л.Литв иненко Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for dynamically correcting the state of a time-dependent object
Автори англійськоюDolhin Volodymyr Prohorovych
Назва патенту російськоюСистема для динамической коррекции состояния нестационарного объекта
Автори російськоюДолгин Владимир Прохорович
МПК / Мітки
МПК: G05B 13/02, G05B 11/01
Мітки: корекції, нестаціонарного, об'єкта, динамічної, система
Код посилання
<a href="https://ua.patents.su/2-79959-sistema-dinamichno-korekci-nestacionarnogo-obehkta.html" target="_blank" rel="follow" title="База патентів України">Система динамічної корекції нестаціонарного об’єкта</a>
Спосіб корекції нестаціонарної динамічної системи
Номер патенту: 13004
Опубліковано: 15.03.2006
Автори: Долгін Володимир Прохорович, Долгін Ігор Володимирович
МПК: G05B 11/01
Мітки: системі, нестаціонарної, спосіб, корекції, динамічної
Формула / Реферат:
Спосіб корекції нестаціонарної динамічної системи, заснований на введенні ланок масштабування, корекції і зворотного зв'язку, який відрізняється тим, що вводять ланку послідовної корекції і задають її передавальну функцію, рівну зворотному значенню чисельника передавальної функції коректованої системи, яку охоплюють разом з коректованою системою ланкою зворотного зв'язку, що є форсуючою ланкою, порядок якої вибирають рівним порядку знаменника...
Пристрій динамічної корекції

Номер патенту: 23336
Опубліковано: 25.05.2007
Автори: Долгін Ігор Володимирович, Долгін Володимир Прохорович
МПК: H03J 3/00
Мітки: пристрій, динамічної, корекції
Формула / Реферат:
Пристрій динамічної корекції з нормованою операторною дробово-раціональною передавальною функцією,де W(s) - нормована операторна дробово-раціональна передавальна функція, s - оператор Лапласа, n - порядок коректора, - коефіцієнти оператора передавальної...
Пристрій для динамічної корекції рухів людини
Номер патенту: 66873
Опубліковано: 15.06.2004
Автори: Котеляк Оксана Зенонівна, Гордієвич Степан Михайлович, Волошин Богдан Дмитрович, Козявкін Володимир Ілліч
МПК: A61F 5/01, A63B 21/02
Мітки: корекції, пристрій, рухів, динамічної, людини
Формула / Реферат:
1. Пристрій для динамічної корекції руху людини у вигляді опорних елементів плечового пояса, таза, ліктів, стоп, колін, еластичних тяг, фіксуючих елементів, який відрізняється тим, що опорний елемент плечового пояса виготовлений у вигляді жилета, поверхні опорних елементів та еластичних пружних тяг виконані із матеріалу, липучого з однієї сторони, здатного до закріплення кожної еластичної пружної тяги в довільній точці опорних елементів ,...
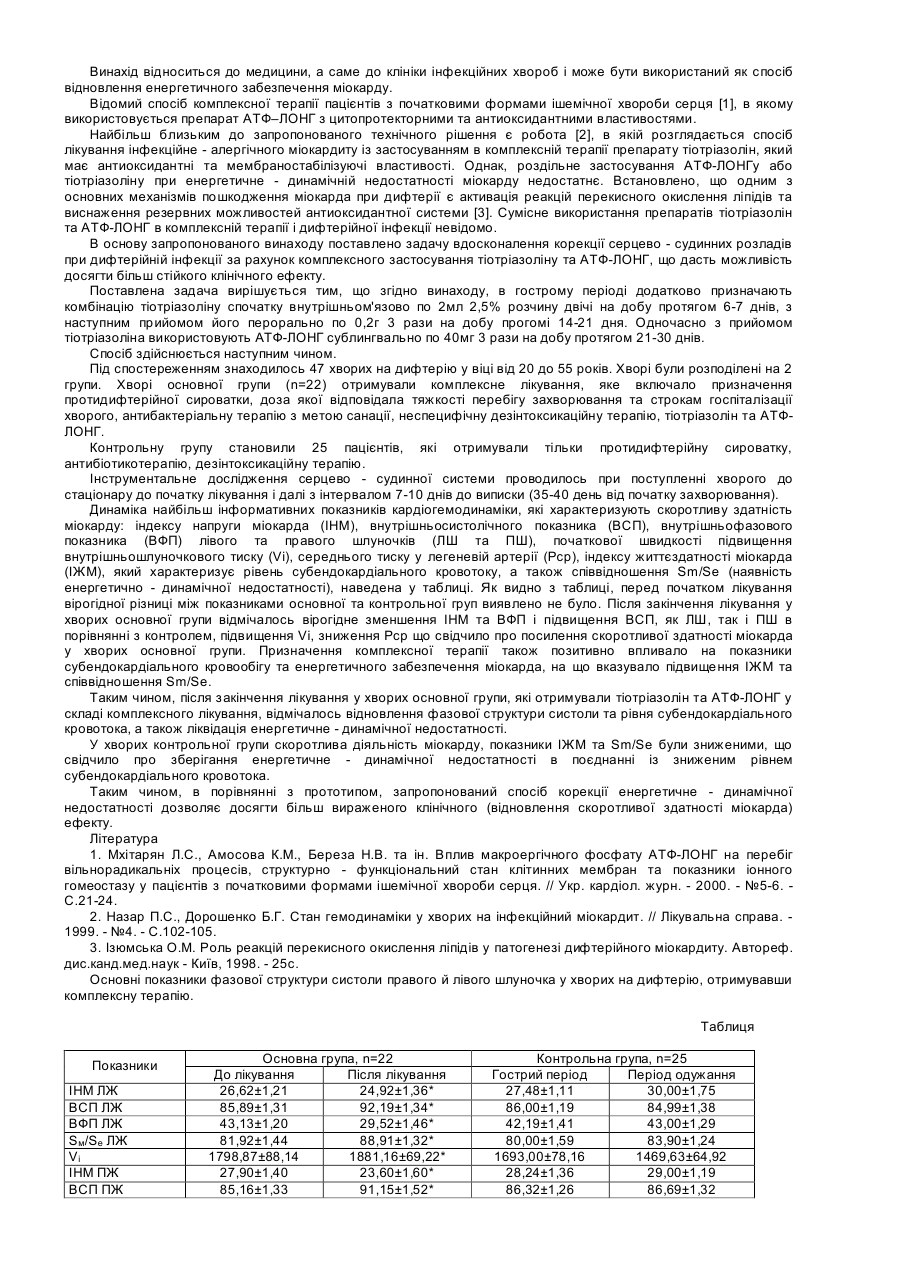
Спосіб корекції енергетично-динамічної недостатності міокарда при дифтерійній інфекції
Номер патенту: 64650
Опубліковано: 16.02.2004
Автор: Савчук Антоніна Іванівна
МПК: A61K 31/00
Мітки: спосіб, недостатності, корекції, міокарда, дифтерійний, інфекції, енергетично-динамічної
Формула / Реферат:
Спосіб корекції енергетично-динамічної недостатності міокарда при дифтерійній інфекції в гострому періоді шляхом комплексної комбінації протидифтерійної сироватки, антибіотика групи пеніциліну та дезінтоксикаційної терапії, який відрізняється тим, що додатково призначають комбінацію тіотриазоліну спочатку внутрішньом`язово по 2 мл 2,5% розчину двічі на добу протягом 6-7 днів, з наступним прийомом його перорально по 0,2 г 3 рази на добу...
Пристрій визначення вектора початкового стану динамічної системи
Номер патенту: 15794
Опубліковано: 17.07.2006
Автори: Долгін Ігор Володимирович, Долгін Володимир Прохорович
МПК: G05B 5/00
Мітки: стану, системі, пристрій, вектора, динамічної, початкового, визначення
Формула / Реферат:
Пристрій визначення вектора початкового стану динамічної системи, що виконує аналіз її стану на основі вхідного сигналу і передавальної функції, який відрізняється тим, що введені послідовно сполучені модулі визначення компонентів вектора станів системи, що містять вхідний підсилювач з коефіцієнтом посилення, рівним коефіцієнту оператора дії, що має індекс, відповідний різниці порядку системи і порядку обчислюваної похідної, проміжні...
Попередній патент: Пристрій і спосіб багатостадійного розділення флюїдів
Наступний патент: Ендопротез плечового суглоба
Випадковий патент: Спосіб виробництва зерен, що вибухнули