Гравіметр
Номер патенту: 53478
Опубліковано: 15.01.2003
Автори: Безвесільна Олена Миколаївна, Бобруйко Євген Ігоревич, Меншикова Катерина Вікторівна, Нечай Сергій Олексійович, Тулупов Дмитро Григорович
Формула / Реферат
Гравіметр, виконаний на основі триступеневого гіроскопа, що містить ротор, центр мас якого зміщений вздовж осі обертання відносно осей карданового підвісу, датчики кута та датчики моменту для реєстрації та компенсації відхилень ротора, який відрізняється тим, що ротор приєднаний до привідного вала через пружні торсіони, перпендикулярні до осі привідного вала, та карданові кільця, при цьому обертання привідного вала забезпечує двигун, кутова швідкість якого відповідає вимозі динамічної настройки, а датчики кута та датчики моменту розташовані на корпусі приладу.
Текст
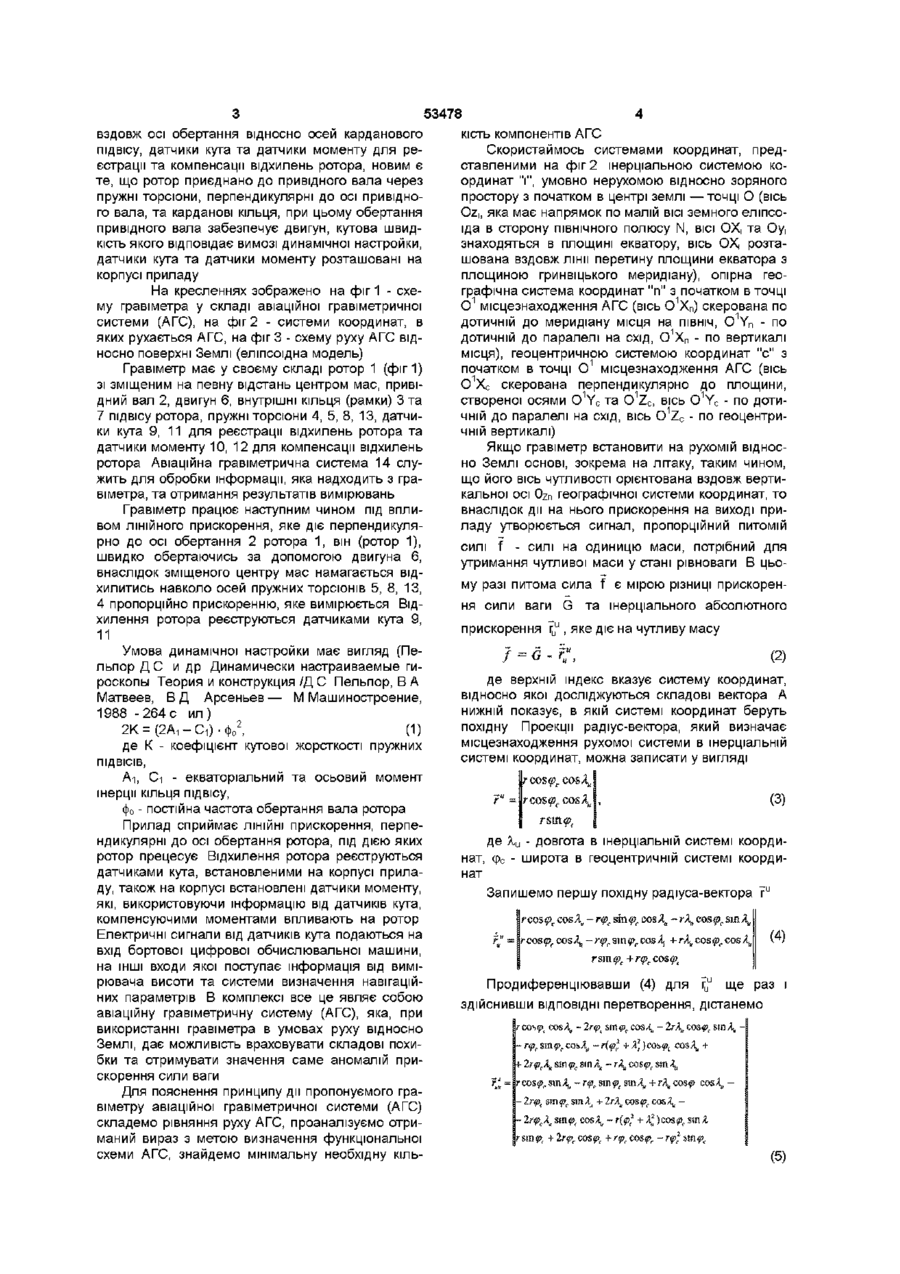
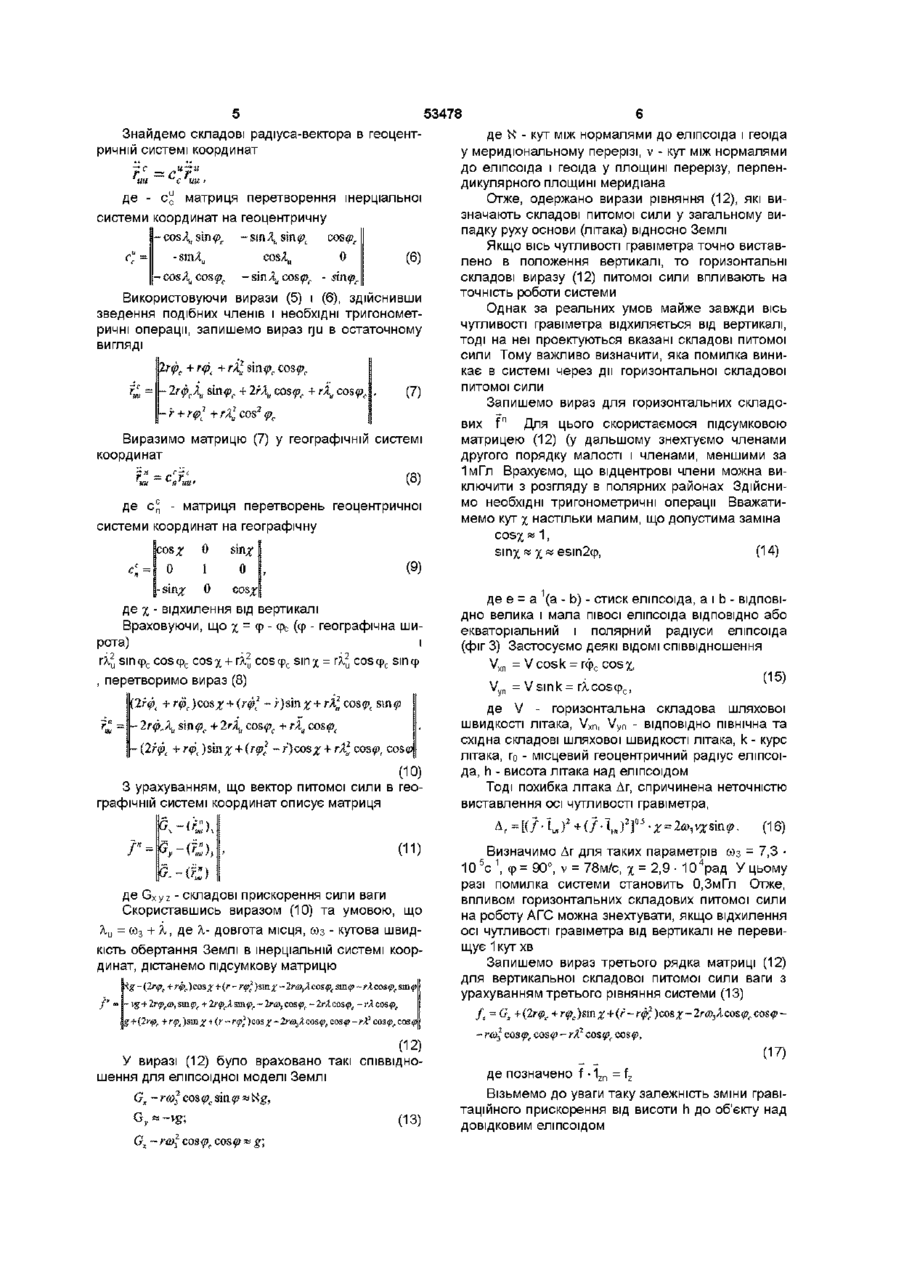
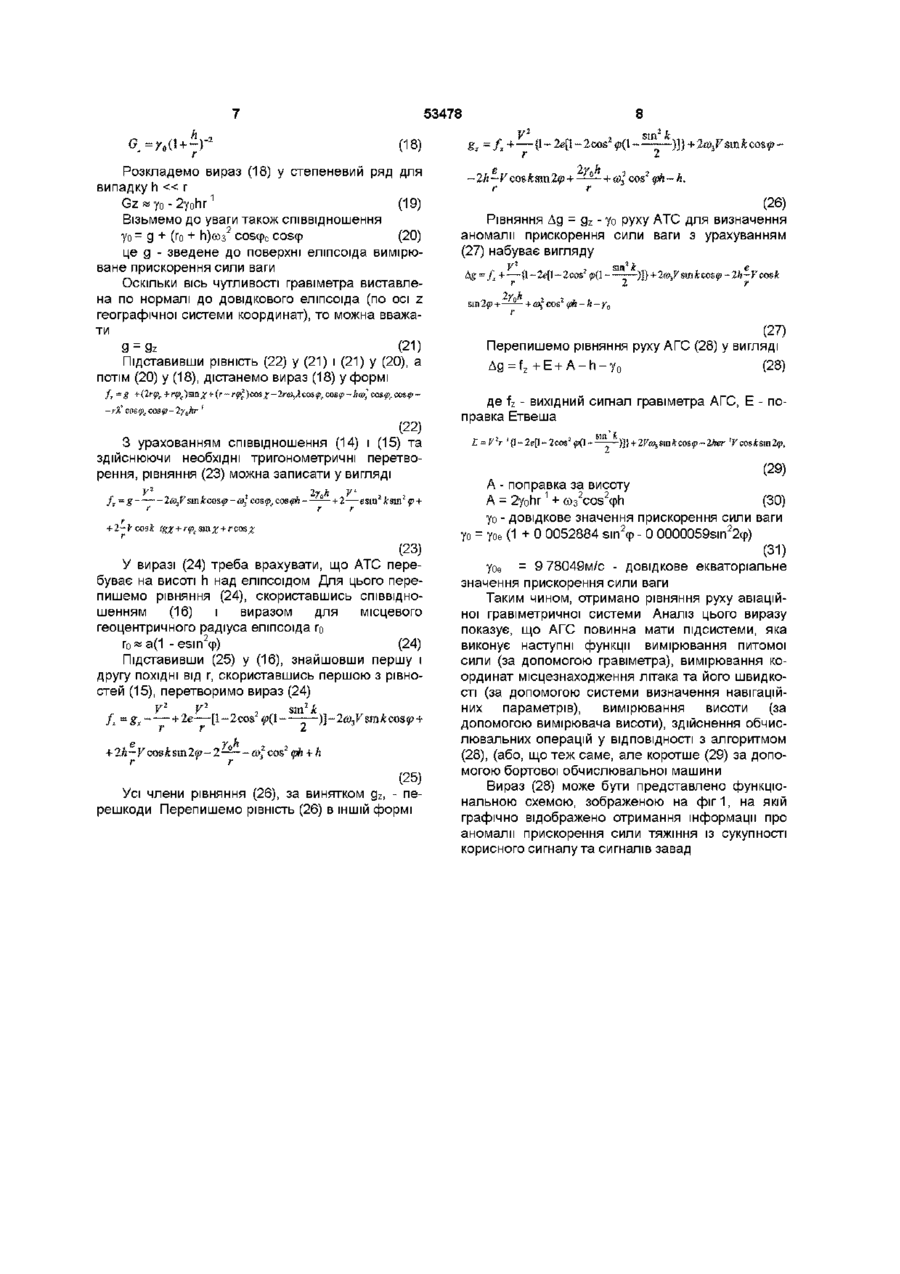
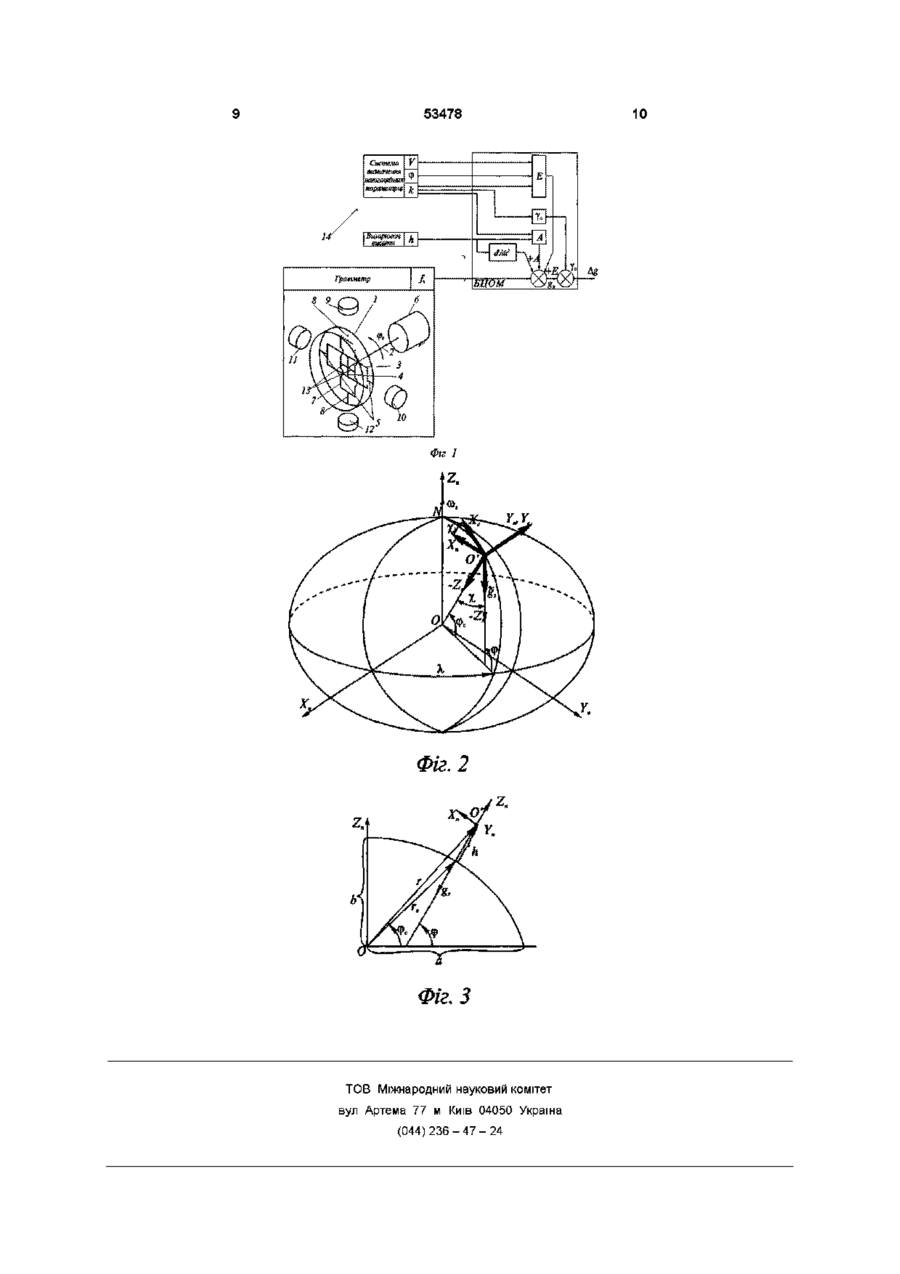
Гравіметр, виконаний на основі триступеневого гіроскопа, що містить ротор, центр мас якого зміщений вздовж осі обертання відносно осей карданового підвісу, датчики кута та датчики моменту для реєстрації та компенсації відхилень ротора, який відрізняється тим, що ротор приєднаний до привідного вала через пружні торсюни, перпендикулярні до осі привідного вала, та карданові кільця, при цьому обертання привідного вала забезпечує двигун, кутова ШВІДКІСТЬ якого відповідає вимозі динамічної настройки, а датчики кута та датчики моменту розташовані на корпусі приладу Винахід відноситься до області гравіметричних вимірювань на рухомій основі та може бути використаний в геодезії, геологи, шерціальних системах навігації ВІДОМІ гіроскопічні гравіметри з двома степенями свободи (див авторське свідоцтво №317021, кл G01V7/00, 1971 - «Бюллетень изобретений», №30) Такі гравіметри мають двоступеневий гіроскоп, датчик кута та датчик моменту для створення моменту, компенсуючого момент прискорення сили ваги Вихідною величиною цих гіроскопічних гравіметрів є кутова швидкість повороту гіроскопа відносно основи, пропорційна прискоренню сили ваги Ці прилади мають значні габаритні розміри та недостатньо високу точність для гравіметрів В якості прототипу прийнято гіроскопічний інтегратор ЛІНІЙНИХ прискорень (див Ривкин С С Теория гироскопических устройств Судостроение Л , т 2, 1964, стр 252), який використовується в якості гравіметра Він являє собою триступеневий гіроскоп, розміщений у внутрішній та ЗОВНІШНІЙ рамках, центр мас якого зміщений вздовж осі зовнішньої рамки гіроскопа, яка зорієнтована в площині географічного меридіана, відносно осі зовні інтегратор наділяють системою міжрамкової корекції, яка містить датчик кута та датчик моменту Вихід датчика кута, розміщеного на осі внутрішньої рамки гіроскопа, з'єднаний з обмоткою керування датчика моменту, розміщеного на осі зовнішньої рамки проштегратора Гіроскопічний інтегратор ЛІНІЙНИХ прискорень інтегрує корисний сигнал Його вихідний сигнал у вигляді кутової швидкості повороту гіроскопа навколо осі зовнішньої рамки пропорційний прискоренню сили ваги Такий гравіметр потребує використання пристроїв для вимірювання кутової швидкості повороту гіроскопа, які повинні мати малі габарити, невеликий момент зворотного діяння, низький поріг чутливості Однак, реалізація таких пристроїв є складною технічною задачею та може бути досягнута шляхом подорожчання приладу та, як правило, зниження його надійності шньої дає можливість при ВІДПОВІДНОСТІ параметрів умо рамки Під ДІЄЮ ЛІНІЙНОГО прискорення (зокрема, прискорення сили ваги) гіроскоп прецесує навколо осі зовнішньої рамки, при цьому кутова швидкість прецесії пропорційна проекції прискорення сили ваги на цю вісь Для утримання головної осі гіроскопа в положенні, перпендикулярному до площини зовнішньої рамки, гіроскопічний Гіроштегратор має значні габарити ( 1 3 x 1 5 ) 10 2 м та недостатньо високу точність, підвищення якої обмежується наявністю моментів тертя у підшипникових вузлах В основу винаходу поставлено задачу удосконалити гравіметр шляхом того, що тристепеневий гіроскоп виконано динамічно настроюваним, що вам динамічної настройки отримувати більш високі ТОЧНІСНІ характеристики вимірювань за рахунок відсутності моментів сухого тертя у ПІДВІСІ ротора Поставлена задача виконується тим, що в гравіметрі, виконаному на основі тристепеневого гіроскопу, що містить ротор, центр мас якого зміщений 00 со Ю 53478 вздовж осі обертання відносно осей карданового підвісу, датчики кута та датчики моменту для реєстрації та компенсації відхилень ротора, новим є те, що ротор приєднано до привідного вала через пружні торсюни, перпендикулярні до осі привідного вала, та карданові кільця, при цьому обертання привідного вала забезпечує двигун, кутова швидкість якого відповідає вимозі динамічної настройки, датчики кута та датчики моменту розташовані на корпусі приладу На кресленнях зображено на фіг 1 - схему гравіметра у складі авіаційної гравіметричної системи (АГС), на фіг 2 - системи координат, в яких рухається АГС, на фіг 3 - схему руху АГС відносно поверхні Землі (еліпсоїдна модель) Гравіметр має у своєму складі ротор 1 (фіг 1) зі зміщеним на певну відстань центром мас, привідний вал 2, двигун 6, внутрішні кільця (рамки) 3 та 7 підвісу ротора, пружні торсюни 4, 5, 8, 13, датчики кута 9, 11 для реєстрації відхилень ротора та датчики моменту 10, 12 для компенсації відхилень ротора Авіаційна гравіметрична система 14 служить для обробки інформації, яка надходить з гравіметра, та отримання результатів вимірювань Гравіметр працює наступним чином під впливом ЛІНІЙНОГО прискорення, яке діє перпендикулярно до осі обертання 2 ротора 1, він (ротор 1), швидко обертаючись за допомогою двигуна 6, внаслідок зміщеного центру мас намагається відхилитись навколо осей пружних торсюнів 5, 8, 13, 4 пропорційно прискоренню, яке вимірюється Відхилення ротора реєструються датчиками кута 9, 11 Умова динамічної настройки має вигляд (Пельпор Д С и др Динамически настраиваемые гироскопы Теория и конструкция/Д С Пельпор, В А Матвеев, В Д Арсеньев — М Машиностроение, 1988 -264с ил) 2К= (2Аі-Сі) -фо2, (1) де К - коефіцієнт кутової жорсткості пружних ПІДВІСІВ, А-і, Сі - екваторіальний та осьовий момент інерції кільця підвісу, ф - постійна частота обертання вала ротора о Прилад сприймає ЛІНІЙНІ прискорення, перпендикулярні до осі обертання ротора, під дією яких ротор прецесує Відхилення ротора реєструються датчиками кута, встановленими на корпусі приладу, також на корпусі встановлені датчики моменту, які, використовуючи інформацію від датчиків кута, компенсуючими моментами впливають на ротор Електричні сигнали від датчиків кута подаються на вхід бортової цифрової обчислювальної машини, на ІНШІ входи якої поступає інформація від вимірювача висоти та системи визначення навігаційних параметрів В комплексі все це являє собою авіаційну гравіметричну систему (АГС), яка, при використанні гравіметра в умовах руху відносно Землі, дає можливість враховувати складові похибки та отримувати значення саме аномалій прискорення сили ваги Для пояснення принципу дії пропонуємого гравіметру авіаційної гравіметричної системи (АГС) складемо рівняння руху АГС, проаналізуємо отриманий вираз з метою визначення функціональної схеми АГС, знайдемо мінімальну необхідну кіль кість компонентів АГС Скористаймось системами координат, представленими на фіг 2 шерціальною системою координат "і", умовно нерухомою відносно зоряного простору з початком в центрі землі —точці О (вісь Ozi, яка має напрямок по малій ВІСІ земного еліпсоїда в сторону ПІВНІЧНОГО полюсу N, ВІСІ ОХ, та О у, знаходяться в площині екватору, вісь ОХ, розташована вздовж лінії перетину площини екватора з площиною гринвіцького меридіану), опірна географічна система координат "п" з початком в точці 1 1 О місцезнаходження АГС (вісь О ХП) скерована по 1 дотичній до меридіану місця на ПІВНІЧ, O Yn - по 1 дотичній до паралелі на схід, О ХП - по вертикалі місця), геоцентричною системою координат "с" з 1 початком в точці О місцезнаходження АГС (вісь 1 О ХС скерована перпендикулярно до площини, створеної осями O1YC та O1ZC, вісь O1YC - по дотичній до паралелі на схід, вісь O1ZC - по геоцентричній вертикалі) Якщо гравіметр встановити на рухомій відносно Землі основі, зокрема на літаку, таким чином, що його вісь чутливості орієнтована вздовж вертикальної осі Ozn географічної системи координат, то внаслідок дії на нього прискорення на виході приладу утворюється сигнал, пропорційний питомій силі f - силі на одиницю маси, потрібний для утримання чутливої маси у стані рівноваги В цьому разі питома сила f є мірою різниці прискорення сили ваги G та шерціального абсолютного прискорення ruu, яке діє на чутливу масу (2) де верхній індекс вказує систему координат, відносно якої досліджуються складові вектора А нижній показує, в якій системі координат беруть похідну Проекції радіус-вектора, який визначає місцезнаходження рухомої системи в шерціальній системі координат, можна записати у вигляді (3) rcos*pc cosAa де A,u - довгота в шерціальній системі координат, фс - широта в геоцентричній системі координат Запишемо першу похідну радіуса-вектора ?и ^ + rl ш/ре COSA^ -2rXvcos.
ДивитисяДодаткова інформація
Назва патенту англійськоюGravimeter
Автори англійськоюBezvesilna Olena Mykolaivna
Назва патенту російськоюГравиметр
Автори російськоюБезвесильна Елена Николаевна
МПК / Мітки
МПК: G01V 7/00
Мітки: гравіметр
Код посилання
<a href="https://ua.patents.su/5-53478-gravimetr.html" target="_blank" rel="follow" title="База патентів України">Гравіметр</a>
Гравіметр
Номер патенту: 21067
Опубліковано: 04.11.1997
Автори: Кривошеєв Борис Федорович, Серіков Сергій Анатольйовіч, Абрамов Юрій Олексійович
МПК: G01V 7/00
Мітки: гравіметр
Формула / Реферат:
Гравиметр, содержащий ротор с полостью, заполненной жидким компонентом, имеющим свободную поверхность, двигатель, механически соединенный с ротором, эталонное зеркало, отражающая поверхность которого, выполнена параболической, источник когерентного излучения, полупрозрачное зеркало, установленное под углом 45° к оси симметрии эталонного зеркала и оси симметрии ротора, а также к оптической оси источника когерентного излучения, устройство...
Гравіметр для вимірювання абсолютного значення прискорення сили ваги
Номер патенту: 6921
Опубліковано: 31.03.1995
Автор: Федоровський Борис Миколайович
МПК: G01V 7/00
Мітки: значення, абсолютного, гравіметр, прискорення, вимірювання, ваги, сили
Формула / Реферат:
(57) . Гравиметр для измерения абсолютного значения ускорения силы тяжести, содержащий пробное тело, выполненное в виде уголкового светоотражателя и помещенное в вакуумную камеру, интерферометр, систему измерения пути и времени свободного движения пробного тела, блок управления измерениями и катапульту для подбрасывания пробного тела вертикально вверх на заданную высоту, состоящую из катушки соленоида и сердечника, связанного с...
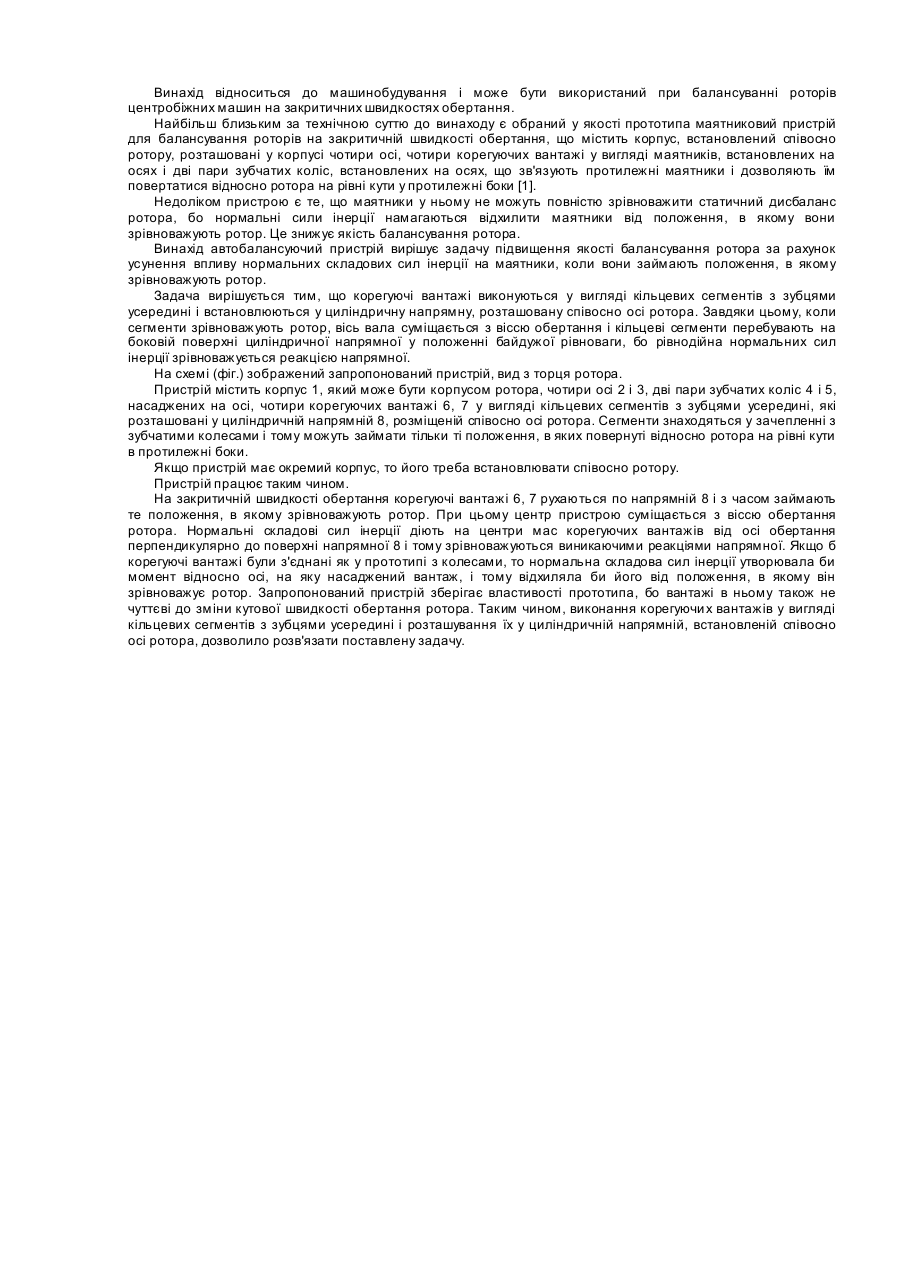
Автобалансуючий пристрій
Номер патенту: 36244
Опубліковано: 16.04.2001
Автор: Філімоніхін Геннадій Борисович
МПК: G01M 1/38
Мітки: автобалансуючий, пристрій
Текст:
...корегуючого вантажу до зміни кутової швидкості обертання ротора з'являється після його повороту навколо осі, що весь час перпендикулярна валу, бо після цього друга вісь перестає бу ти перпендикулярною до осі обертання ротора. Чим більший цей кут повороту, тим більша чутливість корегуючого вантажу до зміни кутової швидкості обертання ротора Тому пристрій найменш чутливий до зміни кутової швидкості обертання ротора при незначних...
Автобалансуючий пристрій
Номер патенту: 21797
Опубліковано: 30.04.1998
Автор: Філімоніхін Геннадій Борисович
МПК: G01M 1/38
Мітки: автобалансуючий, пристрій
Формула / Реферат:
Автобалайсуючий пристрій, що містить корпус, встановлений співосно ротору, розташовані у корпусі чотири осі, дві пари зубчатих коліс, встановлених на осях і чотири корегуючі вантажі, кінематично з'єднані колесами, який відрізняється тим, що корегуючі вантажі виконані у вигляді кільцевих сегментів з зубцями усередині і встановлені у циліндричну напрямну, розміщену співосно осі ротора.
Маслоробка побутова

Номер патенту: 44483
Опубліковано: 15.02.2002
Автори: Коненко Ігор Євгенович, Матвійцов Володимир Петрович, Ванкевич Петро Іванович, Біда Ярослав Михайлович
МПК: A01J 15/00
Мітки: побутова, маслоробка
Формула / Реферат:
Маслоробка побутова, що містить нерухому раму, ротор, який являє собою розташовану в каркасі знімну ємність з кришкою та концентратором масла, та опорний вузол, виконаний у вигляді пари цапф, яка відрізняється тим, що вона має механічний привід і фіксатор, встановлені на нерухомій рамі, каркас ротора, виконаний в вигляді замкнутої рухомої рамки, причому цапфи встановлені на її бокових стійках, вісь обертання ротора перпендикулярна до осі...
Попередній патент: Спосіб відновлення чавунних циліндричних порожнистих не-базових деталей сільськогосподарської техніки
Наступний патент: Пристрій для кріплення та визволення інструмента
Випадковий патент: Світильник