Гравіметр
Номер патенту: 21067
Опубліковано: 04.11.1997
Автори: Абрамов Юрій Олексійович, Серіков Сергій Анатольйовіч, Кривошеєв Борис Федорович

Формула / Реферат
Гравиметр, содержащий ротор с полостью, заполненной жидким компонентом, имеющим свободную поверхность, двигатель, механически соединенный с ротором, эталонное зеркало, отражающая поверхность которого, выполнена параболической, источник когерентного излучения, полупрозрачное зеркало, установленное под углом 45° к оси симметрии эталонного зеркала и оси симметрии ротора, а также к оптической оси источника когерентного излучения, устройство регистрации, расположенное на одной оси с источником когерентного излучения и датчик угловой скорости вращения ротора, отличающийся тем, что в него дополнительно введены входной счетчик импульсов, сдвигающий регистр с возможностью параллельной загрузки, параллельный регистр, сумматор, селектор на три направления, оперативное запоминающее устройство (ОЗУ), счетчик адреса и устройство синхронизации, причем счетный вход входного счетчика подключен к выходу датчика угловой скорости, а параллельный выход подключен к входу параллельной загрузки сдвигающего регистра, параллельный выход которого подключен к входу первого операнда сумматора, выход параллельного регистра подключен к входу второго операнда сумматора, и, со смещением на один разряд в сторону старшего разряда, к первому входу селектора, вход параллельного регистра подключен к выходу селектора, вход/выход которого подключен к магистрали данных ОЗУ, магистраль адреса которого подключена к выходу счетчика адреса, выход сумматора подключен ко входу параллельной загрузки сдвигающего регистра и, со смещением на N разрядов в сторону младшего разряда, к магистрали данных ОЗУ, а счетный вход счетчика адреса, а также управляющие входы входного счетчика импульсов, параллельного регистра, сдвигающего регистра, сумматора, селектора, ОЗУ и счетчика адреса подключены соответственно к первому - пятнадцатому выходам устройства синхронизации.
Текст
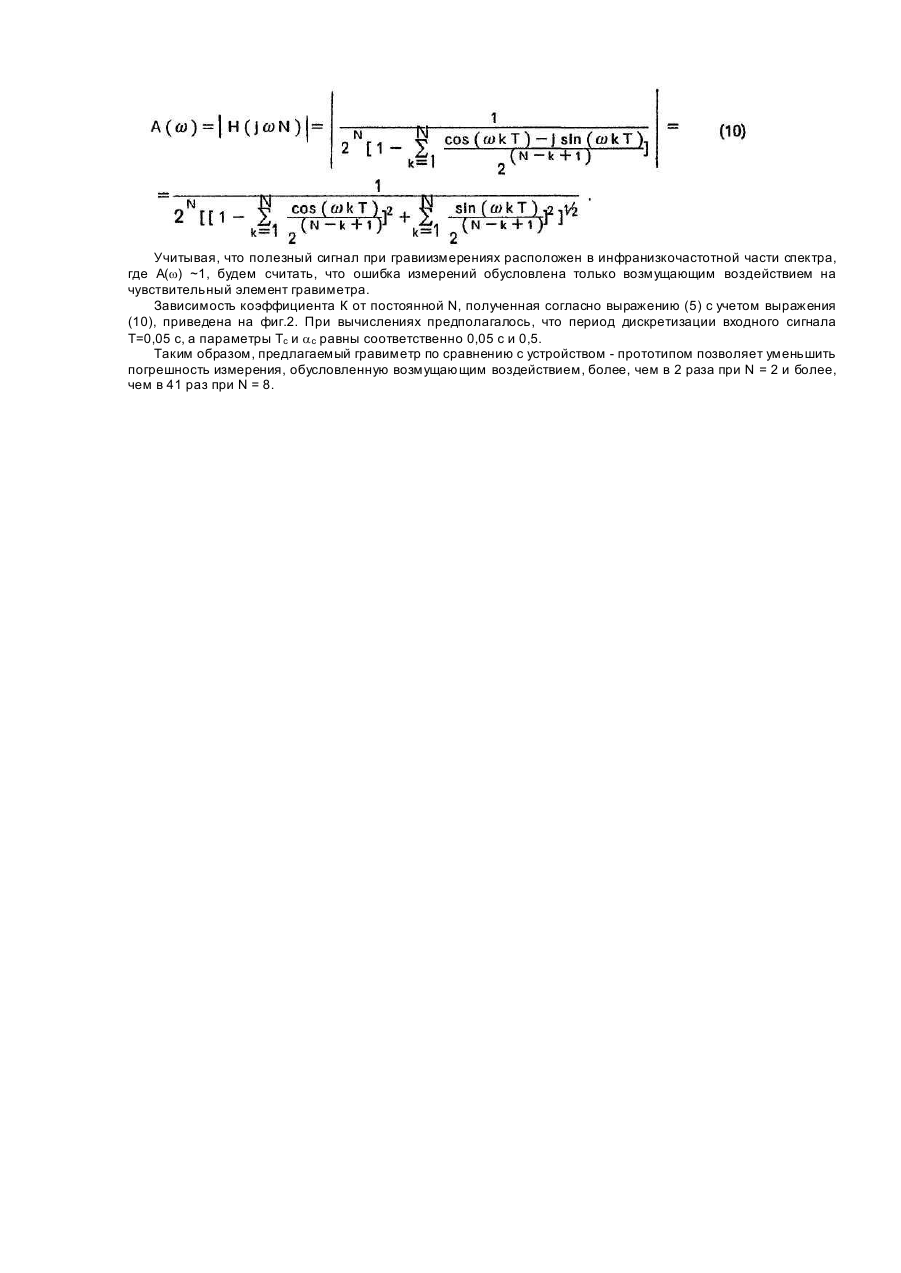
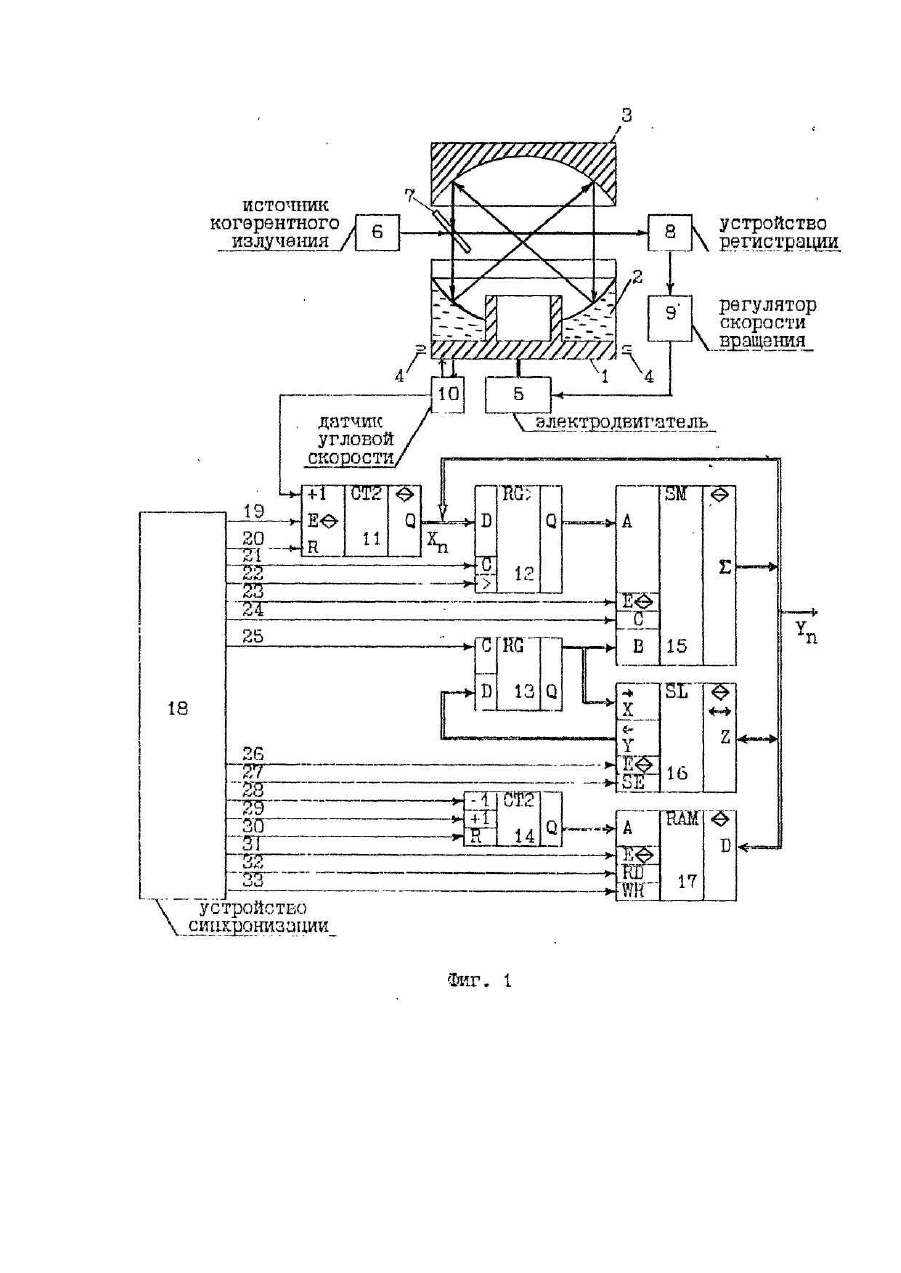
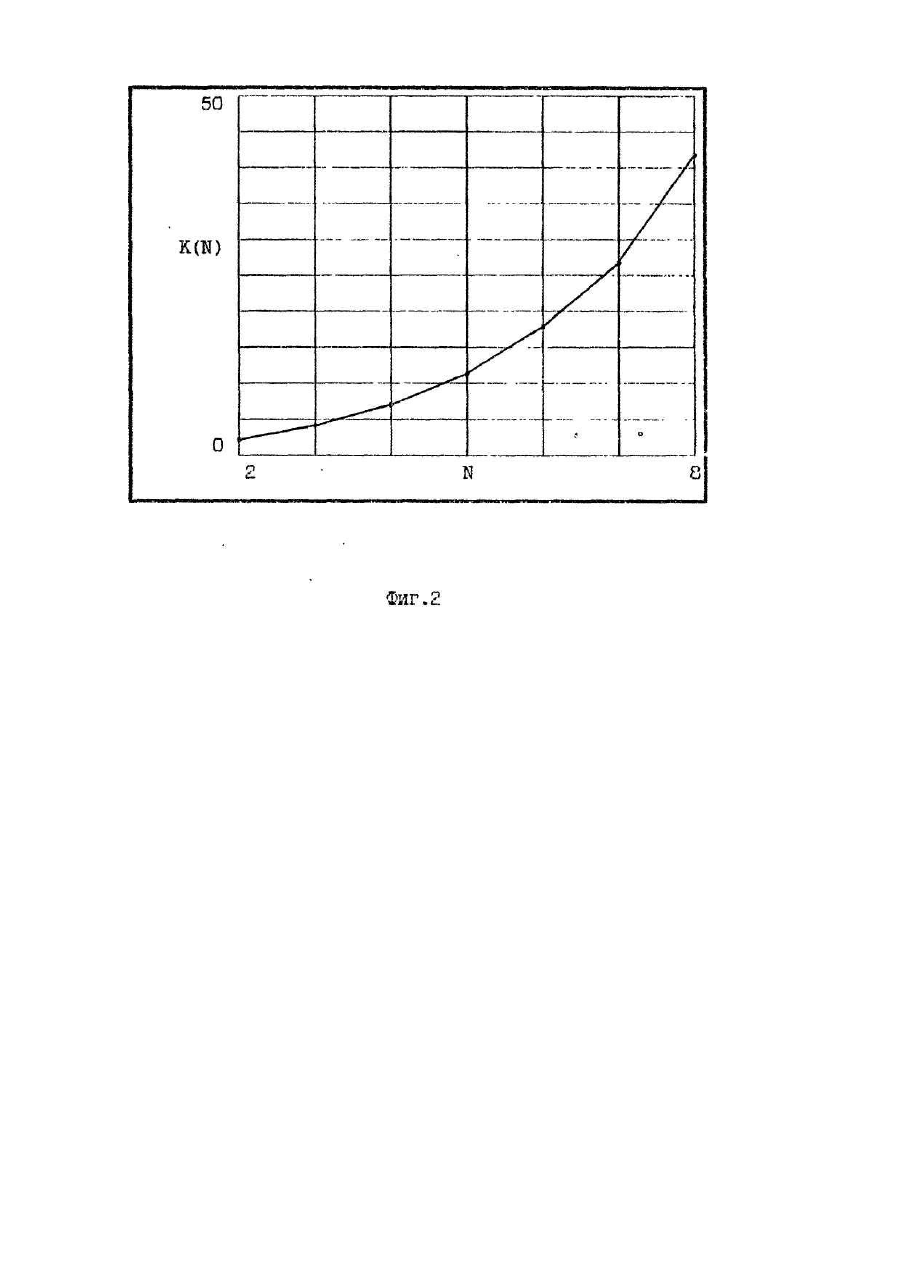
Изобретение относится к геофизике и может быть использовано для измерения относительных и абсолютных значений ускорения силы тяжести. Известен гравиметр [1], содержащий сосуд с демпфирующей жидкостью, электродвигатель, механически соединенный с этим сосудом, сосуд, заполненный жидкостью, имеющей свободную поверхность, плавающий в сосуде с демпфирующей жидкостью, эталонное зеркало, отражающая поверхность которого, выполнена параболической, источник когерентного излучения, полупрозрачное зеркало, установленное под углом 45° к оси симметрии эталонного зеркала и оси симметрии сосуда, а также к оптической оси источника когерентного излучения, блок регистрации, расположенный на одной оси с источником когерентного излучения. Общими признаками аналога и заявляемого устройства являются наличие сосуда (в заявляемом объекте - ротор), заполненного жидкостью, имеющей свободную поверхность, электродвигателя, эталонного зеркала, отражающая поверхность которого, выполнена параболической, источника когерентного излучения, полупрозрачного зеркала, установленного под углом 45° к оси симметрии эталонного зеркала и оси симметрии сосуда, а также к оптической оси источника когерентного излучения, блока регистрации (в заявляемом объекте - устройства регистрации), расположенного на одной оси с источником когерентного излучения. Недостатками этого устройства являются большая температурная погрешность измерений, а также существенная погрешность измерений, обусловленная возмущающими воздействиями со стороны электропривода, остаточной неуравновешенностью ротора, а также вибрациями шарикоподшипников. Из известных, наиболее близким по технической сущности к заявляемому, является чувстви тельный элемент (гравиметр), содержащий ротор с полостью, заполненной жидким компонентом, имеющим свободную зеркальную поверхность, объем которого в полости регулируется при помощи диэлектрической жидкости, имеющей с компонентом границу раздела, двигатель, механически связанный с ротором, эталонное зеркало, отражающая поверхность которого, выполнена параболической, источник когерентного излучения, полупрозрачное зеркало, установленное под углом 45° к оси симметрии эталонного зеркала и оси симметрии ротора, а также к оптической оси источника когерентного излучения, устройство регистрации, расположенное на одной оси с источником когерентного излучения, датчик угло вой скорости вращения ротора, включающий в себя источник излучения, фотоприемник и усилитель, цифроаналоговый преобразователь, аналого-цифровой преобразователь, микропроцессорное устройство, регулятор угловой скорости вращения ротора, фотоприемник с усилителем, кольцевые электроды, цилиндрическую камеру, выполненную в центральной части полости ротора, в которой имеется полость, заполненная диэлектрической жидкостью, капиллярные каналы, выполненные в торце ротора, связывающие полости ротора и камеры, полое кольца, заполненное электрохемилюминесцентной композицией [2]. Общими признаками прототипа и заявляемого устройства являются ротор с полостью, заполненной жидким компонентом, имеющим свободную зеркальную поверхность, двигатель, механически связанный с ротором, эталонное зеркало, отражающая поверхность которого, выполнена параболической, источник когерентного излучения, полупрозрачное зеркало, установленное под углом 45° к оси симметрии эталонного зеркала и оси симметрии ротора, а также к оптической оси источника когерентного излучения, устройство регистрации, расположенное на одной оси с источником когерентного излучения, датчик угловой скорости вращения ротора, включающий в себя источник излучения, фотоприемник и усилитель. Недостатком известного устройства, выбранного в качестве прототипа является большая погрешность измерений, обусловленная возмущающими воздействиями со стороны электропривода, остаточной неуравновешенностью ротора, а также вибрациями шарикоподшипников. В основу изобретения поставлена задача усовершенствования гравиметра путем осуществления первичной обработки информации, поступающей с датчика угловой скорости вращения ротора, и за счет этого обеспечить снижение погрешности измерения, обусловленной возмущающими воздействиями. Поставленная задача достигается тем, что в гравиметр, содержащий ротор с полостью, заполненной жидким компонентом, имеющим свободную поверхность, двигатель, механически соединенный с ротором, эталонное зеркало, отражающая поверхность которого, выполнена параболической, источник когерентного излучения, полупрозрачное зеркало, установленное под углом 45° к оси симметрии эталонного зеркала и оси симметрии ротора, а также к оптической оси источника когерентного излучения, устройство регистрации, расположенное на одной оси с источником когерентного излучения и датчик угловой скорости вращения ротора, согласно изобретению, дополнительно введены входной счетчик импульсов, сдвигающий регистр с возможностью параллельной загрузки, параллельный регистр, сумматор, селектор на три направления, оперативное запоминающее устройство (ОЗУ), счетчик адреса и устройство синхронизации, причем счетный вход входного счетчика подключен к выходу датчика угловой скорости, а параллельный выход - к входу параллельной загрузки сдвигающего регистра, параллельный выход которого подключен к входу первого операнда сумматора, выход параллельного регистра подключен к входу второго операнда сумматора, и, со смещением на один разряд в сторону старшего разряда, к первому входу селектора, вход параллельного регистра подключен к выходу селектора, вход/выход которого подключен к магистрали данных ОЗУ, магистраль адреса которого подключена к выходу счетчика адреса, выход сумматора подключен ко входу параллельной загрузки сдвигающего регистра и, со смещением на N разрядов в сторону младшего разряда, к магистрали данных ОЗУ, а сче тный вход сче тчика адреса, а также управляющие входы входного счетчика импульсов, параллельного регистра, сдвигающего регистра, сумматора, селектора, ОЗУ и счетчика адреса подключены соответственно к первому - пятнадцатому вы ходам устройства син хронизации. Сущность изобретения поясняется чертежами, где на фиг.1 представлена функциональная схема гравиметра; на фиг.2 -кривая зависимости коэффициента эффективности "К" первичной обработки информации от величины смещения разрядов "N". Гравиметр содержит ротор 1, с полостью, частично заполненной жидким компонентом 2, с зеркальной свободной поверхностью, например ртутью, эталонное зеркало 3, отражающая поверхность которого выполнена параболической, опоры 4, электродвигатель 5, механически соединенный с ротором 1, источник когерентного излучения 6, полупрозрачное зеркало 7, установленное под углом 45° к оси симметрии эталонного зеркала 3 и оси симметрии ротора 1, а также к оптической оси источника когерентного излучения б, устройство регистрации 8, расположенное на одной оси с источником когерентного излучения 6, регулятор скорости вращения 9, датчик угловой скорости вращения 10, входной счетчик импульсов 11, разрядностью m+N (m - количество разрядов в представлении входного сигнала, N - постоянная, характеризующая количество предыдущи х отсчетов вы ходного сигнала, используемых при вычислении его очередного отсчета. Определяет инерционность системы и степень подавления помехи), сдвигающий регистр 12 с возможностью параллельной загрузки, параллельный регистр 13 разрядностью m+N, счетчик адреса 14 разрядностью А, где A=log2(N+1), сумматор 15 разрядностью т, селектор 16 на три направления разрядностью m+N, ОЗУ 17 емкостью N (-1, разрядностью N+m и устройство синхронизации 18, выполненное с учетом особенностей применяемой элементной базы по известной схеме генераторов жесткой синхронизации [3]. Счетный вход входного счетчика 11 подключен к выходу да тчика 10 угловой скорости, параллельный выход счетчика 11 подключен к входу параллельной загрузки сдвигающего регистра 12, выход сдвигающего регистра 12 подключен к входу первого операнда сумматора 15, выход параллельного регистра 13 подключен к входу второго операнда сумматора 15, и, со смещением на один разряд в сторону старшего разряда, к входу селектора 16, параллельный вход регистра 13 подключен к выходу селектора 16, вход/выход селектора 16 подключен к магистрали данных ОЗУ 17, магистраль адреса ОЗУ 17 подключена к параллельному выходу счетчика адреса 14, выход сумматора 15 подключен ко входу параллельной загрузки сдвигающего регистра 12 и, со смещением на N разрядов в сторону младшего разряда, к магистрали данных ОЗУ 17, счетный вход счетчика адреса 14, а также управляющие входы входного счетчика 11, сдвигающего регистра 12, параллельного регистра 13, сумматора 15, селектора 16, ОЗУ 17, счетчика адреса 14 подключены соответственно к первому - пятнадцатому вы ходам 19-33 устройства син хронизации 18. Гравиметр работает следующим образом. Ротор 1. установленный в опорах 4, приводится во вращение с помощью двигателя 5. Под действием поля центробежных сил жидкий компонент 2 отбрасывается к периферийной части полости ротора 1. В установившемся движении свободная поверхность жидкого компонента 2 имеет форму усеченного параболоида, геометрические параметры которого поддерживается неизменными. От источника когерентного излучения 6 световой сигнал, черед полупрозрачное зеркало 7, поступает на устройство регистрации 8 и интерферирует со световым сигналом, поступающим на это же устройство после отражения от соответствующи х участков свободной поверхности жидкого компонента 2, эталонного зеркала 3 м полупрозрачного зеркала 7. Если имеется отклонение формы свободной поверхности жидкого компонента 2 от номинальной заранее заданной, устройство регистрации 8 вырабатывает сигнал рассогласования и регулятор скорости 9 осуществляет изменением скорости вращения двигателя 5. Изменение величины ускорения силы тяжести приводит к изменению величины угловой скорости вращения ротора 1, которая служит мерой ускорения силы тяжести. Для измерения величины угловой скорости вращения ротора 1 служит датчик угловой скорости 10, который генерирует импульсы с частотой, пропорциональной угловой скорости вращения ротора 1. Эти импульсы поступают на счетный вход счетчика 11, который производит подсчет количества импульсов поступивши х в течение фиксированного отрезка времени t. Полученный на выходе счетчика 11 очередной отсчет входного сигнала Хп записывается в сдвигающий регистр 12, где сдвигается на N разрядов в сторону младшего разряда, что эквивалентно умножению Хп на 2-N. Одновременно в регистр 13 через селектор 16 записывается содержимое N-й ячейки ОЗУ 17, где хранится (n-N)-й отсчет выходного сигнала, смещенный на один разряд в сторону младшего разряда, что эквивалентно его умножению на 2 . В сумматоре 15 происходит арифметическое сложение содержимого сдвигающего регистра 12 и параллельного регистра 13. Результат сложения записывается в сдвигающий регистр 12, с использованием в качестве буферного регистра (N+1)-h ячейки ОЗУ 17. На следующем этапе в регистр 13 через селектор 16 записывается содержимое (N-1)-й ячейки ОЗУ 17, где хранится (n-N+1)й отсчет выходного сигнала, смещенный на два разряда в сторону младшего разряда, что эквивалентно его умножению на 2"2. В сумматоре 15 происходит арифметическое сложение содержимого сдвигающего регистра 12 и параллельного регистра 13. Результат сложения записывается в сдвигающий регистр 12, с использованием в качестве буферного регистра (N+1)-й ячейки ОЗУ 17. Содержимое регистра 13 через селектор 16 записывается в N-ю ячейку ОЗУ 17 со смещением на 1 разряд в сторону старшего разряда, что эквивалентно умножению данного кода на 2. Подобным образом происходит сложение всех N отсчетов выходного сигнала, хранящихся в ОЗУ 17. При этом, в каждом цикле к, где k=`2,`N, отсчет выходного сигнала Y(n-N+k-1)' хранящийся в (N-k+1)-й ячейке ОЗУ 17, переписывается в (N-k+2)-ю ячейку, со сдвигом на один разряд в сторону старшего разряда. По окончании N-ro цикла на выходе сумматора имеет место очередной отсчет выходного сигнала Yn, который связан с отсчетом входного сигнала Хп следующим образом Данный отсчет записывается в 1-ю ячейку ОЗУ 17 со смещением на N разрядов в сторону младшего разряда, что эквивалентно умножению на 2-N. После этого счетчик 11 вновь, в течение отрезка времени т , производит подсчет количества импульсов, поступающих с датчика угловой скорости 10 для получения следующего отсчета входного сигнала Х,п+1ч, который переписывается в сдвигающий регистр 12, где сдвигается на N разрядов в сторону младшего разряда, а затем весь процесс повторяется. Выборку необходимых ячеек ОЗУ 17 обеспечивает счетчик адреса 14, а выдержку фиксированного отрезка времени t и согласованную работу все х узлов схемы - устройство синхронизации 18. Если обозначить среднеквадратичную ошибку измерения, обусловленную возмущениями, для гравиметра, выбранного в качестве прототипа как s, а для предлагаемого гравиметра как sо , то об эффективности предлагаемой первичной обработки сигнала можно судить по отношению При этом положительный эффект будет наблюдаться в случае, когда К>1. Предположим, что на вход измерительной системы подается возмущающее воздействие в виде белого шума единичной интенсивности, что соответствует наиболее тяжелым условиям работы гравиметра. В этом случае, для гравиметра, взятого в качестве прототипа, дисперсия помехи на выходе где Wc(Jw) =.(TC2(Jw) 2+2a cTcJw + 1)-1 , - частотная характеристика чувствительного элемента; Тс - постоянная времени чувстви тельного элемента; a с - коэффициент демпфирования чувствительного элемента. Для предлагаемого гравиметра дисперсия помехи на выходе описывается выражением I где Н( J wТ) - часто тная характеристика системы первичной обработки сигнала; Т - период дискретизации входного сигнала. Тогда с учетом (3) и (4) выражение (2) можно записать в виде Если период дискретизации входного сигнала принять равным Т, то учитывая (1), можно записать В результате Z-преобразования послед-, него выражения получим Следовательно, передаточную функцию системы первичной обработки сигнала в предлагаемом гравиметре можно записать Сделав в (8) замену переменной Z jw T =е получим выражение для частотной характеристики системы Выражение для АЧХ системы получим из (9) учитывая, что е jw kT = cos(wкТ) ++J sin(wкТ) Учитывая, что полезный сигнал при гравиизмерениях расположен в инфранизкочастотной части спектра, где А(w) ~1, будем считать, что ошибка измерений обусловлена только возмущающим воздействием на чувствительный элемент гравиметра. Зависимость коэффициента К от постоянной N, полученная согласно выражению (5) с учетом выражения (10), приведена на фиг.2. При вычислениях предполагалось, что период дискретизации входного сигнала Т=0,05 с, а параметры Тс и a с равны соответственно 0,05 с и 0,5. Таким образом, предлагаемый гравиметр по сравнению с устройством - прототипом позволяет уменьшить погрешность измерения, обусловленную возмущающим воздействием, более, чем в 2 раза при N = 2 и более, чем в 41 раз при N = 8.
ДивитисяДодаткова інформація
Назва патенту англійськоюGravimeter
Автори англійськоюAbramov Yuriy Oleksiyovych, Kryvosheiev Borys Fedorovych, Serikov Serhii Anatoliiovych
Назва патенту російськоюГравиметр
Автори російськоюАбрамов Юрий Алексеевич, Кривошеев Борис Федорович, Сериков Сергей Анатольевич
МПК / Мітки
МПК: G01V 7/00
Мітки: гравіметр
Код посилання
<a href="https://ua.patents.su/6-21067-gravimetr.html" target="_blank" rel="follow" title="База патентів України">Гравіметр</a>
Лічильник з довільним коефіцієнтом лічби
Номер патенту: 16829
Опубліковано: 29.08.1997
Автор: Єрмаков Олександр Григорович
МПК: H03K 23/00
Мітки: коефіцієнтом, довільним, лічби, лічильник
Формула / Реферат:
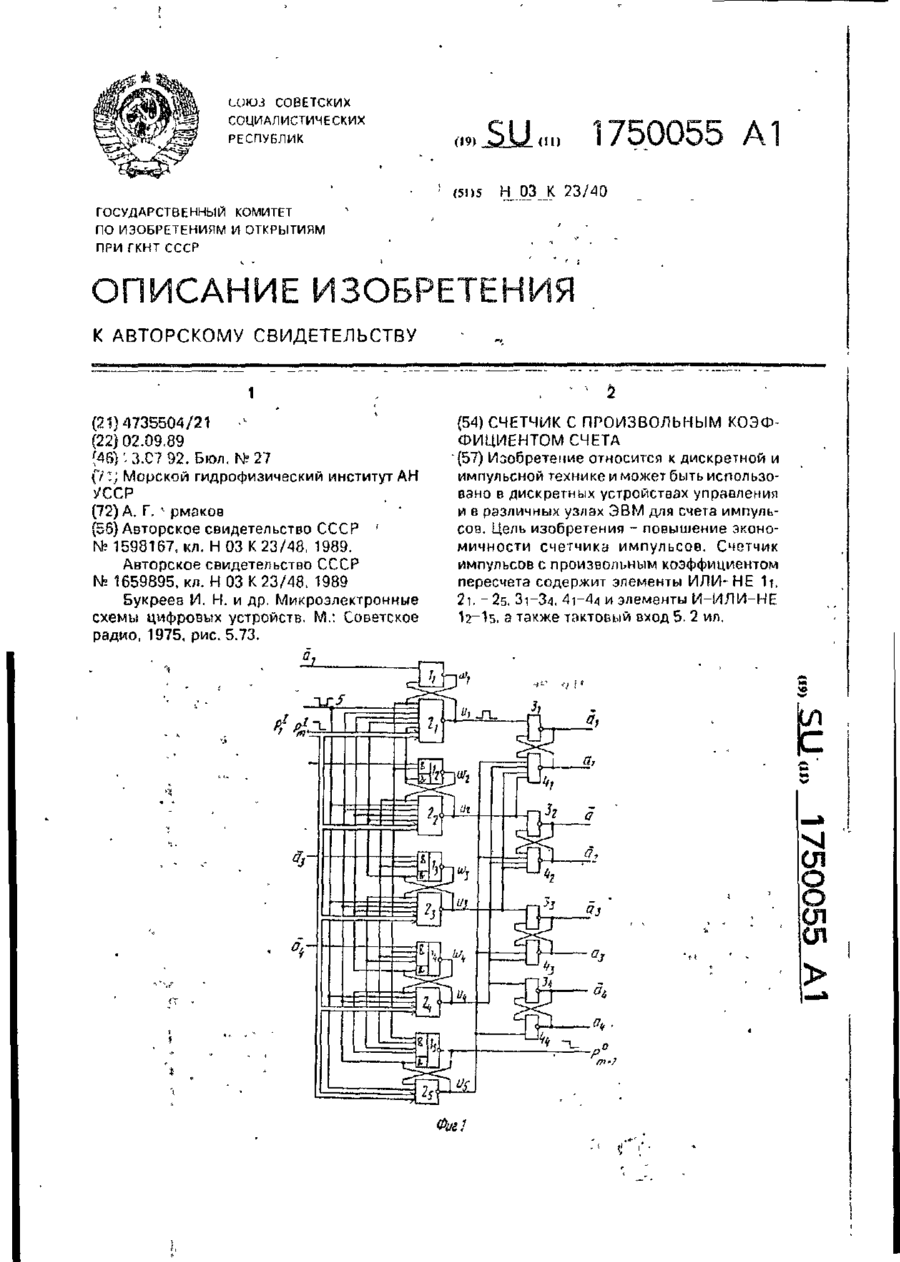
Счетчик с произвольным коэффициентом счета K=dn+1 dn... d1 = 1 +dn+1 dη...d1(2n-1< k £2n), содержащий n элементов И-ИЛИ-НЕ, причем выход j-го (j = ) элемента И-ИЛИ-НЕ соединен с (j+1)-M входом первой группы И р-го (р = ) элемента И-ИЛИ-НЕ, отличающийся тем, что, с целью повышения...
Пристрій для вимірювання фазового зсуву
Номер патенту: 457
Опубліковано: 30.04.1993
Автори: Свідлер Ігор Давидович, Токовенко Степан Омелянович
МПК: G01R 25/00
Мітки: вимірювання, зсуву, пристрій, фазового
Формула / Реферат:
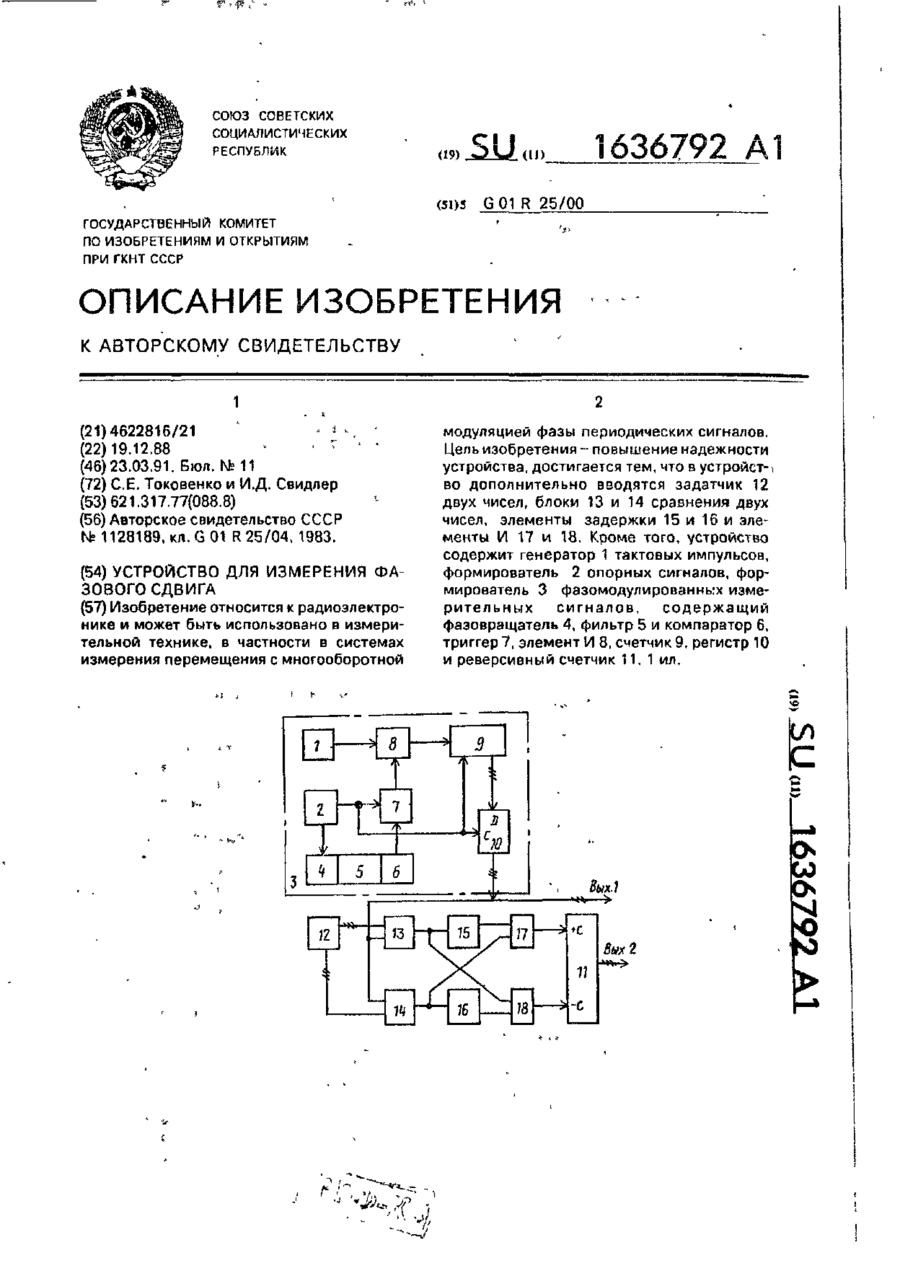
Формула изобретенияУстройство для измерения фазового сдвига, содержащее триггерный фазометр, выход которого является первым выходом устройства и реверсивный счетчик, выход которого является вторым выходом устройства, отличающееся тем, что, с целью повышения надежности устройства, в него дополнительно введены задатчик двух чисел, два блока сравнения двух чисел, два элемента задержки и два элемента И, причем выход триггерного фазометра...
Пристрій для визначення відносної кутової швидкості при коливальному процесі управління орієнтацією космічного апарата
Номер патенту: 10788
Опубліковано: 25.12.1996
Автори: Карпачов Юрій Андрійович, Павловський Михайло Антонович, Анупрієнко Генадій Єфремович
МПК: B64G 1/24
Мітки: коливальному, визначення, процесі, орієнтацією, пристрій, управління, швидкості, апарата, космічного, відносної, кутової
Формула / Реферат:
1. Устройство определения относительной угловой скорости при колебательном процессе управления ориентацией космического аппарата, содержащее измеритель абсолютной угловой скорости, отличающееся тем, что введены датчик ориентации, устройство определения экстремума, запоминающее устройство и вычитающее устройство, причем выход датчика ориентации через устройство определения экстремума подсоединен к первому входу запоминающего устройства,...
Двоічний лічильник
Номер патенту: 14181
Опубліковано: 25.04.1997
Автори: Шугаев Олександр Васильович, Нуждін Сергій Феліксович, Єрмаков Олександр Григорович
МПК: H03K 23/00
Формула / Реферат:
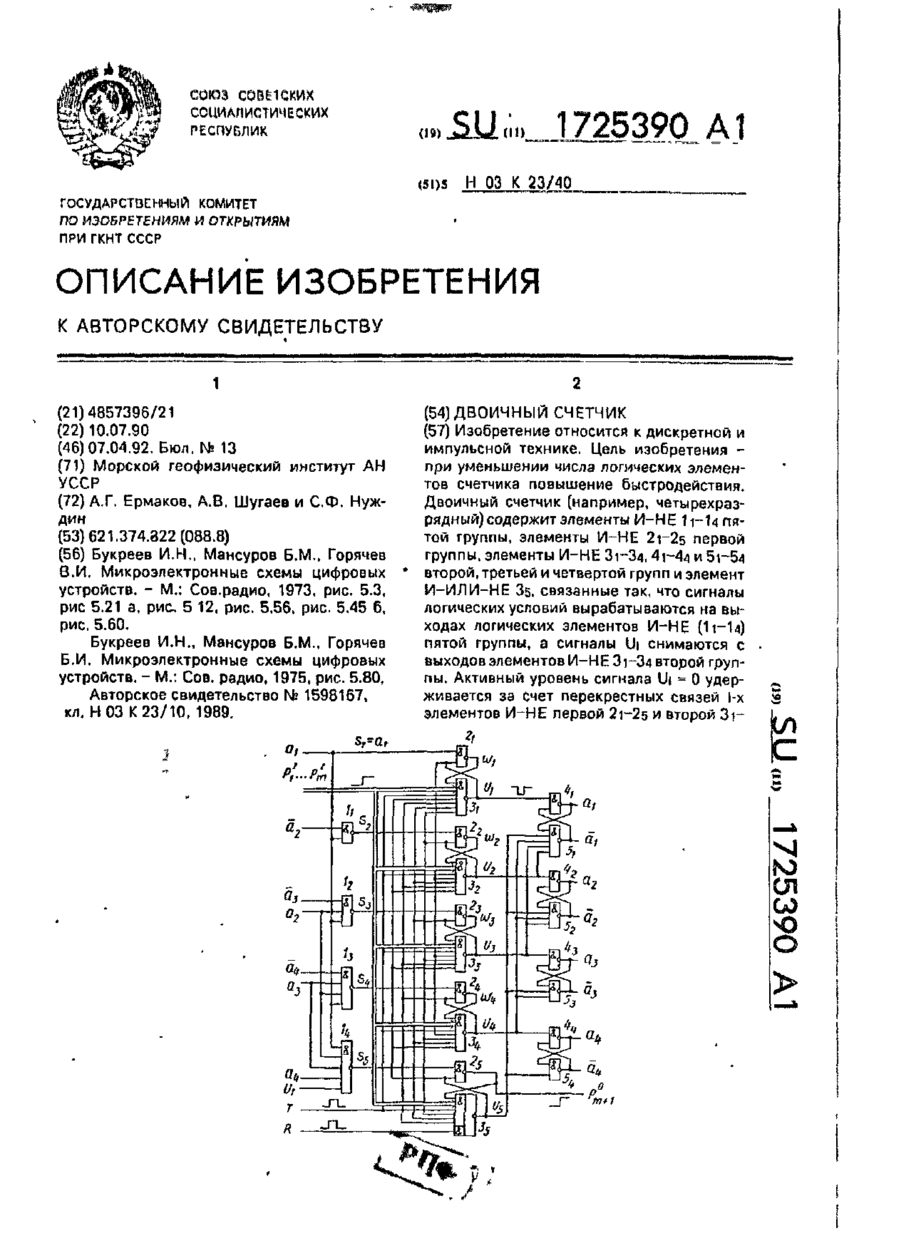
Двоичный счетчик, содержащий (n+1) элементов И-НЕ первой группы, по n элементов И-НЕ во второй, третьей, четвертой и пятой группах, выход і-го (i=1, n n>1) элемента И-НЕ первой группы соединен с первым входом і-го элемента И-НЕ второй группы, выход которого подключен к первому входу і-го элемента И-НЕ первой группы, выход і-го элемента И-НЕ третьей группы, являющийся і-м прямым выходом счетчика, соединен с первым входом і-го элемента...
Лічильник електроенергії
Номер патенту: 1742
Опубліковано: 25.10.1994
Автори: Смілянський Ігор Ісаакович, Кизилов Володимир Улянович, Давидов Анатолій Семенович
МПК: G01R 11/00
Мітки: лічильник, електроенергії
Формула / Реферат:
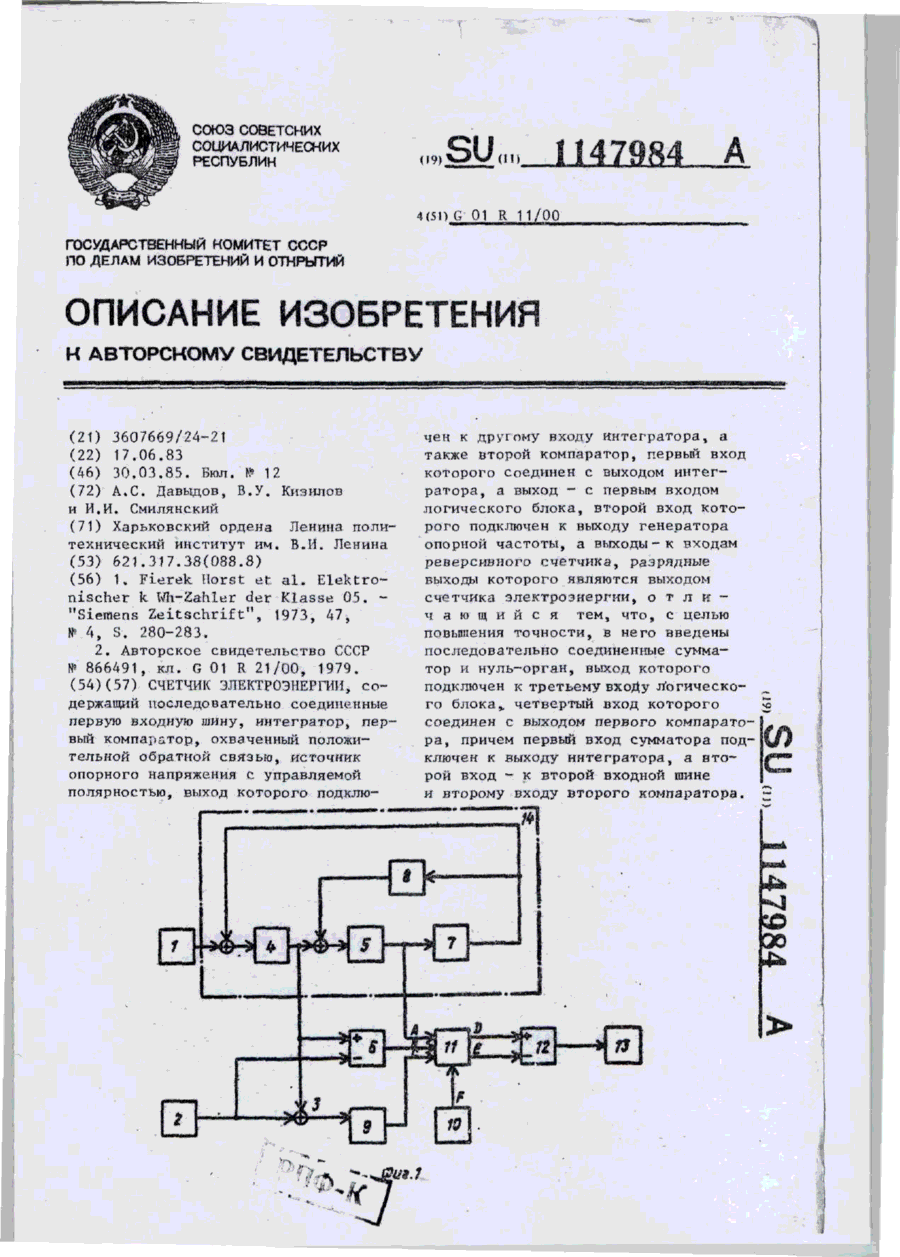
Счетчик электроэнергии, содержащий последовательно соединенные первую входную шину, интегратор, первый компаратор, охваченный положительной обратной связью, источник опорного напряжения с управляемой полярностью, выход которого подключен к другому входу интегратора, а также второй компаратор, первый вход которого соединен с выходом интегратора, а выход — с первым входом логического блока, второй вход которого подключен к выходу генератора...
Попередній патент: Пристрій для вентилювання взуття
Наступний патент: Спосіб збезводнювання флотаційного концентрату
Випадковий патент: Механізм петельників швейної машини