Гравіметр
Номер патенту: 86005
Опубліковано: 25.03.2009
Автори: Подчашинський Юрій Олександрович, Безвесільна Олена Миколаївна, Коробійчук Ігор Вацлавович
Формула / Реферат
Гравіметр, що містить двостепеневий динамічно настроюваний гіроскоп (1), на корпусі якого встановлені датчик (3) кута повороту і датчик (4) моменту, який відрізняється тим, що центр мас ротора (2) двоступеневого динамічно настроюваного гіроскопа (1) зміщений у напрямку, перпендикулярному до осі його обертання, додатково введений пристрій (5) обчислення і компенсації похибок вимірювань, обумовлених викривленням траєкторії руху ротора (2), нерівністю нулю показника згасання прецесійних коливань ротора та неізохронністю цих прецесійних коливань, неспівпаданням значення колової частоти прецесійних коливань, що використовується в алгоритмах оцінювання, зі значенням дійсної колової частоти прецесійних коливань ротора (2), причому вихід датчика (3) кута повороту підключено до входу пристрою (5) обчислення і компенсації похибок вимірювань.
Текст
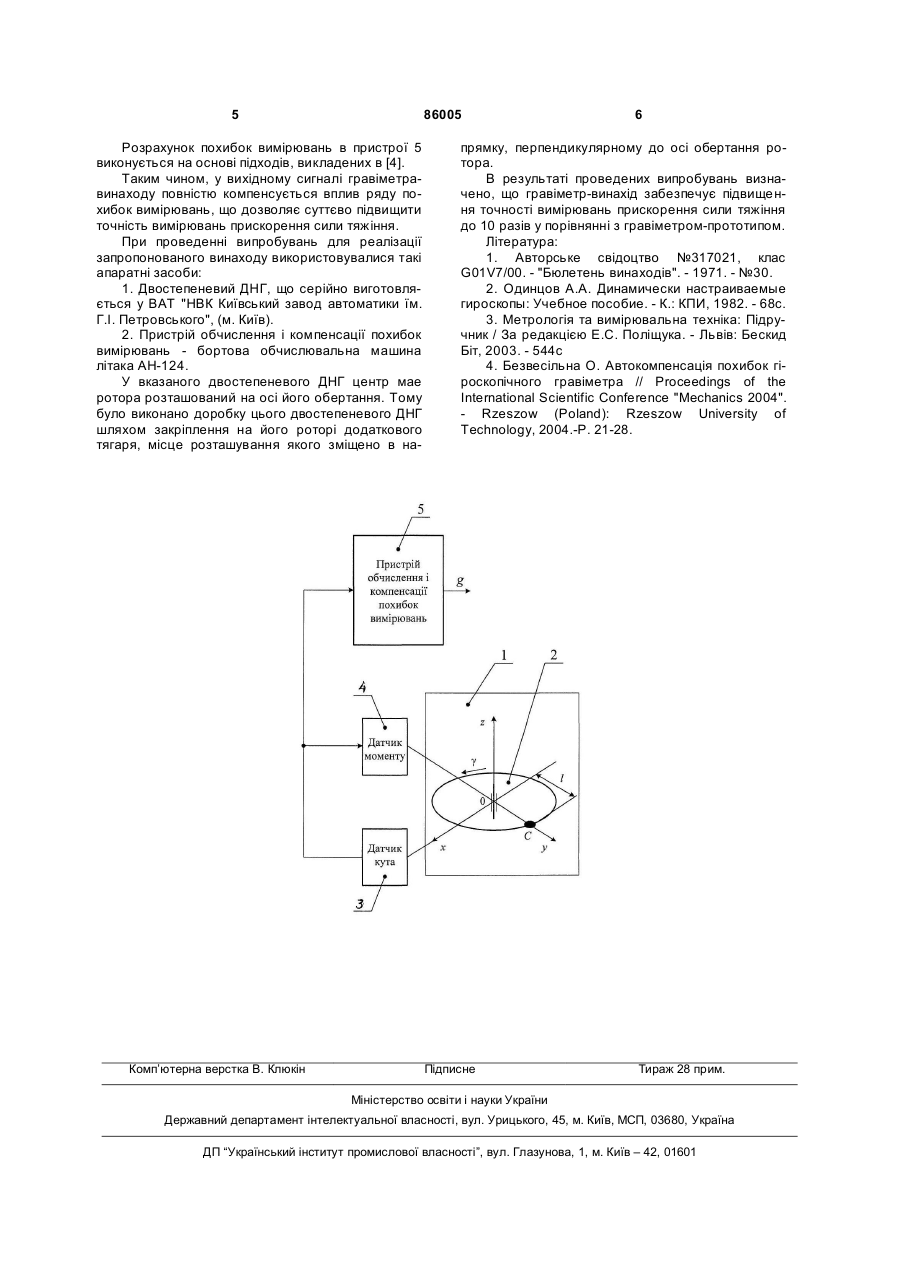
Гравіметр, що містить двостепеневий динамічно настроюваний гіроскоп (1), на корпусі якого 3 містять двостепеневий ДНГ, на корпусі якого встановлені датчик моменту і датчик кута повороту. Проте, на відміну від гравіметра-винаходу, у гравіметрі-прототипі центр мас ротора двостепеневого ДНГ розташований на осі його обертання. Вихідною величиною гравіметра-прототипу є кутова швидкість повороту ротора двостепеневого ДНГ відносно основи. Тому гравіметр-прототип потребує додаткових перетворюючих елементів для визначення прискорення сили тяжіння, які вносять додаткові похибки в результат вимірювань. Крім того, у гравіМетрі-прототипі відсутній пристрій обчислення і компенсації похибок вимірювань. Тому результат вимірювань, отриманий за допомогою гравіметра-прототипу, містить великі похибки вимірювань. Ці похибки обумовлені нелінійними викривленнями траєкторії руху ротора ЧЕ; нерівністю нулю показника загасання прецесійних коливань через дію на ротор ЧЕ моментів типу в'язкого тертя; неізохронністю прецесійних коливань; неспівпаданням значення колової частоти прецесійних коливань, що використовується в алгоритмах оцінювання, зі значенням колової частоти прецесійних коливань ротора ЧЕ; завадами, що викривляють закон руху ротора ЧЕ. Таким чином, суттєвим недоліком гравіметрапрототипу є низька точність вимірювань. В основу винаходу поставлена задача вдосконалення гравіметра, щоб забезпечити підвищення точності вимірювань прискорення сили тяжіння. Поставлена задача вирішується шляхом того, що центр мас ротора двостепеневого динамічно настроюваного гіроскопа зміщений у напрямку, перпендикулярному до осі його обертання, додатково введений пристрій обчислення і компенсації похибок вимірювань, обумовлених викривленням траєкторії руху ротора, нерівністю нулю показника згасання прецесійних коливань ротора та неізохронністю цих прецесійних коливань, неспівпаданням значення колової частоти прецесійних коливань, що використовується в алгоритмах оцінювання, зі значенням дійсної колової частоти прецесійних коливань ротора, причому вихід датчика кута повороту підключено до входу пристрою обчислення і компенсації похибок вимірювань. Підвищення точності вимірювань в гравіметрівинаході забезпечується за рахунок того, що центр мас ротора двостепеневого ДНГ зміщений в напрямку, перпендикулярному до осі його обертання і тому цей гравіметр виконує безпосереднє вимірювання прискорення сили тяжіння. Оскільки в гравіметрі-винаході виконується безпосереднє вимірювання прискорення сили тяжіння, то в ньому відсутні похибки, пов'язані з додатковими перетворення вимірювального сигналу. Завдяки безпосередньому вимірюванню прискорення сили тяжіння з'являється можливість введення до складу гравіметра-винаходу пристрою обчислення і компенсації похибок. Цей пристрій виконує обчислення і компенсацію складових частин похибок вимірювань, що виникають через: нелінійні викривлення траєкторії руху ротора ЧЕ гравіметра, нерівність нулю показника загасання прецесійних коливань через дію на ротор ЧЕ моментів типу в'язкого тертя; неізохронністю преце 86005 4 сійних коливань; неспівпадання значення колової частоти прецесійних коливань, що використовується в алгоритмах оцінювання, зі значенням колової частоти прецесійних коливань ротора ЧЕ; завади, що викривляють закон руху ротора ЧЕ. Таким чином, у вихідному сигналі гравіметравинаходу повністю компенсується вплив ряду похибок вимірювань. Якщо ці похибки не компенсувати запропонованим способом, то вони по величині можуть дорівнювати значенню корисного сигналу, тобто бути неприпустимо великими. Компенсація впливу похибок дозволяє суттєво підвищити точність вимірювань прискорення сили тяжіння. Суть винаходу пояснюється кресленням, на якому зображено структурну схему гравіметра. Гравіметр містить двостепеневий ДНГ 1 з ротором 2, на корпусі якого встановлені датчик 4 моменту і датчик 3 кута повороту, та пристрій 5 обчислення і компенсації похибок вимірювань. Вихід датчика 3 кута повороту підключено до входу пристрою 5 обчислення і компенсації похибок вимірювань. Центр мас С ротора 2 зміщений в напрямку , перпендикулярному до осі його обертання на величину l. Гравіметр працює таким чином. За допомогою приводного двигуна (на кресленні не показаний) ротор 2 обертається з постійною кутовою швидкістю γ. При відсутності зовнішніх впливів ротор 2 обертається в горизонтальній площині. При наявності прискорення сили тяжіння уздовж його осі обертання ротор 2 почне відхилятись. В результаті отримуємо сигнал на виході датчика 3 кута повороту, який поступає на вхід пристрою 5. Пристрій 5 виконує обчислення і компенсацію похибок вимірювань. Датчик 4 моменту використовується для організації компенсаційного методу вимірювань на основі ДНГ. Виходом гравіметра є вихід пристрою 5 обчислення і компенсації похибок вимірювань. Результати вимірювань прискорення сили тяжіння містять похибки ΔRі, обумовлені дією на гравіметр таких факторів: 1. ΔR1 - нелінійні викривлення траєкторії руху ротора 2; 2. ΔR2 - нерівність нулю показника згасання прецесійних коливань ротора 2 через дію на гіроскоп моментів типу в'язкого тертя; 3. ΔR3 - неізохронність прецесійних коливань ротора 2; 4. ΔR4- неспівпадання значення колової частот прецесійних коливань, що використовується в алгоритмах оцінювання, зі значенням колової частоти прецесійних коливань ротора 2; 5. ΔR5- завади, що викривляють закон руху ротора 2. Компенсація похибок вимірювань прискорення сили тяжіння виконується шляхом їх виключення за відомою формулою [3]: g = R - åiDRi де g - вихідний сигнал гравіметра після компенсації похибок; R - вихідний сигнал датчика 3 кута повороту, пропорційний прискоренню сили тяжіння; 5 86005 Розрахунок похибок вимірювань в пристрої 5 виконується на основі підходів, викладених в [4]. Таким чином, у вихідному сигналі гравіметравинаходу повністю компенсується вплив ряду похибок вимірювань, що дозволяє суттєво підвищити точність вимірювань прискорення сили тяжіння. При проведенні випробувань для реалізації запропонованого винаходу використовувалися такі апаратні засоби: 1. Двостепеневий ДНГ, що серійно виготовляється у ВАТ "НВК Київський завод автоматики їм. Г.І. Петровського", (м. Київ). 2. Пристрій обчислення і компенсації похибок вимірювань - бортова обчислювальна машина літака АН-124. У вказаного двостепеневого ДНГ центр мае ротора розташований на осі його обертання. Тому було виконано доробку цього двостепеневого ДНГ шляхом закріплення на його роторі додаткового тягаря, місце розташування якого зміщено в на Комп’ютерна верстка В. Клюкін 6 прямку, перпендикулярному до осі обертання ротора. В результаті проведених випробувань визначено, що гравіметр-винахід забезпечує підвищення точності вимірювань прискорення сили тяжіння до 10 разів у порівнянні з гравіметром-прототипом. Література: 1. Авторське свідоцтво №317021, клас G01V7/00. - "Бюлетень винаходів". - 1971. - №30. 2. Одинцов А.А. Динамически настраиваемые гироскопы: Учебное пособие. - К.: КПИ, 1982. - 68с. 3. Метрологія та вимірювальна техніка: Підручник / За редакцією Е.С. Поліщука. - Львів: Бескид Біт, 2003. - 544с 4. Безвесільна О. Автокомпенсація похибок гіроскопічного гравіметра // Proceedings of the International Scientific Conference "Mechanics 2004". - Rzeszow (Poland): Rzeszow University of Technology, 2004.-P. 21-28. Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюGravimeter
Автори англійськоюBezvesilna Olena Mykolaivna, Korobiichuk Ihor Vatslavovych, Podchashynskyi Yurii Oleksandrovych
Назва патенту російськоюГравиметр
Автори російськоюБезвесильна Елена Николаевна, Коробийчук Игорь Вацлавович, Подчашинский Юрий Александрович
МПК / Мітки
МПК: G01V 7/00, G01C 19/00
Мітки: гравіметр
Код посилання
<a href="https://ua.patents.su/3-86005-gravimetr.html" target="_blank" rel="follow" title="База патентів України">Гравіметр</a>
Гравіметр
Номер патенту: 78620
Опубліковано: 10.04.2007
Автори: Безвесільна Олена Миколаївна, Нечай Сергій Олексійович, Коробійчук Ігор Вацлавович, Подчашинський Юрій Олександрович
МПК: G01V 7/00
Мітки: гравіметр
Формула / Реферат:
Гравіметр, що містить двоступеневий динамічно настроюваний гіроскоп (1), до якого підключений датчик (4) моменту, ротор (2) та датчик (3) кута повороту, який відрізняється тим, що центр мас ротора (2) двоступеневого динамічно настроюваного гіроскопа (1) зміщений відносно осі його обертання, введено фільтр (5) нижніх частот і пристрій (6) обчислення вихідного сигналу гравіметра, причому вхід датчика (3) кута повороту підключено до виходу...
Гравіметр
Номер патенту: 53478
Опубліковано: 15.01.2003
Автори: Нечай Сергій Олексійович, Меншикова Катерина Вікторівна, Безвесільна Олена Миколаївна, Тулупов Дмитро Григорович, Бобруйко Євген Ігоревич
МПК: G01V 7/00
Мітки: гравіметр
Формула / Реферат:
Гравіметр, виконаний на основі триступеневого гіроскопа, що містить ротор, центр мас якого зміщений вздовж осі обертання відносно осей карданового підвісу, датчики кута та датчики моменту для реєстрації та компенсації відхилень ротора, який відрізняється тим, що ротор приєднаний до привідного вала через пружні торсіони, перпендикулярні до осі привідного вала, та карданові кільця, при цьому обертання привідного вала забезпечує двигун, кутова...
Авіаційна гравіметрична система для вимірювань аномалій прискорення сили тяжіння
Номер патенту: 79874
Опубліковано: 25.07.2007
Автори: Подчашинський Юрій Олександрович, Безвесільна Олена Миколаївна
МПК: G01V 7/00
Мітки: авіаційна, сили, тяжіння, аномалій, прискорення, гравіметрична, система, вимірювань
Формула / Реферат:
Авіаційна гравіметрична система для вимірювань аномалій прискорення сили тяжіння, що містить гіроскопічний гравіметр (1), систему визначення навігаційних параметрів (2) та вимірювач висоти (3), які підключені до бортової цифрової обчислювальної машини (БЦОМ) (4), яка відрізняється тим, що гіроскопічний гравіметр (1) містить два триступеневі гіроскопи (8, 9), ротори яких виконані такими, що обертаються в протилежні боки, а їх центри мас...
Гравіметр
Номер патенту: 21067
Опубліковано: 04.11.1997
Автори: Серіков Сергій Анатольйовіч, Кривошеєв Борис Федорович, Абрамов Юрій Олексійович
МПК: G01V 7/00
Мітки: гравіметр
Формула / Реферат:
Гравиметр, содержащий ротор с полостью, заполненной жидким компонентом, имеющим свободную поверхность, двигатель, механически соединенный с ротором, эталонное зеркало, отражающая поверхность которого, выполнена параболической, источник когерентного излучения, полупрозрачное зеркало, установленное под углом 45° к оси симметрии эталонного зеркала и оси симметрии ротора, а также к оптической оси источника когерентного излучения, устройство...
Спосіб стиснення гравіметричної вимірювальної інформації про аномалії прискорення сили тяжіння
Номер патенту: 82763
Опубліковано: 12.05.2008
Автори: Подчашинський Юрій Олександрович, Безвесільна Олена Миколаївна
МПК: G01V 7/00
Мітки: вимірювальної, прискорення, спосіб, сили, тяжіння, стиснення, інформації, аномалії, гравіметричної
Формула / Реферат:
Спосіб стиснення гравіметричної вимірювальної інформації про аномалії прискорення сили тяжіння, що включає стиснення двовимірного масиву цифрових відліків гравіметричної вимірювальної інформації про аномалії прискорення сили тяжіння, який відрізняється тим, що формування масиву здійснюють шляхом занесення в нього цифрових відліків гравіметричної вимірювальної інформації про аномалії прискорення сили тяжіння з урахуванням прив'язки до...
Попередній патент: Багатозарядна зброя
Наступний патент: Спосіб виготовлення термоклейкої підкладки
Випадковий патент: Синергетичні гербіцидні композиції, що містять пропізамід і амінопіралід